
Abstract
A coverage problem is one of the important issues to prolong the lifetime of a wireless sensor network while guaranteeing that the target region is monitored by a sufficient number of active nodes. Most of existing protocols use geometric algorithm for each node to estimate the degree of coverage and determine whether to monitor around or sleep. These algorithms require accurate information about the location, sensing area, and sensing state of neighbor nodes. Therefore, they suffer from localization error leading to degradation of coverage and redundancy of active nodes. In addition, they introduce communication overhead leading to energy depletion. In this paper, we propose a novel coverage control mechanism, where each node relies on neither accurate location information nor communication with neighbor nodes. To enable autonomous decision on nodes, we adopt the nonlinear mathematical model of adaptive behavior of biological systems to dynamically changing environment. Through simulation, we show that the proposal outperforms the existing protocol in terms of the degree of coverage per node and the overhead under the influence of localization error.
1. Introduction
A wireless sensor network [1] has been attracting many researchers over the past ten years for a variety of its applications [2]. Among them, surveillance, monitoring, and observation of items, objects, and regions are most promising and useful. These applications require that a sufficient number of sensor nodes monitor the target region. Due to the uncertainty and instability of location and sensing area, it is difficult to deploy and manage sensor nodes in an optimal manner, that is, placing a minimum number of sensor nodes at the optimal positions. Therefore, a redundant number of sensor nodes are generally deployed in the target region. Then, for energy conservation, a sophisticated sleep scheduling mechanism is employed to keep the number of active sensor nodes as small as possible and let sensor nodes sleep as much as possible while satisfying the application's requirement on the degree of coverage. Such an issue to minimize the number of active sensor nodes while guaranteeing the required degree of coverage is called coverage problem [3–5]. There are many proposals on coverage problem. However, most of them rely on unrealistic assumptions, for example, accurate location and perfect circular sensing area, and do not work well in the error-prone environment.
In this paper, to solve the problem, we propose a novel coverage control protocol, which is free from the above-mentioned unrealistic assumptions. Each sensor node does not need to know the shape and size of sensing area and the location and state of neighbor sensor nodes. A sensor node only relies on the information about the degree of coverage of the target region. To enable autonomous decision on sensor nodes, we adopt the nonlinear mathematical model called the attractor selection model. The model imitates flexible and adaptive behavior of biological systems to dynamically changing environment [6]. A biological system can autonomously and adaptively select an appropriate state for the environment only based on the condition of itself. Through simulation, we show that the proposal outperforms an existing protocol in the terms of the degree of coverage per sensor node under the influence of localization error. In addition, our proposal requires less energy in monitoring the target region.
The remainder of this paper is organized as follows. First in Section 2, we briefly discuss related work. Next, in Section 3, we introduce the biological attractor selection model. Then, in Section 4, we propose a novel coverage maintenance protocol adopting the attractor selection model. In Section 5, we evaluate the proposal through comparison with an existing protocol. Finally, in Section 7, we conclude this paper and discuss future work.
2. Related Work
There are many proposals on coverage problem, but most of them use geometric algorithm in order to estimate the degree of coverage. Based on the estimated degree of coverage, each sensor node determines whether to monitor around or sleep. For example, CCP [7] adopts the so-called
3. Attractor Selection Model
The attractor selection model imitates the adaptive metabolic synthesis of Escherichia coli cells to dynamically changing nutrient condition [6]. A mutant bacterial cell has a metabolic network consisting of two mutually inhibitory operons, each of which synthesizes the different nutrient. When a cell is in the neutral medium, where both nutrients sufficiently exist, mRNA concentrations dominating protein production are at the similar level. This means that a cell can live and grow independently of the nutrient, which the cell synthesizes. Once one of nutrients becomes insufficient in the environment, the level of gene expression of an operon corresponding to the missing nutrient eventually increases so that a cell can survive by compensating the nutrient. Although there is no embedded adaptation rule as a signal transduction pathway, a cell can successfully adapt gene expression in accordance with the surrounding condition.
In the attractor selection model, the dynamics of mRNA concentration
Now let us explain the dynamics of mRNA concentrations following the attractor selection model. An attractor is a stable state, where a nonlinear dynamic system reaches after an arbitrary initial state. When the activity A is high, the nonlinear dynamic system formulated by the above equations has one attractor where
The attractor selection model is a kind of metaheuristics of optimization problem with dynamically changing given conditions. In the model, possible solutions are defined as attractors of the dynamic system by stochastic differential equations. An objective function to maximize is defined as the activity. In the biological case, a bacterial cell adaptively selects one of solutions, that is, synthesis of either one of two nutrients, so that the cell can maximize its growth rate according to the environmental nutrient condition. In our application of the attractor selection model to coverage control, a sensor node selects one of two states, that is, monitor around or sleep, to maximize the activity defined as the degree of coverage in the target region.
4. Attractor Selection-Based Coverage Control
In this section, we first outline the basic behavior of our proposal. Then, we describe the attractor selection model adopted in our proposal and the definition of the activity in coverage control. Finally, we describe the detailed behavior of sensor nodes in our proposal.
4.1. Overview of Our Proposal
In this paper, we consider a periodic monitoring application, where a sink collects sensing data from sensor nodes at regular intervals as illustrated in Figure 1. We refer to the interval as data gathering interval and the beginning of data gathering as timing of data gathering. We define the duration from the nth timing of data gathering until just before the

Overview of our proposal.
At each timing of data gathering, each sensor node, which was active in the preceding round, transmits a message to a sink by single or multihop communication. A message consists of sensing data and the information for the sink to estimate the degree of coverage of the target region. Since we focus on coverage control, we do not assume any specific data-gathering mechanism to collect sensing data from sensor nodes. We also assume that the connectivity is maintained when the sufficient coverage is achieved [7]. Using received messages, a sink evaluates the degree of coverage of the target region. The way to evaluate the degree of coverage depends on the requirement of application and the information that sensor nodes can provide. When any localization mechanism is available at sensor nodes, the coverage is estimated based on the relative or absolute location of sensor nodes. An identifier of objects that a sensor node monitors is also useful information when a sink knows locations of the objects in the target region. In this case, each sensor node does not need to know its own location. From the degree of coverage, a sink derives the activity.
Then, a sink disseminates the activity information over a wireless sensor network by using any efficient dissemination mechanism, for example, flooding, gossiping, or tree-based. Not only sensor nodes that are active in the preceding round but also one whose sleep timer expires at the timing of data gathering receives the activity. Sensor nodes that receive the activity decide whether to be active or sleep using the attractor selection model-based state selection mechanisms described below. If a sensor node decides to be active, it starts monitoring its surroundings. Otherwise, the sensor node sets its sleep timer at multiples of data-gathering interval and sleep immediately.
4.2. Extended Attractor Selection Model
In our proposal, we use the following attractor selection model, which is introduced in [11] for adaptive ad hoc network routing:

This model has two attractors, that is,
4.3. Derivation of Activity
In our proposal, as stated in Section 4.1, any estimation algorithm of the degree of coverage can be adopted. In this paper, we consider the following derivation for the sake of easy implementation and comparison. First, the target region is divided into small regions of
Guaranteeing any point of the target region to be monitored by k active sensor nodes is called k-coverage. When an application requires k-coverage, the sensing ratio

The sensing ratio S does not take into account the excess and deficiency in monitoring, that is, whether a patch is in the sensing area of more or less than k active sensor nodes. Therefore, coverage control using the sensing ratio S as the activity α leads to the waste of energy or deficient coverage. To solve this problem, we formulate the excess and deficiency ratio

Then, the activity α for the whole target region is derived as follows:

For fine-grained control, we can also define the area activity using the sensing ratio per small areas of the target region. In this case, the target region is divided into some subareas of

We formulate the excess and deficiency ratio

Then, the activity

The activity derived by (8) is called the area activity. In the case of the area activity-based control, a sink evaluates all area activities
4.4. Node Behavior
A sensor node has three states, that is, active, sleep, and intermediate as illustrated in Figure 2. In each state, a sensor node behaves as follows.
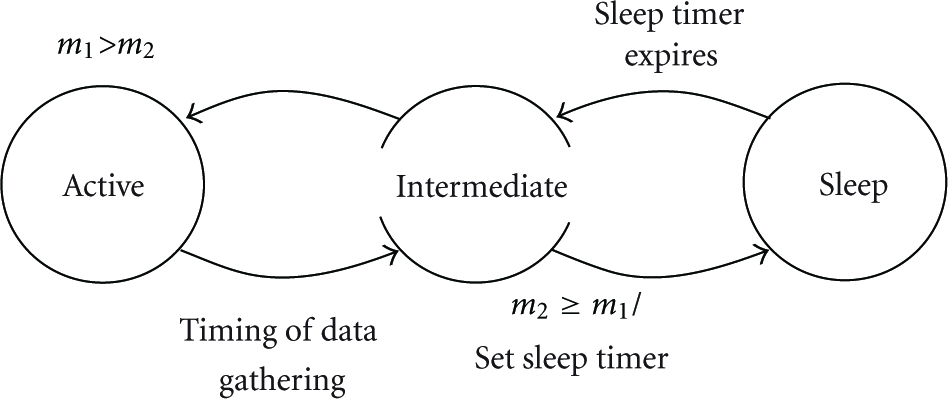
State diagram of our proposal.
4.4.1. Active State
A sensor node monitors its sensing area by turning and keeping sensor modules on and transceiver modules off for the fixed period
4.4.2. Sleep State
A sensor node turns and keeps all modules off to save its battery. When a sleep timer expires, a sensor node turns on transceiver modules and moves to the intermediate state.
4.4.3. Intermediate State
A sensor node waits for receiving a feedback message from the sink during the fixed period
Next, we briefly explain how a sensor node behaves in message transmission in simulation. In the case of a sensor node which was in the active state in the preceding round, it participates in both data gathering and feedback dissemination as illustrated in Figure 3. At the end of active period

Behavior of sensor nodes on i-hop.
During feedback dissemination, a sensor node located at i hop from a sink first receives a feedback message from its parent sensor node during the intermediate interval
4.5. Advantages of Our Proposal
Our proposal have advantages over existing protocols, which require a sensor node to obtain the information of neighbor sensor nodes, that is, location and state. First, our proposal is more robust against the inaccuracy of location information and the irregularity or uncertainty of sensing area than others. In our proposal, a sensor node only requires the degree of coverage of the whole target region or the located area. Even if the derivation of the degree of coverage at a sink uses location information of sensor nodes, the influence of localization error can be mitigated by considering the degree of coverage over the whole target region or the area of a certain size.
Second, our proposal requires less energy in coverage control than others. In other existing proposals, so that a sensor node can appropriately determine the next state using a geometric algorithm, it has to collect sufficient amount of information by receiving many messages from neighbor sensor nodes. Although a sensor node only needs to broadcast a message once to inform neighbor sensor nodes of its information, such message exchanges must be done in addition to regular message transmission for data gathering. On the other hand, our proposal only requires a sensor node to obtain the activity for selecting its sensing state. A sensor node only needs to transmit one message for data gathering and one more for feedback dissemination. Therefore, a sensor node can effectively turn off its transceiver for longer duration than others. These advantages of our proposal will be proved by simulation in the next section.
5. Simulation Experiments
In this section, we first explain error models, that is, localization error and shape error. Simulation results follow to compare our proposal with CCP in terms of the sensing ratio, the number of active sensor nodes, the redundancy ratio, the contribution ratio, and the energy consumption.
5.1. Localization Error
Based on [12], we consider a simple model of localization error. The amount of error is uniformly distributed between
In our proposal, a sink evaluates the global or area activity with wrong location information received from neighbor sensor nodes. Therefore, the activity notified to sensor nodes is different from the actual degree of coverage. On the other hand, a sensor node with CCP calculates intersections of sensing areas based on wrong location information. Therefore, the
5.2. Shape Error
Since there is no model of the irregularity of sensing area, we adopt the model of the irregularity of radio propagation introduced in [13]. RIM (Radio Irregularity Model) models the variation in the received signal strength under the influence of heterogeneous energy loss. In wireless communication, the signal strength decreases in accordance with the distance from the transmitter. The following is the commonly used model to estimate path loss L [dBm] [14]:


R represents the received signal strength and T corresponds to the transmission power. F corresponds to the fading effect.

Here,
For example, we depict the impact of different DOI in Figure 4. Each shape shows the border of region where the received signal strength exceeds a certain threshold. As can be seen, DOI = 0 gives a circular shape. As DOI increases, the shape becomes more irregular. We first set parameters of RIM appropriately to obtain the regular circle shape of the desired sensing radius and then change DOI to see the influence of irregularity in simulation experiments.
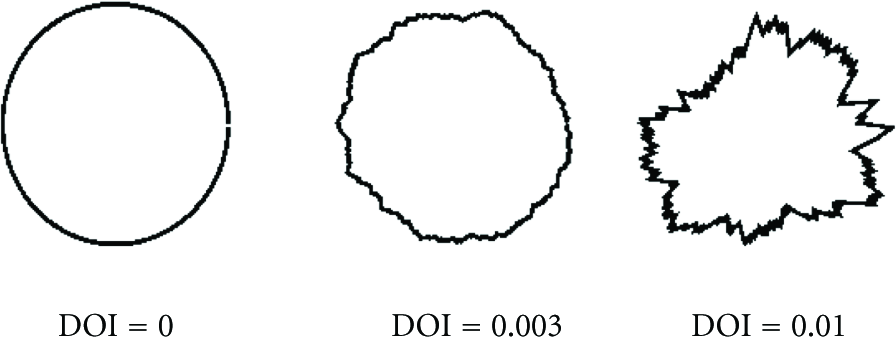
Irregular sensing area.
5.3. Energy Model
We define the energy model based on MICAz [15, 16]. CPU consumes 8 [mA] when it is on and 15 [uA] when it is off. A transceiver module consumes 19.7 [mA] in listening a channel and receiving a message and 17.4 [mA] in transmitting a message. A sensor module consumes 10 [uA] when it is on and 0 [uA] when it is off. When a sensor module monitors objects, CPU is activated as well. We assume that a sensor node runs on two AA batteries of 3 [V].
As explained in Section 4.4, we consider a tree-based routing for data gathering and feedback dissemination. In data gathering, a sensor node receives sensing data from its child sensor nodes, generates the aggregated data of the same size of a single sensing data, and sends it to a parent sensor node. In disseminating feedback messages, a sensor node receives a message containing the activity from its parent sensor node and broadcasts it to all child sensor nodes.
5.4. Simulation Setting
We distribute about 10,000 sensor nodes in the square target region. A sink is located in the center of the target region. In the case of the global activity-based control, 10,000 sensor nodes are randomly deployed in the target region of
In our proposal, both
The communication range
5.5. Performance Measures
As performance measures, we use the number of active nodes N, the contribution ratio B, the redundancy ratio U, and the energy consumption O. The contribution ratio B indicates the degree of contribution of an active sensor node to coverage. B is derived as

Next, we define the redundancy ratio U as the averaged extra degree of coverage per patch for achieving k-coverage. The redundancy ratio is derived as

Finally, the energy consumption O is derived using our energy model described in Section 5.3. We take into account state-dependent energy consumption and energy consumed in message transmission and reception. We should note here that the overhead related to management of location information is not considered in the evaluations. First, we assume that a sink obtains identifiers and location-related information from all sensor nodes in advance. We further assume that both of CCP and our proposal adopt the same localization technique. Messages sent from a sensor node contain its identifier, whose size is small enough. As a result, the amount of overhead regarding management of location information is almost the same among CCP and our proposal, and the difference is negligible. Influences of inaccuracy in location information are taken into account in the energy consumption O, since inaccurate location information affects states of sensor nodes and the amount of message transmission.
5.6. Basic Evaluation
First we compare our proposal with CCP under the ideal environment, where there is neither localization error nor shape error. In Figure 5, the x-axis indicates the width and height of a subarea, that is,

Comparison without errors.
Under the ideal environment, sensor nodes can accurately estimate the degree of coverage inside sensing areas of themselves. Figure 5(b) shows that the percentage of active sensor nodes with CCP increases almost in proportional to the required coverage. In spite of a deterministic and geometric algorithm of CCP, the redundancy ratio is higher than 2 and up to 3.2 as shown in Figure 5(c). Even if an uncovered area inside a sensing area of a sensor node is small, a sensor node becomes in active state to cover the area. This results in the redundant coverage of the other area which is already covered. However, such redundancy is unavoidable for the irregularity of deployment of sensor nodes and the shape of sensing area.
Compared to CCP, the sensing ratio with our proposal is lower especially when the size of subarea is large as shown in Figure 5(a). Our proposal adopts the metaheuristic algorithm, that is, attractor selection model, to find a solution. As such, the size of search space affects the optimality of the found solution. In case of the global activity-based control, the number of combinations of state of sensor node is as large as 210000. In addition, a state of a sensor node does not influence others very much. Therefore, our proposal often falls into local optimal. However, as the sizes of subareas decreases, the sensing ratio of our proposal approaches 1. When the size of subarea is smaller, the number of sensor nodes per subarea decreases. As a result, the size of solution space becomes smaller and there appears stronger interdependency among state of sensor nodes. In other word, with the smaller size of subarea, sensor nodes can find better solution, which has higher sensing ratio and less redundancy ratio. In general, when a sensor node selects the active state, it increases both of the sensing ratio and the redundancy ratio. When the sensing ratio is low, an increase in the sensing ratio increases the activity more than the decrease caused by increased redundancy ratio. It is a reason that there are more active sensor nodes with smaller subareas in Figure 5(b) for
Regarding the contribution ratio, a smaller subarea leads to the higher contribution ratio. As shown in Figure 5(d), when k is 2 or 3, our proposal can achieve higher contribution ratio than CCP in any size of subarea. On the contrary, when k is 1, CCP achieves higher contribution ratio than our proposal in almost all size of subarea. When
5.7. Influence of Localization Error
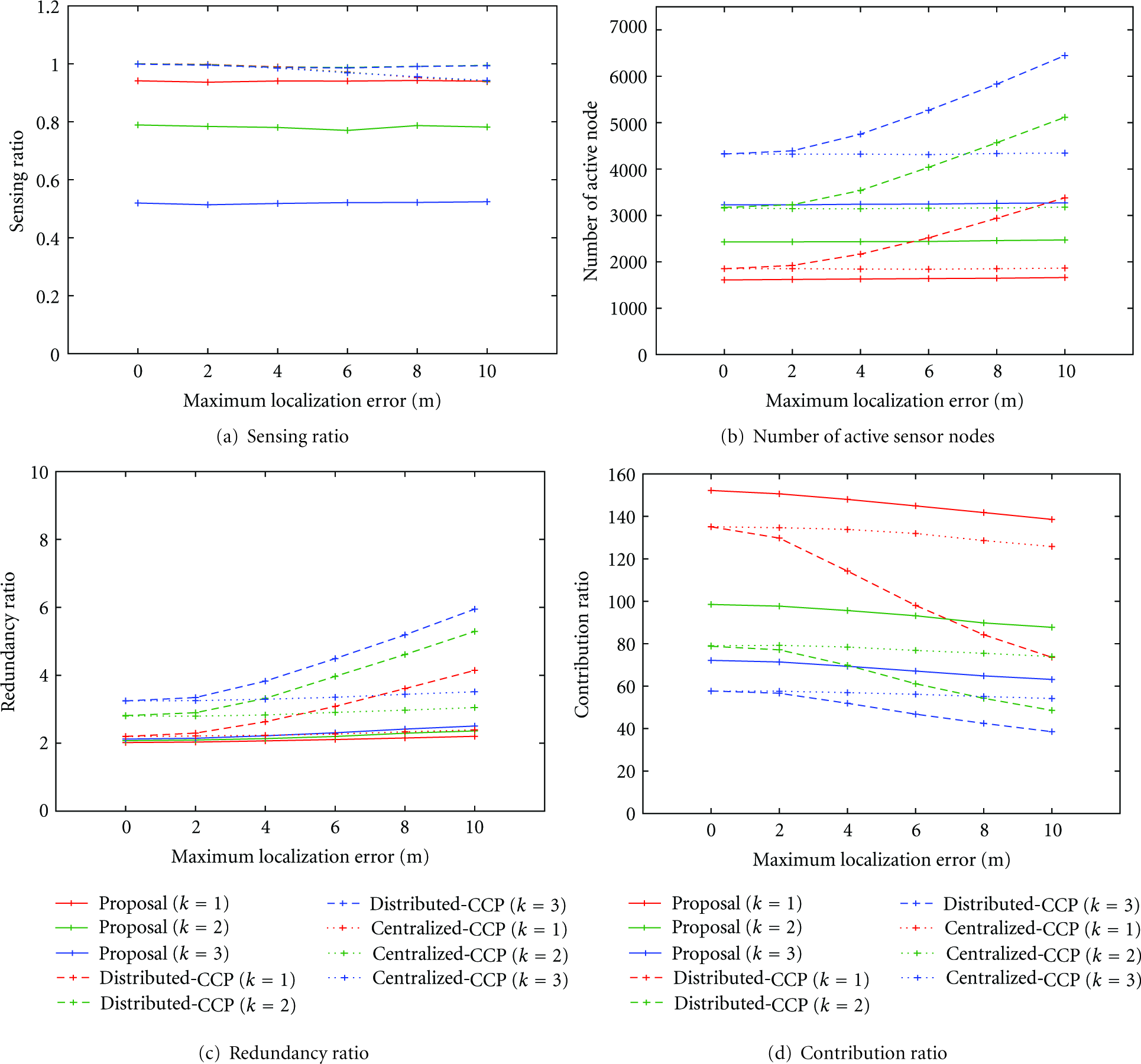
In this section, we compare CCP and two variants of our proposal, that is, the global activity-based control and the area activity-based control whose subarea size is set at

Influence of localization error (global activity).
Influence of localization error (area activity).
Figure 6(a) shows the average sensing ratio S of the global activity-based control against the different degree u of localization error. In the figure, it is obvious that neither our proposal nor distributed-CCP is affected by localization error. In our proposal, a sink calculates the activity from collected sensing data. Since the effect of localization error is averaged over the whole region, the derived activity is not seriously affected by localization error. On the contrary, distributed-CCP uses geometric and deterministic algorithm, and as such state selection heavily depends on the accuracy of location information. Nevertheless, distributed-CCP keeps the high sensing ratio. The reason is that localization error and wrong state selection are compensated by the increased number of active sensor nodes and the higher redundancy as shown in Figures 6(b) and 6(c).
In CCP, localization errors contribute to both of increase and decrease in the number of active nodes. When a sensor node wrongly considers that a neighbor sensor node is far and there is no overlap between their sensing areas by localization error, it is likely to become active to monitor intersections which seem to be uncovered. At the same time, localization error makes a sensor node consider a further neighbor to be located close. Consequently, the affected node is likely to move to the sleep state. In the case of the distributed-CCP, a decision of a sensor node is affected only by neighbor sensor nodes within its communication range. From results of the distributed-CCP in Figure 6(b), localization error results in the increase more than the decrease. On the contrary, in the case of the centralized-CCP, a sensor node is further affected by localization error of a sensor node whose actual location is out of its communication range. The actual sensing area of such a distant sensor node does not overlap with the sensing area of the sensor node. Therefore, even if the distant sensor node is considered to be located further by localization error, it does not influence a decision of the sensor node at all. However, when the sensor node considers the distant sensor node is located closer to itself by localization error, it would move to the sleep state. As a result, the number of active sensor nodes becomes smaller than that of the distributed-CCP. Since the increase and decrease are occasionally balanced for uniformly random distribution of sensor nodes, the number of active sensor node becomes constant against localization errors.
As a result, the redundancy ratio with the centralized-CCP becomes smaller than the distributed-CCP (Figure 6(c)), and the centralized-CCP is more prone to the localization error than the distributed-CCP in terms of the sensing ratio (Figure 6(a)). Similarly, in our proposal, the derived activity is not also seriously affected by localization error by averaging error over the whole region, we can achieve the similar performance without increasing the number of active sensor nodes.
To evaluate the efficiency of coverage control, Figure 6(d) shows the contribution ratio B against the different degree of localization error. As can be expected from Figure 6(b), the contribution ratio of distributed-CCP decreases as the maximum localization error increases. For example, when an application requires 1-coverage (
However, the sensing ratio gradually decreases as the localization error increases. In comparison with the global activity-based control, the redundancy ratio is lower and the contribution ratio is higher with the area activity-based control (compare Figure 6(c) with Figure 7(c), Figure 6(d) with Figure 7(d)). It implies that an uncovered patch has less chance to be covered by a nearby active sensor node than with the global activity-based control. However, even if there is the high localization error, the area activity-based control can achieve the sensing ratio similar to or better than the global activity-based control.
From the above results, we can conclude that our proposals are more robust than distributed-CCP. Although centralized-CCP exhibits the similar robustness in the number of active nodes to our proposal due to the center-point control, our proposal is superior to centralized-CCP. Further discussions will be given in Section 6. Although distributed-CCP can maintain sensing ratio close to one against localization error, the number of active sensor nodes considerably increases. It depletes batteries and shortens the lifetime of a sensor network. Although sensing ratio is slightly lower with the area activity-based control than distributed-CCP even without localization error, the number of active sensor nodes do not change much, and we can expect the similar lifetime under the influence of localization error, which is quite common in the actual environment. When we consider such applications that do not always require sensing ratio of 100%, for example, precision agriculture and environmental monitoring, our proposal is more practical and useful than distributed-CCP.
5.8. Influence of Shape Error
Figure 8 evaluates the influence of shape error on the sensing ratio under the condition without localization error. As shown in the figure, the sensing ratio decreases independently of protocols, and their order does not change against the degree of irregularity. When there are shape errors, a patch considered to be inside the ideal and circular sensing area of an active sensor node is not always inside the actual and irregular sensing area. It leads to decreasing the sensing ratio. On the other hand, even if a patch is covered by a distant active sensor node whose actual sensing area contains the patch, it does not contribute to the sensing ratio calculated at a sensor node or a sink. It is because another node whose circular sensing area contains the patch decides to become in active state for insufficient coverage from a viewpoint of the sensor node and the patch becomes covered anyway. As a result, the shape error causes deterioration of sensing ratio.
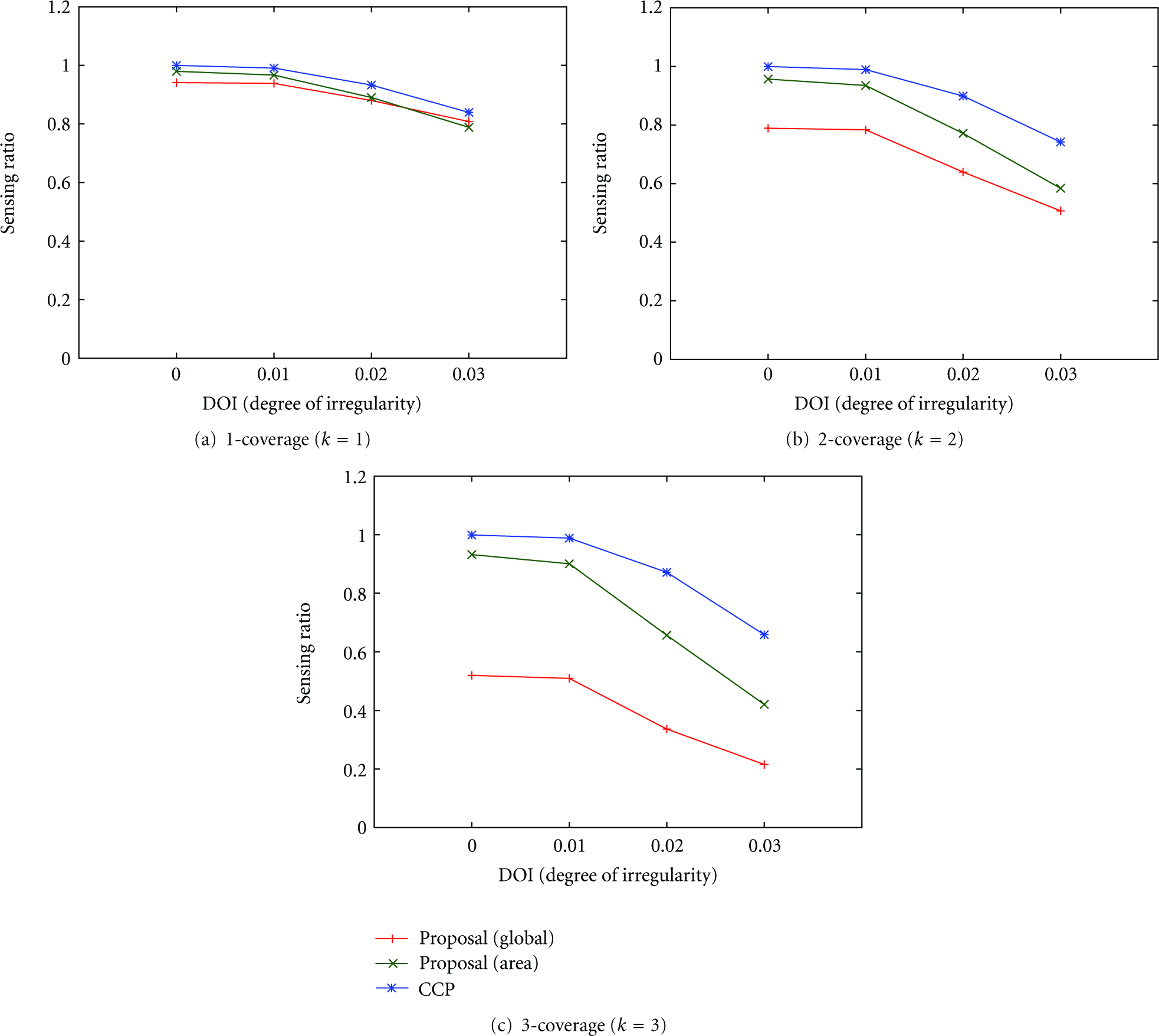
Influence of shape error.
5.9. Evaluation of Energy Consumption
Finally, we evaluate energy consumption of our proposal and CCP. Figure 9 shows the averaged energy consumption per sensor node over 10 simulation runs against time for cases with and without localization error. Results of our proposal with and without localization error overlap with each other. This is because the number of active sensor nodes does not increase even with high localization error. A reason why the global activity-based control requires more energy than the area activity-based control for
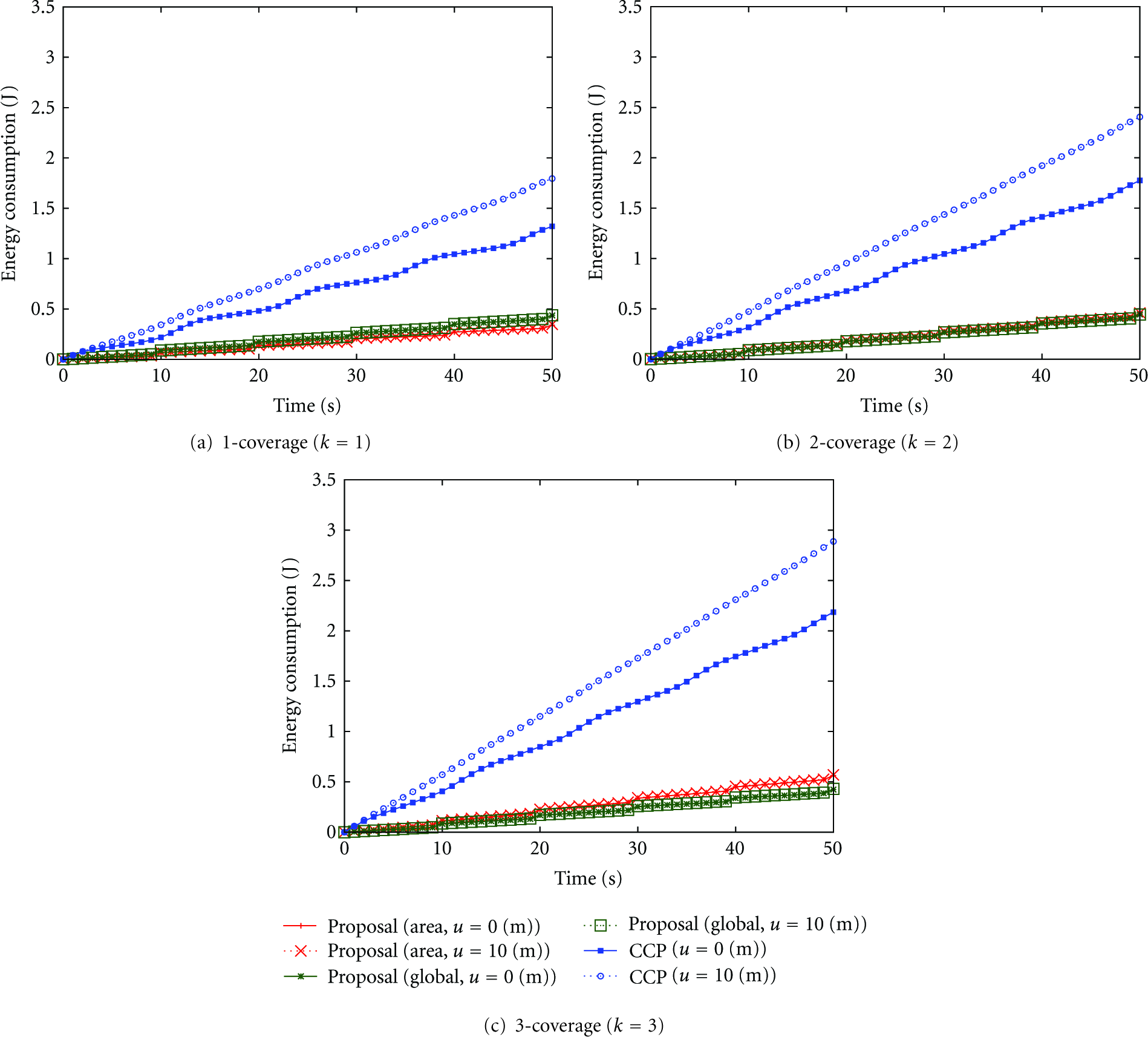
Energy consumption.
Independently of the required coverage, it is apparent that our proposal consumes only between one-sixth and one-third of energy of CCP. The primary reason lies in less communication overhead of our proposal. Our proposal does not involve any additional communication among sensor nodes except for dissemination of activity. Therefore, sensor nodes can turn off transceiver modules except for data gathering and feedback dissemination and hold down energy consumption. On the other hand, CCP consumes energy in the listen mode of transceivers for information exchanges and state transitions. To evaluate the
6. Discussion
As seen in the results of centralized-CCP, center-point control leads to the robustness against localization error in the number of active sensor nodes. This results in the higher contribution ratio of the centralized-CCP than that of the distributed-CCP. Since our proposal adopts a kind of center-point control, where the activity, expressing the degree of coverage of the whole region or each subarea, is derived at a sink, they have the similar robustness. However, the center-point control alone is not sufficient to explain the reason of higher performance of our proposal than the CCP-based control schemes. A reason that our proposal can outperform the CCP-based schemes by the smaller number of active sensor nodes is in the bio-inspired algorithm. CCP relies on the deterministic and rigorous algorithm, aiming at the perfect coverage. As a result, many sensor nodes are forced to be active to fully fill out the region with active nodes. For example, a sensor node decides to become the active state to cover a small void, whose size is less than 1/10 of the sensing area. On the contrary, the bio-inspired algorithm is more flexible and relaxed. A single scalar, called the activity, is used to express the degree of coverage of the whole region or each subarea in a rough and vague manner. In addition, each sensor node decides its state stochastically and autonomously. As such, the number of active sensor nodes is efficiently reduced while leaving some, voids are uncovered with our proposal, and the sensing ratio is sacrificed to some extent.
7. Conclusion
In this paper, by adopting the attractor selection model of adaptive behavior of biological systems, we proposed an error-tolerant and energy-efficient coverage control and showed our proposal can achieve the sensing ratio S of up to 0.98 and prolong the life time of the network up to 6 fold by comparison with CCP.
As future research, we plan to conduct more realistic evaluation, where radio communication interferes with each other. CCP will suffer from collisions among control messages and the performance will deteriorate. On the contrary, feedback dissemination will be affected by loss of messages. As a result, some sensor nodes cannot update the activity, and the performance will deteriorate as well. We also need to investigate the influence of parameters of the attractor selection model. Biological models are insensitive to parameter settings in general and it is one of benefits to be inspired by biological systems. We are going to evaluate our proposals with other simulation scenarios.
Footnotes
Acknowledgments
This research was supported in part by Early-concept Grants for Exploratory Research on New-generation Network and International Collaborative Research Grant of the National Institute of Information and Communications Technology, Japan.