
Abstract
Multi-target tracking is a representative real-time application of sensor networks as it exhibits different aspects of sensor networks such as event detection, sensor information fusion, multihop communication, sensor management, and real-time decision making. The task of tracking multiple objects in a wireless sensor network is challenging due to constraints on a sensor node such as short communication and sensing ranges, a limited amount of memory, and limited computational power. In addition, since a sensor network surveillance system needs to operate autonomously without human operators, it requires an autonomous real-time tracking algorithm which can track an unknown number of targets. In this paper, we develop a scalable real-time multi-target tracking algorithm that is autonomous and robust against transmission failures, communication delays, and sensor localization error. The algorithm is based on a rigorous probabilistic model and an approximation scheme for the optimal Bayesian filter. In particular, an extensive simulation study shows that there is no performance loss up to an average localization error of 0.7 times the separation between sensors and the algorithm tolerates up to 50% lost-to-total packet ratio and 90% delayed-to-total packet ratio. The proposed algorithm has been successfully applied to real-time multi-target tracking problems using wireless sensor networks.
1. Introduction
In wireless sensor networks, many inexpensive and small sensor-rich devices are deployed to monitor and control our environment [1, 2]. Each device, called a sensor node, is capable of sensing, computation, and communication. Sensor nodes form a wireless adhoc network for communication. The limited supply of power and other constraints, such as manufacturing costs and limited package sizes, limit the capabilities of each sensor node. For example, a typical sensor node has short communication and sensing ranges, a limited amount of memory, and limited computational power. However, the abundant number of spatially spread sensors will enable us to monitor changes in our environment accurately despite the inaccuracy of each sensor node.
Multi-target tracking is a representative real-time application of sensor networks as it exhibits different aspects of sensor networks such as event detection, sensor information fusion, communication, sensor management, and real-time decision making. The applications of tracking using sensor networks include surveillance, search and rescue, disaster response system, pursuit evasion games [3], distributed control [4], spatiotemporal data collection, and other location-based services [5]. Two well-known multi-target tracking algorithms are joint probabilistic data association (JPDA) filter [6] and multiple hypothesis tracker (MHT) [7, 8]. But, considering the limited computational power and memory space of each sensor node, they are not feasible for sensor networks due to their exponential time and space complexities. As a result, many new tracking algorithms for sensor networks have been developed recently.
Many target tracking algorithms developed for sensor networks are designed for single-target tracking [10–21] and some of these algorithms are applied to track multiple targets using classification [10–12] or heuristics, such as the nearest-neighbor filter (NNF) used in [13]. The NNF [6] processes the new measurements in some predefined order and associates each with the target whose predicted position is closest, thereby selecting a single association. Although effective under benign conditions, the NNF gives order-dependent results and breaks down under more difficult circumstances. Some algorithms are designed for multi-target tracking [22–24] where the complexity of the data association problem inherent to multi-target tracking is avoided by classification [22, 23] or heuristics [22, 24]. The associations between measurements and targets are not generally known in multi-target tracking. The data association problem is to determine which measurements were generated by which targets. When tracking targets of a similar type or when reliable classification information is not available, the classification-based tracking algorithm behaves as the NNF. Considering the fact that the complexity of the data association problem is NP-hard [25, 26], a heuristic approach breaks down under difficult circumstances. Furthermore, the measurement inconsistencies common in sensor networks, such as false alarms and missing measurements due to missing detection or packet loss, are not fully addressed in many algorithms. On the contrary, the multi-target tracking algorithm developed in this paper is based on a rigorous probabilistic model and based on a true approximation scheme for the optimal Bayesian filter.
We can categorize a target tracking algorithm for sensor networks by its computational structure: centralized [11, 14, 15], hierarchical [16, 17], or distributed [10, 12, 13, 18–24]. Since each sensor can only sense a small region around it, and its measurements are noisy and inconsistent, measurements only from a single sensor and its neighboring sensors are not sufficient to initiate, maintain, disambiguate, and terminate tracks of multiple targets. It requires measurements from distant sensors to initiate, maintain, disambiguate, and terminate tracks of multiple targets. But considering the communication load and delay when exchanging measurements between distant sensors, a completely distributed approach is not feasible for real-time applications. On the other hand, a completely centralized approach is not robust and scalable. Hence, we consider a hierarchical architecture to minimize the communication load and delay while being robust and scalable. In fact, our algorithm has been successfully demonstrated using a large-scale outdoor sensor network deployment and used to solve a real-time control problem [27].
Markov chain Monte Carlo data association (MCMCDA) presented in [9] can track an unknown number of targets in real-time and is an approximation to the optimal Bayesian filter. It has been shown that MCMCDA is computationally efficient compared to the multiple hypothesis tracker (MHT) [7] and outperforms MHT with heuristics (i.e., pruning, gating, clustering, N-scan-back logic and k-best hypotheses) under extreme conditions, such as a large number of targets in a dense environment, low detection probabilities, and high false alarm rates [9]. MCMCDA is suitable for sensor networks since it can autonomously initiate and terminate tracks. Since transmission failure is another form of missing observation, MCMCDA is robust against transmission failures. MCMCDA performs data association based on both current and past observations, so delayed observations, that is, out-of-sequence measurements, can be easily combined with previously received observations to improve the accuracy of estimates. Furthermore, MCMCDA requires less memory as it maintains only the current hypothesis and the hypothesis with the highest posterior. It does not require the enumeration of all or some of hypotheses as in [7, 28]. In this paper, we extend the MCMCDA algorithm to sensor networks in a hierarchical manner so that the algorithm becomes scalable. To our knowledge, the algorithm presented in this paper is the first general real-time scalable multi-target-tracking algorithm for sensor networks which can systematically track an unknown number of targets in the presence of false alarms and missing observations and is robust against transmission failures, communication delays, and sensor localization error.
We consider a simple shortest-path routing scheme on a sensor network. The transmission failures and communication delays of the network are characterized probabilistically. We assume the availability of a small number of special nodes, supernodes, that are more capable than regular nodes in terms of computational power and communication range. Examples of a supernode include high-bandwidth sensor nodes such as iMote and BTnode [29], gateway nodes such as Stargate, Intrinsyc Cerfcube, and PC104 [29], and the Tier-2 nodes used in the experiment of [27]. Each node is assigned to its nearest supernode and nodes are grouped by supernodes. We call the group of sensor nodes formed around a supernode a “tracking group”. When a node detects a possible target, it communicates with its neighbors and observations from the neighboring sensors are fused and sent to its supernode. Each supernode receives the fused observations from its tracking group and executes the tracking algorithm. Each supernode communicates with neighboring supernodes when a target moves away from its range. Lastly, the tracks estimated by supernodes are combined hierarchically. Although a specific sensor network model is used for the performance evaluation, the algorithm is applicable for different routing algorithms and sensor models, for example, distributed air traffic control [30].
As mentioned earlier, the algorithm presented in this paper is used in [27]. Although the overview of the algorithm is described in [27], the focus of [27] is to describe a new control system architecture using sensor networks and an outdoor experiment. In this paper, we describe the algorithm in detail and study the characteristics of the algorithm under different conditions in simulation. The paper also includes experimental results from an indoor experiment with 45 sensors and ourdoor experiments described in [27]. While a wireless sensor network generates noisy, inconsistent, and bursty measurements, the algorithm described in this paper successfully estimated the number of targets and tracks of targets in real-time.
The remainder of this paper is structured as follows. The sensor network model assumed in this paper is described in Section 2. In Section 3, the multi-target tracking problem, the MCMCDA algorithm, and the hierarchical extension of MCMCDA are described. The simulation and experiment results are given in Sections 4 and 5. Frequently appearing symbols are listed in Abbreviations section.
2. Sensor Network Model
Let
Let


The single target position estimation error as a function of
A transmission along the edge

We assume each node has the same probability

When the network is heavily loaded, the independence assumptions on transmission failure and communication delay may not hold. However, the model is realistic under the moderate conditions, and we have chosen it for its simplicity.
3. Multi-Target Tracking
3.1. Problem Formulation
Let
Let


The main objective of the multi-target tracking problem is to estimate K,
Let
An example of a partition is shown in Figure 2. Here, K is the number of tracks for the given partition
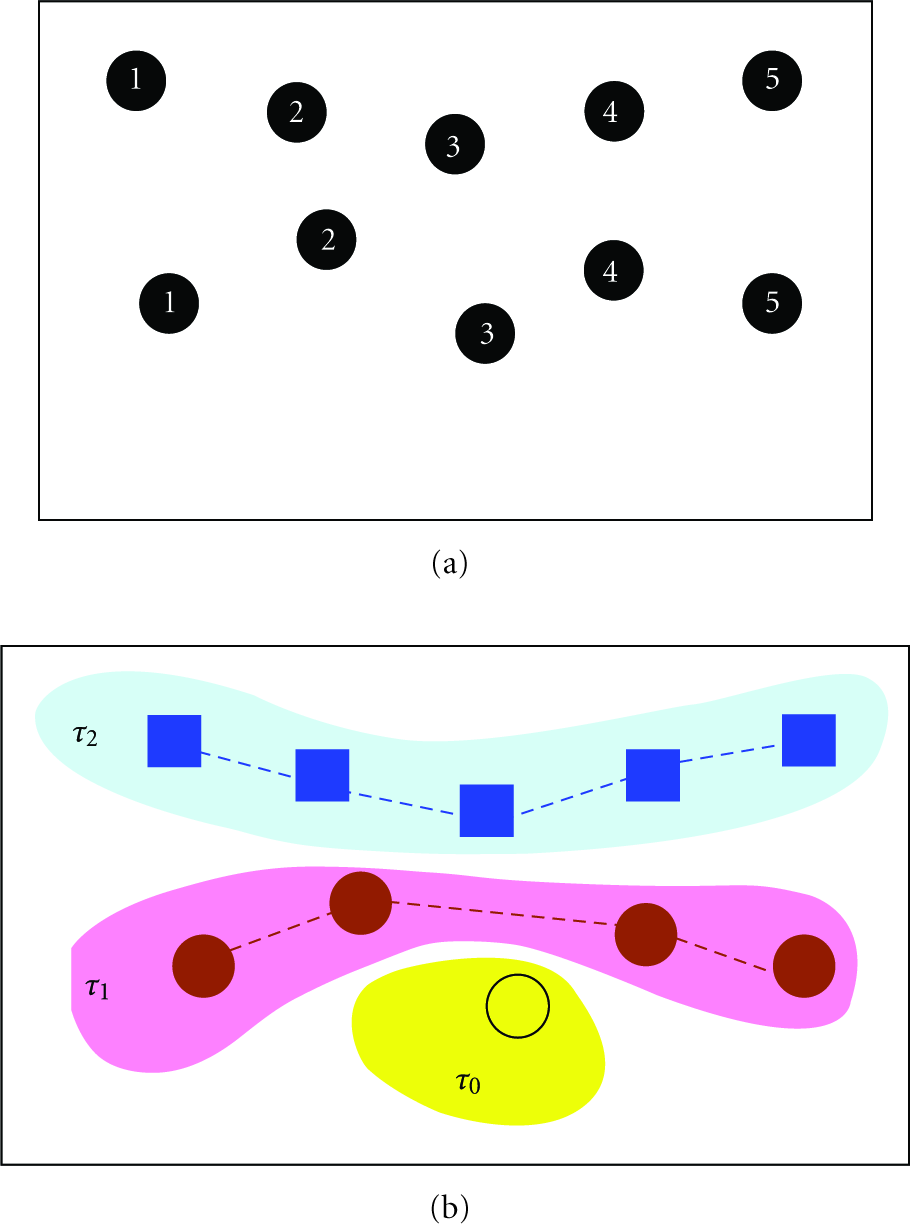
(a) An example of observations Y (each circle represents an observation and numbers represent observation times). (b) An example of a partition ω of Y.
Let

There are two major approaches to solve the multi-target-tracking problem [9]: maximum a posteriori (MAP) and Bayesian approaches. The MAP approach finds a partition of observations such that
3.2. Markov Chain Monte Carlo Data Association Algorithm
In this section, we explain an MCMC sampler designed to solve the multi-target-tracking problem. MCMC is a general method to generate samples from a distribution π by constructing a Markov chain ℳ whose states are ω and whose stationary distribution is

The MCMC data association (MCMCDA) algorithm is described in Algorithm 1. MCMCDA is an MCMC algorithm whose state space is
propose sample U from Unif[

A graphical illustration of MCMCDA moves. Associations are indicated by dotted lines, and hollow circles are false alarms.
In addition, the memory requirement of the algorithm is at its bare minimum. Instead of keeping all
The Markov chain designed by Algorithm 1 is irreducible and aperiodic [9]. In addition, the transitions described in Algorithm 1 satisfy the detailed balance condition since it uses the Metropolis-Hastings kernel (8). Hence, by the ergodic theorem, the chain converges to its stationary distribution [33].
3.3. Online Hierarchical MCMCDA
At each supernode, we implement the online MCMCDA algorithm with a sliding window of size
Since each supernode maintains its own set of tracks, there can be multiple tracks of a single object maintained by different supernodes. To make the algorithm fully hierarchical, we do track-level data association to combine tracks from different supernodes. Let
4. Simulation Results
For simulations below, we consider the surveillance over a rectangular region on a plane,


Since the number of targets K is not fixed, it is difficult to measure the performance of an algorithm using a standard criterion such as the mean square error. Hence, we use two separate metrics to measure performance: the estimation error in the number of targets


We first evaluate the effect of the sensing range and empirically find that there is an optimal value at which the estimation error is minimized. Then we illustrate the robustness of our algorithm against sensor localization error, transmission failures, and communication delays. We then give an example of surveillance using wireless sensor networks and demonstrate how the hierarchical MCMCDA algorithm works.
4.1. Sensing Range
When localizing a single target, we can minimize the localization error by allowing more sensors to collaborate, which is equivalent to increasing

(a) The estimation error in the number of targets
4.2. Sensor Localization Error
The localization of sensor nodes in an adhoc wireless sensor network, without expensive hardware such as the global positioning system (GPS), is a challenging problem [34]. Hence, an algorithm which utilizes sensor positions needs to be robust against the sensor localization error. Suppose that the true position of sensor node i is

(a) The estimation error in the number of targets

(a) Ratio between the number of lost packets and the number of total packets. (b) The estimation error in the number of targets

(a) Ratio between the number of delayed packets and the number of total packets. (b) The estimation error in the number of targets
4.3. Transmission Failures
To assess the effects of transmission failures alone, we assume that there are no delayed observations, no false alarms, and no missing detections. A single supernode is placed at the center. As mentioned earlier, transmission failures are missing observations and Figure 6(a) shows the ratio between the number of lost packets and the number of total packets as a function of the transmission failure rate
4.4. Communication Delays
To assess the effects of communication delays alone, we assume that there are no transmission failures, no false alarms, and no missing observations. Figure 7(a) shows the ratio between the number of delayed packets and the number of total packets as a function of the communication delay rate
4.5. An Example of Surveillance with Sensor Networks
In this section, we give an example of surveillance with sensor networks. The surveillance region ℛ is divided into four quadrants and sensors in each quadrant form a tracking group, where a supernode is placed at the center of each quadrant. The scenario is shown in Figure 8(a). We used

(a) A scenario used in Section 4.5 (numbers are target appearance and disappearance times, initial positions are marked by circles). (b) Accumulated observations received by supernodes with delayed observations circled. (c) Tracks estimated locally by supernodes superimposed. (d) Tracks estimated by the track-level data association step.
5. Experiments
5.1. Indoor Experiments
As a proof of concept, we implemented a scaled down tracking scenario on a 9-by-5 sensor network testbed (see Figure 9). The tracking scenario was that of two crossing targets moving at constant speed. Due to the small physical size of the network, there is a single supernode and hence no track-level data association. Also, to retain enough distinct data points to form meaningful tracks, we did not aggregate sensor readings as in (2).

(a) A mica2dot sensor node (attached to an eMote). (b) The sensor network testbed used in experiments.
The sensor node platform used for our experiment was the mica2dot [35], an embedded, low-power, wireless platform running TinyOS [36] which had a 4 MHz ATMega128 processor with 4 kB of RAM and 128 kB of program memory, and a CC1000 radio that provided up to 38.4 kbps transmission rate. Each node was equipped with a Honeywell HMC1002 2-axis magnetometer to sense moving targets. See Figure 9(a). Our moving targets were modified RC-cars called COTSBOTs [37], which had a 1-inch (2.54 cm) diameter, 0.125-inch (3.175 mm) thick neodymium magnet strapped to the top of the car.
The sensor nodes trigger a detection event when

We used the minimum-transmission-routing protocol [39] to route the sensor readings back to the supernode for calculations. This algorithm has better end-to-end reliability than shortest path routing, ensuring fewer packets are dropped from transmission errors. We performed multiple experiments with different target trajectories and velocities, all with comparable performance. The result from one of these experiments is shown in Figure 11 and snapshots are shown in Figure 10. The experiments showed that the algorithm performed well in the presence of false alarms and missing observations.
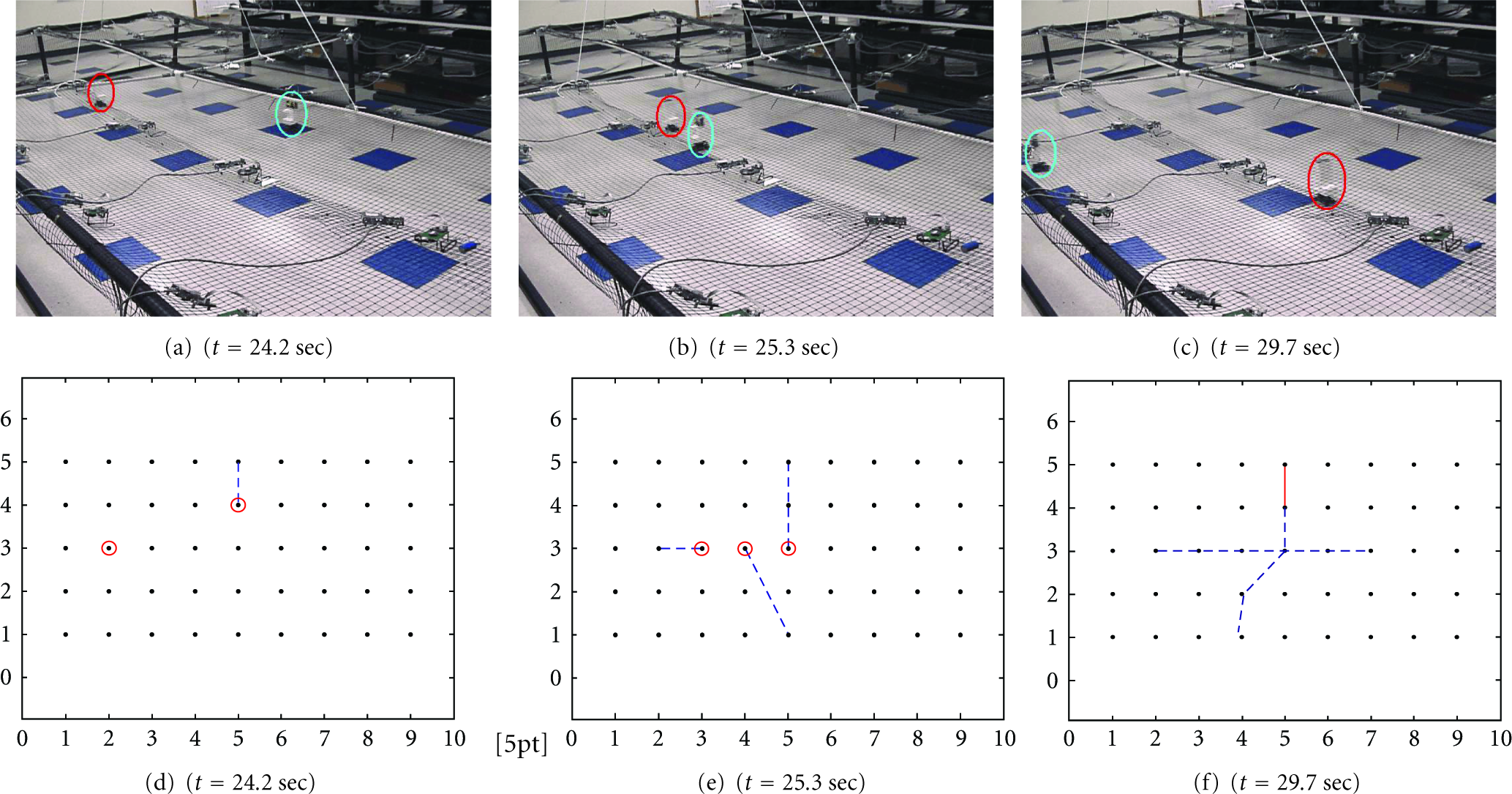
(a)–(c) Snapshots from the experiment of crossing tracks, proceeding left to right. We are looking at the grid of nodes from the bottom right corner. (d)–(f) Corresponding tracks found by the MCMCDA algorithm at each time step. Reporting sensor nodes are circled in red, postulated tracks are represented by dashed lines, while established tracks are represented by red solid lines. Note that the algorithm makes a bad association at

(a) Trajectories of targets from the experiment. (b) Estimated tracks from the algorithm with observations (circles).
5.2. Outdoor Experiments
In this section, we present an outdoor demonstration described in [27] which is based on the proposed hierarchical multi-target-tracking algorithm for solving the multi-target-tracking problem. In addition to outdoor experiments shown here, the MCMCDA algorithm has been successfully applied to track vehicles, people, and ground robots in urban environments [40, 41]. The experiment was performed on a large-scale, long-term, outdoor sensor network testbed deployed on a short grass field at UC Berkeley's Richmond Field Station (see Figure 12). A total of 557 sensor nodes were deployed and 144 of these nodes were allotted for the tracking and PEG experiments. However, six out of the 144 nodes used in the experiment were not functioning on the day of the demo, reflecting the difficulties of deploying large-scale, outdoor systems. The sensor nodes were deployed at approximately 4- to 6-meter spacing in a

Hardware for the sensor nodes. (a) Triosensor node on a tripod. On top is the microphone, buzzer, solar panel, and user and reset buttons. On the sides are the windows for the passive infrared sensors. (b) A live picture from the two-target PEG experiment. The targets are circled.
In order to solve the multi-target tracking and pursuit-evasion game, we have proposed a hierarchical real-time control system LochNess which is shown in Figure 13. LochNess is composed of seven layers: the sensor networks, the multisensor fusion (MSF) module, the multi-target tracking (MTT) modules, the multi-track-fusion (MTF) module, the multi-agent coordination (MAC) module, the path planner module, and the path follower modules.
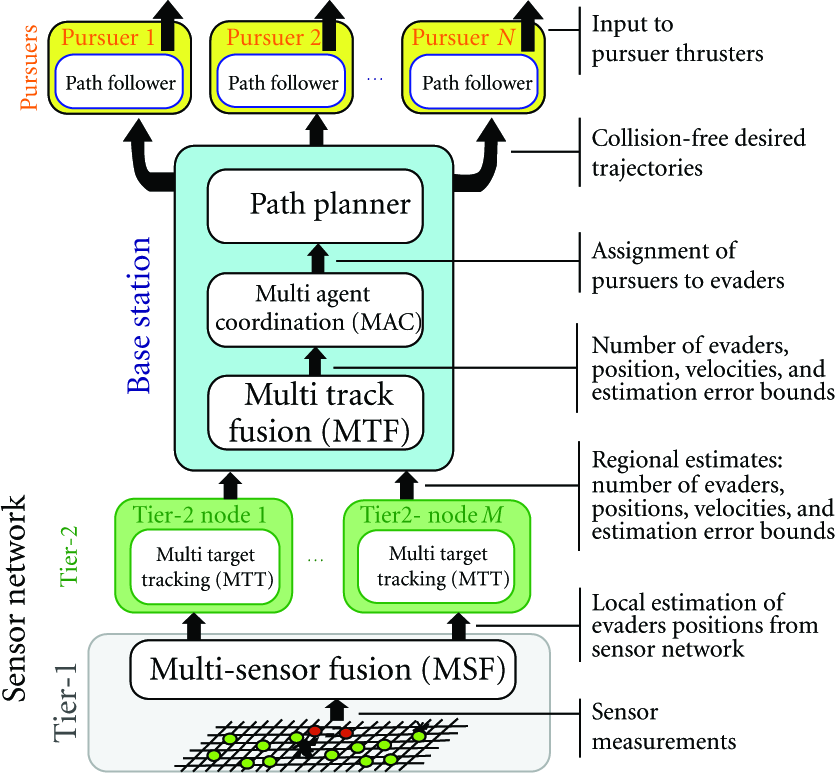
LochNess: a hierarchical real-time control system architecture using wireless sensor networks for multi-target tracking and multiagent coordination.
Under this architecture, sensors are spread over the surveillance region and form an adhoc network. The sensor network detects moving objects in the surveillance region and the MSF module converts the sensor measurements into target position estimates (or reports) using spatial correlation. We consider a hierarchical sensor network and the Tier-2 nodes are supernodes considered in this paper. Fused measurements are delievered to the Tier-2 nodes and the MTT module in each Tier-2 node estimates the number of evaders, the positions and velocities of the evaders, and the estimation error bounds. Each Tier-2 node communicates with its neighboring Tier-2 nodes when a target moves away from the region monitored by its tracking group. Lastly, the tracks estimated by the Tier-2 nodes are combined hierarchically by the MTF module at the base station.
The estimates computed by the MTF module are then used by the MAC module to estimate the expected capture times of all pursuer-evader pairs. Based on these estimates, the MAC module assigns one pursuer to one evader by solving the bottleneck assignment problem [42] such that the estimated time to capture the last evader is minimized. Once the assignments are determined, the path planner module computes a trajectory for each pursuer to capture its assigned evader in the least amount of time without colliding into other pursuers. Then, the base station transmits each trajectory to the path-following controller of the corresponding pursuer. The path-following controller modifies the pursuer's trajectory on the fly to avoid any obstacles sensed by the pursuer's on-board sensors. The MTT and MTF modules are based on the proposed hierarchical multi-target-tracking algorithm. For more detail about the description about the system used in the experiments, see [27].
We demonstrated the system on one, two, and three human targets, with targets entering the field at different times. In all three experiments, the tracking algorithm correctly estimated the number of targets and produced correct tracks. Furthermore, the algorithm correctly disambiguated crossing targets in the two-target and three-target experiments without classification labels on the targets. Figure 14(a) shows an example with three humans walking through the field. The three humans entered and exited the field around time 10 and 80, respectively. During the experiment, the algorithm correctly rejected false alarms and compensated for missing detections. There were many false alarms during the span of the experiments. Though not shown in the figures, the algorithm dynamically corrected previous track hypotheses as it received more sensor readings. A live picture of this experiment is shown in Figure 12(b). Figures 14(b) and 14(c) show the multi-target-tracking results with two persons walking through the field. Note that the MTT module is able to correctly disambiguate the presence of two targets (right panel of Figure 14(c)) using past measurements, despite the fact that the MSF module reports the detection of a single target (upper left panel of Figure 14(b)).

(a) Estimated tracks of targets at time 70 from the experiment with three people walking in the field. (upper left) Detection panel. Sensors are marked by small dots and detections are shown in large disks. (lower left) Fusion panel shows the fused likelihood. (right) Estimated tracks. (b) Estimated tracks of targets from the experiment with two people walking in the field before crossing. (c) Estimated tracks of targets from the experiment with two people walking in the field after crossing.
6. Conclusions
In this paper, a scalable hierarchical multi-target-tracking algorithm for wireless sensor networks is presented. The algorithm is based on the efficient MCMCDA algorithm, and it is suitable for autonomous real-time surveillance in sensor networks. This new multi-target-tracking algorithm can initiate and terminate tracks and requires a small amount of memory. The task of tracking is done hierarchically for real-time operation by forming a tracking group around a supernode and later combining tracks from different supernodes. In order to reduce the communication overhead, observations are first fused locally and then transmitted to its supernode. The algorithm is robust against sensor localization error and there is no performance loss up to the average localization error of 0.7 times the separation between sensors. The algorithm is also robust against transmission failures and communication delays. In particular, the algorithm tolerates up to 50% lost-to-total packet ratio and 90% delayed-to-total packet ratio. The extensive simulation and experimental results show that the algorithm is well suited for wireless sensor networks where transmission failures and communication delays are frequent.
Footnotes
Abbreviations
Acknowledgments
The author would like to thank Phoebus Chen for his contribution to the indoor experiment. This research was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science and Technology (No. 2010-0013354). A preliminary version of this work was presented at the IEEE International Conference on Robotics and Automation, 2005 [![]() ].
].