
Abstract
This paper considers the complexity of the Minimum Unit-Disk Cover (MUDC) problem. This problem has applications in extending the sensor network lifetime by selecting minimum number of nodes to cover each location in a geometric connected region of interest and putting the remaining nodes in power saving mode. MUDC is a restricted version of the well-studied Minimum Set Cover (MSC) problem where the sensing region of each node is a unit-disk and the monitored region is geometric connected, a well-adopted network model in many works of the literature. We first present the formal proof of its NP-completeness. Then we illustrate several related optimum problems under various coverage constraints and show their hardness results as a corollary. Furthermore, we propose an efficient algorithm for reducing MUDC to MSC which has many well-known algorithms for approximated solutions. Finally, we present a decentralized scalable algorithm with a guaranteed performance and a constant approximation factor algorithm if the maximum node density is fixed.
1. Introduction
The research in wireless ad hoc networks has rapidly grown in recent years due to their applications in civil and military domains. Combined with recent developments in micro-electro-mechanical systems and low-cost mass production, various small and low-power devices that integrate sensors with limited on-board processing and wireless communication capabilities begin to emerge. Hence, wireless networks with large numbers of sensors become possible and open up potential of many new applications, such as environment monitoring and surveillance [1].
With the available technology, the sensors are usually battery powered. Due to size and cost constraints, the energy available at each sensor is limited. Therefore, one of the important design considerations in sensor networks is to minimize energy consumption and prolong network lifetime. There is a significant amount of the literature addressing the issue of efficient energy management in generic wireless ad hoc networks from various perspectives, such as medium access control [2, 3], routing [4, 5], broadcasting [6, 7], multicasting [8, 9], and topology control [10, 11]. Of course, similar approaches have been also considered in wireless sensor networks [12–15].
An alternative approach commonly adopted in sensor networks is based on scheduling sensor activity so that some nodes may enter the power saving mode while the remaining active nodes can still provide continuous service [14, 16]. For instance, if all the sensor nodes simultaneously operate in active mode, an excessive amount of energy is wasted and the data collected is highly correlated and redundant. In addition, multiple packet collisions may occur when all the sensors in a certain region try to transmit as a result of a triggering event. Several research results [3, 16] illustrate that a mode of operation alternating active and inactive battery states has a significant reduced energy consumption.
However, such scheduling schemes may face new constraints about sensing coverage introduced by their distributed sensing applications [17]. For example, surveillance applications may require each location of monitored regions to be covered by at least one sensor, while many stronger environmental monitoring, such as military applications, require multiple sensors for fault-tolerant purpose. Besides, triangulation positioning-based tracking applications [18, 19] may require at least three sensors at any locations. Data sampling applications may require a given percentage of monitored regions to be covered.
Therefore, this paper considers the scheduling approach that extends the network lifetime by minimizing the number of active nodes while maintaining coverage constraints. As mentioned earlier, the advantage of this approach is that less packet collisions may occur since less spatially close sensors try to transmit highly correlated and redundant information as a result of a triggering event. Hence, the lifetime of each sensor cover may be extended.
We model a sensor network as a 2D geometric connected region monitored by a set of deployed sensor nodes with unit-disk sensing regions, a realistic assumption that is well adopted in many network models. The coverage constraint is that each location of the 2D region is covered by at least one active node. Note that optimum sensor cover problems may be solved by partitioning monitored regions into disjoint sectors [20, 21]. Here a sector is a maximum region covered by the same set of nodes. Hence the minimum sensor cover problem is transformed to the Minimum Set Cover (MSC) problem which is NP-complete [22] and has been studied extensively in the literature [23–26]. However, with the additional unit-disk sensing region and geometric connected monitored region restrictions, the problem considered here is only a restricted version of MSC, and, to the best of our knowledge, its complexity is still unknown. (That is, it is not trivial to transform each instance of MSC to an instance in the minimum sensor cover problem with unit-disk sensing regions over a connected monitored region in polynomial time.) Thus, we will answer this fundamental question and present the formal proof of its NP-completeness. Furthermore, we illustrate several related optimum problems under different coverage constraints and show their hardness results as a corollary.
Next, we propose the arc sampling algorithm which may effectively and efficiently reduce MUDC to MSC. Consequently, many well-known algorithms can be applied to find approximated solutions. In addition, we present a decentralized scalable algorithm with a guaranteed performance, and a constant approximation factor algorithm if the maximum node density is fixed. Finally, we illustrate simulation results to evaluate the proposed algorithms.
2. Related Work
2.1. Coverage Problems
Meguerdichian et al. [17] defined the coverage problems from several different application domains including deterministic, statistical, worst, and best cases. They also presented optimum polynomial time algorithms to evaluate paths that are the best and least monitored in the sensor network. The work in [27] further defined the exposure problem as measure of how well an object can be observed by the sensor network while it moves along an arbitrary path with an arbitrary velocity. A localized exposure-based coverage algorithm was proposed in [28] for finding the minimal exposure path between two points.
Furthermore, Gui and Mohapatra [29] considered the object tracking applications in which networks operate between surveillance state and tracking state. During surveillance state, they devised a set of metrics for quality of surveillance for detecting moving objects and quantify the trade-off between power conservation and quality. They also proposed an algorithm for each node to determine when to wake up or sleep during the tracking stage.
Tian and Georganas [30] developed a coverage-preserving scheduling scheme to reduce energy consumption by turning off some redundant nodes based on some eligibility rules. Carbunar et al. [31] proposed distributed algorithms for detecting and eliminating redundancy in a sensor network while preserving the network's coverage via Voronoi diagrams, even in cases of sensor failures or insertion of new sensors.
Huang and Tseng [32] considered the k-coverage problem to determine whether every point in the monitored region is covered by at least k nodes. They reduced this problem to the perimeter-coverage problem which determines the coverage degree of the perimeter of each node's sensing region and presented polynomial-time algorithms in the number of nodes.
In addition to coverage, connectivity also needs to be assured to make sensor networks successfully. It has been shown in [33] that if the communication range of sensors is at least twice as large as their sensing range, then full coverage of a convex region implies connectivity. Wang et al. [34] presented a Coverage Configuration Protocol (CCP) that allows the network to self-configure dynamically to achieve guaranteed degrees of coverage and connectivity.
2.2. Minimum Sensor Cover Problems
In [21], Funke et al. proposed the greedy sector cover algorithm which selects a node that covers the maximum number of uncovered sectors at each iteration step. That is, the problem is reduced to MSC and solved by the greedy algorithm. They proved that the well-known approximation factor
Gupta et al. [35] designed an
2.3. Related Optimum Problems
Fowler et al. [37] proved the
Marathe et al. [39] considered several basic optimization problems for unit-disk graphs with hierarchical structures. They presented a general technique to prove the hardness results of several problems. The hardness of these problems, including Box Cover and Circle Covering, was proved via satisfiability problems. The reduction strategy was to use some geometric structures to represent variables. Each clause is represented by a special structure that “glues” the corresponding structures of the variables in the clause.
There are several polynomial approximation algorithms [40–42] for the Geometric Disc Covering problem. Franceschetti et al. pointed out in [43] that the number of possible disk positions can be bounded if any disk that covers at least two points has two of these points on its border. Hence, by performing a search on a subset of the possible disk positions, the running time of these algorithms becomes polynomial and the solution sizes are guaranteed. They also gave a detailed comparison of these algorithms in [44].
3. Preliminaries
In this section, we define the Minimum Unit-Disk Cover (MUDC) problem that aims at finding the least number of nodes with unit-disk sensing regions to fully cover a designated connected region. We prove this problem is intractable; that is, it belongs to the NP-complete class.
Definition 1.
Consider a two-dimensional Euclidean metric space 𝔼, the unit-disk sensing region of a given node
Definition 2.
A two-dimensional finite region A is said to be unit-disk covered by a set U of nodes in a two-dimensional Euclidean metric space if
The objective is to find the minimum unit-disk cover (MUDC) of A. Note that the optimum problems discussed in this paper could be solved by their associated decision problems in polynomial time. Therefore, we discuss the decision version of MUDC instead, and it can be formally stated in the following.
Problem 3 (MUDC).
Given a set N of nodes in a two-dimensional Euclidean metric space 𝔼, a two-dimensional geometric connected finite region
For simplicity's sake, the geometry of an MUDC problem, that is, the region A and the set N of nodes, is denoted as
Thus, we will prove the following theorem.
Theorem 4.
MUDC is NP-complete.
The NP-completeness of MUDC will be proved by reduction from the Planar 3-SAT problem, which is known to be NP-complete [45].
Problem 5 (Planar 3-SAT, P3SAT).
Given a set of variables
That is, let B be a boolean formula in P3SAT with η clauses and
Inspired by Lichtenstein's NP-completeness proof of the Geometric Connected Dominating Set problem [45], MUDC
Each structure
Definition 6.
One calls a structure
Definition 7.
For a structure
if if
Furthermore, we call S well behaved if S is partially well behaved on N.
Note that, from the above definition, if
The NP-completeness proof of MUDC will proceed as follows.
Describe structures representing variables, edges, and clauses. These structures have the properties defined in Definitions 6 and 7. Describe how the above structures may be connected together to represent We claim that B is satisfiable if and only if
4. NP-Completeness Proof of MUDC
We first prove that
We continue the proof by reduction from the Planar 3-SAT problem. Let B be a boolean formula in P3SAT with η clauses and
4.1. Structures
We encode each variable by the structure, denoted as

The structure representing a variable.
Next, we may encode an edge by a strip-like structure, denoted as

The structure representing an edge.
It is not hard to prove the structures
Lemma 8.
The structures
Proof.
The lemma may be proved by induction. For the sake of brevity, the complete proof is given in Appendix A.
Each clause c may be represented by a structure, called an n
-way connector and denoted as
The geometry of the 2-way connector shown in Figure 3(a).

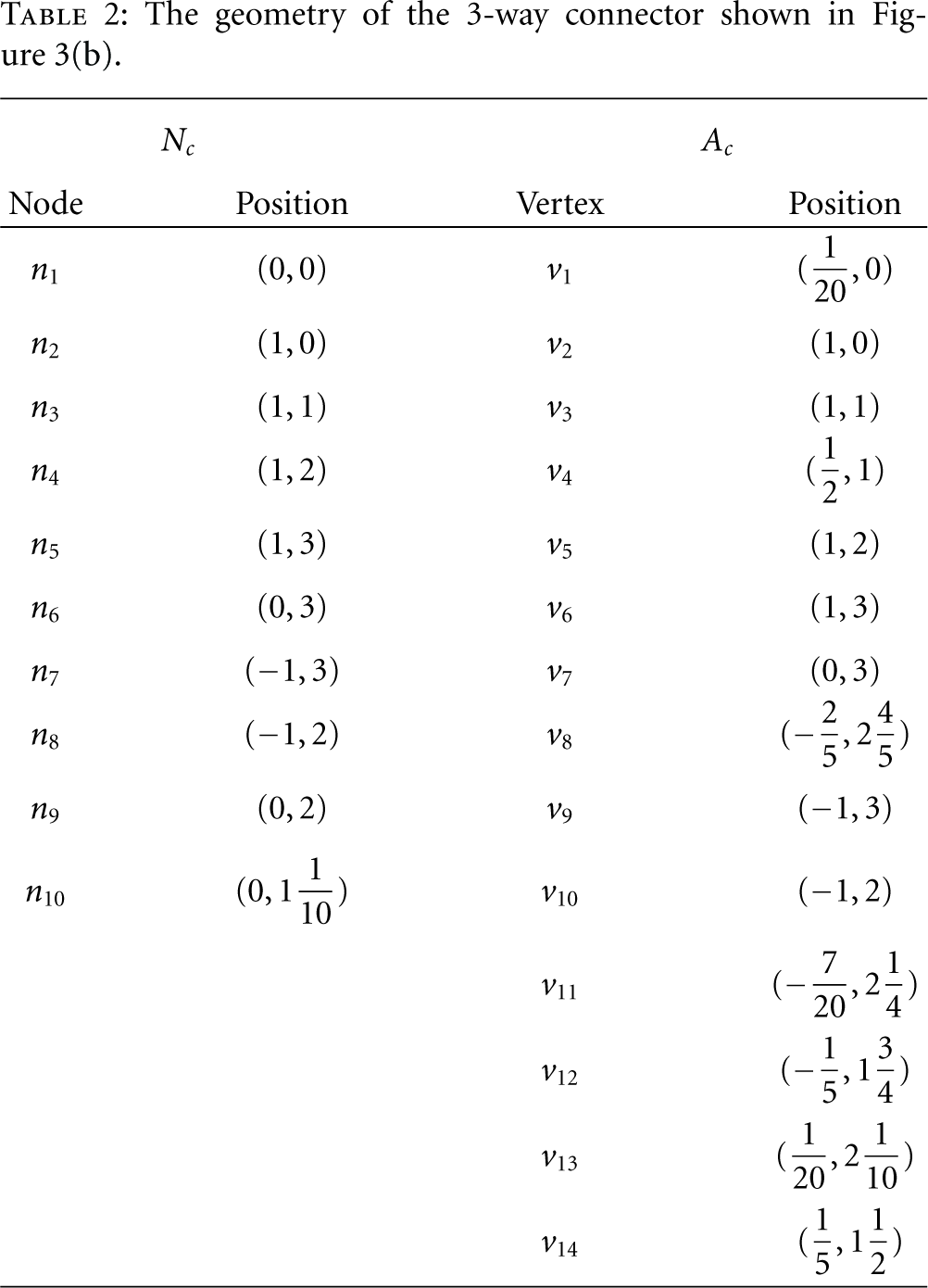
The geometry of the 3-way connector shown in Figure 3(b).

The structures representing clauses.

The labels of
Furthermore,
Each partition
The main reason why an n-way connector is constructed in this way is the following lemma.
Lemma 9.
Each n-way connector, If
Proof.
The idea is to examine each possible case of partition
Note that, from Lemma 9(ii), at least one header node must be active for covering
4.2. Composite Structures
Next, we illustrate how structures may be connected together to form a complex structure. As shown in Figure 5, two structures,

Connection patches for connecting two structures.
Lemma 10.
A connection patch can be unit-disk covered by the same polar nodes located at its vertices, for example,
In this at least one node from each connected port is active, (this is formally defined as precondition 27(i)); nonconnected port nodes do not cover any point, except the vertices, of the connection patches (this is formally defined as precondition 27(ii) which states whether a connection patch can be fully covered only depends on its connected port); nonconnected port nodes of one structure do not cover any region of the other structure, (this is formally defined as precondition 28(i)); the connected ports of one structure cannot cover any point, except their connection counterparts, of the other structure (this is formally defined as precondition 28(ii));
The formal definitions about the least interactive connection are also given in Appendix C.
A variable structure can use any two nearby nodes on the side of border as a port, for example,
We can define the composite structure in the following definition and derive several lemmas about the least interactive connection. For the sake of brevity, the complete proofs of these lemmas are given in Appendix E.
Definition 11.
The structures
Lemma 12.
Suppose
Lemma 13 (Connection Lemma).
Consider There exist an MUDC of
After describing the properties of the least interactive connection, we describe how these structures may be connected to encode
Figure 6 illustrates how edge structures are connected to a variable structure with connection patches. The edges may go up or down from the variable structure.

The structure represents a variable

The variable structure
With n-way connectors described above, we can transform an edge and its ends in
Since all structures are connected via
Note that, in addition to positions, polarities of ports must also match. (Precondition 26(ii) needs to be satisfied.) However, for example, it is possible that the polarities may not match when an edge structure is connected to a connector as shown in Figure 8(a).
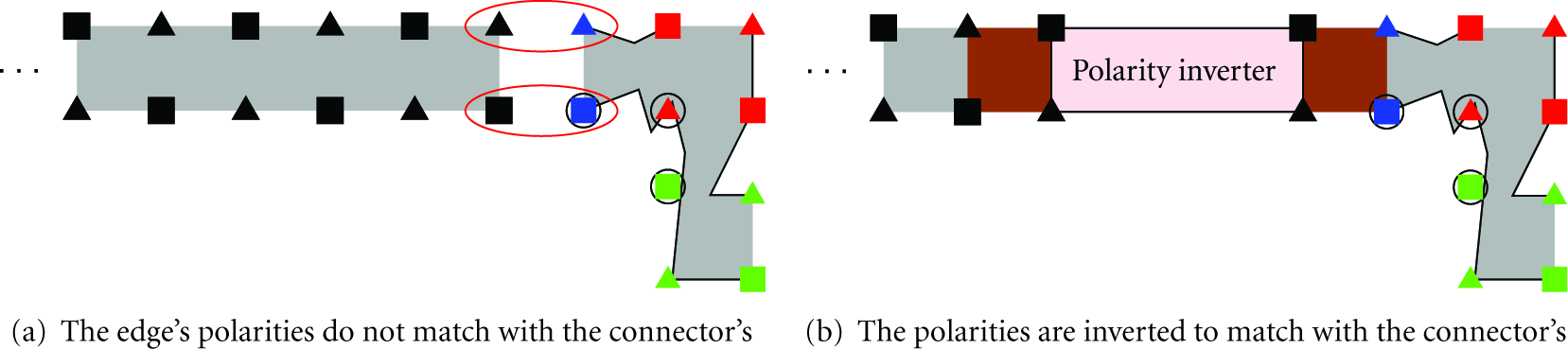
A polarity inverter structure may be needed to invert the polarity of the edge to connect the edge and 3-way connector.
Therefore, referring to Figure 9, we introduce a structure called a polarity inverter and denoted as

A structure for inverting the polarity of the edge. After distance 11, the polarities are inverted compared with a normal edge.
The distance between two nearby column-pairs of the main structure is
Of course, the structure
Lemma 14.
The structure
Definition 15.
For a given variable structure
For the ith variable, be the set of nodes in the corresponding variable structures be the set of nodes in all the associated edge structures of be the set of nodes in all the associated polarity inverters of be the set of nodes in all the associated n-way connectors of be the set of nodes in all the associated partitions of be the shaded region of be the union of the shaded region from all the associated edge structures of be the union of the shaded region from all the associated polarity inverters of be the union of the shaded region from all the associated n-way connectors of be the union of the shaded region from all the associated connection patches of
Definition 16.
Let
Note that

The territory,
Lemma 17.
If all the associated structures of the variable structure
Proof.
Since structures are least interactively connected, this lemma can be proved by Lemmas 8, 9(i), 14, and Connection Lemma. The fact that
After introducing the structures and their properties, we can define an equivalent MUDC problem with the geometry, MUDC(B), for a given boolean formula, B, in P3SAT by replacing the variables, clauses, and edges of the bipartite graph
is the set of nodes in all the variable structures, is the set of nodes in all the edge structures, is the set of nodes in all the polarity inverters, is the set of nodes in all the n-way connectors, is the union of the shaded region from all the variable structures, is the union of the shaded region from all the edge structures, is the union of the shaded region from all the polarity inverters, is the union of the shaded region from all the n-way connectors, is the union of the required connection patches.
Let
Claim B is satisfiable if and only if MUDC(B) has a UDC with cardinality K.
Note that the key to the backward direction of the proof is Lemma 17; that is, for a given variable, its territory is partially well behaved on the set of its pieces. Lemma 17 will be used to derive, that if MUDC(B) has a UDC with cardinality K, then, for each variable, half of its pieces with same polarity needs to be active to unit-disk cover its territory. Therefore, each variable could be assigned true or false based on the polarity of its active pieces.
4.3. Proof of the Claim
Proof.
⇒ For each
⇐ Let MUDC(B) have a UDC
From Lemmas 8, 9(i), and 14, we know that the cardinality of an MUDC of a variable structure, edge structure, n-way connector, or polarity inverter is half the number of the nodes in the structure. Since all structures in
From Lemma 17 and
5. Extensions of MUDC
MUDC can be easily extended to the following two more general cover problems, which require each location to be unit-disk covered by predefined number of nodes. These problems regard the quality of various services of sensor network applications such as surveillance, object tracking, and fault tolerance.
Problem 18 (Minimum Unit-Disk k-Cover, MUDKC).
Given a geometry
Problem 19 (Minimum Unit-Disk Multicover, MUDM).
Given a geometry
We may also consider connectivity and have the following problem.
Problem 20 (Minimum Connected Unit-Disk Cover, MCUDC).
Given a geometry
Furthermore, under many environmental data sampling applications, instead of full coverage, a predefined percentage of coverage is required for achieving energy efficiency and preciseness of sampling. The objective of the following problem is to find as few nodes as possible to achieve the coverage requirements.
Problem 21 (Minimum Unit-Disk Partial Cover, MUDPC).
Given a geometry
By the NP-completeness of MUDC, it is easy to derive the complexity of the above problems.
Corollary 22.
MUDKC, MUDM, MCUDC, and MUDPC are NP-complete.
Proof.
Note that every instance of MUDC can be viewed as an instance of MUDKC, MUDM, or MUDPC simply by letting
For the geometry, MUDC(B), described in the NP-completeness proof of MUDC, it is obvious that, for any UDC of
6. Arc Sampling Algorithm for Reducing MUDC to MSC
As stated earlier, MUDC may be solved by partitioning the region A into disjoint sectors [20]. Consequently, MUDC is reduced to MSC and many well-known algorithms can be applied, for example, the greedy algorithm is the best approximation algorithm and the approximation factor is well known.
To identify necessary sectors is a key factor to whether the solutions found by the algorithms for the transformed MSC are valid, that is, the solutions are disk covers of the original MUDC. A naive approach for partitioning is to sample A at uniform spacings in a grid pattern; then the sampling points covered by the same set of nodes would be grouped into one sector. With enough resolution, all necessary sectors can be successfully identified at the expense of computation time.
However, to determine a good resolution may be difficult. For example, Figure 11 shows that inappropriately increasing resolution may not necessarily find a valid solution, and Figure 13(a) illustrates that the ratio of successfully finding a valid solution decreases as the node density decreases. Therefore, we propose an arc sampling approach which is inspired by the theorem of the paper [32], that is, A is covered if and only if the perimeter of each node's sensing region is covered. (Several special cases including boundary are also discussed in [32].)

The solution found at different sampling intervals. Increasing resolution may not necessarily find a valid solution.
Consider the node n with its neighbors, that is, the nodes with distance not greater than 2 from n. As illustrated in Figure 12, n's perimeter is divided into disjoint arcs by its neighbors' perimeters and the boundary of A. It is obvious that all points of each disjoint arc in A are covered by the same set of nodes. Thus, we can simply choose a point such as the midpoint from each arc in A, for example,
(1) (2) (3) (4) (5) (6) (7) (8) (9) (10) List angles on the polar coordinate system with reference to (11) (12) (13) (14) (15)

Each arc in A, that is,
The experiment results show that the arc sampling approach is effective and effcient for reducing MUDC to MSC.
The arc sampling algorithm is shown in Algorithm 1. Here
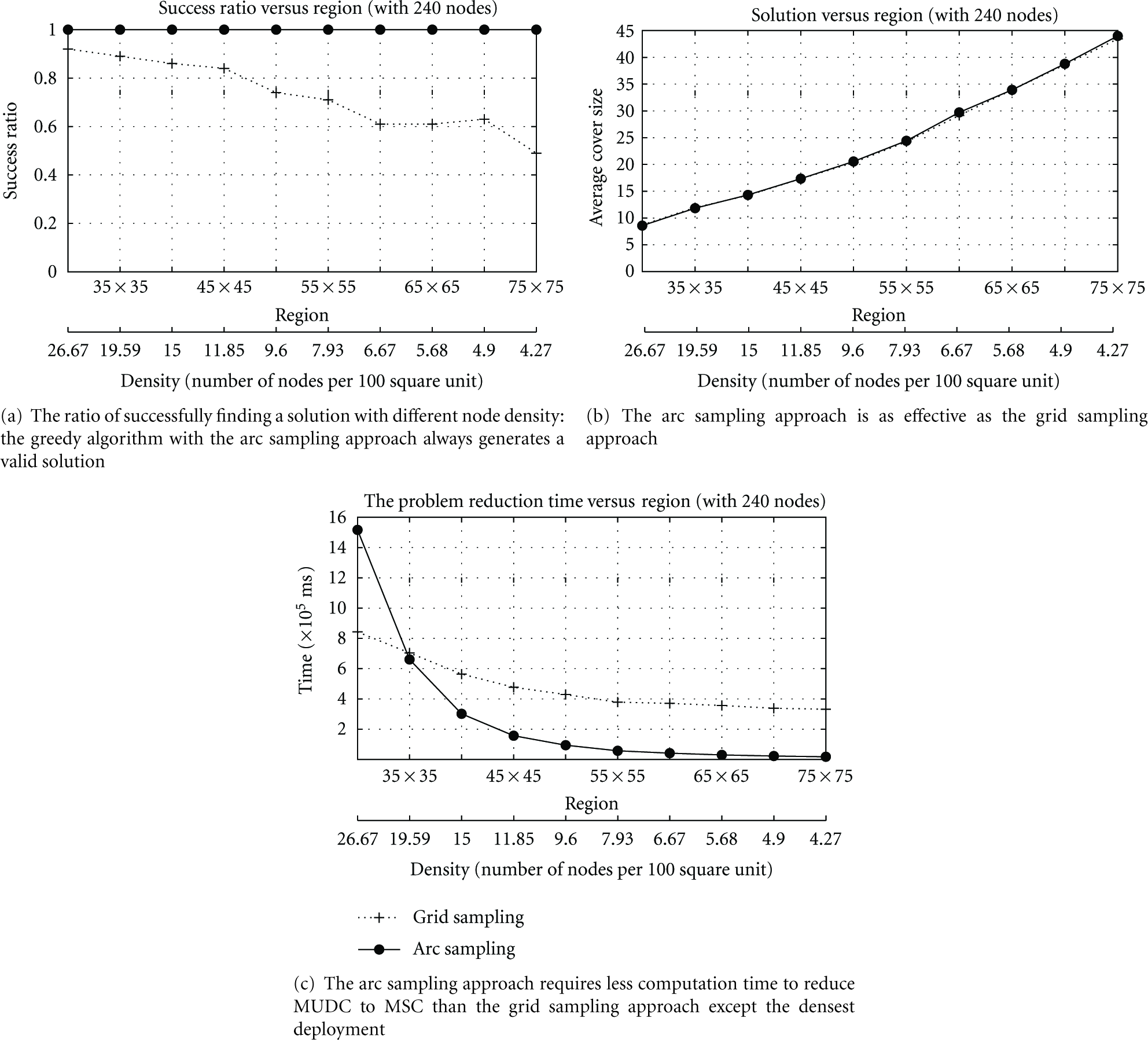
We conducted an experiment to compare the grid sampling and the arc sampling approaches. In the experiment, there are 240 nodes deployed uniformly in a square region ranging from
Figure 13(b) shows the effectiveness of the arc sampling approach. The solutions from both approaches have almost same sizes, that is, same number of nodes. However, Figure 13(a) shows that not every solution obtained from the grid sampling approach is valid. Figure 13(c) illustrates that the arc sampling approach requires less computation time to reduce MUDC to MSC than the grid sampling approach except the densest deployment. Thus, the arc sampling approach is effective and efficient for reducing MUDC to MSC.
7. Decentralized Polynomial Approximation Algorithms
Algorithm 1 and the greedy algorithm may not be suitable for all practical sensor network applications, since it is a centralized algorithm at the cost of potentially excessive communication across the whole network and communication accounts for the majority of energy consumption. The communication power consumption increases with number of nodes and internode distances, so it is not well scalable. Unless the nodes involving in the communication and computation have enough resources, the algorithm may not complete successfully.
Thus, we present a decentralized algorithm in which nodes only require local information by using the divide and conquer technique described in [42] and derive its approximation factor. Furthermore, if the maximum node density is fixed, we may design a constant approximation factor algorithm by using the similar technique. (Note that MUDC remains NP-complete even with fixed maximum node density. It could be easily proved from the fact that the density of MUDC(B) in the NP-completeness proof of MUDC is bounded by a constant.)
7.1. Decentralized Greedy Approximation Algorithm
The proposed algorithm for the instance Use Algorithm 1 to determine sampling points. Divide A into vertical strips with width being the diameter of the sensing region, that is, 2. Each strip is left closed and right open. Number strips from left to right. There are total I strips. Divide each strip into cells with length being the diameter of the sensing region. Each cell is bottom closed and top open. Number cells from bottom to top. Denote the jth cell of the ith strip as Apply the greedy algorithm to each cell, that is, select a node that covers the maximum number of uncovered sampling points in the cell. Denote the solution of Output the solution
Figure 14(a) illustrates that A is divided into

Divide and conquer: (a) The monitored region A (enclosed in heavy line) is divided into
For each cell
Theorem 23.
The above algorithm has an approximation factor
Proof.
The theorem is the result of the shifting lemma in [42]. The proof proceeds as follows.
For
Consider the ith strip, and define the following disjoint subsets of
Note that since the length of cells is the diameter of the sensing region, the union of the above disjoint subsets is 
Similarly, it can easily be derived that 
and then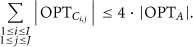
Consequently,
Note that, obviously,
7.2. Constant Approximation Factor Algorithm with Fixed Maximum Density
When the maximum node density, denoted as d, is fixed, the similar divide and conquer technique can be used to derive a constant approximation factor algorithm.
The algorithm is almost the same as the previous one except Step 4, which will be modified as follows:
(4) Apply an exhaustive search for optimum solution to each cell. Denote the solution of
Theorem 24.
The above algorithm has a constant approximation factor 4.
Proof.
Note that the number of nodes in each cell's repository is at most 
7.3. Performance Evaluation
We conducted various simulations to evaluate the proposed algorithms. In Figure 15, nodes are deployed uniformly within a
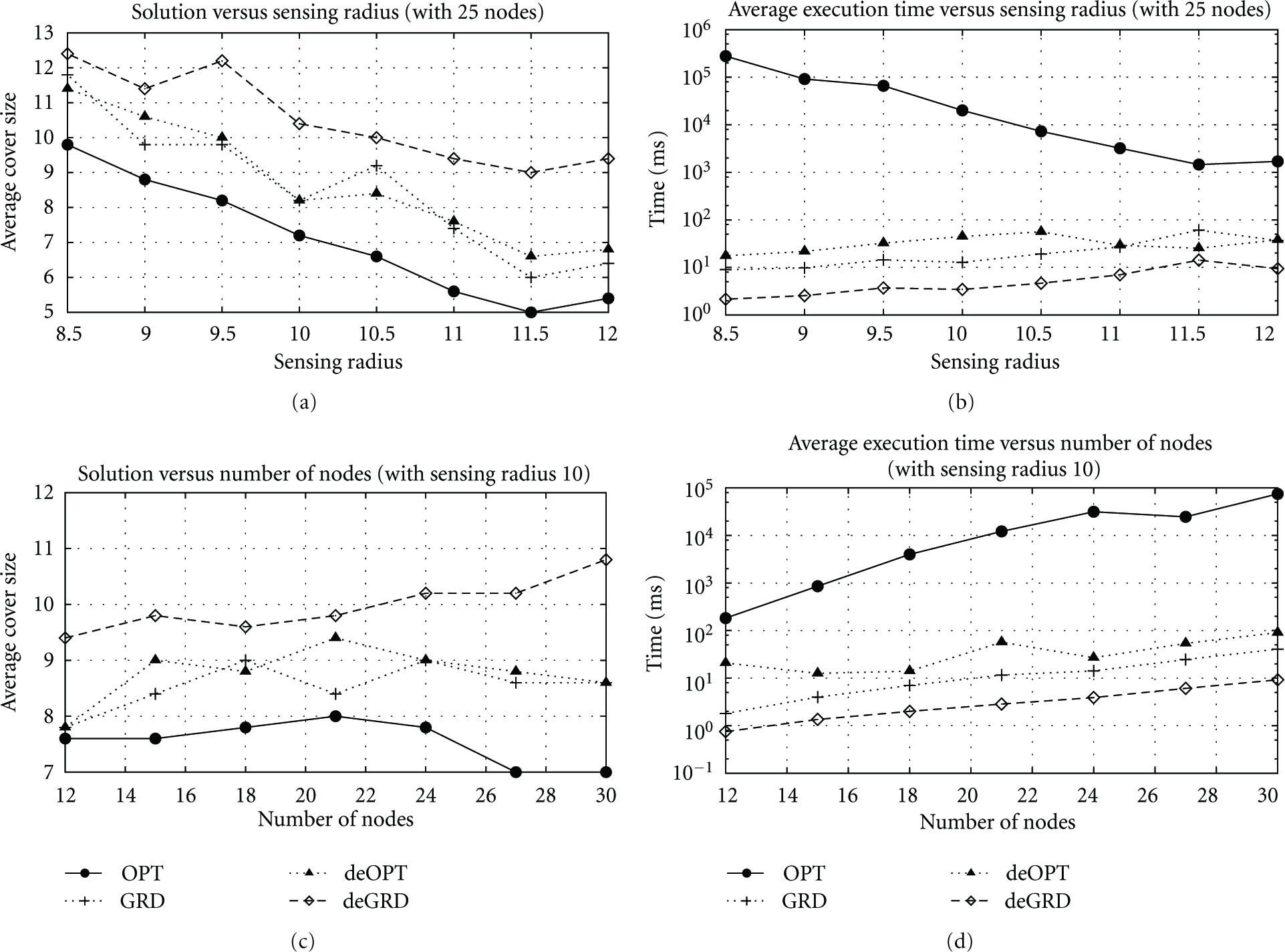
Performance evaluation: the nodes are deployed uniformly within a
Figures 15(c) and 15(d) indicate the solution size and execution time for various number of nodes in which the sensing radius is fixed at 10. The cover size does not change significantly as the number of nodes increases, since the sensing region of each node does not change.
We also considered the scenario in which nodes are deployed in a Gaussian distribution with the peak located at the center of A and the variance 15, and the results are illustrated in Figure 16. Here A is a

Performance evaluation: the nodes are deployed in a Gaussian distribution with the peak located at the center of A and the variance 15. Here A is a 30×30 square region.
Furthermore, in Figures 16(c) and 16(d), the sensing radius is fixed at 10 and the number of nodes varies between 12 and 30. Similarly,
8. Conclusion
In this paper, we consider the complexity of MUDC, the Minimum Unit-Disk Cover problem. This problem has applications in extending the sensor network lifetime by selecting minimum number of nodes to fully cover a geometric connected region of interest and putting the remaining nodes in power saving mode. MUDC is a restricted version of MSC where the sensing region of each node is a unit-disk and the monitored region is geometric connected, a well-adopted network model in many works of the literature.
To prove the hardness of MUDC, we construct various structures to represent variables and edges of a given P3SAT instance's bipartite graph
We also discuss several optimum problems with various coverage constraints introduced by different sensing applications. These problems are extensions of MUDC, and their NP-completeness proofs are presented as a corollary.
We propose the arc sampling algorithm which may effectively and efficiently reduce MUDC to MSC, and many well-known algorithms can be applied to find approximated solutions. We also propose a decentralized algorithm with a guaranteed performance. The algorithm requires only local communication, that is, a node does not need to communicate with others further than
Footnotes
Appendices
Acknowledgment
This research was supported by National Science Council (NSC), Taiwan, under Grant NSC 99-2221-E-194-021. The author gratefully acknowledges this support.