
Abstract
Self-localization of sensor nodes is one of the key issues in wireless sensor networks. Based on the analysis of traditional range-free algorithms such as centroid and APIT (approximate perfect point in triangulation test) schemes, the effect of random deployment of all nodes on node localization is researched. And then, an improved centroid localization algorithm (ICLA) based on APIT and the quality of perpendicular bisector is proposed. In ICLA, nodes are categorized into several kinds and localized, respectively. Extensive simulation results indicate that ICLA obtains a better localization result in random topology networks without any additional hardware. Therefore, ICLA can be an alternate solution for the node self-localization problem in large-scale wireless sensor networks.
1. Introduction
The increasing miniaturization of electronic components and the advance in modern communication technology lead to the development of extreme small, cheap, and smart sensor nodes, which are able to sense the environment, compute simple tasks, and exchange data among each other. Interconnected assemblies of such devices, called Wireless Sensor Networks (WSNs), are commonly used to monitor huge inaccessible terrains [1– 3].
The inherent characteristics of WSNs make a node's location an important part of their state. For such networks, location is being used to identify the location at which sensor readings originate, which is essential in most of the WSNs applications [4], where the measurement data is meaningless without the knowledge of precise location from where it is obtained [5, 6]. In addition to the applications and protocols mentioned, continued research in WSNs will serve to invent and identify many additional protocols and applications, many of which will likely depend on location-aware sensing devices.
WSNs localization algorithms are used to estimate the location of sensor nodes in the network with knowledge of location of few specific nodes called beacon nodes, which can obtain their location using global positioning system (GPS), or by placement of beacon nodes at points with known coordinates.
Many localization algorithms have been proposed to provide location information of nodes. With regard to the mechanisms used for estimating location, these localization protocols are classified as two categories: range-based methods [7, 8] and range-free methods [9, 10]. The former is defined by protocols that use absolute point-to-point distance estimates (range) or angle estimates for calculating location. The latter makes no assumption about the availability or validity of such information. Because of the hardware limitations of WSNs devices, solutions in range-free localization are being pursued as a cost-effective alternative to more expensive range-based approaches.
Bulusu et al. proposed a simple range-free localization algorithm called Centroid Localization Algorithm (CLA), which needs only a minimum of computations [9]. In CLA, all nonlocalized nodes calculate their position as the centroid of all received beacon's positions. But the inherent bias of CLA was not considered. In Recent years, some improved Centroid algorithms based on certain weighted methods have been proposed. Most of the improved algorithms have combined the distance information and require distance measurement through some range methods like Received Signal Strength Indicator (RSSI), which depress the expansibility. What's more, the localization of nodes on the edge of network has not been considered in most range-free algorithms. With special topology, these nodes should be treated distinguishingly. Or else, the average localization accuracy will be affected negatively.
In this paper, without using RSSI or any other parameter, we present our investigations concerning the bias of CLA and the achievable improvement when correcting the bias, utilizing APIT (approximate perfect point in triangulation test) [10] and the quality of perpendicular bisector. Our approach (ICLA) will be evaluated in terms of accuracy and communication overhead, compared with CLA. Moreover, we extend our approach to localize nodes at the borders of the network to improve average localization accuracy.
The remainder of the paper is organized as follows. In Section 2, the original CLA algorithm is introduced and analyzed. In Section 3, our approach (ICLA) to reduce the localization bias of centroid estimation is proposed. In Section 4, results of the corresponding computer simulations are presented and the performance of ICLA is compared with CLA. Finally, Section 5 closes with a conclusion and future work.
2. State of the Art
The only kind of distance information used in CLA is the binary information whether the unknown is in the communication range of a beacon or not. CLA acts from the assumption which that each beacon has a circular area within it can communicate with other nodes. In Figure 1, it is shown how the communication ranges of four beacons, arranged as described above, build up to several intersecting areas within an unknown can be localized.
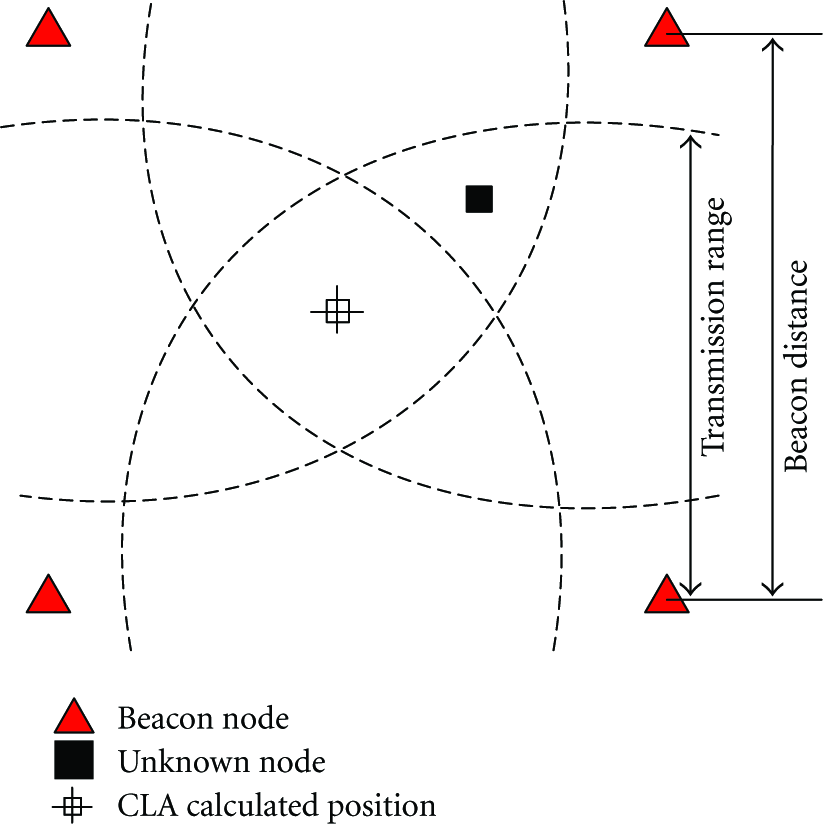
Localization principle of CLA.
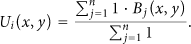
CLA uses the location information of all beacons in range to calculate the position as the centroid of the received beacon positions [9], as the centroid as shown in (1). In this formula,

Depending on the given calculation, a node which is situated within one of the intersecting areas will calculate its position at one single point, regardless of its exact position within the intersection area. For example, a node which is able to communicate to all of the four beacons will calculate its position in the centre of the arrangement, as shown in Figure 1.
This behavior leads to a relative high localization failure, given as the Euclidian distance between the exact position of a sensor node and its calculated position. Blumenthal et al. showed in [11] that the averaged localization failure cannot be less than 18% of the beacon distance for CLA. This comes along with a maximum localization failure of 45%. This corresponds with the findings published by Bulusu et al. in [9]. Blumenthal et al. also showed that the localization failure depends on the ratio between the beacon distance and the communication range. The cited values belong to an optimal transmission range of 87% of the beacon distance as it is illustrated in Figure 1.
However, former analysis of CLA mostly investigated the impact of the transmission range on the accuracy of the localization [12, 13], and some simulation were carried out in a 4-beacon scenario [11, 14, 15] which can be impractical for large-scale outdoor sensor network.
3. Improved Centroid Localization Algorithm
To reduce the localization bias in asymmetry network, an improved centroid estimation method based on APIT and the quality of perpendicular bisector is proposed in this section.
3.1. Analysis of Different Nodes in Network
Obviously, the location of beacon nodes impacts the estimated centroid, as a result, it also affects the localization error. It is instinctive that any three different beacon nodes not in a line can form different triangle. And approximate perfect point in triangulation test (APIT), which takes advantage of the relatively high node density of these networks and uses neighbor information exchanged via beaconing to emulate the node movement, can judge which triangles an unknown node resides in [10]. For a detailed analysis of network topology, according to the distribution of beacon nodes in transmission range and results of APIT, unknown nodes in network can be classified as four categories: normal node, side node, hypoisolated node, and isolated node. Suppose node i is defined as a normal node when node i is defined as a side node when node i is defined as a hypo-isolated node when node i is defined as an isolated node when
In order to study the node distribution of different categories in random network, MATLAB is adopted in the following simulation experiments. We assume that 200 sensor nodes (50 beacon nodes and 150 unknown nodes, with the same transmission range) are deployed randomly in a square field of 100 m × 100 m, and the transmission range of each node is 20 meters. Figure 2 shows nodes distribution in a virtual simulation and Figure 3 indicates the percentage of different categories of nodes to all unknown nodes versus transmission range.

Nodes distribution.
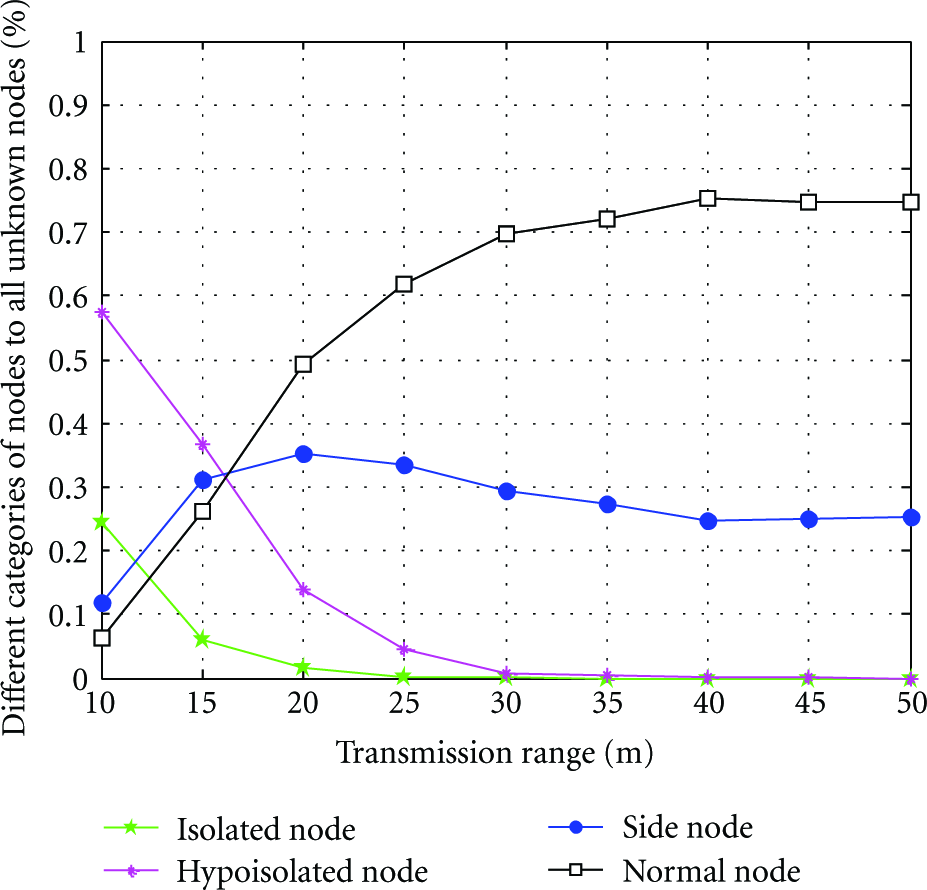
Percentage of different categories of nodes to all unknown nodes versus transmission range.
3.2. Analyzes of Normal Node
Node i is a normal node, which means that Node i resides in at least one triangle formed by beacon nodes. And the location problem of node i can be solved by an improved CLA based on APIT and the quality of perpendicular bisector, as showed in Figure 4. These triangles formed by beacon nodes are picked out to estimate the location of the unknown node, that is, according to the property of the three altitudes, a triangle can be divided into some small cells. One of these cells, which the unknown node resided in, can be estimated out, utilizing received signal strength (RSS) value between the three beacon nodes and the unknown node for the reason that RSS reflects the distance between two nodes in transmission range.

Illustration of ICLA in an acute triangle.
Suppose a line which passes through two points

If unknown node resides in a triangle, without loss of generality (WLOG), for an acute triangle
WLOG, suppose an unknown node

Besides, right triangle and obtuse triangle can be divided into four cells by three perpendicular bisectors, as showed in Figure 5.

Triangle divided by Perpendicular Bisectors: (a) right triangle; (b) obtuse triangle.
3.3. Analyzes of Side Node
If
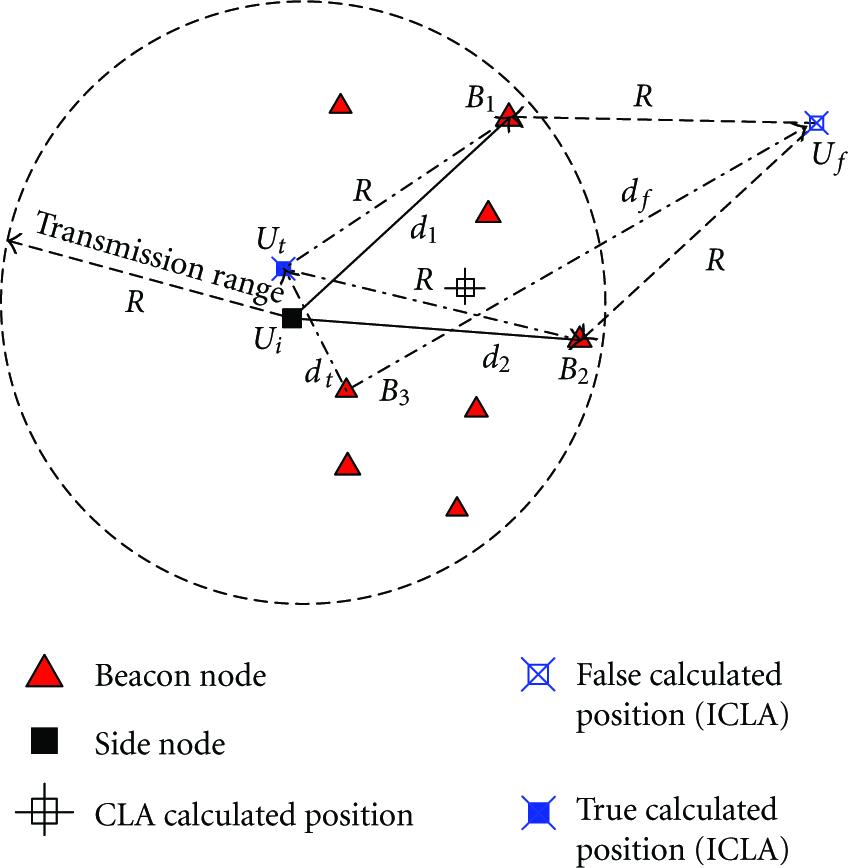
Localization principle of side node in ICLA.
Obviously, range between nodes is in inverse proportion to RSS. In the environment with no signal disturbance, feebler RSS indicates farther range. Thus, in a densely deployed network, the range corresponding to the feeblest RSS inclines to the transmission range (R). According to this relation, beacon nodes around unknown node

3.4. Analyzes of Hypoisolated Node
For hypoisolated nodes, CLA still performs only averaging the coordinates of beacon devices to localize blindfolded devices. However, ICLA uses weights to ensure an improved localization. Starting from the calculation of the arithmetic centroid as showed in (1), the formula to determine the position with Weighted CLA is derived. Expressing the term m as sum of ones and the multiplication of
After replacing ones in (5) by weight functions

The weight

3.5. A Walk through ICLA
In this section, we present an example to further explain our localization scheme ICLA.
In the first phase, all beacon nodes send their position Suppose that an unknown node M has received n beacons. Each node maintains a data table (beacon node ID, Location, RSS) for each beacon node heard, that is, node M has received beacons from beacon nodes A, B, C, D and as showed in Table 1 and node 1 in Table 2. Then, each node beacons once to exchange data tables with its neighbors. Thus, these data tables are merged at every node to maintain neighbors state. Suppose node i to be neighbor of node M, Beacon nodes A, B, C, and D can form four triangles Like node M, each node repeats step (5) for varying combinations of three beacon nodes. Then, if node M does not reside in any triangle, it is a side node which can be localized using the algorithm described in Section 3.3. And if node M resides in
Node M.

Node 1.
Combined data of node M.

4. Performance Evaluation
This section provides a detailed quantitative analysis evaluating the performance of ICLA compared with CLA.
4.1. A Note in Evaluation
The obvious metric for comparison when evaluating localization schemes is localization error. We have conducted a variety of experiments to cover a wide range of system configurations including varying (1) percentage of beacon node (PBN), (2) transmission range (R), (3) radio propagation patterns denoted by degree of irregularity (DOI) and (4) success rate of APIT (SRA), a common set of system parameters shared by most range-free localization algorithms.
However, it is better to note that since there is no interaction between nodes in the ICLA, instead, we take SRA as a system parameter to evaluate algorithm. On the other hand, because communication can have a significant impact on wireless sensor network systems, communication overhead in terms of number of messages exchanged, as a telling secondary metric, is used to evaluate the cost and performance of ICLA.
We assume that 200 nodes, including beacon nodes and unknown nodes, are deployed randomly in a square field of 100 m × 100 m. Outside of studying the effect of certain parameters on localization error, we use default values of PBN = 30%,
4.2. Localization Error When Varying PBN
In this experiment, we analyze the effect of varying percentage of beacon node (PBN) in network to determine its effect on localization error for random node placement. Figure 7 shows that the overall estimation error constantly decreases as PBN increases. We note that CLA and ICLA are both sensitive to PBN due to the fact that centroid estimation in these two schemes similarly relies on the average data of beacons around. However, it is important to note that our ICLA algorithm consistently performs better than the CLA and ICLA requires only less than 25% PBN to reach the 0.15R level while the CLA requires more than 45%. This is due to the fact that the possible area where unknown node resides in is much smaller. And this effect is significantly enlarged by increasing PBN.
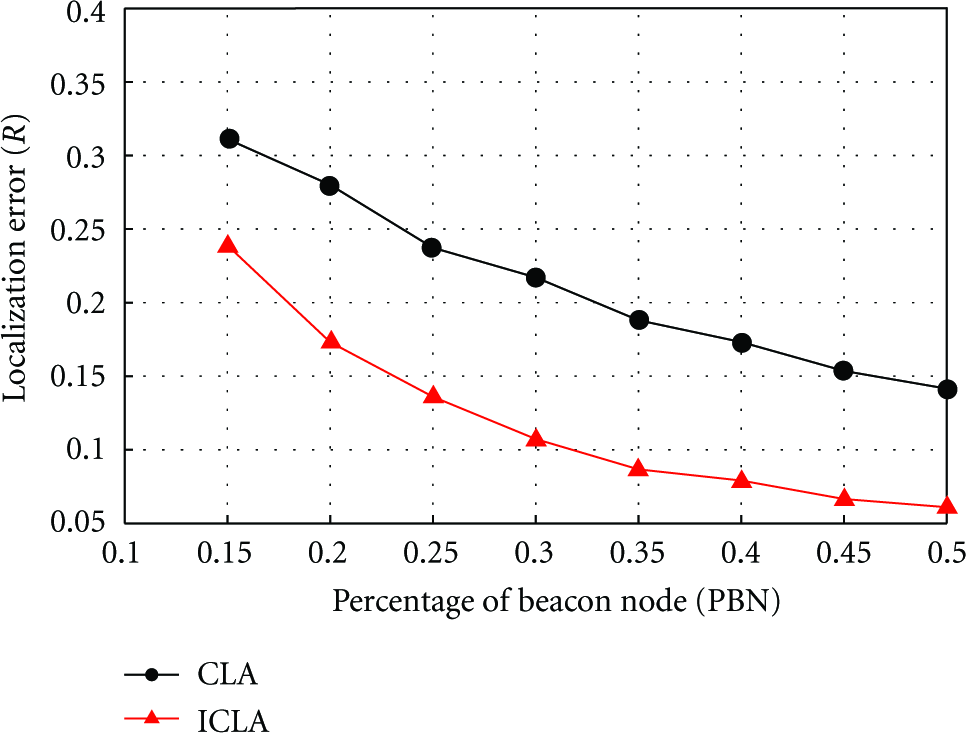
Localization error under varying PBN.
4.3. Localization Error When Varying R
Figure 8 explores the effect of transmission range (R) on the localization estimation accuracy. Because the number of beacon nodes heard is affected by transmission range, the estimation error is large when R is below 20 m. But it should be noted that localization error decreases consistently and rapidly as R increases for ICLA but not for CLA, due to larger accumulated error result from larger beacon propagation distances and its relatively simple design in CLA.

Localization error under Varying R. PBN = 0.3, DOI = 0.1, SRA = 0.9.
And in comparison to CLA, the increase in the location accuracy for ICLA is due to the fact that an increase in the transmission range results in more triangles formed by beacon nodes taking part in localization. Especially, ICLA can produce good results (localization error below 15%) as long as transmission range remains above 30 m.
4.4. Localization Error When Varying DOI
Simulation in Almost all algorithms assumes that radio patterns are perfectly circular, which disaccords with wireless communication. And it is intuitive that irregular radio patterns can affect the network topologies resulting in irregular node connectivity. So, in this experiment, the impact of irregular radio patterns on the precision of localization estimation is investigated.
We can see, in Figure 9, how the inaccurate estimate directly contributes to localization error as the DOI increases. In the same way, CLA and ICLA acquire beaconed information using online information exchanged between beacon nodes. However, because the effect of DOI is abated by the aggregation of beaconed information and localization results in different combinations of beacon nodes are fused in ICLA, ICLA is more robust than CLA relatively.

Localization error under varying DOI. PBN = 0.3,
4.5. Localization Error When Varying SRA
Because APIT can only evaluate a finite number of directions (the number of neighbors), APIT can make an incorrect decision (InToOut error and OutToIn error). Fortunately, from experimentation, He et al. find that the percentage of APIT tests exhibiting such an error is relatively small (14% in the worst case). When node density increases, APIT can evaluate more directions, considerably reducing OutToIn error. On the other hand, InToOuterror will slightly increase due to the increased chance of edge effects. Figure 10 shows the effect of SRA on the localization estimation accuracy. We note that the overall localization error constantly decreases as SRA increases. This occurs because APIT is a key phase, which determines how much beacon triangles used in node localization and which category the unknown node belongs to. It is instinctive that more authentic data for localization leads to more accurate results. However, we also note that when the SRA is higher than 0.9, localization error toboggans (under 0.2R) due to the increase of available data for localization. In this system configuration, ICLA has good performance.

Localization error under varying SRA. PBN = 0.3, DOI = 0.1,
4.6. Evaluation Summary
In addition to the analysis previously described, a variety of experiments have been conducted to cover a varying range of system configurations for evaluating localization schemes in this section. These experiments help us better understand the situations where our localization scheme considered is more appropriate than CLA.
From our extensive comparison study, we identify preferable system configurations of traditional range-free localization schemes as a design guideline for further research. In particular, an ICLA scheme, proposed in this paper, performs better than CLA when percentage of beacon node, irregular radio patterns, and random node placement are considered. Moreover, we provide insight on how the transmission range and success rate of APIT affect the localization error. These results show that the accuracy provided by ICLA is sufficient to support various WSNs applications mainly discussed in [10]. However, ICLA requires more communication overhead than the CLA because of the neighborhood information exchange for APIT. In great detail, CLA requires that only each beacon node beacons once, but each beacon node or unknown node in network has to beacon once in ICLA. Nevertheless, communication overhead in ICLA, as much as APIT scheme, increases with increased node density; however, it does so at a much lower rate than some localization algorithms using flood-style transmission [10].
On the other hand, we can conclude that aggregated decisions can provide good accuracy during location estimation by exploiting redundancy and high node density, which are the key positive characteristics of wireless sensor networks over traditional ad hoc networks, regardless of the fact that information obtained by an individual test is coarse and error-prone.
5. Conclusion and Outlook
Given the inherent constrains of the sensor devices envisioned and the estimation accuracy desired by location-dependent applications, range-free localization schemes are regarded as a cost-effective and sufficient solution for node self-localization in sensor networks.
A simple approach for coarse grained localization is centroid localization algorithm (CLA) which assumes regularly arranged beacons. Unfortunately, CLA has a biased error, especially when all sensor nodes are deployed randomly. Based on investigation of the bias and its impacts on localization error, this paper presented ICLA as an improvement of CLA. ICLA approach achieves considerable improvements in accuracy by utilizing additional topological knowledge and RSS. And we showed that correcting the location estimating of normal nodes as well as side nodes and hypoisolated node leads to improved accuracy. The correction for side nodes is from special significance. These nodes, usually being deployed at the edges of the sensor field and not enclosed by beacons communication ranges, need special localization scheme presented in ICLA.
In conclusion, our approaches to correct localization error in this paper are also of practical importance and can be used for irregularly arranged networks with relatively large number of beacons. Future research may include an adaptation of other CLA-based localization algorithms. In addition, a number of practical factors which may affect efficiency, accuracy, and flexibility of our localization approaches will also be considered.
Footnotes
Acknowledgment
This work was financially supported by Shandong Provincail Natural Science Foundation of China under Grant no. ZR2011FQ002.