
Abstract
The significance of information fusion for structural health monitoring and damage detection is introduced. The three levels of information fusion for multisensors are described. For the complex in the structural health monitoring, the distributed multisensor information fusion is more suitable and the structure is discussed. In the damage information fusion for character level, the concept for structural integral support vector machine damage detection matrix, damage self-information, and damage information entropy are presented. For a complex structure, it can be divided into multiple substructures in order to simplify the difficult for health monitoring, the data acquisition and support vector machine are established for each substructure in order to form integral damage detection matrix. In the damage information fusion for decision level, the methods based on fuzzy set theory, material element theory, and fuzzy neural network are proposed. The results given by a numerical example about space structure show that all the methods are valid and effective.
1. Introduction
Civil structures are inevitable to suffer from environmental corrosion, long-term fatigue effects, or natural disasters, and then the damage accumulates during long service period. Therefore, intelligent heath monitoring and damage diagnosis for structures become an important technology to study [1]; detecting and predicting the structural damage in time is necessary for future engineering. Detecting structural damage state by its dynamic characteristics, such as frequencies, mode shapes, and frequency-domain transfer function, is an important method. However, the damage detection method based on vibration testing has respective limitation. The research achievement based on soft computing is needed to be introduced to the damage detection and monitoring study.
Structural health monitoring (SHM) is defined as “the use of in-situ, non-destructive sensing and analysis of structural characteristics, including the structural response, for detecting changes that may indicate damage or degradation in the structure.” One essence of a well-designed SHM system is the ability to provide advance warning to the bridge owners and managers when abnormality is about to occur or is occurring. In general, an SHM system has the potential to provide both damage detection and condition assessment of a structure. A typical SHM system includes three major components: a sensor system, a data processing system (including data acquisition, transmission, and storage), and a health evaluation system (including diagnostic algorithms and information management).
Housner summarized types of sensors used for structural control applications in civil engineering which was similar to SHM in nature [1]. Typically kinematic quantities (e.g., strain, displacement, and acceleration) and environmental quantities (e.g., temperature, humidity, wind, etc.) are the two categories of quantities that are critical to any SHM system. The most common types of sensors used in SHM applications include displacement sensors, strain sensors, vibrating wire sensors, accelerometers, force sensors, and temperature sensors. Numerous research projects and technical reviews have shown that conventional sensors are easily affected by changes in external factors such as temperature, humidity, cable length, magnetic, or electric fields, and so forth. These factors make it difficult to obtain stable and reliable readings on a long-term basis. These problems are gradually overcome as more advanced sensing technology is developed.
Structural health monitoring (SHM) is a multidisciplinary and integrated technology; hence it is difficult to resolve many practical problems for large and complex structures merely based on vibration testing. Improving the finite element updating technology for health monitoring and state evaluation, combing modern signal analysis technology and soft computing theory, mining structural characteristic data deeply, and realizing the real time, online dynamic monitoring, and control, is the developmental direction for SHM.
The health monitoring, damage detection, and decision problem are very complex for large and complex engineering structure, which need multiclass and multiple sensors to collect different signals simultaneously; thus, a multisensor system is established. Information fusion or data fusion is one of the key technologies of the multisensor system. Information fusion is the merging of information from disparate sources with differing conceptual, contextual, and typographical representations, and it involves the combination of information into a new set of information towards reducing uncertainty. The main objective of employing fusion is to produce a fused result that provides the most detailed and reliable information possible [2]. Fusing multiple information sources together also produces a more efficient representation of the data. Generally, Information fusion aims to take full advantage of different time and space, multisensor information resources, automatically analyze, integrate, control, and use the information under certain criteria to get the consistent describe of the measured object, in order to complete the necessary task on decision-making and estimated.
Information fusion can be performed at three different processing levels which are data level fusion, feature-level fusion, and decision-level fusion according to the stage at which the fusion takes place.
Data level fusion, which is a low level fusion, is the registration and combination of the raw data from multiple-source data into a single data. Feature level information fusion is the extraction, registration, association, and comprehensive analysis on the data which reflect the system characterization, increasing the dimensions to describe the structural status or characteristics before features are merged together; hence, the knowledge about the system status is more accurate or complete. Decision-level fusion combines the results from multiple algorithms to yield a final precise or definite decision according to the prior diagnosis knowledge, the diagnosis sample database and the intelligent decision-making system. In conclusion, the flow chart of the information fusion levels of SHM system is shown in Figure 1.

Flow chart of information fusion levels of SHM system.
The structure of the multisensor information fusion system can be divided into two types: centralized structure and distributed structure according to the method for information collection, fusion, and decision. In the centralized fusion system, the original monitoring data from multisensor is transferred to the fusion center without analysis, and then the data is analyzed by the center and makes a final decision by data combination, filter, and feature extraction according to certain criteria and algorithms. However, in the distributed fusion system, the local decision is made by the decision points from a group of sensors if the performance and precision is ensured. Then the monitor is composed of multisensor and local decision points simultaneously. The various local decisions are transferred to fusion center to make the final decision. The model of distributed parallel structure for fusion system is shown as Figure 2. For the distributed fusion technology, the information from each sensor must be analyzed preliminary and make a local decision, and the final decision is made at a higher level, so the amount of transmission data is less and the requirements of the transmission network is relaxed and the processing speed of the fusion center is higher for the distributed multisensor information fusion system. For SHM system, the sensors layout and wiring is complex, the amount of data is large, thus the centralized fusion system is not suitable. Hence, the distributed multisensor information fusion structure is adopted and mainly studied in this paper.
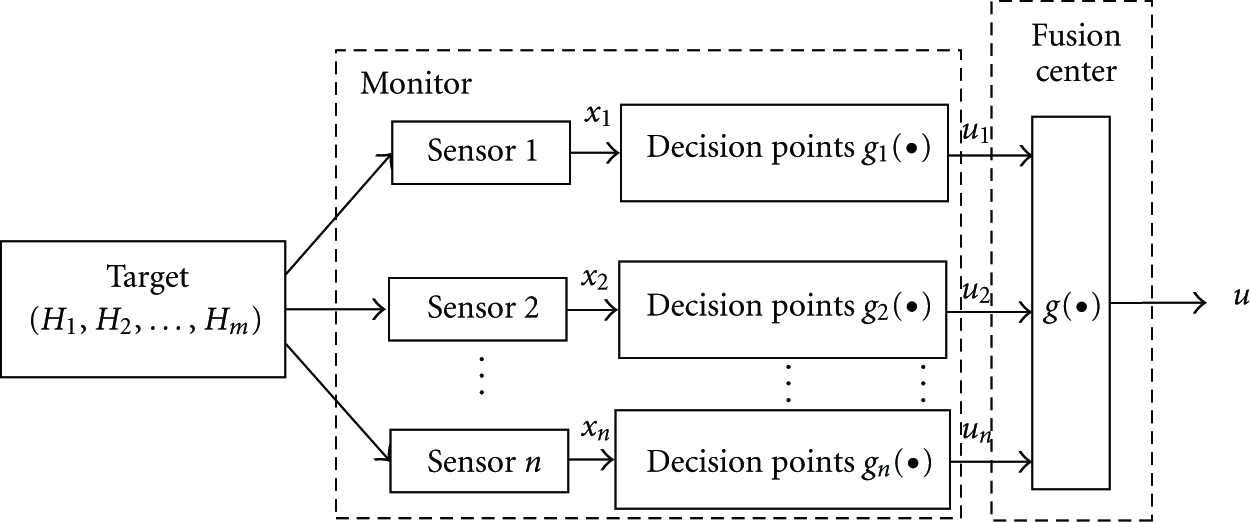
Model of distributed fusion structure.
In many cases, the sources of structural health information are sensors or other devices that allow for perception or measurement of changing environment [3–5]. The current technology and method on multisensor information fusion is numerous, but the information fusion algorithms in SHM can be classified into three different groups. First, fusion based on probabilistic models, second, fusion based on least-squares techniques, and, third, intelligent fusion.
The probabilistic model methods are Bayesian reasoning, evidence theory, robust statistics, and recursive operators [6–9]. There has been a substantial amount of research work conducted in the area of decision fusion, most of which is built around Bayes theory. The basic strategy is that if the prior probabilities and conditional probabilities are determined in advance, then the posteriori probabilities (and hence optimal decisions) can be estimated using Bayes formula. A Bayesian network is used to combine probabilistic reasoning with time-dependent parameters. As an extension to Bayes theory, the Depmster-Shafer evidence theory uses belief and plausibility functions to quantify evidence and uncertainty. Dempster-Shafer evidence theory models how the uncertainty of a given hypothesis or discourse diminishes as pieces of evidence accumulate during the reasoning process. One important aspect of this theory is that reasoning or decision making can be carried out with incomplete or conflicting pieces of evidence.
The least-squares techniques are Kalman filtering, optimal theory, regularization, and uncertainty ellipsoids. The method that is the most widely used or data fusion in engineering applications is the Kalman filters [10]. This filter is often used to combine all measurement data (e.g., for fusing data from different sensors) to get an optimal estimate in a statistical sense, if the system can be described with a linear model and both the system error and the sensor error can be modeled as Gaussian noise, then the Kalman filter will provide a unique statistically optimal estimate for the fused data. This means that under certain conditions the Kalman filter is able to find the best estimates based on the “correctness” of each individual measurement.
The intelligent fusion methods are fuzzy logic, neural networks and genetic algorithms. D-S evidence theory is efficient method processing uncertain information in data fusion, but the combination result may be unacceptable if the evidences highly conflict with each other. In the presented work, a modified combination rule of D-S theory is proposed to solve the problem of evidences with confliction, which is related evidence focus to the amount of useful information of evidences. Furzy logic provides a new tool to solve the uncertain problem and describe the fuzzy characteristics of target. Especially, fuzzy logic is fit for describing and processing the uncertain information from multiple sensors [11]. An artificial neural network (ANN) is a massively parallel distributed processor that can be used to model highly complex and nonlinear stochastic problems. The ANN is formed of smaller units called neurons and is trained through a learning process, while interneuron connection strengths, known as synaptic weights, are used to store the knowledge. So part of data fusion could be realized by neural networks when the multiple data is inputted [12–14].
In recent years, the methods such as the fuzzy logic system, artificial neural networks, and other soft computing methods develop rapidly, which provides a solid theoretical basis for information intelligence fusion. In this paper, the support vector machine method, the fuzzy sets, the artificial neural network and the matter-element theory are introduced and used, combined with some of the concepts of information theory, and multilevel information fusion for the structural damage diagnosis is studied.
2. Feature-Level Fusion for
2.1. Damage Diagnosis Matrix
Traditional modal analysis technique for structural damage identification is often difficult to obtain satisfactory results for large complex structures. The intelligent methods such as support vector machine (SVM) can effectively improve the accuracy of structural damage identification [15]. The original structure can be divided into multiple substructures, and then the detail damage can be identified using support vector machine (SVM) for each substructure [16]. If the number of the components in the substructure is still large, the feature-level fusion for damage information can be carried out by the making full use of the multiple sensors placed on the substructure.
For example, a space structure is divided into multiple substructures according to the specific forms, then the signals from each substructure are collected and the support vector machine is trained and established. Thus, an integrated damage diagnosis matrix having n substructures and sensors based SVM is as follows:

2.2. Self-Information and Damage Information Entropy
Information is any kind of event that affects the state of a dynamic system. Conceptually, information is the message (utterance or expression) being conveyed. For structural health monitoring, the information refers to the changes in health status under the influence of the external environment.
In information theory, entropy is a measure of the uncertainty associated with a random variable, which quantifies the expected value of the information contained in a message [17]. Equivalently, the Shannon entropy is a measure of the average information content one is missing when one does not know the value of the random variable. Shannon's entropy represents an absolute limit on the best possible lossless compression of any communication, under certain constraints: treating messages to be encoded as a sequence of independent and identically distributed random variables.
Named after Boltzmann's H-theorem, Shannon denoted the entropy H of a random variable X and probability unction p(X) as


The damage information entropy for component x is defined as the weighted average value of the self-information:

3. Decision-Level Fusion for
3.1. Damage Information Fusion Model Based on Fuzzy Set
In many practical cases, the structural damage is a fuzzy and vague state because there are no obvious and clear grading marks in the actual health status. Thus, it is more scientific and objective for structural damage according to fuzzy set theory by introducing the concept of fuzzy subset and fuzzy membership. In classical set theory, the membership of elements in a set is assessed in binary terms according to a bivalent condition—an element either belongs or does not belong to the set. By contrast, fuzzy set theory permits the gradual assessment of the membership of elements in a set; this is described with the aid of a membership function valued in the real unit interval
First, the sing factor decision is made for the single factor
3.2. Damage Information Fusion Based on Fuzzy Set
Considering the various damage factors of the key components, the damage decision in the structural health monitoring should use one or multilevel fuzzy fusion. According to the precision and accuracy of all kinds of sensor, the factor fuzzy vector can be determined by the expert experience or analytic hierarchy process, and the membership function is Gaussian model.
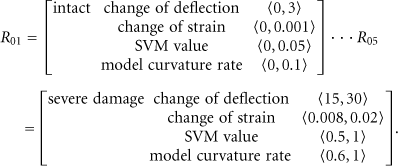
Taking a space structure as an example, the change of deflection and the change of strain, predicts damage values by SVM and modal curvature rate is the main parameters accurately reflect the structural damage information and these are easy to collect. Therefore, these parameters of the key components are monitored. The structural health status is divided into 4 grades: intact, minor damage, moderate damage, and severe damage. The evaluation and grade index are shown in Table 1.
Grade index for structural damage state.

After the fuzzy damage subset is determined, the membership value for the specific damage status in each damage grade can be calculated. In order to meet the requirements of project design, the quantitative description of damage degree is needed. To highlight the dominance hierarchy, the comprehensive damage index for decision making is suggested as
4. Decision-Level Fusion for
The matter-element analysis theory was put forward by Cai Wen to solve the incompatible problems in the 1980s [18]. The theoretical system had been established from the initial matter-element analysis to extension engineering theory. The basic content of matter-element analysis is as follows. Firstly, define the class intervals of each evaluation indicator. Then, calculate the single index correlation degree to determine the damage status by single indicator. Finally, the comprehensive damage grades of all indicators are gained by model integration. Therefore, the evaluation results of matter-element analysis are more reasonable and accurate than other methods.
A given thing is named N, whose characteristic C is valued X. The orderly ternary group 
If the thing has m levels with 
According to the classical domain, the section domain (
The matter-element of evaluation object can be expressed as:
The equation is called evaluation matter-element of
The correlation degree 
The correlation degree 
The value of the correlation degree in the real axis expresses the subjection degree between the evaluated object and a certain grade. The logic value of the correlation degree in matter-element model is in the real axis
Compared with the analysis with fuzzy decision-making methods, the thinking, concept of the matter-element method, is the same. However, the matter-element analysis theory for structural damage information fusion concept is clear, and the selection of the correlation function is more flexibility.
5. Decision-Level Fusion Based on Fuzzy Neural Network Damage Information
A fuzzy neural network (FNN) is a learning machine that finds the parameters of fuzzy sets, by exploiting approximation techniques from neural networks. The FNN model makes use of two artificial intelligent (AI) techniques: fuzzy logic and artificial neural network (ANN). Both neural networks and fuzzy systems have some characteristics in common. They can be used for solving a problem if there does not exist any mathematical model of the given problem. Neural networks can only work if the problem is expressed by a sufficient amount of observed examples. These observations are used to train the black box. On the one hand no prior knowledge about the problem needs to be given. On the other hand, however, it is not straightforward to extract comprehensible rules from the neural network's structure. On the contrary, a fuzzy system demands linguistic rules instead of learning examples as prior knowledge. Furthermore the input and output variables have to be described linguistically. If the knowledge is incomplete, wrong or contradictory, then the fuzzy system must be modified. Since there is not any formal approach for it, the modification is performed in a heuristic way. This is usually very time consuming and error-prone.
Compared to a common neural network, connection weights and propagation and activation functions of fuzzy neural networks differ a lot. The integrated system, called FNN, will possess the advantages of both ANN system and fuzzy system. On the neural side, more and more transparency is pursued and obtained either by restructuring an ANN to improve its performance or by a possible interpretation of the weight matrix following the learning stage. On the fuzzy side, the development of methods allowing automatic tuning of the parameters with the data collected from real-life examples decrease the subjectivity of the fuzzy system. Thus, ANN system can improve its transparency, making it closer to fuzzy logic system, while fuzzy logic system can self-adapt, making it closer to ANN system.
In this paper, a typical five-layer FNN structure is chosen for the markup estimation. It consists of an input layer with identified input factors, a fuzzy layer with membership functions, a rule layer with the collected rules for markup estimation, a back propagation (BP) hidden layer and an output layer with one node which is the estimated markup percentage. The function and calculation process of each layer is discussed below:
layer 1 reads real number input variables layer 2 fuzzifies layer 3 calculates layer 4 is a hidden layer using normal BP rules in ANN, the mapping between the fuzzy input and the fuzzy output is established, and layer 5 defuzzifies the final output M of such a neural fuzzy system with centroid defuzzification equation as follows:
where 


The parameters that need to be tuned are 
The back propagation (BP) learning rule, which is usually used in ANN training process, is adopted as a training method of the FNN system. The parameter learning algorithm for the above fuzzy logic rules are derived and shown below:



Step 1.
The fuzzy logic rules for markup estimation are collected and the input factors and the parameters of the membership functions are identified.
Step 2.
The input-output training data
Step 3.
Fuzzy reasoning is performed for the input data
Step 4.
Tuning of the real number
Step 5.
The fuzzy reasoning conducted in Step 3 is repeated.
Step 6.
Tuning of the parameters
Step 7.
The objective function (or the inference error) (16) is calculated, and Step 3 through Step 6 are repeated until its change
6. Simulation Example
The damage detection and damage data fusion of a single-layer spherical lattice dome is studied in order to validate the information fusion methods in this paper. The diameter of the lamella dome is 30 meters, and the height is 15 meters. The material is seamless steel pipe. The external diameter of the circumferential pipes is 0.18 meter and the thickness is 0.005 meter. The external diameter of the radial pipes and the oblique pipes is 0.2 meter, and the thickness is 0.006 meter. The supports are all fixed hinges. The dead load is 200 Kg/m2. The dome is divided into four regions by its symmetry, which is showed in Figure 3. Five vertical acceleration sensors adapting signal amplifier at the terminal are located at the top center and the middle joints in each region, and the locations are showed by hollow circles in Figure 3.

The of layout graph of the spherical lattice shell and the numbering and zones.
The four regions are considered independent, but the sensor in each region has the sensibility to the damage not only in its own region but also to the regions, and the total support vector machines damage diagnosis matrix SDM has the following form:
The finite element program ANSYS is used for structural damage simulation under ambient vibration. The vibration is simulated by discrete white noise in three orthogonal directions, and the acceleration amplitude at the supports is 
Therefore, the predicted damage probability of element 105 is
Grade index for element 105 damage state.

Consider the importance and calculation accuracy of the grade index about damage state in the factor domain, the weight value matrix of the change of deflection, the change of strain, predict damage values by SVM and modal curvature rate is

Membership grade of the change of deflection.
The fuzzy relation matrix is calculated according to (5) and combined with the weight value matrix, the fuzzy damage vector is

It can be seen from the fuzzy damage vector B that the maximum membership value belongs to the moderate damage, so the medium damage is judged to occur, which is consistent with the actual situation. According to (6), the comprehensive damage index for decision making is 0.541, thus the damage state of element 105 is accurately quantified.
According to Table 2, the grade index range for element in various damage degrees is the domain of classical matter-element:
Referring to Table 2, the correlation degree is calculated according to (11) and (12), and the results are shown in Figure 5. The value for moderate damage is the maximum, so the element is judges as a medium damage, and the conclusion is as same as the final result from fuzzy fusion decision.

Damage relational degrees of element by matter-element method.
Damage simulation is carried out for element 105, and 2 of training samples are simulated for each damage grade in Table 1, and the normal output of FNN for different damage grades is listed in Table 3. A four inputs and one output fuzzy neural network is established based on the training samples, in which there are four Gaussian membership functions for each input, the network topology of the FNN model is shown in Figure 6. All the 80 samples are input to the neural network is trained to generate the fuzzy neural network. On the other hand, another new 30 test samples, which include the actual damage vector [9.17, 0.0018, 0.5, 0.38], are used as the input to verify the accuracy. The Root-mean-square error during training and test is shown in Figure 7 and the membership grade of deflection variation after training by FNN is shown as Figure 8. The output curve is shown as Figure 9, and the output is 0.520, belong to the medium damage range. It shows that fuzzy neural network also apply to structural damage information fusion and has certain reasoning prediction function.
Normal output of FNN for different damage grade.


The network topology of the FNN model.
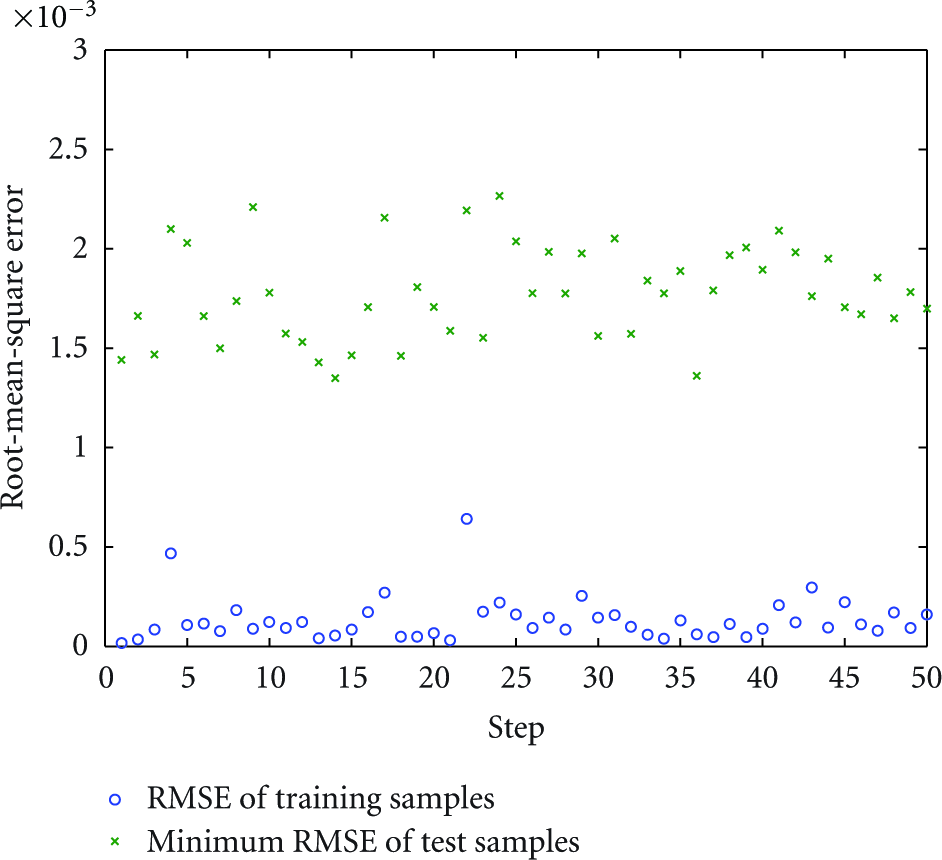
Root-mean-square error during training and test.
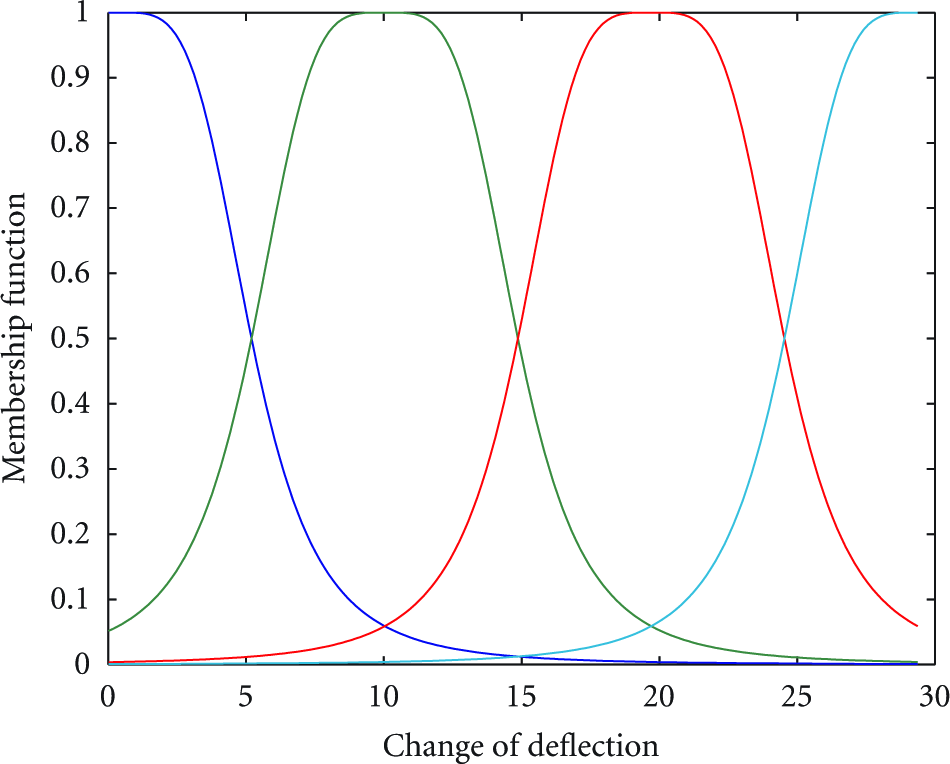
Membership grade of deflection variation after training by FNN.

Output curve of FNN.
7. Conclusion
Structural health monitoring is a multidisciplinary and integrated technology, especially applied in complex civil engineering. For a SHM system, various types and large number sensors are used, since the damage and status change is hard to be detected only by one type of sensor and few method, the damage information fusion is a critical need for SHM system. The damage information fusion includes data level fusion, feature-level fusion and decision-level fusion. The data level fusion is solved by the statistic method, signal filter technology and other preliminary method. For feature-level fusion, the integrated damage diagnosis matrix is presented and the concept of damage self-information and damage information entropy is defined, and the information for different sensors belong to the same type is integrated to detect the damage degree for one target or component. For decision-level fusion, three methods based on fuzzy set theory, matter-element theory and fuzzy neural network, respectively, is presented. All the method can obtain a final result by the different information from various types of sensors. A single-layer spherical lattice dome is studied in order to validate the information fusion methods in this paper. The result shows that all the information fusion methods have high accuracy and feasibility.
Footnotes
Acknowledgments
This work is partially supported by Natural Science Foundation of China under Grants nos. 51108009 and 50878010 and Foundation of the Ministry of Education of China for Outstanding Young Teachers in University under Grant no. 20111103120022.