
Abstract
Routing and spectrum allocation is an important challenge in cognitive wireless mesh networks. A distributed routing and spectrum allocation algorithm with cooperation (DRSAC-W) in cognitive wireless mesh networks is proposed in this paper. In order to show the decrease of the average end-to-end delay with cooperation in DRSAC-W, a distributed routing and spectrum allocation algorithm without cooperation (DRSAC-WO) is proposed in this paper. Minimizing the average end-to-end delay is the objective of DRSAC-W and DRSAC-WO. Simulation results show that the proposed algorithm DRSAC-W with cooperation can alleviate the high delay due to the heterogeneity of available channels of different nodes and achieve low average end-to-end delay.
1. Introduction
The scarcity of spectrum resource is often thought to be a bottleneck in wireless mobile communications. Cognitive radio (CR) is intelligent revolutionary spectrum (channel) sharing technology and the most important new wireless technology today. The core function of CR is that it can sense the vacancy spectrum resources and share these unused spectrum resources [1]. Secondary users (SU) can use the authorized spectrum which primary users (PU) did not use [2, 3].
A cognitive wireless mesh network (CWMN) is a wireless mesh network which integrates CR technology [4, 5]. A CR-Mesh node (such as a CR-Mesh gateway, a CR-Mesh router, or a CR-Mesh client), which integrates CR technology, can sense the spectrum which PU are not using and access the vacancy spectrum resource.
Wireless mesh networks (WMN) are a type of next generation broadband wireless access networks. There are many challenge problems in wireless mesh networks. Recently, there are some research results about routing and channel allocation [6–10]. However, research results of routing and channel allocation in WMN cannot be applied to CWMN directly, because the problem of routing and channel allocation in a CWMN has the following characteristics. (1) The routing protocol of WMN uses static channel, while the routing protocol of a CWMN must utilize dynamic channels. (2) The CR-Mesh node uses the allocated spectrum which the PU did not use; hence, the CR-Mesh node must ensure that it does not interfere with the communication of the PU. (3) The channels available to a CR-Mesh node are a subset of all available channels, and this subset changes over time in a CWMN. (4) There are heterogeneity available channel sets among different CR-Mesh nodes in a CWMN. (5) There are differences among the different channels, due to the activity of PU.
At present, the research about CWMNs is at an early stage. There are many open challenges [11] in CWMN. Although for the routing and spectrum allocation problems, there are already some research results [12–19].
An improved layered AODV route protocol in cognitive wireless mesh networks was proposed by Tingrui et al. [12]. An AODV-COG route protocol based on AODV protocol was proposed by Sun et al. The objective of AODV-COG is to increase the throughput of a CWMN [13]. An economic framework for adaptation and control of the network resources with the final goal of the network profit maximization was proposed by Amini and Dziong [14]. A multisource video on-demand application over a multiinterface cognitive wireless mesh networks was studied by Yong Ding with the objective of maximizing the number of sessions of the network. A distributed multipath routing and spectrum allocation algorithm (DRCA) and a centralized multi-path routing and spectrum allocation algorithm (CRCA) were proposed by Ding and Xiao [15]. Lee et al. aim at solving the problem of coexistence of CWMN and other wireless networks, in order to share spectrum among multiple wireless networks. A route and spectrum allocation algorithm with the objective of minimizing the used spectrum was proposed [16].
With the optimization of average throughput and average delay, a distributed routing and channel allocation was proposed by Zhang et al. [17]. A multi-path routing and channel allocation strategy was proposed by Gu et al., with the goal of optimizing average throughput and average delay [18]. A dynamic layered-graph routing model and routing policy for CWMN were proposed by Li et al. [19].
The problem of routing and spectrum allocation with node cooperation is studied in this paper. We aim to minimize the end-to-end average delay.
This paper offers the following innovations when compared to existing research. (1) The effect among multiple wireless requests is taken into account, in order to minimize the average end-to-end delay. (2) The different wireless channels have different transmission characteristics, with delay being one of the most important of these characteristics. (3) DRSAC-WO, a distributed routing and spectrum allocation algorithm without cooperation, and DRSAC-W, a distributed routing and spectrum allocation algorithm with cooperation, are proposed in this paper.
The remainder of the paper is organized as follows. We discuss the network model and problem description in Section 2. In Section 3, we describe the proposed DRSAC-WO and DRSAC-W algorithms. Simulations comparing the performance of the proposed algorithms are presented in Section 4. Section 5 concludes the paper and outlines our future work.
2. Network Model and Problem Description
2.1. Network Model
We adopt a simple undirected graph
There is interference between wireless links
Symbol implication.

2.2. Problem Description
We study the problem under the condition of heterogeneous available channels, and the route from source node to destination node is constructed distributedly. We aim to minimize the average end-to-end delay.


A simple topology is considered. This topology is shown in Figure 1. There are 2 CR-Mesh gateways, and 10 CR-Mesh router nodes. CR-MR4
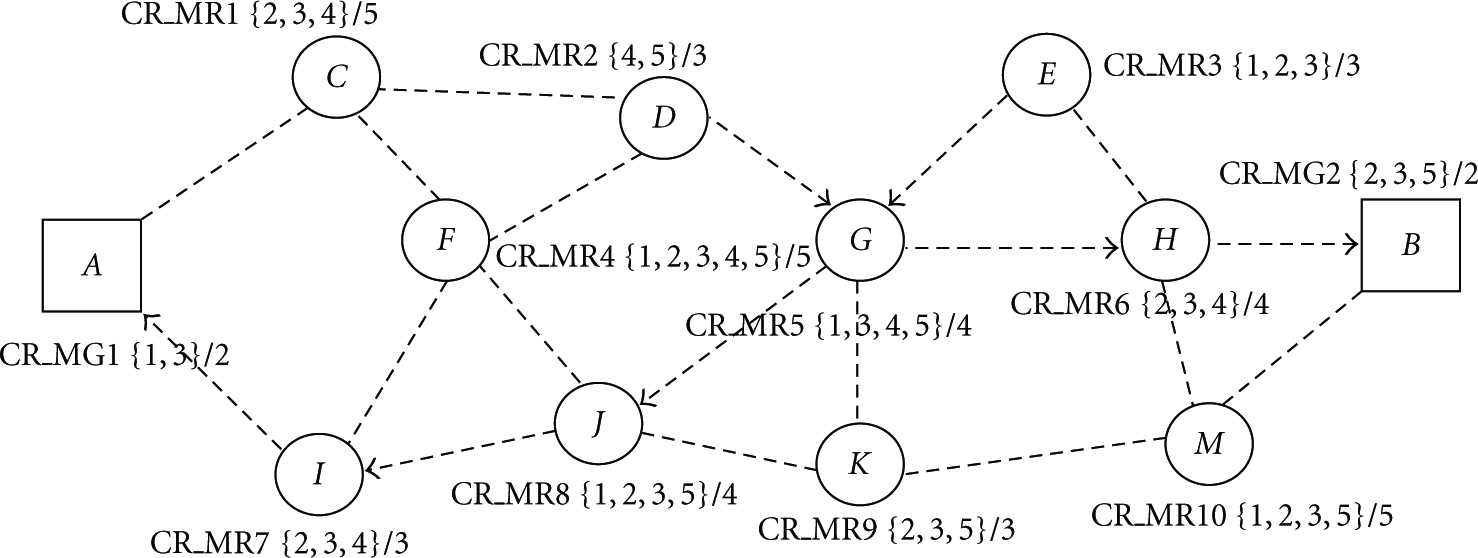
Cognitive wireless mesh network topology.

Path and delay without cooperation.

Table 3 shows the constructed paths and allocated spectrum with cooperation. The delays are 
Path and delay with cooperation.

The wireless request
With cooperation, the channel allocated to the wireless link
The claim of this paper is that making these types of choices will minimize the average end-to-end delays for all requests in the network.
3. Distributed Routing and Spectrum Allocation Algorithm
DRSAC-WO, a distributed routing and spectrum allocation algorithm without cooperation, and DRSAC-W, a distributed routing and spectrum allocation algorithm with cooperation, are proposed in this paper. In order to show the decrease in average end-to-end delay when there is node cooperation, we compare the two algorithms. The InitCRNode algorithm is common to both DRSAC-WO and DRSAC-W algorithms.
3.1. InitCRNode Algorithm
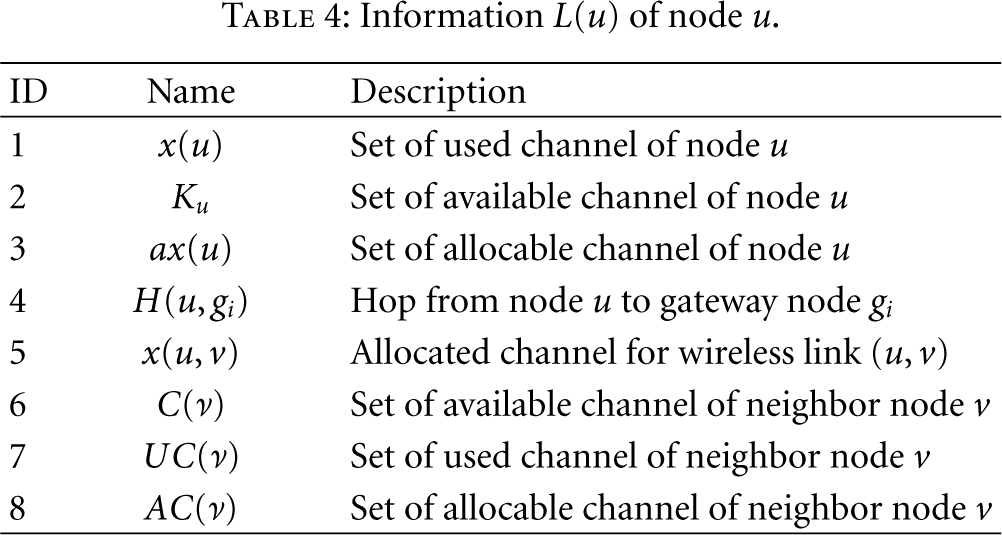
InitCRNode algorithm initializes all CR-Mesh nodes of the CWMN. The initialization constructs the neighbor node list, available channels of each neighbor node, and the hop count to CR-Mesh gateway node.
We must do some parts of this computation with a centralized algorithm rather than a distributed algorithm However, the choice of path to the gateway is based upon local information.
Information
The following formulas show how to compute 

Input: Output: 1. 2. if u is GW node { 3. 4. 5. Broadcast 6. Exit } 7. else if u is MR node { 8. 9. While ( 10. if (u receives 11. 12. 13. 14. 15. 16. if 17. Init Timer 18. 19. 20. 21. 22. Boardcast
3.2. DRSAC-WO Algorithm
DRSAC-WO is a distributed routing and spectrum allocation algorithm without cooperation.
3.3. DRSAC-W Algorithm
DRSAC-W is a distributed routing and spectrum allocation algorithm with cooperation. The difference between the DRSAC-W and DRSAC-WO is (1) adding a cooperation request strategy to Algorithm 2 between line 16 and line 17 to DRSAC-W and (2) adding the cooperation response strategy for the neighbor node of node u to DRSAC-W.
Algorithm 3 shows the cooperation request strategy of node u, while Algorithm 4 shows the cooperation response strategy of node v which is the neighbor of node u.
Input: Output: 1. Send 2. Init Timer 3. while ( 4. if (u receives 5. Cancel timer 6. Boardcast 7. 8. 9. 10.
Input: Output: 1. if (v receives 2. Compute 3. Compute 4. 5. 6. for each 7. For each 8. if 9. Compute 10. 11. 12. 13. if 14. 15. 16. 17. 18. Send 19. 20.
The following formula shows the sum of delays for all edges in the network:

Before adjusting the channel,
4. Simulation and Results
In order to validate the efficiency of the algorithms proposed in this paper, we implemented the DRSAC-W, DRSAC-WO, and DRCA [15] algorithms using NS-2 [20].
The network topology that was simulated corresponds to the wireless access network of a university. There are some available channels in 2000 m × 2000 m area. The PU uses the channel stochastically with
There are two network topologies with different numbers of nodes:
The simulation results that we report are the average of 500 simulation runs. The performance parameters that we report are the average end-to-end delay and average throughput.
The simulation considers the following two aspects (1) Analyzing the performance of DRSAC-WO, DRSAC-W and DRCA with different numbers of requests. (2) Analyzing the performance of DRSAC-WO, DRSAC-W and DRCA with different numbers of available channels.
4.1. The Performance Comparison with Different Numbers of Requests
We analyse the performance of algorithms with different numbers of wireless requests. Figures 2 and 3 show the simulation results.

Average end-to-end delay with different numbers of requests.

Average throughput with different numbers of requests.
We can see from Figure 2, as the number of requests increases the average end-to-end delay increases for all three algorithms. This is because the available network resources do not change despite the increased number of wireless requests. Therefore, the average end-to-end delays increase. The average end-to-end delay of DRSAC-W and DRSAC-WO algorithm are less than for the DRCA algorithm. This is because DRSAC-W and DRSAC-WO algorithms choose the node, which has the lowest delay common channel as the next hop. Unlike our goal of minimizing the average end-to-end delay, minimizing the sum of bandwidths of each session is the goal of DRCA algorithm. Furthermore, the average end-to-end delay of DRSAC-W is less than that of the DRSAC-WO. This is because that the DRSAC-W algorithm reduces the average end-to-end delay due to node cooperation.
We can see from Figure 3, as the number of requests increases, the average throughput of all three algorithms deceases. This is because the available network resource does not change despite the number of wireless requests increasing. Additionally, the average throughput of DRSAC-W and DRSAC-WO algorithms is greater than is DRCA algorithm. The average throughput of DRSAC-W and DRSAC-WO iss the same. This is because that the difference between DRSAC-W and DRSAC-WO is that DRSAC-W algorithm adopt the node cooperation in order to decease end-to-end average delay.
4.2. The Performance Comparison with Different Numbers of Available Channels
We analyse the performance of the three algorithms with different numbers of available channels via simulation. Figures 4 and 5 are the result of averaging the result of 500 simulations, when the number of wireless requests in each 200 second simulation run was 30.

Average end-to-end delay with different numbers of available channels.

Average throughput with different numbers of available channels.
We can see from Figure 4, as the number of available channels increases, the average end-to-end delay of all three algorithms decreases. This is because that the number of wireless requests did not change while the number of available channels increased. The average end-to-end delay of DRSAC-W and DRSAC-WO algorithms was less than for the DRCA algorithm.
We can see from Figure 5, as the number of available channels increase, the average throughput of all three algorithms increases. Although, the average throughput of the DRSAC-W and DRSAC-WO algorithm is greater than for the DRCA algorithm. There is no difference between the DRSAC-W and DSRAC-WO algorithms.
5. Conclusion
The problem of routing and spectrum allocation with the goal of minimizing end-to-end average delay is researched in this paper. A distributed routing and spectrum allocation algorithm without cooperation and a distributed routing and spectrum allocation algorithm with cooperation are proposed in this paper. Simulation results show that DRSAC-W and DRSAC-WO algorithms can achieve low average end-to-end delay and high average throughput. The average end-to-end delay of DRSAC-W is less than DRSAC-WO, showing that the average end-to-end delay deceases with node cooperation. The problem of load balanced of routing and spectrum allocation will be addressed in our future work.
Footnotes
Acknowledgments
The authors would like to thank the reviewers for their detailed comments that have helped to improve the quality of the paper. This work is supported by National Natural Science Foundation of China under Grants no. 61073186, 61073104, 61070169, and 61170021; Natural Science Foundation of Jiangsu Province under Grant no. BK2011376; Specialized Research Foundation for the Doctoral Program of Higher Education of China no. 20103201110018.