
Abstract
If a wireless sensor network (WSN) is deployed in a hostile environment, the intrinsic limitations of the nodes lead to many security issues. In this paper, we address a particular attack to the location and neighbor discovery protocols, carried out by two colluding nodes that set a wormhole to try to deceive an isolated remote WSN node into believing that it is a neighbor of a set of local nodes. To counteract such threat, we present a framework generically called detection of wormhole attacks using range-free methods (DWARF) under which we derive two specific wormhole detection schemes: the first approach, DWARFLoc, performs jointly the detection and localization procedures employing range-free techniques, while the other, DWARFTest, uses a range-free method to check the validity of the estimated position of a node once the location discovery protocol is finished. Simulations show that both strategies are effective in detecting wormhole attacks, and their performances are compared with that of a conventional likelihood ratio test (LRT).
1. Introduction
Wireless sensor networks (WSNs) are composed of a potentially large number of low-cost and resource-constrained devices which are often distributed over a wide area. Thus, if a WSN is deployed in an unfriendly environment, providing security to the involved network protocols is a challenging task that usually requires the use of different combined strategies [1].
A protocol that deserves special attention from a security point of view is neighbor discovery (ND). This is because one of the most basic requirements in a WSN is the ability of every node to reliably determine which of the other nodes are within its radio range so that it can establish single-hop links with them. Trustworthy ND is a cornerstone for securing higher-level network protocols and system functionalities, such as physical and network access control, data routing, and node localization [2].
In a hostile environment, a WSN can be compromised by different threats, but the so-called wormhole or relay attack lies among the most devastating [3]. A wormhole is a high-speed direct communication link between two malicious nodes that act in collusion by capturing network packets on one end, sending them through the wormhole and replaying them at the other end. Thus, to launch a wormhole attack, an adversary does not need to infect any network node or break any cryptographic system, making it a quite severe threat to WSNs.
Wormholes completely distort the network topology, making distant nodes to appear as local for a given node looking for its neighbors. As a side effect of a failed ND due to a wormhole, most location discovery (LD) protocols will also be compromised; this is because the wormhole severely distorts all the measurements related to the relative positions of the nodes. However, in some cases, the high sensitivity of LD protocols to wormholes can be turned into an advantage, because the localization process can be suitably modified to detect the presence of an attack.
In this paper we address this approach for the detection of wormholes. Specifically, we propose a general framework called detection of wormhole attacks using range-free methods (DWARF) that has two modes of operation: the first one (DWARFLoc) performs the detection of a wormhole simultaneously with the localization procedure, while the second one (DWARFTest) is a postlocalization detector that tries to validate the node position after this latter is obtained. The principles of DWARF are rooted in the exploitation of the ideas underlying the operation of a range-free localization method, namely, the so-called “sensor localization with Ring Overlapping based on Comparison of Received Signal Strength Indicator” (ROCRSSI) algorithm [4].
The main contributions of this paper are as follows.
The formulation of a simplified attack model for which the detection of a wormhole can be rigorously formulated as a binary hypothesis testing problem.
The derivation of the likelihood ratio test (LRT) as the asymptotically optimal solution for the wormhole detection problem. However, the LRT requires a precise statistical model for the observations.
The derivation of DWARFLoc and DWARFTest as robust alternatives to the LRT, because they are not tied to any particular channel model.
The evaluation of the relative performances of both categories of tests (LRT and DWARF) through simulations.
The rest of the paper is organized as follows. Section 2 reviews related work concerning wormhole detection. Section 3 presents basic ideas about range-free localization and briefly describes the ROCRSSI algorithm. Section 4 defines the particular attack to be counteracted. Section 5 formulates the wormhole detection problem under the framework of statistical hypothesis testing and derives the LRT. Section 6 presents the two wormhole detection strategies DWARFLoc and DWARFTest. Section 7 evaluates the performance of the different wormhole detection strategies through simulations. Finally, section 8 draws some conclusions.
2. Related Work
In recent years, the topic of secure ND has been extensively studied and a lot of different defensive measures against wormhole attacks are described in the related literature.
For instance, it is proposed in [3] the use of location and time stamps, that is, geographical and temporal “leashes”, attached to network packets to detect wormhole attacks; therefore, this strategy assumes that all the nodes know their exact positions and are synchronized in time, which are probably unrealistic hypotheses if the network is under attack.
In [5], a wormhole detection algorithm for a multihop wireless network is presented, based on a search of forbidden substructures in the connectivity graph.
The authors of [6] present different preventive mechanisms against wormholes and propose an intruder detection system, LIDeA, in which every node analyzes their neighbors and collaborates to detect suspicious nodes using a voting strategy.
In [7], the authors introduce a graph-based and beacon-less solution that detects wormholes visually by reconstructing the network topology using only inaccurate distances between the nodes; however, an irregular-shaped network or multiple wormholes may lead to an incorrect detection.
The cryptographic concept of “pairing” is introduced in [8]. The article describes a node-to-node neighborhood authentication protocol based on location-based keys (private keys of individual nodes that are bound to their identities and positions), to avoid malicious nodes to join the network.
Wu et al. [9] propose a localization scheme based on hop counts (DV-Hop) by labeling the neighboring nodes of beacon nodes according to different algorithms to detect wormhole attacks; nevertheless, the proposed scheme does not work well if the network has packet losses or the transmission ranges of all nodes are not identical.
Robust localization techniques were described in [10, 11], using the concept of “verifiable multilateration.” Both are range-based approaches: while ROPE [10] provides secure localization and location verification using directional antennas and distance bounding, SPINE [11] estimates the distances between the nodes by measuring the time of flight of the radio signal. These solutions require either perfectly known directional antennas or specific transceivers capable of measuring the time of flight.
A secure range-free localization method called SeRLoc was proposed in [12], where the nodes are supposed to be equipped with static directional antennas with a fixed communication range, the nodes are localized by overlapping regions within communication range, and the wormholes are detected by checking the properties of message uniqueness and communication range violation. HiRLoc [13] is the evolution of SeRLoc and provides a high-resolution localization by adding two variables to the localization algorithm, the angle of rotation of the antennas, and the transmission power, increasing the complexity of the nodes.
Recently, ConSetLoc [14] proposes a robust range-free localization scheme based on evaluating the relationship between hops and distances and then applying convex constraints in geometry to reduce localization errors induced by wormholes.
For moving nodes, a secure ND protocol called MSDN [15] has been proposed, applying the notion of graph rigidity to aid moving network nodes in the verification of neighbors.
All the procedures for secure ND described above assume that the two colluding nodes forming a wormhole are located within the network deployment area. However, as we will see in Section 4, the particular threat we will address in this paper assumes that one of the wormhole nodes is situated out of the range of the WSN nodes but in the vicinity of an isolated node which is the target of the attack. So, this particular wormhole attack to the LD and ND protocols cannot be detected by conventional techniques.
3. Range-Free Localization
Traditional localization techniques rely on providing network nodes with auxiliary devices capable of self-acquiring their coordinates in a geographical reference system, such as global positioning system (GPS) receivers. Such solutions, however, have severe drawbacks in terms of their cost and energy consumption and are unable to operate indoors. A much more flexible approach to LD is obtained if we assume that only a small number of network nodes are assumed to know their own locations (through GPS receivers or system configuration), while the other nodes are only able to measure their relative distances to other neighbor nodes and use these data to position themselves. Focusing on the physical layer (PHY) level, received signal strength (RSS) is a parameter readily available in most commercial sensor nodes, usually in a coarsely quantized form called RSS indicator (RSSI). RSS measurements can be used for localization, because they are related to the distances between nodes [16, 17]; however, as they strongly depend on the particular hardware used and also on often unpredictable environment conditions, in many cases they cannot be used to directly estimate distances. Therefore, in recent times several “range-free” alternatives to localization have been proposed; these methods use an indirect approach and provide localization without the need of accurate distance estimations.
We point here that there is some controversy regarding the expression “range-free” when applied to localization because, for some authors, this term only refers to techniques based on connectivity information, which can be interpreted as a binary quantization of RSS. We will, however, adopt a broader interpretation of “range-free” schemes as those that use RSS values but do not rely on the existence of any precise relationship between RSSs and distances, only assuming there is a loose link between these parameters [18]. We will also call these methods “nonparametric,” as opposed to “parametric” or “range-based” approaches, which require a precise model relating RSS values to distances.
For instance, if we denote the Euclidean distance between two arbitrary network nodes at positions

Notice that because the transmitted power is assumed to be unknown, RSS measurements are not expected to be symmetric that is,
This range-free localization method assumes that there is a node trying to estimate its own unknown position
One anchor-to-node RSS:
Now, by applying the monotonicity constraint (1) to this set of RSS measurements, the localization algorithm obtains the tightest possible lower and upper bounds,

with
where
After repeating this procedure for all the anchors, the node is found to be located on the intersection of a set of rings
With actual measurements, the condition (1) does not hold for every pair of nodes because the radio channel is usually anisotropic, so that not all the rings (2) have a common intersection. The compromise solution in such cases is to assume the UN to be in the region of the plane where most of the rings intersect. This is equivalent to assume that every anchor “votes” for a given ring as a candidate to hold the UN, and the region of the plane that gets the higher number of votes is finally elected. Such voting strategy has the added benefit of providing a good degree of robustness to attacks to the localization process triggered by malicious anchors [19, 20].
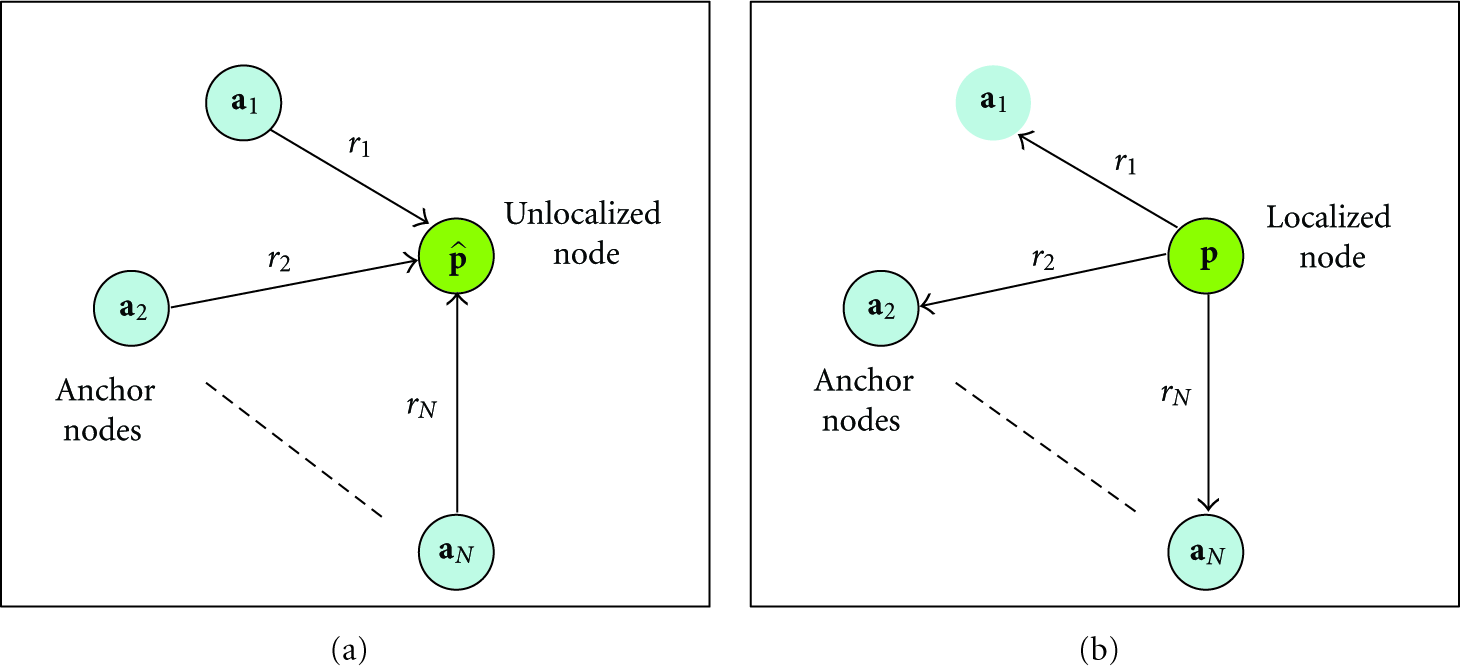
On the other hand, the achieved number of votes (i.e., intersecting rings) for the region of the plane finally elected is also an indicator of the “degree of success” of the localization process: a high value for this number (relative to its absolute maximum, i.e., the number of anchors N) implies that RSS measurements are highly correlated to actual distances between nodes, so that the monotonicity constraint (1) is fulfilled in most situations. This fact is illustrated in Figure 1, where we can see examples of two extreme cases: Figure 1(a) represents the distribution of the number of votes when the node to be located receives RSS measurements that are independent of distances, while Figure 1(b) illustrates a situation where RSSs are deterministically related to distances; notice the presence of a sharp peak in this latter case, highlighting the area where the node is located.

Spatial distributions of the number of intersecting rings with
The ROCRSSI algorithm, unlike other range-free approaches, does not require any special hardware at the nodes (like directive antennas) and its implementation does not depend on parameters that are somewhat imprecisely defined such as the “communication range,” commonly employed by range-free methods based on connectivity.
4. Attack Model
We will assume the existence of an adversary who tries to deceive both the location and neighborhood discovery protocols by forcing a remote compromised node to appear as a neighbor of the local network nodes. To accomplish this, the attacker uses a wormhole link with two endpoints: one in the vicinity of the anchor nodes, and the other within the radio range of the compromised node (see Figure 2); the wormhole local node captures beaconing packets sent from the anchor nodes and tunnels them to the wormhole remote node through a dedicated high-speed link, so that they arrive unmodified at the compromised node. This latter node, then, applies the localization procedure using these packets as if they came directly from the anchors, therefore resulting in a fake position within the deployment area of the local network. As the wormhole nodes act as simple relays and do not manipulate the information contained in the packets, wormhole attacks resist defensive measures solely based on cryptographic protocols.

Wormhole attack to location and neighbor discovery.
Once the compromised node is falsely positioned, the network can become vulnerable to different exploits. For instance, the compromised node could inadvertently inject misleading information into the local network or obtain sensitive data from other nodes and flow them through the wormhole link. Another possibility for an adversary comes from the fact that the wormhole local node can be easily masqueraded as an authenticated local node by impersonating the compromised node; in this way, anyone who physically bears the wormhole local node could gain access to restricted areas or secret information [2].
The model of Figure 2, in spite of its simplicity, captures the essential mechanism of a wormhole attack to LD and ND protocols. Ironically, however, most existing wormhole detection schemes cannot cope with this simple attack for several reasons as follows.
The simple scenario of Figure 2 assumes that in a normal situation (no attack), all the active nodes are neighbors; this precludes the use of secure LD or ND techniques solely based on connectivity information or hop counts. Obviously, methods for wormhole detection based on the analysis of “network layer” parameters (routes, traffic, etc.) are also inapplicable.
The compromised node only communicates with the remote wormhole node, so it cannot get cooperation from “real” neighbors in the localization process or the detection of the attack.
A wormhole attack is undetectable by “network-based” localization techniques [21]: if the position of the node is obtained from signals received by the anchors, the compromised node will be always located at the position of the wormhole local node. Therefore, the LD procedure should be performed at the unlocalized node, using data it received from the anchors, because the unlocalized node is the only one that can detect inconsistencies caused by a wormhole attack.
On the other hand, the model of Figure 2 is simple enough to allow the application of standard tools of statistical decision theory to the problems of node localization and wormhole detection.
As a wormhole attack challenges higher-level protocols, most effective procedures to detect such attacks are based on looking for inconsistencies in measurements performed at the physical layer level. In the next sections, we develop different detection strategies that analyze the RSS values measured by the nodes interacting in the localization procedure.
5. Wormhole Detection Using RSS: Parametric Approach
Any wormhole detection procedure can be stated as a binary hypothesis testing problem: given a vector of N RSS observations

where

Now, assuming that the observations are independent and identically distributed (IID), the distribution of

where the superscript T denotes “transpose.” The assumption of IID observations is valid whenever they are associated to transmitters and/or receivers located at different positions and shadow fading is spatially uncorrelated.
According to (5), the only parameter of (6) that depends on the position is

where
Now, depending on the origin of the measurements, we can define two different tests. The first one is carried out by the unlocalized node, which performs the localization and wormhole detection processes simultaneously, using RSS values obtained from packets supposedly transmitted by the anchors. The second strategy can be applied after the node is localized and is performed by the anchors, which analyze the RSS measurements obtained from packets supposedly transmitted by the localized node. Both schemes are presented in Sections 5.1 and 5.2, respectively.
5.1. Simultaneous Localization and Wormhole Detection: Likelihood Ratio Test
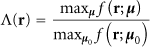
In this scheme, the anchors broadcast beaconing packets containing their positions, conveniently enciphered and authenticated to prevent other kinds of attacks. These packets are intended to be received by the unlocalized node, which measures their RSS values and then decrypts them to obtain the positions of the anchors. As stated previously, assuming that the statistical model for the RSS observations (6) is valid, then the wormhole detection procedure can be formulated as a hypothesis testing problem of the form (7), where the measurements
Therefore, if the hypothesis

and according to (5), the elements of vector

Scenarios for secure neighbor discovery assuming no wormhole is present. (a) Simultaneous localization and wormhole detection. (b) Wormhole detection after localization.
However, under
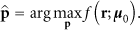
Notice that, as the position of the node

where
and η is a threshold selected so that we have a given probability of false alarm (PFA). Taking into account (6) and (9), we have

with

The numerator of (11) is easily obtained, according to (6), as

while the denominator of (11) is, according to (12),

where
Taking into account the inverse relationship between

so that
Now, taking into account (11), (14), and (15), we can compute the logarithm of the likelihood ratio as

so that a test equivalent to (10) is

where

with
Set of trustworthy anchor positions: Set of untrustworthy anchor to node RSSs: Parameters of the path-loss model: K and α. Detection threshold:
(1) Obtain (2) Compute the test statistic (3) (4) (5) (6) (7) (8)
We can see from (13) that
5.2. Wormhole Detection after Localization: Likelihood Ratio Test
Another wormhole detection strategy could be implemented after a given node has completed the localization procedure, and as a result of this, it has obtained a position within the local network deployment area. The idea now is to use the anchor nodes to check the validity of the node location.
To accomplish this, the localized node broadcasts cryptographically secured packets containing its position

and according to (5) and taking into account that
On the other hand, under
Therefore, the only difference with the previous case is that now the position of the node
where
Following analogous steps to the previous section, we arrive at a test similar to (19) but using the reported position instead of the MLE (see Algorithm 2):

where

Again, the test statistic
Set of trustworthy anchor positions: Untrustworthy node position: Set of untrustworthy node to anchor RSSs: Parameters of the path-loss model: K and α Detection threshold:
(1) Obtain the anchor to node distances (2) Compute the test statistic (3) (4) (5) (6) (7) (8)
6. Wormhole Detection Using RSS: Nonparametric Approach
The detection strategies of Section 5 assume the existence of a well-defined measurement model that describes the statistical relationship between observed RSS values and distances. However, in most instances, such model can only be stated under idealized conditions or is tied to a specific scenario; in this latter case, estimating its parameters often requires a costly calibration phase which must be repeated every time the environmental conditions change.
Therefore, it would be desirable to devise wormhole detection procedures that are “nonparametric” in the sense that unlike the test (7), these strategies do not impose a particular distribution for the observations; thus, such tests will be robust against departures from any predefined model. In particular, we will base our derivations of nonparametric detection schemes on the underlying ideas of the range-free positioning techniques described in Section 3.
As above, depending on the source of the measurements, we will derive a procedure for simultaneous localization and wormhole detection performed by the unlocalized node, using RSS values obtained from packets transmitted by the anchors, and a postlocalization wormhole detection scheme performed by the anchors, employing RSS measurements obtained from packets transmitted by the localized node. Both schemes are presented in Sections 6.1 and 6.2, respectively.
6.1. Simultaneous Localization and Wormhole Detection: DWARFLoc
We can check the presence of a wormhole without assuming any specific model for the observations by exploiting the fact that under no attack, the RSS values collected by the unlocalized node will be related to the distances from the node to the anchors, no matter which is the exact form of this relationship; on the other hand, if a wormhole is present, the RSS values measured by the compromised node are totally unrelated to its actual position.
Thus, under a wormhole attack and assuming that the compromised node uses the ROCRSSI scheme described in Section 3 to localize itself, it is very unlikely for the rings provided by the anchor nodes to share a common intersection, even in the absence of measurement errors; so, if a voting strategy is adopted to estimate the unknown node position, the number of votes received by any region in the plane will be well below the maximum attainable score (see Figure 1(a)). On the other hand, if no wormhole is present, we should expect that most anchors agree on the existence of a region of the plane that satisfies the set of constraints (2); this region, therefore, will receive a high number of votes (relative to the number of anchors), as Figure 1(b) illustrates. For these reasons, the test statistic proposed for this nonparametric detection strategy is the deviation of the maximum number of votes attained by any region of the plane from the average number of votes.
Therefore, in this scheme the anchor nodes broadcast beaconing packets that contain their positions and the RSSs they measure for packets transmitted by other anchor nodes; such packets should be conveniently enciphered and authenticated. Then, the unlocalized node collects and decrypts the beaconing packets and computes RSS values for them (see Figure 3(a)); these measurements, along with the positions of the anchors and the anchor-to-anchor RSSs, are used to estimate the position of the node, via the ROCRSSI method. The quality of the estimated position is determined by the number of votes it received, and if this number (after mean centering) is above a predefined threshold, the localization process is considered valid; otherwise, an attack is presumed and the unlocated node refrains from joining the network. As usual, the detection threshold is selected to obtain a given PFA. The whole DWARFLoc procedure is described in Algorithm 3.
Set of anchor positions: Set of untrustworthy anchor to node RSSs: Set of trustworthy anchor to anchor RSSs: Detection threshold: η
(1) Define a grid (2) (3) (4) Obtain a ring (5) (6) (7) Increment counter of votes for point (8) (9) (10) (11) Obtain the intersection region as the set of grid points with maximum number of “votes”: (12) Estimate the position of the node as the centroid of the intersection area: (13) Compute the sample mean of the number of votes: (14) (15) (16) (17) (18) (19)
6.2. Wormhole Detection after Localization: DWARFTest
Once the node is successfully located, we can proceed to verify the validity of the node position
As a measure of dissimilarity between distances and RSS measurements, we have used a slight modification of the classical Kendall tau distance [26], which is a metric that counts the number of pairwise disagreements between two lists. In our case, the test statistic counts the number of violations of the monotonicity constraint (1) for every possible pair of node-to-anchor distances and their corresponding measured RSS values as

where
As the test statistic

where
Set of trustworthy anchor positions: Untrustworthy node position: Set of untrustworthy node to anchor RSSs: Detection threshold and “PFA adjustment” parameter:
(1) Obtain the node to anchor distances (2) Compute the test statistic (3) (4) (5) (6) (7) (8) (9) (10)
7. Simulation Results
We have conducted some simulations to evaluate and compare the performance of the wormhole detection strategies described in Sections 5 and 6. The simulated WSN is composed of a set of anchor nodes whose positions are uniformly distributed in a square room of 20 m × 20 m. For RSS values, we have assumed the log-distance path-loss model (4) for which we set
The range-free localization scheme uses a square grid of
A wormhole attack is simulated according to the model of Figure 2. The distance between the wormhole remote node and the compromised node,

where
Once the node has been located, the detection procedures of Sections 5.2 and 6.2 are started and the tested node begins to broadcast its estimated position. However, according to Figure 2, if this node has been compromised by a wormhole attack, the RSS values measured by the anchors are related to their distances to the wormhole local node, because this node is acting as a repeater.
To determine the detection thresholds for the tests, we have also simulated the scenarios of Figure 3, using a reference node whose position is uniformly distributed in the WSN deployment area. Then, for each of the four tests, the empirical cumulative distribution function (CDF) of the test statistic is used to obtain the critical value that ensures a given PFA.
Some results are represented in Figures 4 and 5, where we have plotted the attained probability of detection for the wormhole detection schemes of Sections 5 and 6 under different situations. The PFA is fixed at 0.05 and we conducted 1000 simulation runs in all cases.

Probability of wormhole detection for the proposed strategies with varying number of anchor nodes (
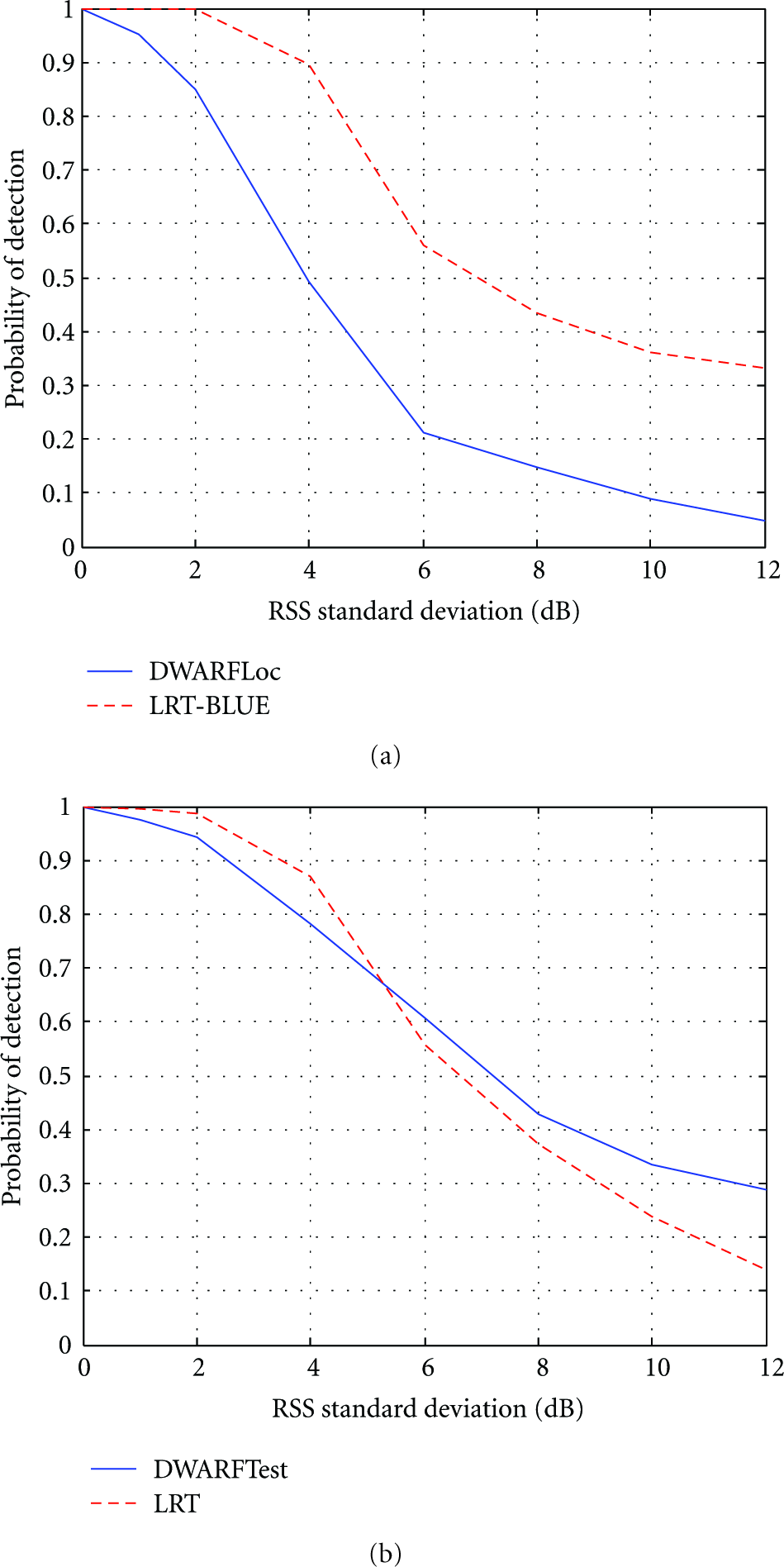
Probability of wormhole detection for the proposed strategies with varying path-loss standard deviation (
By examining Figures 4(a) and 5(a), we can observe that the parametric approach for simultaneous wormhole detection and localization (LRT-BLUE) performs clearly better than the range-free procedure (DWARFLoc); this was expected, because range-free localization methods do not use a priori information about any model for the RSS observed values. However, we can see form Figures 4(b) and 5(b) that the range-free version of the scheme for detection after localization (DWARFTest) competes in performance with its parametric counterpart (LRT) and even surpasses it for high values of the path-loss standard deviation; this is attributable to the rapid degradation of the BLUE estimator when the RSS measurements are subject to significant errors.
8. Conclusions
In this paper we presented a minimalist model for a wormhole attack to a WSN that can be effectively counteracted by two different detection procedures, based on the underlying ideas of RSS-based range-free localization methods. The first one (DWARFLoc) operates simultaneously with the localization procedure, and the second one (DWARFTest) is a postlocalization detector that tries to validate a posteriori the estimated node position. Simulations suggest that DWARFTest has much better detection performance than DWARFLoc but requires more transmissions to be carried out.
Furthermore, assuming that the RSS values follow the standard log-normal path-loss model, we have also derived exact likelihood ratio tests for the detection of a wormhole, which can be used as benchmarks for any other detection scheme.
Footnotes
Acknowledgments
This research was partially supported by the Spanish Ministry of Science and Innovation under Grant TEC2009-14219-C03 (AMURA) and the European Commission under Grant FP7-ICT-2009-4-248894 (WHERE2).