
Abstract
This paper addresses the problem of coordinating the motion of the nodes in a mobile sensor network for area coverage applications under RF communication limitations. During network evolution, the area sensed by the network increases until it reaches optimum configuration, while information for decision making is acquired distributively among the nodes via a prespecified number of hops. Unlike previous works, radio range is not demanded to be at least twice the sensing range, imposing an extra constraint in the overall problem setup. The proposed control scheme guarantees end-to-end RF connectivity of the network, while attaining optimum area coverage. Results are further verified via simulation studies.
1. Introduction
Distributed coordination of robotic swarms has been studied widely in the last years due to its direct application in missions where human interference may be risky or even prohibited. Mobile platforms with sensing, computational, and communication capabilities are in most cases spread in areas of interest in order to investigate various physical quantities and/or even take responsibility of surveying the area assuming intruder detection, patrolling, or exploration scenarios.
Although the agents in the group share a common objective, usually optimizing an a priori aggregate objective function [1–3], the way they collaborate is performed in a spatially distributed manner, rather than a global-coordinating one, due to the physical restriction in the acquired information via the antennas' range. Hence, connectivity preservation during the deployment stage is an issue of major importance, since this ensures information flow among the mobile nodes in order to cooperate for achieving their common goal.
Assuming both limited-range sensing and communication abilities of the platforms, it is evident that demand for connectivity preservation and area coverage optimality cannot be achieved simultaneously, and thus there is trade-off to be balanced [4, 5]. Distributed coordination of mobile networks via intuitive nearest neighbour rules has been proposed by the authors in [6]. Connectivity control of networks has been examined in [7, 8], while more generalized coordinate-free theoretical approaches have been developed in [9, 10].
Coverage of a region by a set of nodes has been examined in previous works neglecting sensing range and thus is approached via a more networked pointed of view. Recent works have utilized topology control techniques in order to reduce the number of redundant links in congested wireless sensor networks [11–14], while antagonistic approaches have also been proposed [15, 16]. Distributed connectivity preservation during the deployment stage has been examined in [17] via estimation of the eigenvalues of the network's Laplacian [18].
In most of the works in the existing literature on the field or distributed sensors deployment, the communication range of the nodes' antennas is assumed either variable but unbounded (in terms of no upper limit) [19, 20] or bounded but greater than twice the sensing range [1, 21, 22]. This dependence of the radio range on the sensing one, although not met in practice, remarkably lets us surpass any network connectivity issues and concentrate on optimization of the covered area.
In this paper, though, the nodes' radio range is assumed to be fixed and can be less than the aforementioned bound (i.e., twice the sensing range). This restriction imposition, although met most often in practical scenarios (where the sensors' and antennas' ranges are uncorrelated), leads in inability to apply already presented area coverage-oriented coordination schemes [2, 6, 22, 23]. Despite the aforementioned radio range constraint, the algorithm proposed in this paper guarantees network connectivity in a finite predefined number of hops, while leading the nodes in an optimal state, considering coverage terms.
The rest of the paper is organized as follows. In Section 2 the problem of surveillance of a region by a mobile sensor network is introduced, along with the main preliminaries on Voronoi partitioning. In Section 3 the background concerning network connectivity is presented, while connectivity in a finite number of hops among two nodes is analysed from a graph perspective. The proposed coordination scheme that takes into account the network's coverage performance along with communication constraints imposed due to radio restrictions is presented in Section 4. Simulation results in Section 5 further confirm efficiency of the proposed scheme, while concluding remarks are provided in the last section.
2. Coverage Problem Formulation
Consider n in number mobile robotic agents responsible for the sensing coverage of an area of interest D, defined as a convex compact set in
The robots are considered to evolve in the interior of D in discrete time via the control inputs

Assuming surveillance purposes, sensors are embedded on the robotic platforms that sense the area in range of r around the nodes, denoted by


A quite common method to deal with such kind of problems in swarm robotics is to tessellate the space into subsets via a distance-based metric and assign them among the nodes. Voronoi diagram [24],

Let

Utilizing the sets



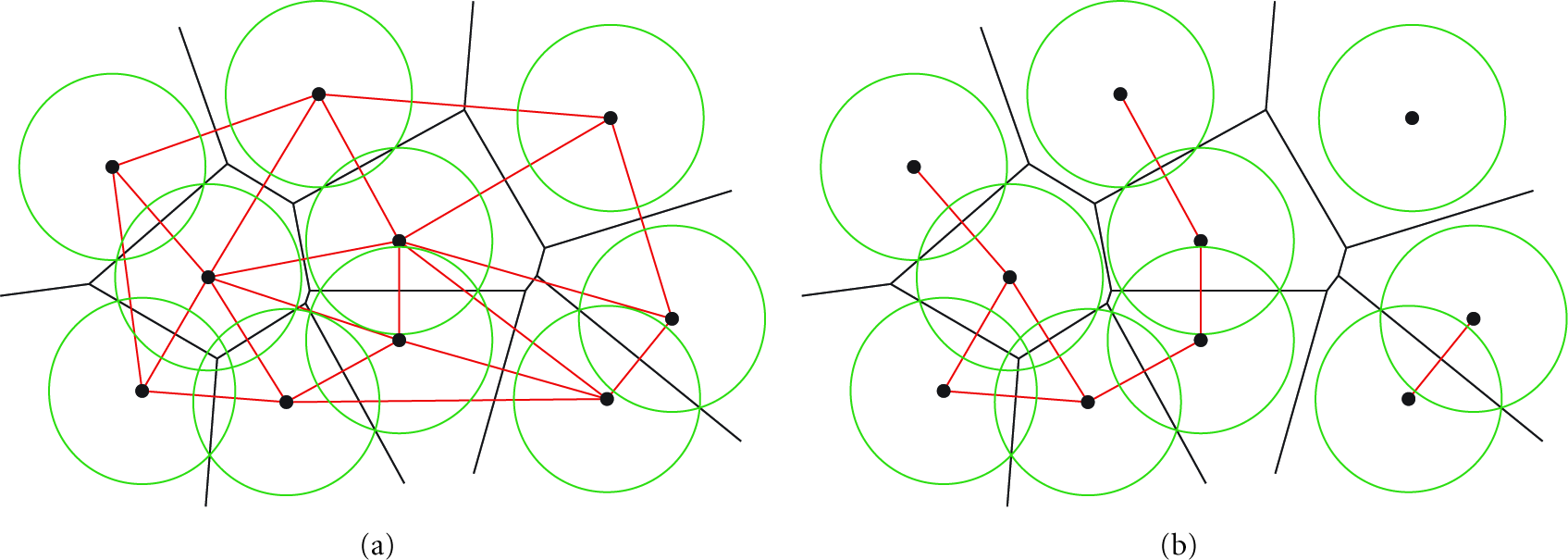
Graphical representation of the Delaunay (a) and
3. Radio Connectivity Issues
An issue of major importance in coordination of mobile sensor networks is the distributed nature of the designed control schemes. In other words, the nodes should organize their action without global knowledge of the network's state, but via local information from neighbouring nodes, instead.
Each node is assumed to be equipped with radio transceivers in order to be able to exchange spatial information with other neighbouring nodes in range. The antennas are assumed to transmit omnidirectionally around
Apparently, a bidirectional communication link exists among any two nodes i and j if and only if
Definition 1.
Two nodes i and j in the communication graph
Definition 2.
Given the communication graph
Definition 3.
Two nodes i and j in the communication graph
Given a sensor network and the communication graph
The motivation for introducing N-hop connectivity term among the nodes (Definition 3) is the fact that motion is performed in discrete time. Thus, from a practical point of view, one can assume that between two consequent motion time steps k and
Assumption 1.
Initially, each node is ℓ-hops connected with all its

The aforementioned assumption becomes clearer via Figure 2, presenting a sensor network of 7 nodes with ratio
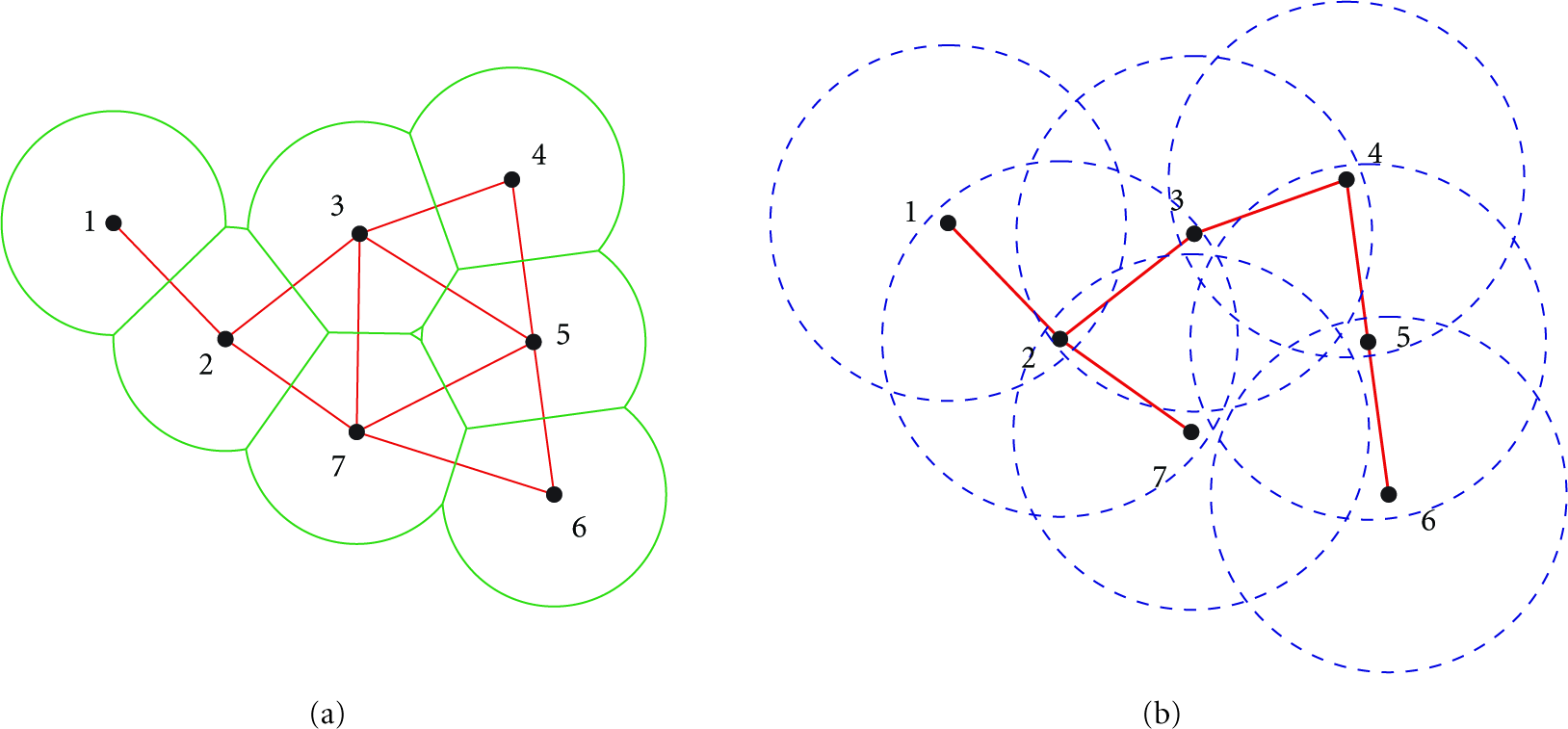
Graphical example in order to associate
In fact, it is apparent that if
4. Connectivity-Aware Coordination Scheme
Recalling ℋ as defined in (7), the primary objective of the nodes in the network should be to self-deploy themselves in a way that the area of the sensed part of D (expressed as the summation of the areas of the corresponding r-limited Voronoi cells) is as high as possible, assuming bounded sensing domains. Furthermore, coordination at this stage should be performed in a distributed manner via local information, as exchanged among the nodes considering their communicational capabilities. As far as the coverage-part of the objective is concerned, let us first state the following lemma which will form the basis of the coordination stage.
Definition 4.
A set of n distinct points in D is called an r-limited centroidal Voronoi configuration if and only if each point lies at the centroid of its own r-limited Voronoi cell.
Lemma 5 (see [23]).
The area covered by a set of nodes in an r-limited centroidal Voronoi configuration is locally maximum.
In this paper, since coordination of the network is assumed to be performed in discrete time-steps, the nodes are selected to move towards the centroid of their corresponding r-limited Voronoi cells via fixed step sizes, until they reach optimum configuration where the total sensed area is maximum. More specifically, considering (1), the control law
It should be noted that monotonicity of ℋ is not guaranteed during the transition of the network towards the r-limited centroidal Voronoi configuration; however, since one node moves at each time step (as stated in Section 2), the network will reach asymptotically area optimal configuration.
However, in order to characterize the control scheme (10) as decentralized, in the sense that the node to move does not require global network knowledge to apply it, the aforementioned node should be able to evaluate its r-limited Voronoi cell via information from the nodes in range. In most of previous works in the literature, this communication issue is surpassed by allowing the nodes' communication range to be at least twice the sensing one, since only the nodes in range of
In this paper, however, an extra constraint is considered via limiting the communication range R to any arbitrary value, which in practice is imposed by the antennas' radio characteristics. The proposed control action is based mainly on preserving at most N-hop radio connectivity among the
Let us denote by i the node to move at an arbitrary time step k. The latter decides on making a move towards the centroid of its r-limited Voronoi cell, in order to increase network's coverage performance. However, node i is assumed to have spatial information acquired from the nodes that it is N-hops connected with. It is clear that if after the motion a new node joins the set of the nodes that i is connected with, then no issue arises, since this just provides an extra link in the
In the case, however, where a link is about to break if motion is performed, then the node to move checks if that link was included in the shortest path in
(1) [time-step k; node i is to move] (2) identify N-hop neighbouring nodes (3) evaluate (4) evaluate control law (5) estimate locally altered communication graph (with i at new position, but before performing the motion) (6) (7) (8) (9)
Although the control scheme described previously incorporates some kind of conservatism, it is still able to (i) increase network's coverage performance from one step to another, while (ii) preserving N-hop radio connectivity among the
5. Simulation Results
Simulations were conducted in order to further verify efficiency of the proposed coordination scheme. The region D to be surveyed is considered as a convex compact planar set of total area
The nodes are initially deployed randomly in D, so that Assumption 1 holds, for both cases. Given the set D, the maximum possible coverage ratio achieved that is evaluated as the summation of n circles (best case scenario) is equal to 100% and 40.5% of D, respectively, for each case. The network's initial configuration, evolution through time, and the final network's state, for the first case study are shown in Figure 3, in this order.

Case Study I: coordination results derived via the proposed control scheme. (a) Initial network configuration. (b) Network evolution. The green (red) circles represent the nodes' final (initial) positions. (c) Final network state. Communication graph indicates 1-hop connectivity among the
It is apparent that the network achieves optimum coverage, while the nodes retain radio connectivity with their
As far as concerns the second scenario,

Case Study II: coordination results derived via the proposed control scheme. (a) Initial network configuration. (b) Network evolution. The green (red) circles represent the nodes' final (initial) positions. (c) Final network state. Communication graph indicates 3-hop connectivity among the
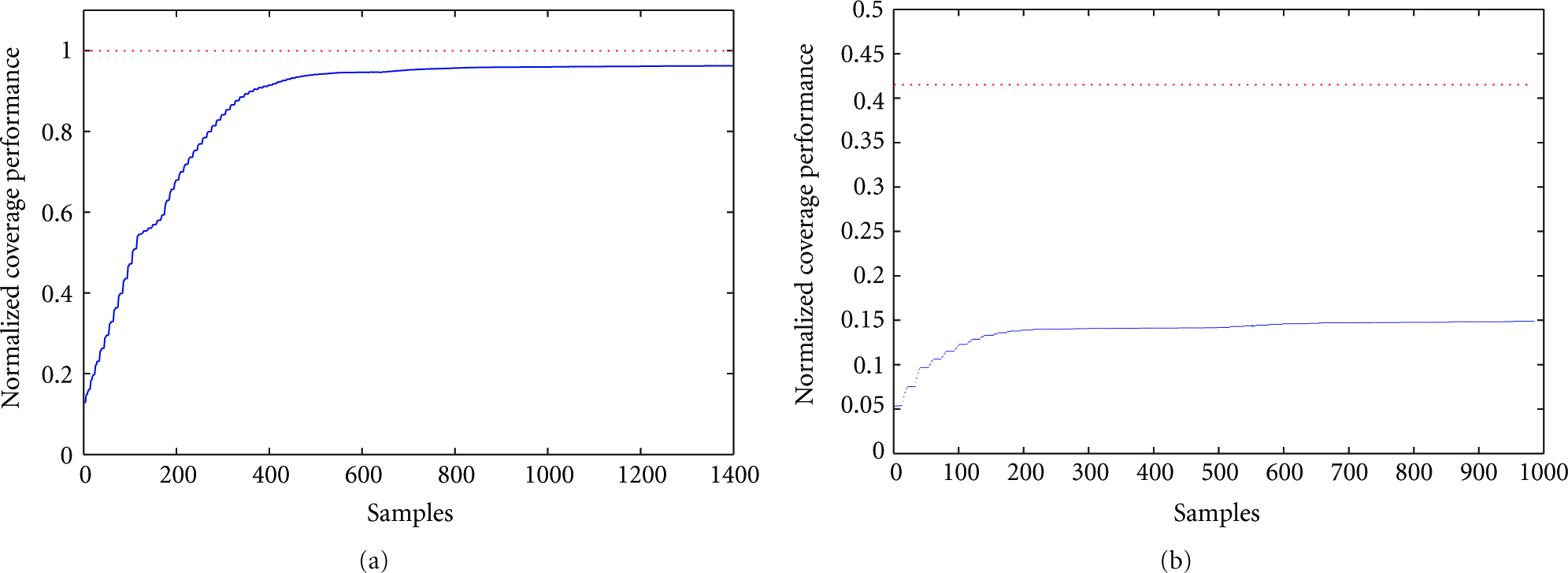
Percentage of sensed area during network evolution for Case Studies I (a) and II (b), respectively. The red upper-limit represents the maximum possible coverage ratio, in each case.
Figure 5 depicts the evolution the normalized network's coverage, that is, ℋ as a ratio of the area of D when coordination scheme of Section 4 is applied (blue line). The red line represents the maximum possible coverage ratio, that is, 40.5%. More specifically, the sensed area percentage, starting from an initial value of 5% (dependent on the initial network configuration), increases as network evolves, until it converges to 14.8%, which is quite satisfactory considering communication constraints imposed.
One can see that the communication constraint imposition retains the network from achieving optimum area coverage, as evaluated via the best case scenario. However, the coverage performance attained is in fact quite satisfactory, taking into account that all nodes preserve 3-hop radio connectivity with all their
6. Conclusions
In this paper, a spatially distributed approach was proposed for leading the mobile nodes of a sensor network towards an area optimal configuration, while simultaneously preserving radio connectivity among the nodes. The scheme was developed for the general case, where the radio range of the nodes' antennas can be less than twice the sensing range. Each node that moves is ensured to attain N-hop connectivity with the subset of nodes needed for decision making about the spot to move, so that the area coverage of the network is increased. Simulation studies were conducted verifying the efficiency of the proposed scheme.