
Abstract
A multiobjective optimization coverage control strategy is proposed for solving the contradictory problem among energy consumption, equilibrium of energy, and network coverage in wireless sensor networks. A new evolutionary algorithm named Multiobjective free search algorithm (MOFS) is designed for WSN optimization problem based on fitness functions and binary coding schemes. The proposed strategy is used to estimate the number of active nodes because individual nodes cannot have their working state information readily. Simulation shows that MOFS is effective to solve the typical combinatorial optimization problem, and the coverage control strategy can obtain high network coverage and reduce energy consumption effectively by the reasonable selecting parameters, while equilibrium of energy consumption is also considered.
1. Introduction
The current interest in wireless sensor network (WSN) stems from the potential of using sensing devices to explore environment of the planet. To accomplish this type of exploration, sensor nodes must have the ability to self-configure into a communication network and provide energy-efficient data transmission. Coverage control problem is one of the most fundamental issues in wireless sensor networks, because it is a measure of the quality of service (QoS) in a sensor network [1]. Sensor nodes in network are usually equipped with batteries with limited power. Therefore, energy conservation operations are critical for extending network lifetime [2].
Wireless sensor network has emerged as a promising tool for monitoring the physical world. It utilizes self-organizing networks of battery-powered wireless sensors that can sense, process, and communicate [3]. The optimal set of active nodes selection has been proved as an NP-complete problem with random WSN network topology [4]. Heuristic algorithm is an effective way to solve this problem. PEAS is a well-known protocol proposed by [5]. By the protocol, some nodes will become redundant nodes that need not be activated, as long as the other nodes exist within sense area of the inactivated nodes. The centralized and distributed greedy algorithms have been proposed based on randomized algorithm, so that nodes set can cover target area as large as possible [6]. The approach of [7] effectively extends network lifetime by alternating the active or sleep state of node. The linear programming method is used to obtain the minimum active nodes set to keep coverage [8]. And the coverage uniformity is considered simultaneously. pCover protocol is proposed by [9]. The protocol is only based on local information without the need of time synchronization. Voronoi diagram is used to calculate the worst path and the most effective path in sensor networks [10]. The aforementioned coverage control algorithms are trying to extend network lifetime under the condition that QoS is guaranteed. However, to the best of our knowledge, it is found that the least number of active nodes does not represent that network performance is the best in random network topology. The balance of network energy consumption is also the key factor to determine lifetime and operation stability of entire network.
Intelligent computing has been applied to wireless sensor network coverage control because of adaptability and optimization capabilities. The target area is divided into grid, and genetic algorithm is used to seek maximized coverage under certain total price [11]. Particle swarm optimization is specially used for subcluster sensor networks that are based on maximum entropy clustering in large-scale wireless sensor networks. Then mobile nodes are arranged to achieve complete coverage [12]. The study in [13] uses
In this paper, a new multi-objective optimization coverage control strategy for energy efficient wireless sensor network is presented, in which a new multi-objective free search (MOFS) algorithm based on the characteristics of WSN is also introduced. Network coverage and network energy equilibrium are the two goals optimized by MOFS in WSN coverage control. The main contributions of this paper are threefold. First, a framework for optimizing the tradeoff between network coverage and network equilibrium energy consumption is developed. The developed framework is an example of MOFS algorithm for combinatorial optimization problems. Next, the proposed strategy not only ensures the minimum nodes utilization, but it also takes the balance of entire network energy consumption into account. Finally, simulation results are presented to characterize the performance of our strategy. Results indicate that the new coverage control strategy can significantly enhance network coverage, reduce network energy consumption, and balance network energy consumption.
2. Problem Formulation
2.1. Problem Description
It is well known that wireless sensor network should be deployed with high density in order to improve coverage. Nodes self-organize to achieve a desired degree of coverage. The random deployment of sensors may lead to redundant nodes that sense the same area. If all sensor nodes simultaneously operate, redundant sensing data, corresponding wireless communication collision, and interference will cause much energy to be wasted. As the number of sensors deployed in target area is greater than the optimum needed to perform full coverage, an important energy-efficient method coverage solution is desired. Each sensor has two states: active or sleep. A sensor in active state consumes more energy than the sleep state. However, object sensing can be performed only in active state. Sizable energy savings can be achieved by using aggressive coverage control strategies in devising adaptive sleep schedules to minimize the amount of energy lost due to needless sense of redundant nodes. If a certain sense region of nodes can be completely covered by other nodes, this node is a redundant node and can be sleep. An important method for WSN coverage problem is to find the cover in sensors network. It is defined as a set of nodes that can completely cover target area. Therefore, in initial stage of the network, reasonable selection of nodes is important for network performance and operating costs. At the same time, balance consumption of network energy is crucial to stabilize operation of network and to extend lifetime of network. Thus, wireless sensor network coverage is a typical multi-objective optimization problem.
2.2. Network Model
Firstly, we assume that the target area is a two-dimensional rectangular region, and k sensors are randomly deployed in deployment stage. The binary sensor model [16] is shown in (1), expressing the coverage

Sensor i is deployed at point
In other words, a point

2.3. Mathematical Description of the Problem
We first define the terms in describing the local rule and the strategy. A is target region area.

WSN node utilization ρ is defined as

Definition 1 (regional energy
).
The monitored area is divided into K uniform grids,
Definition 2 (energy-span
).
The regional energy difference between the maximum and minimum values is divided by the maximum value of the regional energy. The divided result represents the energy span of current network

The contradictions, resulting from coverage control and algorithm running time, counterbalance each other. Regarding energy span and node utilization efficiency as optimization goal individually will increase complexity of algorithm. Meanwhile, equilibrium of network energy consumption is closely related with current node utilization. Therefore, in this paper, a linear weighted sum method that introduces energy consumption weight and energy balance weight is used to compromise on node utilization efficiency and energy span and make redundant nodes sleep to save energy on the basis of energy balance consumption. As a result, the optimization of active node set can be described as dual-objective optimization problem (DOP).
Object 1
Network coverage that is desirable to be maximized in the probability that the point of target region can be sensed is defined as

Object 2
Network equilibrium energy consumption that is desirable to be minimized in node utilization efficiency while considering energy balance consumption is defined as

In order to minimize the two objectives simultaneously, the coverless is used as one of the fitness functions

All in all, wireless sensor networks multi-objective coverage control model can be described as

3. Multiobjective Free Search Applied to WSN Coverage Control
A novel algorithm of swarm intelligence, free search (FS), is introduced, which is used to solve function optimization problems [17–19]. Considering aforementioned WSN network model, encoding rules and exploration strategy are improved to accommodate new design of the multi-objective free search algorithm.
3.1. Encoding Rules
As for the optimal sensor set selection in wireless sensor network, the solution is represented by a bit string N. Each individual sensor node is represented by a 1-bit binary number. The bit is used to describe the working state of the sensor node. Encoding defines the state of sensor nodes as follows: If it is equal to 1, the sensor is selected to be active, or else the sensor is unselected. Its encoding form is
Two examples of active node-set options are illustrated in Figure 1. As network nodes are randomly laid 8, the length of binary string is 8. As can be seen from Figure 1(a), network nodes (1, 3, 4, and 8) are active, and then the remaining nodes are on sleep state (redundant nodes); Figure 1(b) indicates that all nodes have been selected as working nodes, on active state.

Binary encoding structure of WSN.
3.2. Exploration Strategy
The original exploration walk generates coordinates of a new location

The original modification strategy is

For binary encoding rules and fitness function, we improve the evolution equations based on the above steps and select the suitable neighbour space (to be discussed in Section 4) to meet the requirements of the model.
The improved evolutionary equation is

3.3. Multiobjective Free Search Architecture
In [18, 19], the application of free search algorithm in the single-objective optimization is studied. A new multi-objective free search algorithm is designed for the aforementioned DOP, and its implementation is shown in Algorithm 1. The framework of MOFS developed by us is also fit for other combinatorial optimization problems.
initialise number of generation G, population size pop and individual step limit per walk T; initialise generate an initial population randomly; generate an archive arc randomly; select start locations for a walk; take exploration walks; assign fitness to individual i according to its position; } update the parent populations and the external archive; record the best individual; }
4. Simulation
The performance of multi-objective optimization coverage control strategy sections is given in this section. In particular, the performance of MOFS is discussed, and the parameters study is carried out. The simulation is conducted in MATLAB.
4.1. Effectiveness of MOFS
First of all, multi-objective traveling salesman examples are used to verify the validity of the algorithm, and the performance was compared with a few important previous works’ algorithms. It can lay a good foundation for WSN application.
Multi-objective traveling salesman problem (MOTSP) is a classic multi-objective optimization problem [20], which can be described as follow: there are N cities, and each path between two cities has L indicators; the problem is finding a best close route passing through all the cities and once for each city, while making a balance with L indicators of the route. For instance, it requires to select a best route with the shortest distance, the minimum risk, the least time and cost, and so on. The set of all solutions satisfying the above condition is named Pareto set. Thus, MOFS can be a powerful tool to solve MOTSP.
The mathematical model of MOTSP can be stated as follows: given a weighted graph

Objective function can be described as

Constraints can be described as

An example from reference [21] was used to quantify the efficiency of the algorithm. There are 6 cities in this example; the distance value matrix

MOFS parameter settings were as follows: individual step limit per walk T was 10, population size
Pareto front obtained by MOFS is shown in Figure 2. Result is consistent with [21], the shortest distance is 158, and the least cost is 197. Then, (158, 197) is the ideal solution according to the definition. Thus, (158, 280) in the archive is the current optimal solution, because it has a minimum deviation of 0.4213 with the ideal solution.

Pareto front obtained by MOFS.
Pareto front obtained by MOFS was compared with Ant colony algorithm (Ant cycle, Ant density, and Ant quantity), simulated annealing algorithm(SA), and 2-opt algorithm in [21]. The algorithm performance is shown in Table 1. It can be observed that there are many more nondominated solutions in Pareto front with MOFS, and the convergence situation is better.
Multi-objective TSP simulation results.

These results show that MOFS can effectively solve multi-objective combinatorial optimization problems. And compared with the traditional multi-objective algorithm, MOFS can achieve better performance.
4.2. Effect of Parameter on Performance
In this section, the parameters study is carried out, and their effect on the performance is discussed. We studied the effect of variable
4.2.1. Selection of Variable Neighbour Space
We studied the effect of variable neighbour space
WSN configuration was assumed: target area was 100 m × 100 m rectangular area, 196 sensor nodes were planted in this region with grid topology, and the distance between two neighbor nodes was 7 m. All the used nodes were the same type. Coverage area of each sensor was a circle of radius
Pareto front under different neighbour space

Pareto front under a different
Next, setting neighbour space was variable, and initial
Pareto front under a different
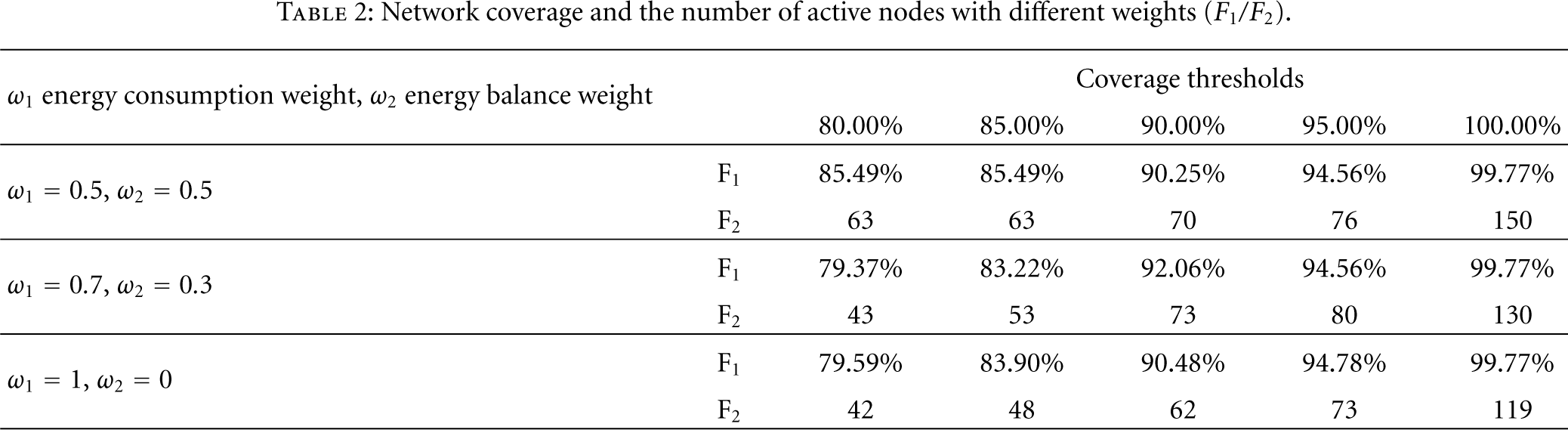
4.2.2. Selection of Weights
The choice of weight is reasonable or not can affect the performance of coverage control strategies. For practical problems, different selection of weight can meet various business requirements. The simulation comparisons for different weight option will be discussed as follows.
The initial
Table 2 shows the network coverage
Network coverage and the number of active nodes with different weights
4.3. Performance of Multiobjective Coverage Control Strategy
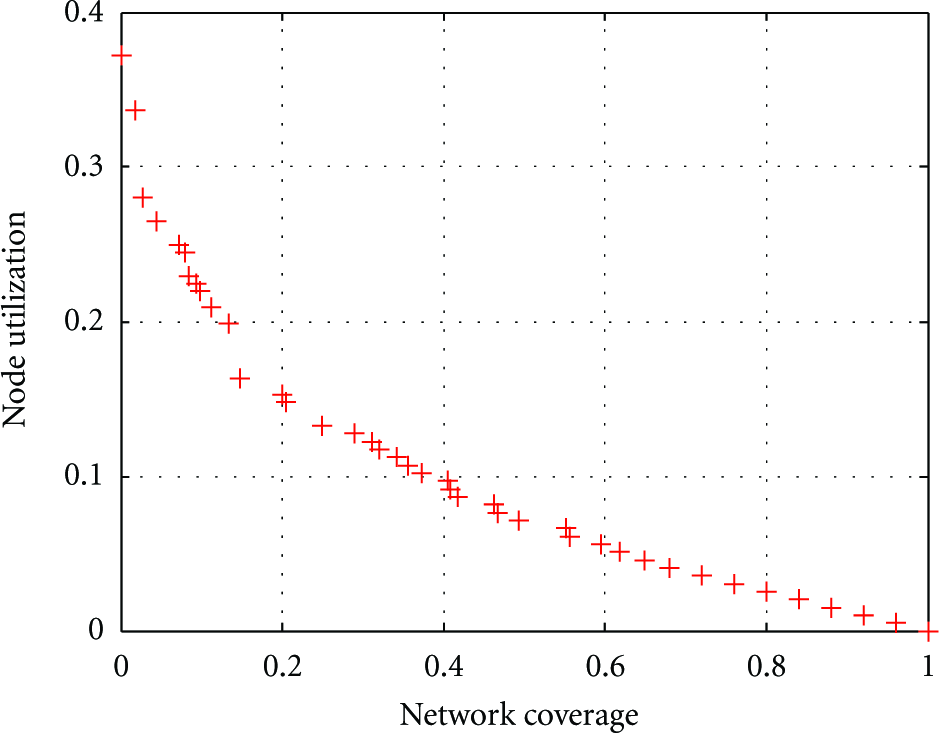
In this section, network coverage and network equilibrium energy consumption tradeoff provided by multi-objective coverage control strategy are studied. Network coverage
The target area was 100 m × 100 m, and plant 200 sensor nodes were randomly and evenly distributed, and
MOFS's initial
In the cover control simulations (Figure 5), we select nondominated solutions in Pareto solution set and plot curves, respectively, to observe the coverage and the number of active nodes. It can be seen from Figure 5(b) that there are a large number of redundant nodes in initial random network, and the initial coverage is 99.77% in 200 nodes network. In Figure 5(d), the utilization of 67 nodes obtain 93.65% network coverage in the 50th generation of algorithm (the blue part in the figure indicates the region not covered). Because of our strategy taking equilibrium of network energy consumption into account, the least active nodes number is not the best. When the algorithm runs to 100th generation, the use of 73 nodes can guarantee 92.06% network coverage, and the active nodes are distributed more evenly.

Multi-objective optimization coverage control experiment of WSN. (a) The initial distribution of 200 nodes. (b) The initial coverage of 200 nodes is 99.77%. (c) The 10th generation, coverage of 101 nodes is 97.96%. (d) The 50th generation, coverage of 67 nodes is 93.65%. (e) The 100th generation, coverage of 73 nodes is 92.06%.
For different business requirements, WSN network needs to achieve different monitoring coverage rate. The partial coverage problem is that the users assign the preset coverage threshold based on the actual business requirements. In most cases, partial cover can meet the business requirements and need fewer work nodes. At the same time, network energy consumption becomes smaller, so the network lifetime is extended. Since the coverage control strategy by MOFS is able to generate a set of Pareto-optimal designs, the system designers will have more freedoms to make a reasonable tradeoff from the set of Pareto-optimal solutions according to their preferences or operation requirements. Network coverage situation with MOFS is shown in Figure 6 when coverage threshold is 80%, 85%, 90%, 95%, and 100%, respectively. Each option is the nondominated solution that is the closest coverage to the preset threshold in Pareto solution set.

Coverage and number of active nodes under different preset coverage threshold. (a) Coverage 79.37%, 43 nodes. (b) Coverage 83.22%, 53 nodes. (c) Coverage 92.06%, 73 nodes. (d) Coverage 94.56%, 80 nodes. (e) Coverage 99.77%, 130 nodes.
These results show that the coverage control strategy can effectively reduce the use of redundant nodes to decrease overall network energy consumption based on the balance consumption of energy.
5. Conclusions
In this paper, an energy-balanced consumption coverage control strategy based on multi-objective optimization is presented. The strategy is used to compromise on coverage, energy, and energy equilibrium degree by MOFS algorithm to determine the working status of sensor nodes. Meanwhile, the proposed strategy can adjust weight and coverage threshold to obtain the optimum allocation of different business requirement and then to improve the applicability of WSN network. It is obvious that the coverage control strategy has wide applicability, and the effectiveness of the strategy is verified by the simulated results.
Footnotes
Acknowledgments
This work has been supported by the National Natural Science Foundation of China (no. 60901041), the Science and Technology Project of Nantong University (no. 09ZW001), and the Nantong Application Research Project (no. K2010015).