
Abstract
Navigation with wireless sensor networks (WSNs) is the key to provide an effective path for the mobile node. Without any location information, the path planning algorithm generates a big challenge. Many algorithms provided efficient paths based on tracking sensor nodes which forms a competitive method. However, most previous works have overlooked the distance cost of the path. In this paper, the problem is how to obtain a path with minimum distance cost and effectively organize the network to ensure the availability of this path. We first present a distributed algorithm to construct a path planning infrastructure by uniting the neighbors’ information of each sensor node into an improved connected dominating set. Then, a path planning algorithm is proposed which could produce a path with its length at most c times the shortest Euclidean length from initial position to destination. We prove that the distributed algorithm has low time and message complexity and c is no more than a constant. Under different deployed environments, extensive simulations evaluate the effectiveness of our work. The results show that factor c is within the upper bound proved in this paper and our distributed algorithm achieves a smaller infrastructure size.
1. Introduction
Recently, as a large number of sensor nodes are deployed to monitor the environment and detect critical events [1–4], navigation has received wide attention in applications of WSNs. Usually, a mobile node is equipped with a device that can communicate with sensor nodes. After a WSN has been deployed in the monitoring area, relevant sensor nodes will send in situ data to the control center when they detect dangerous events happening in the area. Then, a part of sensor nodes would guide several mobile nodes which equip specific instruments to the destination and let them deal with the emergency event, such as navigating fire-fighting equipments automatically to exact areas to extinguish fire. Hence, how to design an effective path for the mobile node is a fundamental problem. The so-called navigation refers to the art of getting from one place to another in an efficient manner. Generally speaking, it could be described by three questions: “Where am I?,” “Where am I going?” and “How should I get there?” [5], which need the localization methods, path planning algorithms and the moving control technology, respectively. In WSNs, the navigation of mobile node needs to communicate with sensor nodes to get the target data and correct its direction. While sensor nodes have finite energy and limited communication range and construct the network topology by self-organization, an efficient data routing infrastructure is necessary for updating rescue instructions periodically so as to guide the mobile node to its destination, for example, virtual backbone [6] and collection tree [7].
Up to now, a part of proposed navigation algorithms in WSNs rely on GPS and other modules to obtain locations of mobile nodes in real time [8, 9], which require a high hardware cost and energy consumption. In some particular environments such as mines, underwater environment, and underground tunnels, location information may not be able to achieve, these scenarios would limit the application of existing navigation algorithms using localization technique. To solve these drawbacks for emergency escape, some researchers [10] proposed artificial potential fields in which sensor nodes act as signposts for the mobile node to follow. Lately, some novel navigation algorithms for emergency rescue in WSNs have been presented [11, 12]. As most of the above algorithms focus on providing safe paths in dangerous environment, they have overlooked the distance cost of paths. In [13], an idea of navigation overhead is denoted as a ratio between the Euclidean length of moving path and the shortest Euclidean length from initial position to destination which indicates the distance cost of algorithm.
In this paper, we characterize the navigation problem as a path planning problem. Firstly, based on the research of connected dominating set, we propose an improved distributed algorithm to construct a preliminary infrastructure for data routing. Then we construct a path planning infrastructure by combining the built infrastructure with neighbors’ information of each node. At last, we introduce a path planning algorithm by tracking sensor nodes in the network based on our path planning infrastructure. We show that our infrastructure not only can serve as a backbone to send in suit data, but also can update and modify the path planning algorithm to ensure its availability. We also prove that the path planning algorithm provides a path which guarantees a constant distance cost compared with the shortest one from initial position to destination in the Euclidean plane.
The remainder of this paper is organized as follows. Section 2 describes the related work. Section 3 introduces some useful definitions and constructs the path planning infrastructure in the network. Section 4 proposes an effective path planning algorithm and analyses the performances of the proposed algorithms. Section 5 shows simulation results. Section 6 concludes this paper.
2. Related Work
A number of solutions have been proposed to solve the navigation problem in WSNs. In [8], an intelligent control architecture for mobile node has been proposed with environment sensing model. The architecture used clustering strategy by applying shared memory in the network and created control with a set of ultrasonic GPS modules. By using a triangular method, the algorithm provided the global position of mobile node in the environment. Therefore, the algorithm could guide the mobile node moving to the target effectively with a high precision, but it had a high cost and was difficult to implement in the environment which cannot obtain the location information of sensor nodes. Without using triangular localization technique, a navigation strategy based on planning reliable visual landmarks has been proposed in [9]. The method modeled landmarks within a directed graph and used the Markov decision process to compute the navigation path. The disadvantage of this strategy was that it needed to provide geographic information of surrounding environment beforehand and equip the mobile node with expensive detectors. To localize the mobile node quickly, it also needed to plan extra artificial visual landmarks in the environment. In [14], a protocol utilized the sensor network infrastructure for navigation has been proposed. Without the location information of network, the protocol constructed a road map system to provide navigating routes of the mobile node which consist of a sequence of sensor nodes to avoid the dangerous area. The mobile node tracked the target sensor node by measuring the strength and direction of wireless signals. When the dangerous areas have changed, the algorithm updated the navigating routes to ensure the safety of the mobile node. Without using any localization mechanism or requiring location information, the study in [10] also presented a distributed algorithm for dangerous area avoidance. During the motion of the mobile node, the algorithm combined the artificial potential field with the destination information to navigate the mobile node in real time. The dangerous area seemed to generate a repulsive potential which would push the mobile node away while the destination generated an attractive potential which would pull the mobile node towards the destination. Each sensor node calculated its potential value and tried to find a navigation path of the least total potential value to make mobile node bypass dangerous area. But the algorithm was prone to produce a local pole which would make the mobile node unable to reach the target. In [15], the algorithm set each sensor node with a weight based on the hop distance to the nearest safe region. Sensors were assigned smaller weight if they were closer to the safe exit. Otherwise, sensors were assigned greater weight. The mobile node chose the sensor node with the smallest weight in its communication range as its direction of movement to avoid the dangerous area. In [11], a novel distributed navigation algorithm has been proposed for individuals to escape from critical event region in WSNs. With no goal or exit as guidance, the navigation algorithm computed the convex hull of the event region by topological methods to make individuals get out of the event region. Because congestion may be caused by the individuals rushing for the safe exits, the study in [12] proposed an efficient navigation strategy by taking both pedestrian congestion and rescue force flexibility into account. The individuals navigation is treated as a network flows problem in the graph which is modeled by the emergency regions. In [13], a navigation algorithm using the metric calculated from neighbor's hop count has been proposed in WSNs. This algorithm did not require predefined maps or GPS modules. By interacting with neighboring sensor nodes, the mobile node moved towards the target where the hop count becomes smaller and finally reached the destination by periodically measuring the value. But the mobile node has not considered selecting a proper sensor node from its neighbors as a local target which would decrease the deviation between current direction and optimal moving direction and there was no theoretic analysis for the distance cost. In [16], a novel method which relied on the heat diffusion equation has been proposed to finish the navigation process conveniently. The method guided the mobile node by establishing a high density of the information field.
In summary, although using a localization technique had more precision, but the algorithms without requiring locations could apply into more scenarios. And most of them modeled a WSN as a graph and let a planning path in the environment correspond to a directed vertex path in the graph. While all of the above algorithms adopted existing protocols for data routing, they have overlooked that an efficient routing infrastructure may not only send in suit data quickly, but also update and modify the path planning algorithm to achieve a guaranteed distance cost.
3. Network Model
In WSNs, we assume that sensor nodes are randomly deployed in the Euclidean plane. Each sensor node u is assigned a global unique identifier which denoted as
In order to construct an efficient path planning infrastructure for routing data and providing an available path, we introduce some useful definitions and properties.
Definition 1.
Given a graph G and a subset
A CDS has been recommended to serve as a virtual backbone for WSNs to dramatically reduce routing overhead. In this paper, we focus on a special CDS proposed by Du et al. in [19]. Because not only the CDS can provide a guaranteed routing overhead for any pair of nodes which will be shown in Lemma 3, but also we can implement it to build an effective path planning infrastructure by uniting neighbors’ information of each sensor node into CDS.
Definition 2.
Given a graph G and a subgraph
Lemma 3 (see [19]).
Let G be a connected graph and C a dominating set of G. Then, for a constant
Clearly, for any two adjacent vertices u and v in UDG, there is
Although in [20], a better performance of β was proposed, but it did not give any sufficient and necessary condition. And it needed a centralized computation through the sequence of a shortest vertex path between two corresponding distinct vertices in the network. Here, we improve the limitation of
Lemma 4.
Let G be a connected graph. For a constant
Proof.
It is trivial to show the “only if” part. Next, we show the “if” part. Consider a pair of distinct vertices u and v. Let the shortest vertex path from u to v in G be
By Lemma 4, we can distributedly construct the backbone with guaranteed routing overhead which is a foundation of our path planning infrastructure. Compared with the algorithm in [19] which contained two BFSes to connect any pair of vertices u and v in the DS with
(1) Adopt the algorithm in [17] to compute a dominating set C in graph G simultaneously. (2) Color each node in C black and the others white. (3) Each white node v computes the number of its black neighbors which is referred to (4) Call procedure Coloring2(G, C) to color a part of white nodes with (5) Call procedure Coloring3(G, C, (6) Let
Procedure 1.
Coloring2(G, C)
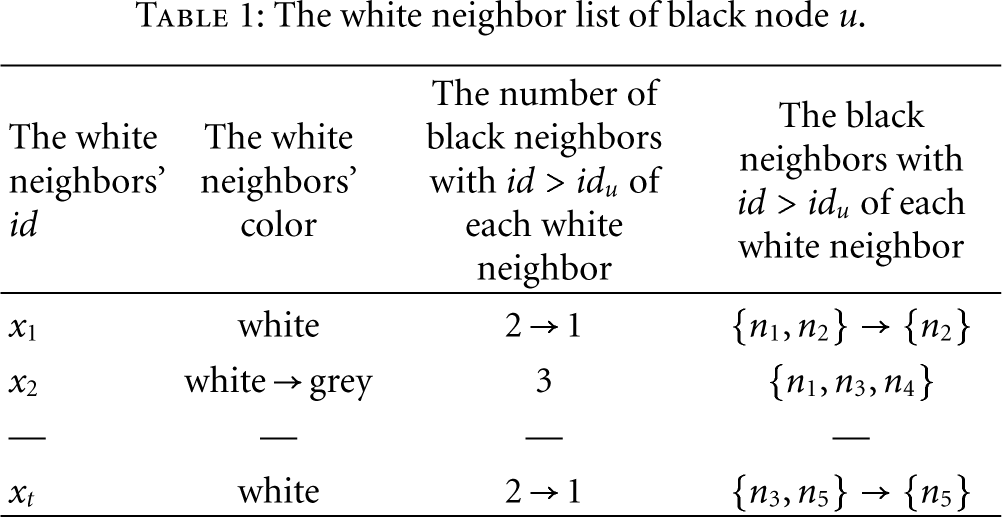
Each white node x with After black node u has received packets ( For each black node u, we assume that there are at most t white neighbors. Note that For each black node u, repeat step (3) until all numbers in the third column of the table are zero.
As shown in Table 1, we assume that
The white neighbor list of black node u.
Procedure 2.
Coloring3(G, C,
Each grey node y and white node x send packet ( When a grey node For each black node u in For each black node u in Each white node x sends (
Lemma 5.
The message complexity of Algorithm 1 is
Proof.
By Procedures 1, and 2 and step (3) of Algorithm 1, each node needs to send constant messages to construct
After Algorithm 1, we have accomplished a preliminary backbone. Then for each sensor node, it saves the angle information of its neighbors by measuring the direction of wireless signals [22].
Definition 6.
Given two vertices
For each vertex u in G, let
Lemma 7.
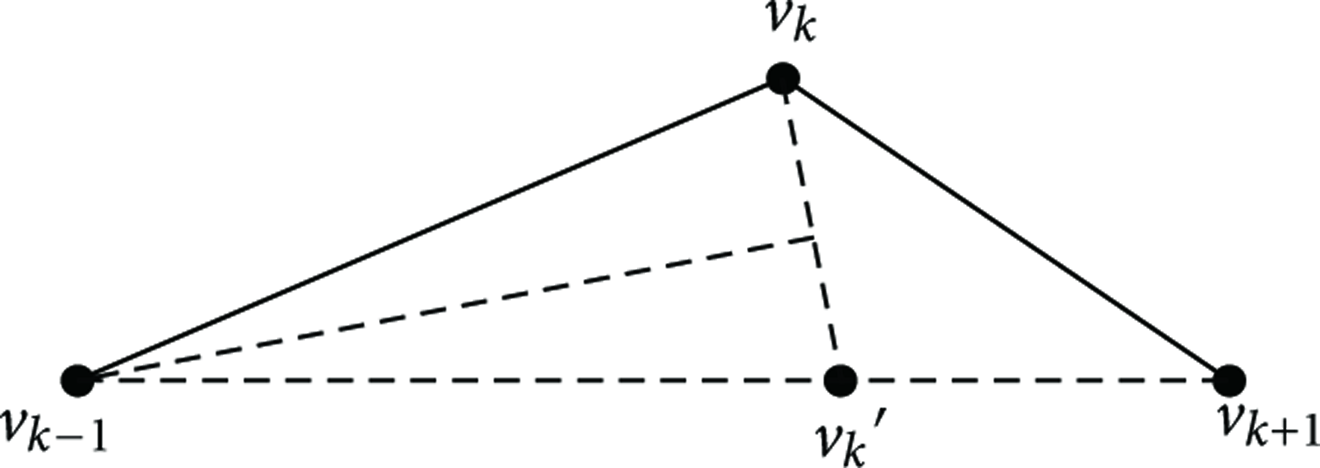
Given the destination D and two adjacent vertices u and v, if there exist
Proof.
First, as shown in Figure 1, let u and v choose the same direction as the reference direction. It is trivial to show that
Then, based on the law of cosine, we have
Then,


Therefore, we can obtain

Compute
By Lemma 7, for each vertex u in graph G, u computes the angle set
4. A Path Planning Algorithm
In [13], Lee et al. proposed the overhead of navigation algorithm. Let S denote the initial position and D be the destination.
Definition 8.
Given a constant
Before proposing our path planning algorithm, the destination data needs to be sent to sensor nodes by the infrastructure.
4.1. Send Destination Data
After the whole area has been monitored by a WSN, some sensor nodes would detect critical events when they have happened in the environment. Supposing that sensor node v has detected the event, then v will confirm the event point D by special measuring modules and transmit the packet
4.2. A Path Planning Algorithm in WSNs
After sensor nodes in the network have obtained information of destination D, the mobile node which denotes as M with enough energy will move to D automatically using the information stored in sensor nodes. Here, we assume that the communication and sensing range of M are the same with those of sensor node which are
Note that
//Next(M) saves the temporary targets for M to track. (1) Place mobile node M at the position S. (2) Next(M) = NULL (3) (4) (5) (6) M computes a virtual sensor node u′ (7) Call Algorithm 1 to update the planning infrastructure (8) Call Procedure 3 to find a substituted path to bypass u′ (9) (10) Add w into Next(M) and let M move to w (11)
For an extreme situation where there is no sensor node in
The detailed algorithm is shown in Algorithm 2.
Procedure 3.
Finding a substituted path
Compute Find a shortest vertex path
To evaluate the performance of Algorithm 2, we assume that sensor nodes have been randomly deployed in a unit square. Then, we give the probability of nodes in each grid of a partition of this square using Chernoff's bound.
Lemma 9.
Given a randomly deployed node set V and a partition of unit square
Proof.
Partition

Applying the Chernoff's bound, we have

So, for all grids in unit square, we denote the number of nodes in

Using

Then, based on Lemma 9, we introduce the probability of sensor nodes existing in the sector
Theorem 10.
Given a random node set V and the communicating range
Proof.
By Lemma 9, when the mobile node M is in a grid

By setting
In order to analyze the distance cost of path by Algorithm 2, we propose a lemma when there is no extreme case happening.
Lemma 11.
Let

Proof.
Note that
Furthermore,

A vertex path from
Without loss of generality, we assume that there exists only one extreme case during planning a path in Algorithm 2.
Theorem 12.
Let

Proof.
We assume that the extreme case happens at

Note that each
5. Simulation Results
As mentioned previously, many studies have shown novel algorithms for the infrastructures. In this section, firstly we use VC++6.0 to conduct simulations to compare the performance of algorithm IRC with those of GOC and ICDS in [19, 20], respectively. The area of simulation is a virtual square
Figure 3 shows the infrastructure sizes of algorithm IRC, GOC, and ICDS under the different

Infrastructure sizes.
Figure 4 shows the diameters of graph G and infrastructures produced by algorithm IRC and GOC. When

Diameters.
Then, based on the infrastructure which has been constructed, we use VC++6.0 and Matlab 7.0 to evaluate algorithm MSNA. To compare with the distance cost of algorithm ANHC in [13], we set the environment and network parameters to be the same with those in [13]. Table 2 shows the detailed parameters which will be used. We provide four different ways for sensor nodes deployment: (1) 99 nodes are deployed in
Simulation parameters.

In Figure 5, four different planning paths are presented under corresponding deployed ways. By tracking the realistic sensor nodes in the network, all the paths can be defined as directed vertex paths in the graph which is modeled by a WSN. In each figure, we use the symbol “*” and “☆” to stand for the initial position and destination of a planning path, respectively. The dots which are encircled by “△” are represented as the sensor nodes tracked by mobile node. A dashed circle denotes the transmitting range of wireless signal. In Figure 5(a), at the beginning, the mobile node chooses the optimal sensor nodes from its neighbors as the temporary target. Without using a localization technique, the mobile node tracks the temporary targets which could be computed by algorithm MSNA in the uniform network. In Figure 5(b), for the given initial position, although there is a hole in the center of
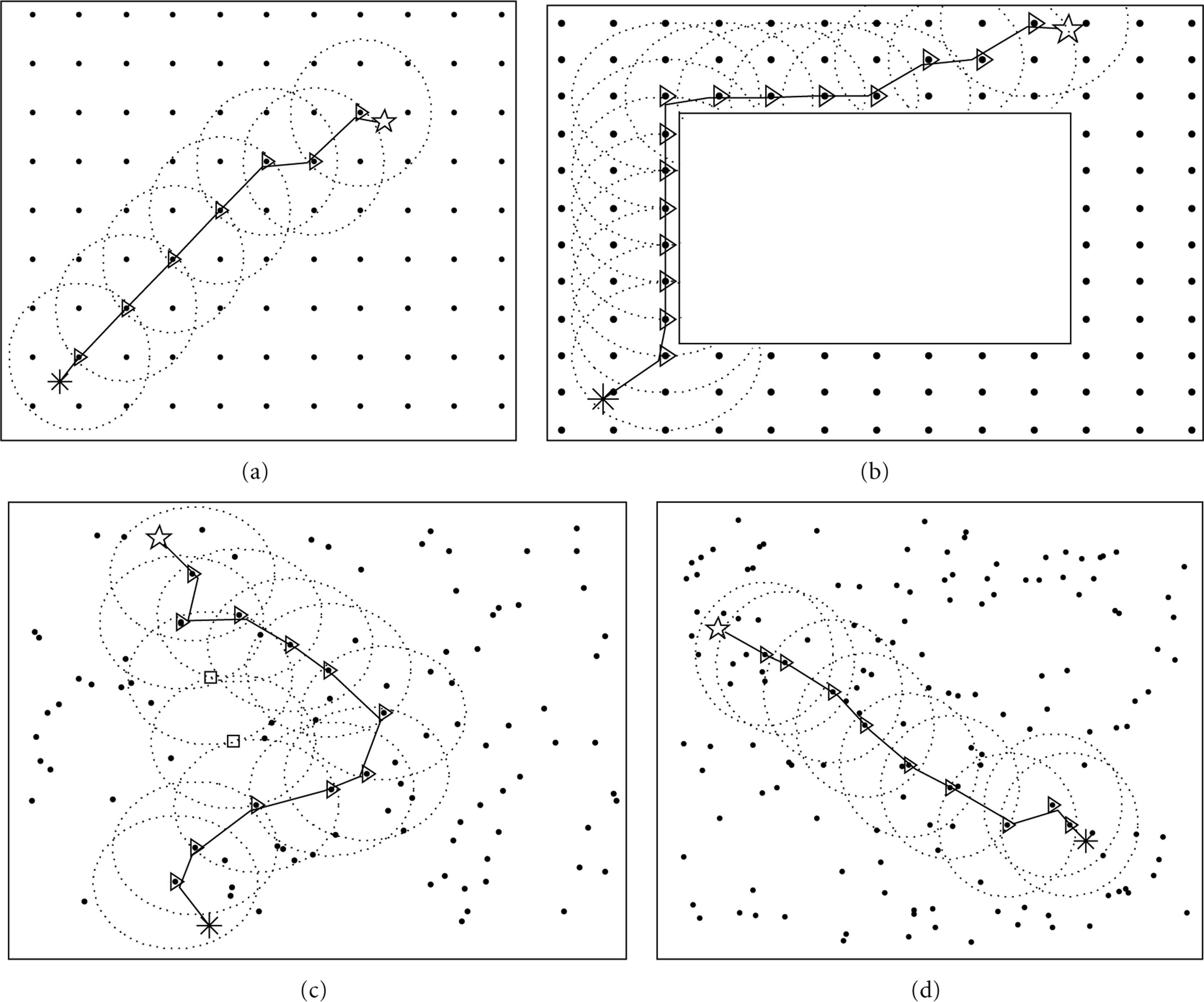
Trajectories of the mobile node by MSNA.
In [13], the algorithm ANHC using average hop-count of neighbors is the first one concerning the cost of a navigating path without localization. In the initial phase, each sensor node sets up its hop count value to the destination. Then, every sensor node computes the value anhc by communicating with its neighbors. It implicated that sensor nodes which are closer to the destination would have smaller anhc compared with the ones which are far away from the destination. The mobile node computes its anhc at its present location. By judging the variation of value anhc, the mobile node revises its direction. The disadvantage of this algorithm is that although the decreasing of anhc shows that the mobile node is moving to the destination, it cannot indicate the deviation between current direction and the optimal direction which may lead to a high cost. In algorithm MSNA, at current position, the mobile node chooses the optimal temporary target which makes the deviation between direction of movement and the optimal direction be minimum. But there also exists the disadvantage in MSNA because we cannot guarantee there must have candidates in the sector
In the following, we randomly set the initial position
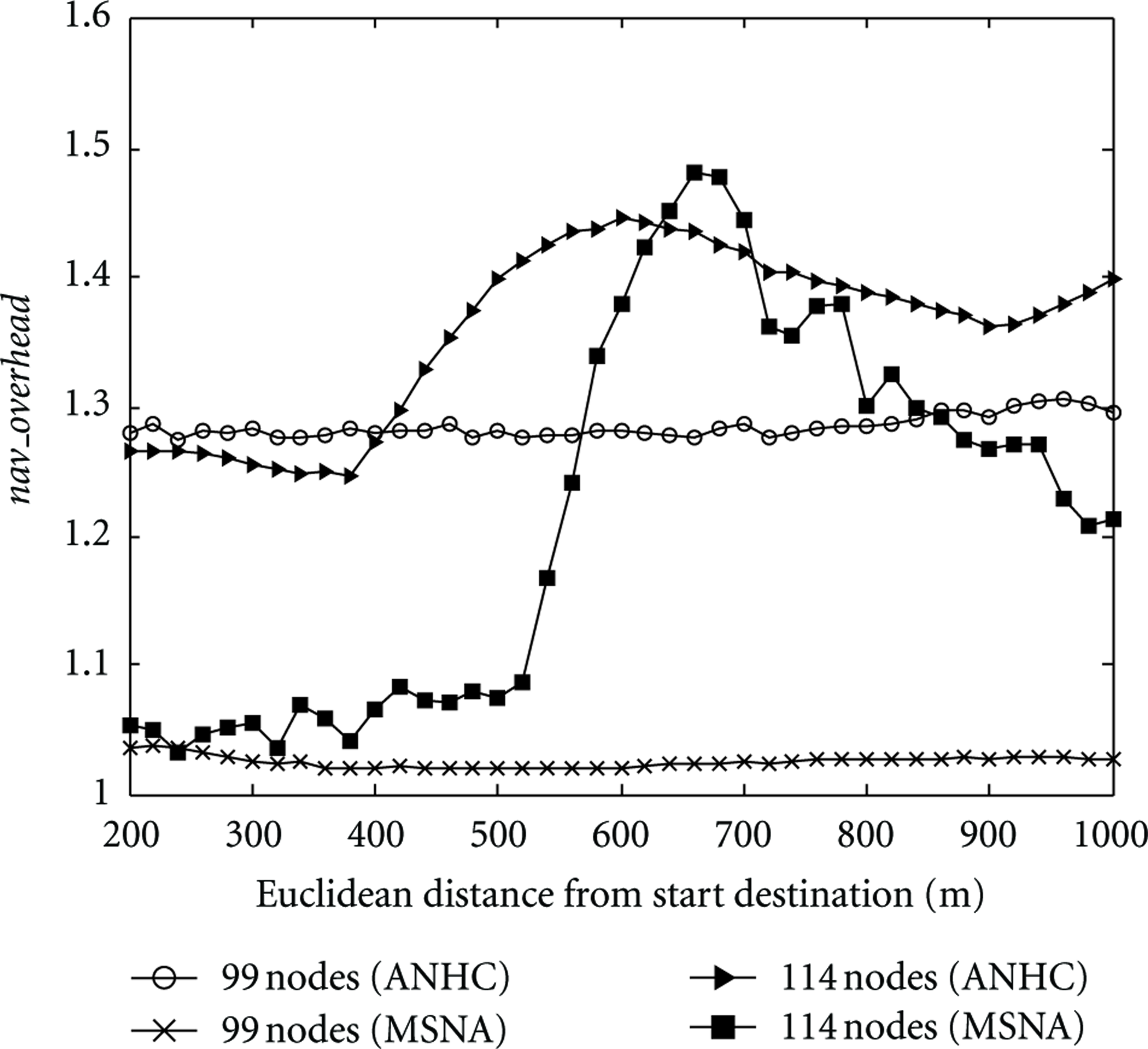
The path cost for a uniform deployed network.
Figure 7 shows that the average costs of paths under four different deployed ways of the network. We randomly set the initial position Sand the destination D in the environment. Through a lot of simulations, we find that the cost of algorithm MSNA is smaller than the algorithm ANHC for each deployed way.

The average path cost for four different deployed ways.
6. Conclusion
In this paper, by characterizing the navigation problem as a path planning problem, we first present a distributed algorithm to construct a path planning infrastructure by uniting the neighbors’ information of each sensor node into a CDS. Then, we propose a path planning algorithm to generate an effective path in the network even under an extreme case. We prove that the distributed algorithm has low time and message complexity and the path planning algorithm guarantees a constant distance cost. Simulation results show that the algorithms produce a smaller infrastructure size and a distance cost. Due to frequent node and link failure, which are inherent in WSNs, to construct a robust a path planning algorithm is our further work.
Footnotes
Acknowledgment
This work is supported by the National Natural Science Foundation of China under Grants no. 61070169, 61170021 and 61201212, The Natural Science Foundation of Jiangsu Province under Grant no. BK2011376, The Specialized Research Foundation for the Doctoral Program of Higher Education of China no. 20103201110018, The Application Foundation Research of Suzhou of China No. SYG201118, SYG201240, SYG201239 and sponsored by the Qing Lan Project.