
Abstract
This paper addresses the problem of the connectivity control and the self-organized deployment/dispersion of a team of mobile ad hoc sensor nodes. First, to reduce redundant communication links while preserving global connectivity, a distributed link removal algorithm is developed that only requires local information of no more than two-hop neighbors. Secondly, for the purpose of preserving essential links while avoiding collisions, a combined piecewise-continuous motion controller is designed to regulate the motion of mobile sensors between two consecutive switches. The proposed hybrid control system can autonomously disperse a team of mobile sensors towards their final configuration with guaranteed connectivity and collision avoidance. Theoretical analysis and computer simulations have confirmed the efficiency and scalability of the proposed schemes.
1. Introduction
The self-organized connectivity control and dispersion of mobile ad hoc sensor networks (MASNs) has been extensively investigated due to its promising potential applications in various fields, such as remote supervision of hazard substances, exploration of unknown fields, and cooperative sensing. Enhancing the coverage of the MASNs could be beneficial, if not critical, for a variety of missions, such as environmental monitoring and disaster management. Moreover, from the wireless communication point of view, the sparse network structure resulted from the enhanced coverage can effectively reduce radio interferences, which is critical for the elimination of excessive message overheads and the reduction of the latency [1]. Furthermore, in energy critical wireless sensor networks, the reduction of message overheads as well as the complexity of the self-organizing algorithms can extend the service lifetime of the systems.
In a mobile sensor network, the mobility of sensor nodes provides the possibility for the nodes to deploy to a configuration with desired properties from an arbitrary initial distribution in a self-organized manner. The aforementioned concept of MASNs has attracted numerous research efforts. Among various topics that have been covered, emphasis is placed on the consensus of a group of mobile sensors, such as flocking and rendez-vous, with a particular interest in coverage and connectivity control. Self-organized dispersion, on the other hand, is another fundamentally essential aspect of the system and requires more research efforts.
Self-organized dispersion of MASNs can be loosely defined as maximizing coverage with a minimum number of mobile sensors [2]. Significant application potentials of self-organized dispersion have recently led to a surge of research attentions. Techniques including inverse agreement control law [3], clique-intensity algorithm [2], and “artificial physics” frame-work [4] have been developed to regulate the evolution of the underlying networks. Coverage control of mobile networks is another promising research area that is closely related to self-organized dispersion, and numerous efforts have concentrated on the deployment of mobile sensors [5–8], coverage control in stationary WASN [9], and coverage control of autonomous agents [10]. Commonly used models include Voronoi diagrams [7, 8] and potential functions [10, 11]. Voronoi diagrams method can partition the field into many subareas dedicated to each mobile sensor, allowing sensors to move to maximize coverage in its own subarea. However, the assumption that mobile sensors can easily detect most of its Voronoi neighbors through local communication may not be satisfied in a real network, due to the limited communication range of the mobile sensors, which may not be sufficient for covering all Voronoi neighbors. Potential function, on the other hand, is able to fulfill the self-organized coverage control of mobile sensor nodes in a more local and distributed manner. The concept of this approach is to imitate the behavior of electromagnetic particles: whenever two electromagnetic particles are too close in proximity, a repulsive force pushes them apart. In mobile ad hoc sensor networks, this method can help move sensors from high density to low density areas, thereby dispersing the team to improving the overall network coverage.
Connectivity control of MASNs is rapidly becoming a hot research topic in the field of multiagent systems, and various strategies have been developed in recent years, including both centralized [12, 13] and decentralized [14–20] approaches. A common way to maintain connectivity in mobile networks is to shrink the communication links between any two neighbors whenever they tend to break [21]. Most studies have attempted to maximize Fiedler value [13] and to add communication links to increase connectivity [22]. However, these approaches often result in a tight network structure with dense communication links, which may largely restrict the mobility of mobile sensors and jeopardize the coverage and cooperation efficiency. More importantly, from the wireless communication point of view, high network density can severely aggravate radio interferences [1]. To deal with these problems, Zavlanos and Pappas [15] proposed a distributed market-based control strategy, which is able to reduce redundant communication links based on local estimation of spanning subgraph. This strategy, however, requires full knowledge of the network structure, which may cause large delay in dense and large-scale networks [23]. In [17], a connectivity control strategy is presented with a particular consideration of the relationship between the communication range and the sensing range, that is, radio range is at least twice the sensing range. The proposed control scheme can guaranteed a connected network with optimized sensing coverage. How to disperse the networked sensors to achieve a sparse topology is not yet discussed. It is also worthwhile to mention that certain topology control methods [24, 25] in ad hoc senor networks have been developed that similarly deal with the issue of removing redundant communication links. However, these works are mainly based on stationary network structure. The important issues of combing global connectivity and dispersion of mobile sensors with respect to mobility control strategy have not been addressed properly.
Contributions
Aiming at bridging the gap between dispersion and connectivity, we first present a distributed link removal algorithm (DLRA) to reduce redundant communication links while preserving global connectivity. The proposed algorithm is fully distributed and only requires local information of no more than two-hop neighbors. Then, by integrating DLRA with a novel combined piecewise-continuous potential function, a distributed connectivity control system is developed to disperse a team of mobile sensors with guaranteed connectivity and collisions avoidance. The present work provides answers to the following questions.
How to remove communication links with respect to global connectivity based only on local information of neighbor status? How to disperse a team of sensors with connectivity preservation, collision avoidance, and limited actuation? Is the generated network structure sparse enough to fulfill dispersion requirement?
The rest of the paper is organized as follows: Section 2 provides necessary terminologies and notations. Section 3 presents the DLRA algorithm that is developed to address the link removal problem with respect to global connectivity. Section 4 introduces a distributed combined piecewise-continuous potential function to control the motion of mobile sensors. Computer simulations are included in Section 5, and this paper is concluded in Section 6 with a discussion of future research works.
2. Problem Formulation
Let the dynamic graph

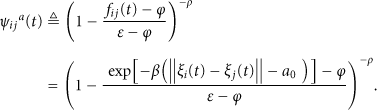
Note that any normalized nonnegative function can be treated as a weighting function. Nevertheless, to associate with the link quality, it is rather a natural choice that
Definition 1.
For any node i in

where β (the value of β depends on the radio frequency, antenna gain, system loss, and environmental factors, etc.) is positive path-loss value, and

Modeling normalized receive signal fading with Euclidean distance, where
Definition 2.
An undirected weighted dynamic graph
Furthermore, consider the vertices in

where
Now the main objectives of this paper can be described as follows:
for any nodes i and j in for the corresponding kinematic system

The trajectories of node j and v denote the possible movements where
3. Distributed Link Removal Algorithm with Respect to Global Connectivity
The objective of this section is to develop a distributed local connectivity control algorithm, aiming at removing redundant communication links to facilitate the self-organized dispersion of mobile sensors with respect to global connectivity.
3.1. Principle of DLRA
Let us first introduce the following definitions which categorize neighboring sensors into two distinctive neighbor relationship sets, namely, physical neighbor set and logical neighbor set.
Definition 3.
Node j is in the physical neighbor set of i, denoted
Definition 4.
Node j is the logical neighbor set of i, denoted
Definition 5.
For any node i in the network, we denote
Based on the aforementioned definitions, the proposed DLRA is described as follows.
Information Exchange
The information that sensor i requires for the link removal algorithm is obtained by periodically receiving Heartbeat messages from all its neighbors in
Selecting Candidate Links to Be Removed
Upon receiving Heartbeat message from each individual physical neighbor, node i updates
Step 1.
Look up neighbor relationship matrix
Upon receiving Hello message from j, update discovery, set time
Step 2.
Update
Synchronized Local Coordination for DLRA (Algorithm 2)
A major challenge when dealing with dynamic network is that, the network topology may be changed during any consecutive switches, due to the movement and leaving/joining of the mobile sensors. Meanwhile, an unpredictable message delay may occur at any time. Therefore, a synchronization process is required for such situations. In particularly, a request and acknowledge mechanism is utilized to dynamically synchronize the disconnection of any redundant communication links between the corresponding vertices. That is, upon the determination of redundant communication link, for example,
Upon receiving Req
3.2. Capabilities and Message Complexity of DLRA
We first prove that the connectivity is guaranteed while the redundant links are removed from the underlying network.
Theorem 6.
Given a network
Proof.
Since neighbor discovery procedure and adding redundant links into
Consider two nodes
Case 1.
Case 2.
The proof of Theorem 6 is completed.
In addition, for Case 1, suppose that there exists a path
Corollary 7.
For any generated subgraph
Furthermore, through removing redundant links, node degree in
Corollary 8.
For a generated subgraph
Proof.
To see contradiction, it is assumed that there are two links
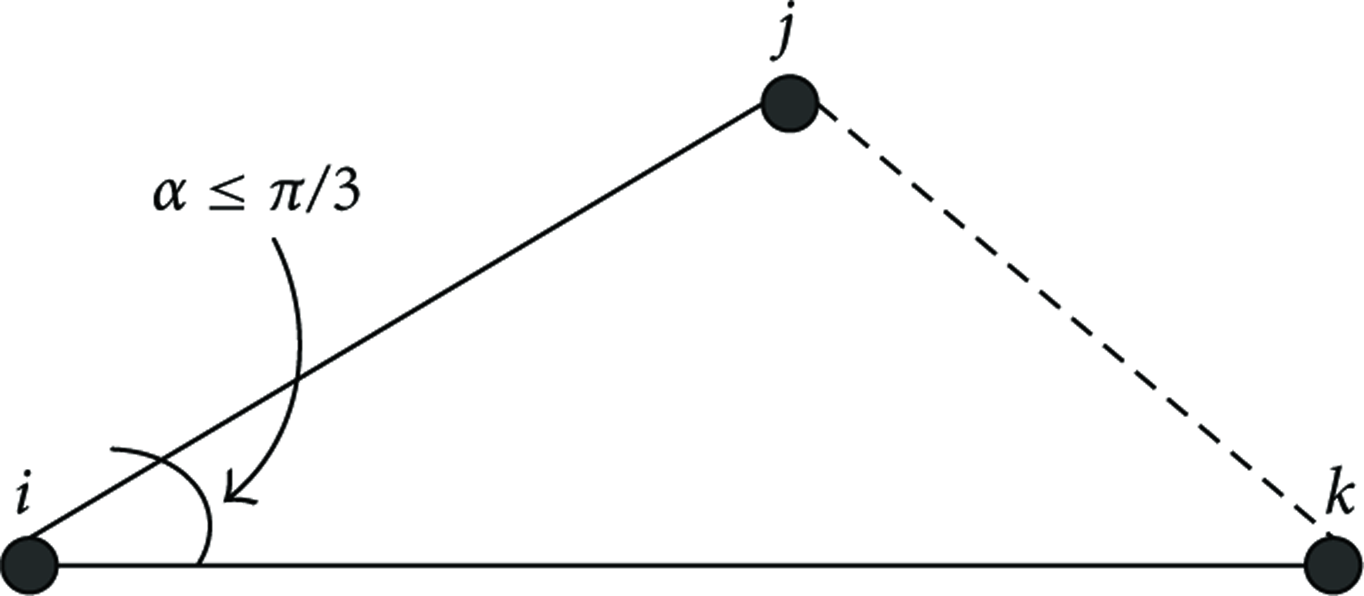
As indicated in proof of Corollary 8,
In addition, the request and acknowledge mechanism in Algorithm 2 guarantees that, despite of trivial one-hop delays of the acknowledge information, the communication links in
Theorem 9.
The worst-case message complexity of DLRA is
Proof.
Since DLRA depends only on two-hop neighbor information to determine redundant communication links, this requires two messages per sensor, and total
Note that for large scale mobile networks with limited communication range, it is an unlikely case that the initial configuration is a UCG. Therefore, the message complexity can be reduced dramatically, which makes DLRA scalable to MASNs with a large number of mobile sensors.
4. Dispersion of Mobile Sensors
The invariance of network structure between any two cons-cutive switches in
We first introduce a repulsive potential function to deal with the collision avoidance between sensor i and all its physical neighbors

where

It is straight forward that, whenever two mobile sensors approach to each other, the repulsive potential
It can be seen from (6) that whenever two mobile sensors with critical communication links move away from each other, the attractive potential
The proposed potential functions entitle us to assign each node i in the network a distributed control law, which is given as the combination of the negative gradients of the two potentials in the

It is easy to observed from (7) that, the potential force can become infinite between pairs of sensors whenever
Denote
Definition 10.
Given a mobile sensor networks with fixed underlying network structure

where
The definition of piecewise-continuous control law gives rise to the development of hybrid connectivity control system ℂ, as is described in Figure 4. In the connectivity control system, the proposed DLRA algorithm will first take every updated location of the mobile sensors as its input matrix to calculate the topology of the network. Therefore, after every interaction process, the redundant communication links will be determined and updated. Meanwhile, the output value of network topology from DLRA will in turn be utilized by the motion controller in every mobile sensor to assign different control functions to every neighboring sensor according to their neighboring types, that is, physical or logical neighbor. And the final output of the system is sensors’ velocity and moving direction in the next step. The bounded velocity is implemented by comparing the output velocity from the controller with the designated maximum speed in the mobile sensor systems.
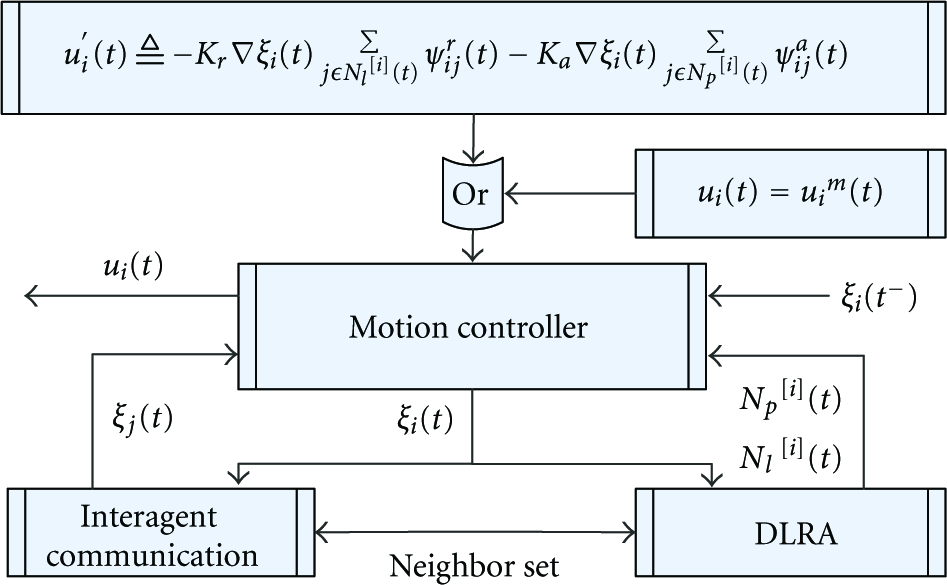
Control system ℂ for the dispersion of MASNs.
Now we can conclude the main result of this paper.
Theorem 11.
Given a MASNs with initially connected underlying network
Proof.
See Appendix.
Furthermore, preserving connectivity without removing redundant communication links often results in a restricted network structure, as indicated in Figure 5(a). We argue that the restriction can be avoided by utilizing DLRA. In particular, from Corollary 7 we proved that the generated core structure (core structure is a subgraph of

deriving the equilibrium distance

Integrating (3) with the aforementioned equation and after some algebra manipulation, it yields

where

Illustration of network structure (a) restricted link
The aforementioned ratiocinations bring us the following result.
Corollary 12.
Considering a MASNs with initially connected underlying network
5. Simulations
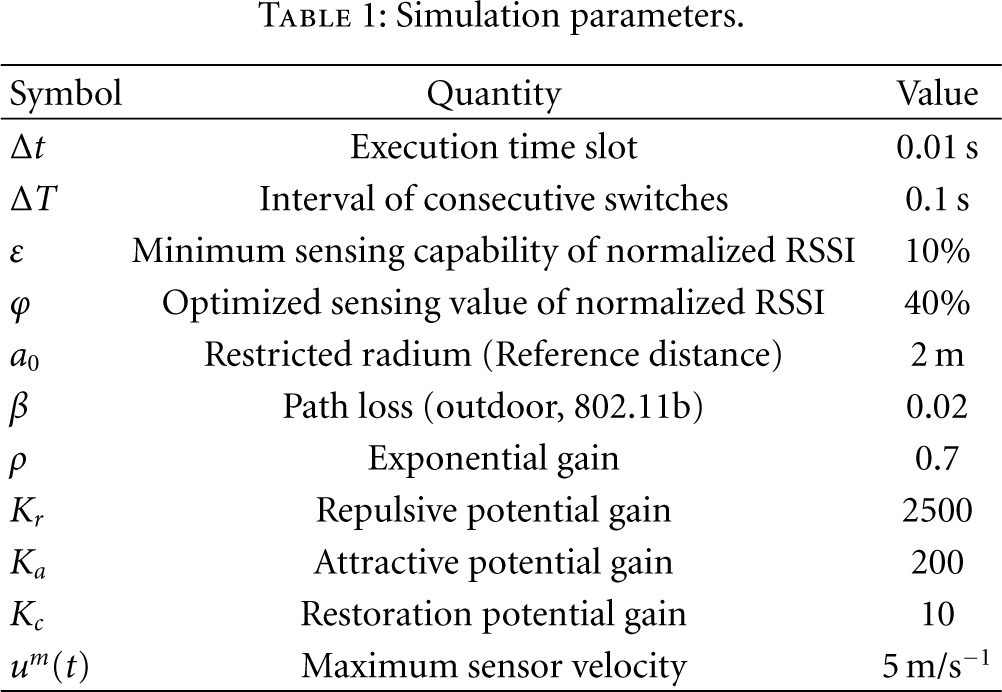
To evaluate the performance of the proposed control system for the self-organized dispersion of mobile sensor networks, a variety of simulations have been conducted, and the results are presented in this section. The simulations are focused on the connectivity control and dispersion of mobile sensor networks in
Simulation parameters.
First, to evaluate the correctness and efficiency of the proposed DLRA, a static simulation is conducted. In the first scenario, 15 static sensors are initially deployed within an area of 20 m × 20 m, as can be seen from Figure 6(a), where dense communication links are observed, after the execution of DLRA, the topology of the wireless sensor network is finally simplified with only 15 communication links (cf. Figure 6(b)). In case of large sensor networks, a 100 sensors scenario is then performed, the initial configuration of the network topology can be found in Figure 6(c). The final results from DLRA is shown in Figure 6(d), where the sensor network becomes extremely sparse with only a few redundancy.

Simulation results for DLRA. (a) Original topology for 15 nodes; (b) final topology for 15 nodes; (c) original topology for 100 nodes; (d) final topology for 100 nodes.
To evaluate the proposed connectivity control system ℂ. We first simulate the dispersion of 10 sensors initially located within 20 m × 20 m

Simulation results for 2D distributed mobile multiagent dispersion. (a)–(d) Evolution snapshots for 10 nodes; (f)–(i) evolution snapshots for 100 nodes; (e) mobile sensor's trajectories in 10 nodes case; (d) mobile sensor's trajectories in 100 nodes case.

Simulation results for 2D distributed mobile multiagent dispersion. (a) The converge of average number of physical neighbors and logical neighbors during simulation in 10 nodes case; (b) the converge of average number of physical neighbors and logical neighbors during simulation in 100 nodes case; (c) average velocity of mobile sensors during simulation in 10 nodes case; (d) average velocity of mobile sensors during simulation in 100 nodes case.
We further conduct a simulation for 100 sensors to verify the scalability of the proposed approach. Similarly to the case of 10 sensors, sensors are initially location in a
The self-organized dispersion of MASNs in

Evolution trajectory (snapshot) of 3D distributed dispersion of mobile sensors in different scales. (a)
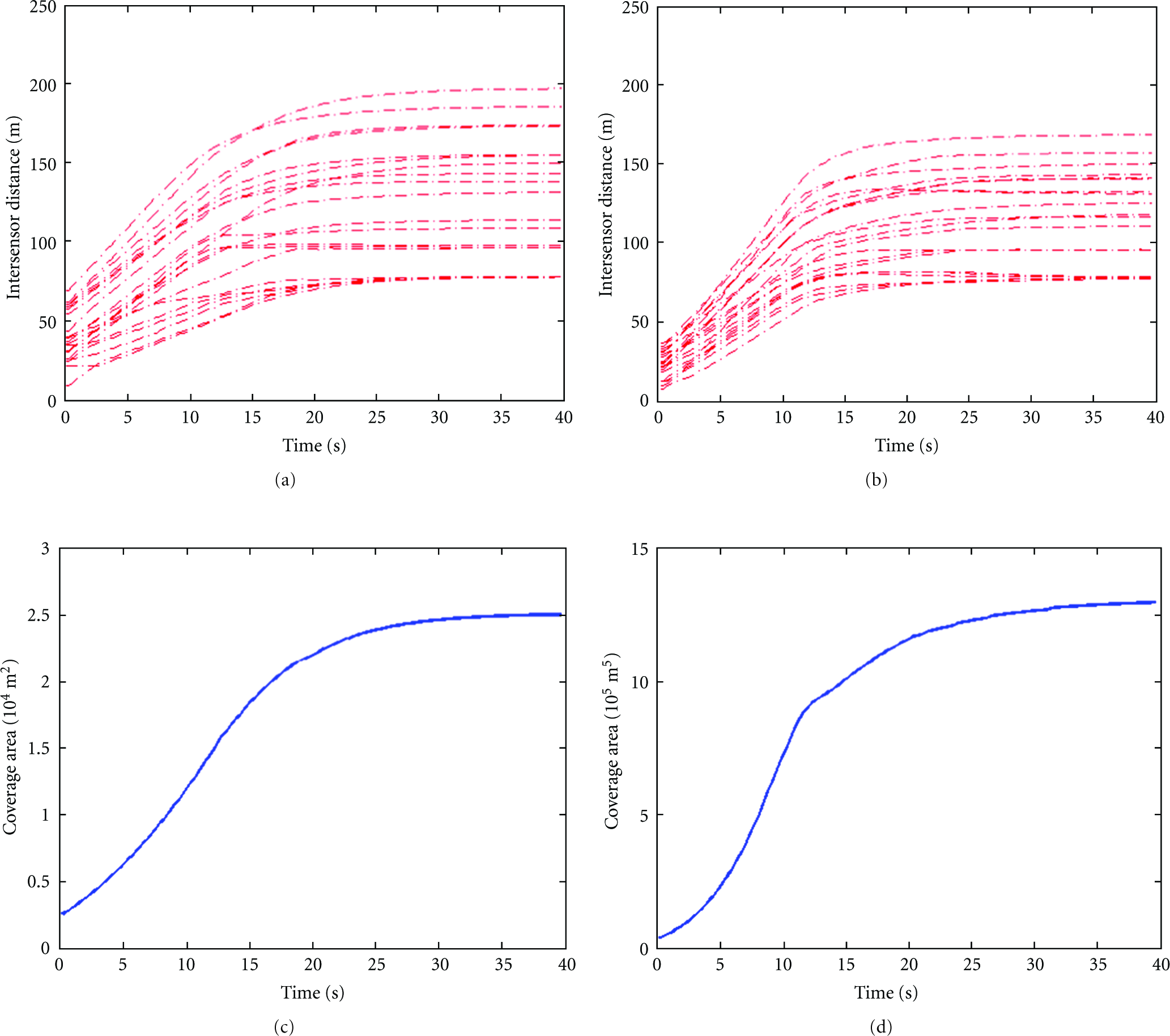
The efficiency of the proposed connectivity control system ℂ. (a) Interagents distances in case of 2-dimensional coverage optimization; (b) interagents distances in case of 3-dimensional coverage optimization; (c) coverage area in case of 2-dimensional coverage optimization; (d) coverage space in case of 3-dimensional coverage optimization.
It is worthwhile to notice that simulation results in
Correctness
A variety of simulations in
Sensibility
The required time for reaching the final configuration is distinctive in
Sparseness
Despite of dimension and network capacity, the final configurations of the networks are always sparse with small node degrees.
6. Conclusions
Self-organized dispersion of mobile ad hoc sensor networks with guaranteed connectivity and collision avoidance is studied in this paper. A distributed self-organized control system combined with a local dynamic link removal algorithm, namely, DLRA, is proposed to reduce redundant communication links and regulate the dispersion of mobile sensors. The proposed control system can disperse a team of mobile sensors with guaranteed connectivity and collision avoidance, and the DLRA does not require access to the whole topology information, and thus, the proposed approach is scalable and will not invite excessive delays and communication overhead in large scale networks.
Several extensions to this presented work will be studied in future research: to apply the mobile sensor networks into indoor environment, we plan to study the dispersion of networked mobile sensors in nonconvex environments; the impact of wireless communication on the connectivity of multiagent system is another promising topic. The proposed approach can also be extended for dispersion in leader-follower system and potential applications in hazardous and battlefield environments.
Footnotes
Appendix
Acknowledgments
The work is cosponsored by Nature Science Foundation of China (Grant nos. 61272432, 61202508), and China Postdoctoral Science Foundation (Grant no. 2011M500243). The authors would like to gratefully acknowledge the constructive and thorough comments of the reviewers, which is very helpful for improving the quality of the paper. The authors appreciate the constructive suggestions in the simulation methodology from Professor Michael M. Zavlanos. They also thank Dr. Yan C. Wang for the enlightening discussions in topology control algorithms.