
Abstract
The problem of environmental monitoring using a wireless network of chemical sensors with a limited energy supply is considered. Since the conventional chemical sensors in active mode consume vast amounts of energy, an optimisation problem arises in the context of a balance between the energy consumption and the detection capabilities of such a network. A protocol based on “dynamic sensor collaboration” is employed: in the absence of any pollutant, the majority of sensors are in the sleep (passive) mode; a sensor is invoked (activated) by wake-up messages from its neighbors only when more information is required. The paper proposes a mathematical model of a network of chemical sensors using this protocol. The model provides valuable insights into the network behavior and near optimal capacity design (energy consumption against detection). An analytical model of the environment, using turbulent mixing to capture chaotic fluctuations, intermittency, and nonhomogeneity of the pollutant distribution, is employed in the study. A binary model of a chemical sensor is assumed (a device with threshold detection). The outcome of the study is a set of simple analytical tools for sensor network design, optimisation, and performance analysis.
1. Introduction
Development of wireless sensor network (WSN) for a particular operation scenario is a complex scientific and technical problem [1, 2]. Very often this complexity resides in establishing a balance between the peak performances of the WSN prescribed by the operational requirements (e.g., minimal detection threshold, size of surveillance region, detection time, rate of false negatives, etc.) and various resource constrains (e.g., limited energy supply, limited number of sensors, limited communication range, fixed detection threshold of individual sensors, limited budget for the cost of hardware, maintenance, etc.). The issue of resource constraints becomes even more relevant for a network of chemical sensors that are used for the continuous environmental monitoring (air and water pollution, hazardous releases, smoke, etc.). The reason is that a modern chemical sensor is usually equipped with a sampling unit (a fan for air and a pump for water), which turns on when the sensor is active. The sampling unit usually requires a significant amount of energy to operate as well as frequent replacement of some consumable items (i.e., cartridges, filters). This leads to the critical requirement in the design of a WSN to reduce the active (i.e., sampling) time of its individual sensors.
One attractive way to achieve an optimal balance between the peak performance of the WSN and its constraints in resources mentioned above is to exploit the idea of dynamic sensor collaboration (DSC) [3, 4]. The DSC implies that a sensor in the network should be invoked (or activated) only when the network will gain information by its activation [4]. For each individual sensor, this information gain can be evaluated against other performance criteria of the sensor system, such as the detection delay or detection threshold, to find an optimal solution in the given circumstances.
While the DSC-based approach is a convenient framework for the development of algorithms for optimal scheduling of constrained sensing resources, the DSC-based algorithms involve continuous estimation of the state of each sensor in the network and usually require extensive computer simulations [3, 4]. These simulations may become unpractical as the number of sensors in the network increases (e.g., “smart dust” sensors). Even when feasible, the simulations can provide only the numerical values for optimal network parameters, which are specific for an analysed scenario, but without any analytical framework for their consistent interpretation and generalisation. For instance, the scaling properties of a network (the functional relationship between the network parameters) still remain undetermined, which prevents any comprehensive optimisation study.
This motivates the development of another, perhaps less rigorous, but certainly simpler approach to the problem of network analysis and design. The main idea is to phenomenologically employ the so-called bioinspired (epidemiology, population dynamics) or physics-inspired (percolation and graph theory) models of DSC in the sensor network in order to describe the dynamics of collaboration as a single entity [5–10]. Since the theoretical framework for the bio- or physics-inspired models is already well established, we are in the position to make significant progress in the analytical treatment of these models of DSC (including their optimisation). From a formal point of view, the derived equations are ones of the “mean-field” theory, meaning that instead of working with dynamic equations for each individual sensor we only have a small number of equations for the “averaged” sensor state (i.e., passive, active, faulty, etc.), regardless of the number of the sensors in the system. A reveling example of the efficiency of this approach is the celebrated SIR model in epidemiology [11]. For any size of population, the SIR model describes the spread of an infection by using only three equations, corresponding to three “infectious” classes of the population: susceptible, infectious, and recovered.
The analytic or “equation-based” approach often leads to valuable insights into the performance of the proposed sensor network system by providing simple analytical expressions to calculate the vital network parameters, such as detection threshold, robustness, responsiveness, and stability and their functional relationships.
In the current paper, we develop a simple model of a wireless network of chemical sensors, where dynamic sensor collaboration is driven by the level of concentration of a pollutant (referred to as the “external challenge”) at each individual sensor. Our approach is based on the known analogy [10] between the information spread in a sensor network and the epidemics propagation across a population. In this analogy, the infection transmission process corresponds to message passing among the sensors. A chain reaction in transmission of an infection is called the epidemic. In the context of a sensor network, a chain reaction will trigger the network (as a whole) to move from the “no pollutant” state to the “pollutant present” state, which will indicate the presence of an external challenge.
The paper shows that the adopted epidemics or population-inspired approach can provide a reliable description of the dynamics of such a sensor network. The simple analytical formulas (scaling laws) derived from the model express the relationships between the parameters of the network (e.g., number of sensors, their density, sensing time, etc.), the network performance (probability of detection, response time of a network), and the parameters of the external challenge (environment, pollutant). As an example of application of the proposed framework, we performed a simple optimisation study. Numerical simulations are carried out and presented in the paper in support of analytic expressions.
Although the model presented in this paper is specific to a network of chemical sensors, the underlying analytical approach can be easily adapted to other applications and other types of networks by a simple change of the model of environment and sensor.
2. The Model of Environment
The external challenges are modeled by a random time series which mimics the turbulent fluctuation of concentration at each sensor of the network. In this approach, the fluctuations in concentration C are modeled by the probability density function (pdf) of C with the mean

The measured concentration time series can be generated by drawing random samples from the probability density function given in (1) at each time step. The random number generator is implemented using the inverse transform method based on the following steps [13]:
draw a sample u from the standard uniform distribution: compute the value of C that satisfies the value of C computed in the previous step is a random sample drawn from the desired probability distribution.
The cdf


In order to produce spatial correlations that comply with the well-known scaling properties of turbulent dispersion, a special “swapping” algorithms was implement. This recursive algorithm mimics the chaotic fluctuations occurring in the real turbulent flows (for details, see [14]).
The proposed framework allows to implement a reasonably realistic model of the contaminated environment (i.e., to generate the concentration realisation at each sensor over time), see Figure 1. Due to a universal nature of turbulence, it can be used to simulate performance of WSN in detection of either airborne and waterborne releases. The parameters γ and ω are typically estimated from geophysical observation (meteorological and organological) and will be assumed known.

Example for concentration realisation for a plume-like flow (a) and the selected area of the flow with higher resolution (b).
The geometrical complexity of the turbulent flow can be incorporated in the theoretical framework (2) by assuming a temporal and spatial variability of the mean concentration filed
3. The Model of a Chemical Sensor
We adopt a simple binary (or “threshold”) model of a sensor, with the sensor reading V given by

Using (3) and (4), it is straightforward to derive the probability of detection for an individual sensor embedded in the environment characterised by (2)

4. Modeling and Analysis of Network Performance
Our focus is a wireless network of chemical sensors with dynamic collaboration. We assume that N identical sensors (i.e., with the same detection threshold
We will model the following network protocol for dynamic collaboration. Each sensor can be only in one of the two states: active or passive. The sensor can be activated only by a message it receives from another sensor. Once activated, the sensor remains in the active state during an interval of time
The WSN following this protocol can be considered as a system of agents, interacting with each other (by means of message exchange) and with the stochastic environment (by means of sampling and probing). The interactions can change the state of agents (active and passive). From this perspective, this WSN is similar to the epidemic SIS (susceptible-infected-susceptible) model [11], in which an individual can be in only two states (susceptible or infected), and the change of state is a result of interaction (mixing) between the individuals (which corresponds to the exchange of messages in our case). Thus, a dynamic (population) model for our system [11] is as follows:


The next step is to express α in terms of the parameters of our system by invoking physics-based arguments used in population dynamics [11]. It is well known that parameter α in (6) describes the intensity (contact rate) of social interaction between individuals in the community, so we can propose (see [11, 17])


It is worth noting that by introducing nondimensional variables


The system (6)-(7) combined with the condition




We can see that if

A fraction of active sensors

From (14), (17), it follows that an “epidemic threshold” for the sensor network is simply

The expressions (16), (17), and (18) are the main analytical results of the paper. For a given level of external challenges (i.e.,
The final analytical expressions enable us to maximize the network information gain and optimize other parameters. For example, from (16), we can readily infer the important scaling properties of the network performance:

5. Information Gain of Collaboration
We have explained earlier that the concept of DSC is important for a network with limited energy/material resources. But the question remains will a network with DSC be inferior (in terms of detection performance) in comparison with a benchmark network where all sensors operate independently of each other and only report their (positive) detections of chemical pollution to the central processor for decision making? Clearly, such a benchmark network would be very expensive to run (all sensors would have to be active all the time), but could provide excellent detection performance.
In this section, we show that, under a certain condition, the network with DSC can provide superior detection performance compared to the benchmark network. Let us assume that we have

The value of the parameter δ can be also estimated based on the following arguments. Let us assume that our aim is to detect a level concentration



Another important criteria for epidemic protocol can be derived by comparison of amplitude of “detectable events” for the same number of sensors in the network with DSC with the system of N-independent sensors. For the network with DSC, it is


The condition

6. Numerical Simulations
In support of analytical derivations presented above, a network of chemical sensors operating according to the adopted protocol for dynamic collaboration was implemented in MATLAB. A comprehensive report with numerical simulations result will be published elsewhere; here, we present only some illustrative examples.
For consistency, a 1000 m × 1000 m surveillance region populated by
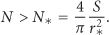
Results of numerical simulations: the fraction of active sensors in the network over time for the different communication range
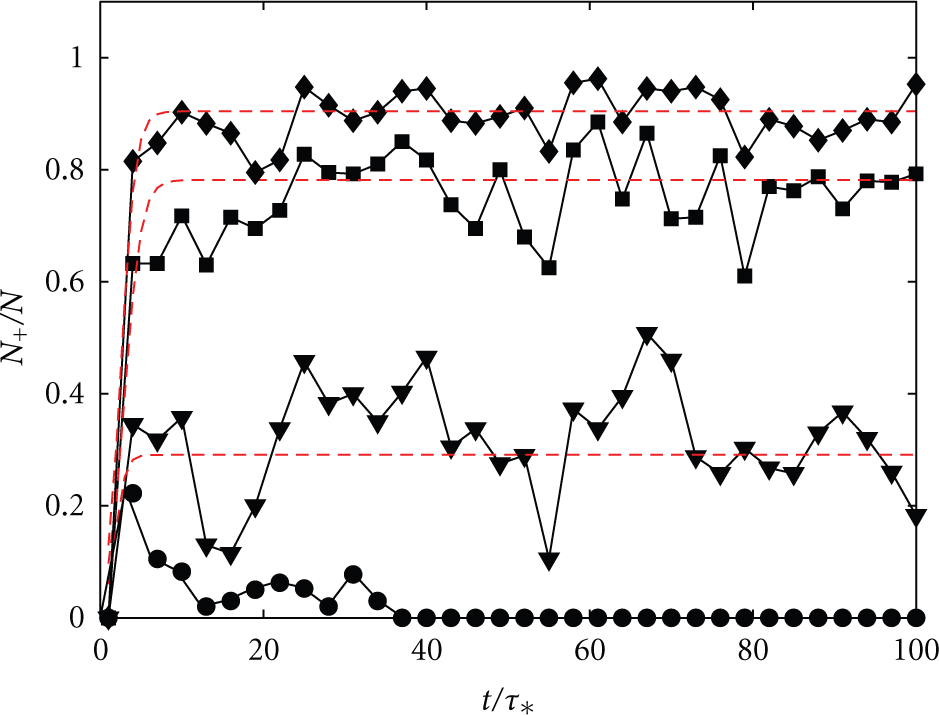
Results of numerical simulations: the fraction of active sensors in the network over time for the different threshold of individual sensor
Overall, we found that the simulation output is much more sensitive to the changes of communication range than to the threshold of an individual sensor (see range of parameters depicted in Figures 2 and 3). In all cases, we observed the transition of
In order to validate our simple model for parameter α, we performed the following study. For each simulation, we derived the value of

Simulation and theoretical predictions of parameter α:
To validate further the alignment between the computer simulations and the proposed mathematical model, we numerically estimated some scaling properties of the network system (i.e., (9), (19)). Firstly, we derived the scaling properties from computer simulations and then compared them to the theoretical predictions. In general, we found that all trends of the derived scaling do agree with theoretical expressions in (19), but the quantitative agreement may significantly vary from case to case. As an illustration, in Figure 5, we present the plot of dependency of α against p in log-log scale. The extracted exponent corresponds to

Parameter α as a function of p extracted from numerical simulations in log-log scale. The dashed line corresponds to the power-law fit
The results of numerical simulations presented above serve to verify that the “information epidemic” does occur in the wireless network of chemical senors. This also implies that the proposed theoretical framework may lead to a gain in the energy consumption that may result in the significant advantages in operational deployment of such systems. More detailed analysis of the optimal values of parameters satisfying threshold conditions (18), (23), and (26) and lead to the optimal performance of WSN will be reported in separate publications.
7. Refinements of the Model
The disagreement described above is due to the implicit assumption of “homogeneous mixing” which we made in equations (6)-(7). The homogeneous mixing manifests itself in the bilinear form of the interaction terms on the RHS of (6)-(7). This bilinearity means that the number of new “infected” sensors is proportional to the product of the number which is currently “infected” and the number which is currently “susceptible.” Effectively it means that all passive sensors are equally likely to be activated. This assumption holds only if the majority of activated (“infected”) sensors are far away from each other (i.e., at the distances


Examples of dense (a) and sparse (b) wireless sensor networks.
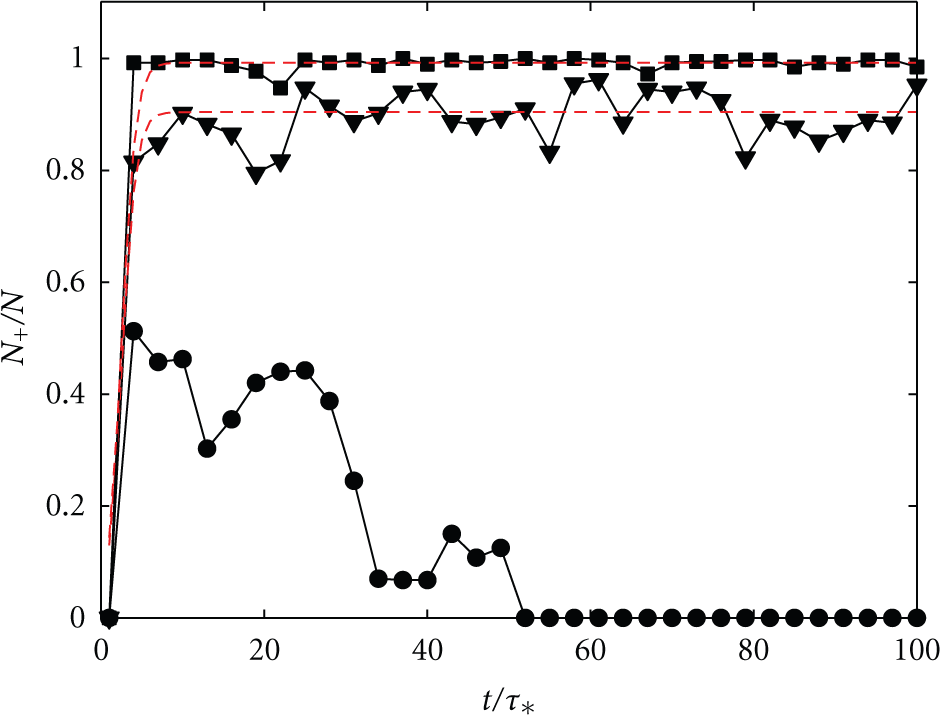
Effect of parameter ν in the model (28) on the simulation data fit: dashed line:
Similarly to the epidemiological models (see [11]), incorporation of the spatial inhomogeneity can be achieved by adding the appropriate diffusion terms on the LHS of (6) and (7):

An important property of the system (29) is the existence of analytical solutions in the form of traveling waves, propagating with the velocity
Another interesting extension of the proposed model is the introduction of the concept of a faulty sensor, a sensor which is no longer available for sensing and networking. This state of a sensor would correspond to the removed population segment in the epidemiological framework and can be attributed to any kind of faults (flat battery, software malfunction, hardware defects, etc.). As in the celebrated SIR epidemiological model [11], a new state results in the third equation for
8. Conclusions
We developed a “bioinspired” model of a network of chemical sensors with dynamic collaboration for the purpose of energy conservation and information gain. The proposed model leverages on the existing theoretical discoveries from epidemiology resulting in a simple analytical model for the analysis of network dynamics. The analytical model enabled us to formulate analytically the conditions for the network performance. Thus, we found an optimal configuration which, within the underlying assumptions, yields a balance between the number of sensors, detected concentration, the sampling time, and the communication range. The findings are partly supported by numerical simulations. Further work is required to address the model refinements and generalisations.
Footnotes
Acknowledgments
The authors would like to thank Ralph Gailis, Ajith Gunatilaka, and Chris Woodruff for helpful technical discussions and Champake Mendis for his assistance in the software implementation of the proposed model.