
Abstract
Exploitation of wireless communications in various automation applications brings indisputable benefits, which has proliferated research efforts in the field during the recent years. However, underlying wireless communication systems introduce problems to the wireless control systems, such as variable delays, information loss, and limited throughput. By using multiple frequency bands simultaneously, the performance of a wireless network can be enhanced. Since many control applications have strict requirements on delay and delay variations, it is important to understand the impact of communication systems on the performance of wireless automation systems with respect to delay. Hence, in this paper, we study how different communication parameters, such as packet arrival rate, number of channels, and packet size, affect the performance of control systems. We also derive bound on control system performance given the network properties. Our results show the tradeoff between the performance of the wireless multichannel communication system and the automation system. These results can, for example, be further exploited in system design to find out the maximum packet arrival rate with given control parameters.
1. Introduction
Current wireless communication technologies offer novel opportunities for automation applications because of low installation costs, rapid deployment, and flexibility [1]. However, a wireless network in the middle of the control loop introduces challenges as well. Packet drops, delay variations, limited throughput, and restricted resources of low-cost wireless devices characterize the performance of wireless automation systems. The performance of a wireless network can be improved by exploiting multiple frequency channels simultaneously to ensure robustness, minimize delay, and/or enhance throughput, which in the end enhance the performance of a wireless automation system. For example, in IEEE 802.15.4 networks it would be possible to exploit 16 orthogonal frequency channels simultaneously; however, the standard does not enforce it [2].
In wireless automation applications, unreliability of the wireless system causes significant problems. In this paper, we focus especially on the challenges inflicted by delay and delay variations, which are of significant importance in various contexts in wireless automation, such as studying the stability of networked control systems [3] or in industrial wireless sensor networks [1]. Moreover, the impact of delay of IEEE 802.15.4 systems on control applications has been studied, for example, in [4]. However, none of the previous studies has considered multichannel communications nor the relationship between communication and control parameters in such systems.
Time synchronized mesh protocol (TSMP) [5] is a widely used scheduled medium access control (MAC) protocol in industrial wireless automation, which allocates time-frequency blocks for data transmissions. Scheduled MAC protocols perform well in static networks where data are generated and sent periodically. Nevertheless, contention-based MAC protocols are also very popular in different wireless systems due to their simplicity; consider, for example, the Carrier Sense Multiple Access with Collision Avoidance (CSMA/CA) technique used in IEEE 802.11 systems. In case of event-triggered wireless control applications, unsynchronized operation, or random sampling, contention-based MAC protocols are preferred over scheduled solutions because of their flexibility.
The additional flexibility of the contention-based MAC protocols does not come without price. Contention causes random delay variations—jitter—that needs to be taken into account when designing control systems. For linear time invariant (LTI) plants, Kao and Lincoln [6] have defined an upper bound for the delay variations, known as the jitter margin that guarantees the loop stability as long as the time varying delay does not exceed the margin. In case of contention-based MAC, we can never provide absolute guarantee that the bound is not violated. However, if the cumulative probability density function (CDF) of the delay is known, a statistical bound can be given such that stability of the plant is guaranteed with the given probability. The stability limit of the control loop defines an upper bound for the arrival rate of packets to the network, which in turn can be translated to maximum number of simultaneously active control loops and other devices that the network can have.
We studied the performance of different contention-based multichannel MAC approaches in [7] and showed that the Generic Multichannel MAC (G-McMAC) protocol, presented in [8] in detail, outperforms other approaches with respect to average access delay. Moreover, simulation results reported in [8] imply that G-McMAC is suitable for industrial wireless sensor applications. Therefore, we focus on G-McMAC in this paper and broaden our multichannel MAC analysis by studying the effect of multichannel communications on wireless control systems. For this, we need to extend our previous results by deducing the delay distribution for G-McMAC. In addition, we derive the variance of delay for the protocol and analyze the stability limits of G-McMAC extensively.
The main contributions of this paper are the following. We derive the delay distribution for G-McMAC by calculating an approximation of the CDF of the delay. By using these results we analyze the impact of multichannel communications on application performance by investigating a wireless control loop and studying the relationship between different communication and control parameters. The results of this paper show the interdependencies between communication parameters, such as packet arrival rate, number of available channels and packet size, and controller tuning and performance.
This paper is organized as follows. First, in Section 2 we present the used system models and justify the use of G-McMAC. Next, we derive average access delay and variance of delay for G-McMAC in Section 3 together with the approximation of the delay CDF. In Section 4 we derive the formulas for controller tuning in wireless automation and then, by using these results, we analyze the impact of multichannel communications on wireless automation in Section 5. Finally, conclusions are presented in Section 6.
2. Background
In this section, we first describe the used networked control and communication system models. Poisson packet arrival model is commonly used to model random, independent message arrivals in communication systems such that the packet arrival process follows a Poisson distribution. Justification for the use of Poisson arrival processes in wireless automation is given in this section. We also show that G-McMAC outperforms other existing multichannel MAC solutions with respect to average access delay.
2.1. Networked Control Model
The networked control model is depicted in Figure 1, where the feedback information is communicated over a contention-based multiple access network. A sensor node monitors the state of a plant. Multiple control loops exploit the same wireless network such that the data from sensors are transmitted to controllers over the shared transmission medium. Controllers compare this information to the reference values and then send commands directly to plants to steer the operations accordingly.
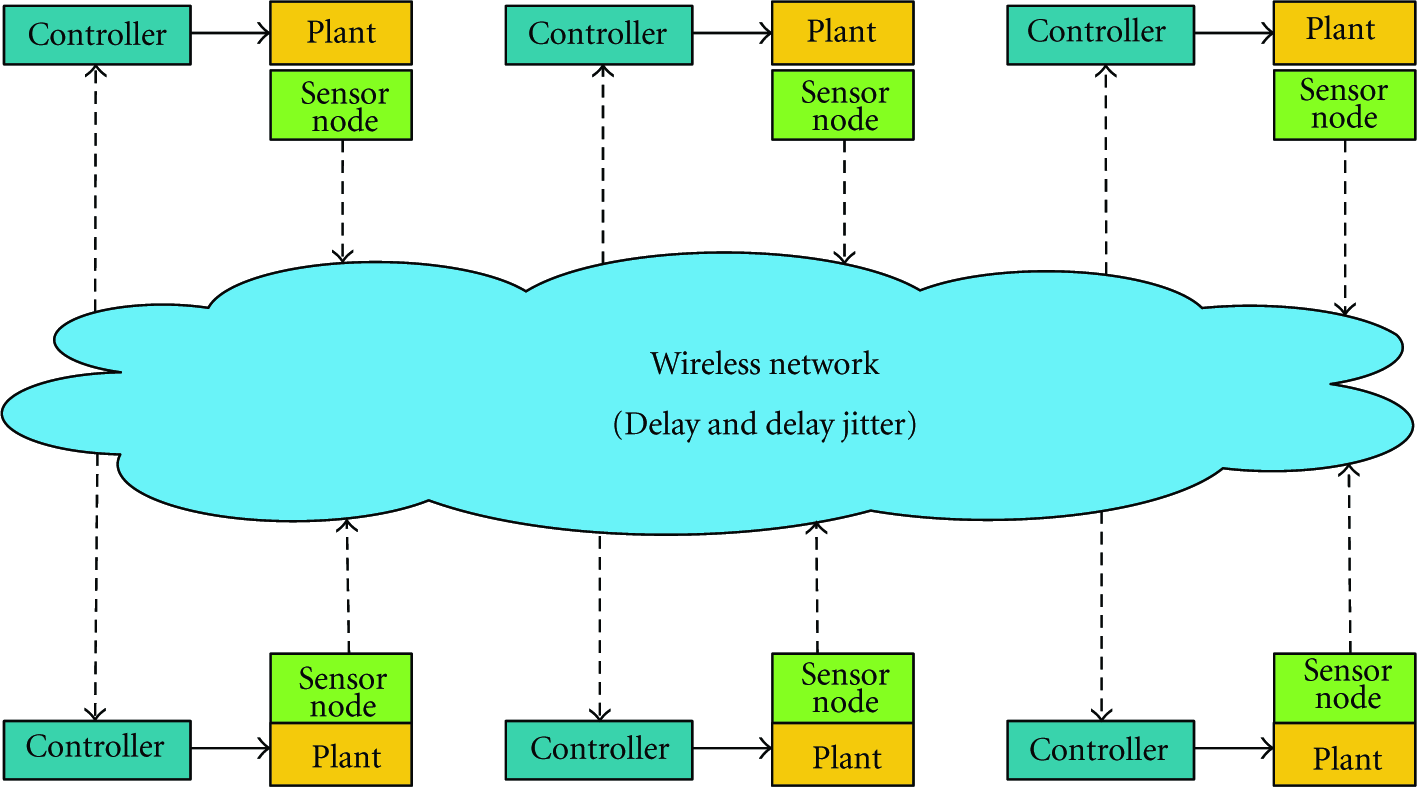
Networked control model.
The exploitation of wireless networks in control applications introduces challenges to the system design [1]. Wireless communication is inherently unreliable, and additionally several contending communication flows make reliable and fair medium access difficult. These issues introduce packet drops, delay variations also known as delay jitter [6], and limited throughput for the control applications to cope with. In control systems, delay jitter is taken into account by using jitter margins, which define the maximum allowable delay for the communication system.
The challenge is to analyze the overall system and succeed in guaranteeing performance bounds on the network and control systems so that the overall system is stable [3]. Stability of both of the systems should be ensured since if the communication network is unstable, the control system will be unstable as well. The whole system should be designed such that the best performance is achieved, ultimately measured at the application layer, in this case the wireless control.
To establish the connection between the network and control performances, we note that delay in a feedback loop reduces the phase margin, and thus the stability margin of control. Delay margin and jitter margin are analogous concepts, such that the control loop needs some margin to guarantee stability [9]. The tradeoff is that with increased delay and delay jitter in the feedback loop, see Figure 1, the gain margin of the control loop is decreased. To compensate for the increasing delay or delay jitter induced by the network, the robustness of control has to be increased to guarantee stability of the control loop, which means loss of performance. In the wireless control system case, there is thus a clear relationship between the performance of the network and the control loop, such that decreasing delay and delay jitter enables more robust and higher control performance. In this paper, we link the delay distribution of the network to the control tuning and performance of the wireless control loop.
2.2. Communication System Model
In this paper, the focus is on multichannel media access control in wireless automation applications. Since optimal FDMA/TDMA schemes introduce a lot of complexity and additional messaging to maintain, for example, the schedule, we restrict our study to flexible random access schemes. Moreover, in case of event-triggered automation, unsynchronized operation, or random sampling, messages are not generated periodically and thus, predetermined scheduling algorithms are infeasible.
Each device is equipped with one half-duplex transceiver, which makes dedicated control channel approaches, such as [10], impracticable. Throughputs and delays of multichannel MACs can be modeled similarly as single-channel systems with the exception that now multiple channels can be exploited. We presume that a good quality common control channel (CCC) is always available for G-McMAC. All the nodes in a network are awake constantly and have identical channel conditions.
If a packet transmission fails for some reason, retransmission of the packet will be attempted until successful transmission takes place, that is, packets will not be discarded in any case. For the theoretical analysis, we divide the operation into multiple discrete time-slots and assume fixed packet sizes along with perfect time-synchronization among the nodes. The length of a time slot τ is defined to correspond to the maximum propagation delay of resource request and acknowledgement messages. Channel sensing time is also equal to τ, and we neglect channel switching penalty for the sake of simplicity. We only consider slotted systems with an infinite number of users.
Packet arrival process is modeled as a Poisson process with rate g packets/sec, which includes both new and retransmitted, packet arrivals. Thus, the network or a link handles one packet in a given time slot

To calculate an estimate of τ, we use values from [11] where the size of resource request and acknowledgment packets was 8 bytes, which leads to a transmission delay of
2.3. Poisson Arrivals in Wireless Automation
Poisson distributions are widely used to study the performance of communications systems by modeling the number of generated packets with a Poisson distribution. Respectively, this means that the interarrival times of packets are exponentially distributed. Such packet arrival processes occur in wireless automation applications as will be discussed next.
Many practical processes are driven by Gaussian noise. As an example, we consider a send-on-delta method, where information is sent only if the measured value changes above some threshold compared to the previously sent value. Number of high and low crossings of stationary Gaussian processes obeys Poisson distribution [12]. Therefore, the time between consecutive level crossings is exponentially distributed and hence, interarrival times of packets are exponentially distributed as well. Then, the parameter g is directly related to the used threshold such that smaller thresholds lead to higher values of g.
In addition, Poisson arrival processes occur in case of unsynchronized sensors. If sensors are unsynchronized their packet generation times can be seen as uniformly distributed. Consequently, inter-arrival times of packets are exponentially distributed [13]. By denoting the number of sensors by M and the sampling period by h, the process that is obtained by summing the arrivals of all sensors may be approximated by a Poisson process with intensity
Furthermore, in the context of random sampling, Poisson processes have been under investigation as well. Poisson sampling process was studied in [14] by focusing on networked estimation, while in [15] the focus was on controller design in case of Poisson distributed observations. Since the sum of independent Poisson distributed variables follows the same form with the total rate equaling the sum of the component rates, Poisson distributed arrival processes occur on the network scale as well. Hence, we conclude that Poisson distributed packet arrivals occur in different wireless automation applications and utilization of Poisson packet arrival processes in analyzing the performance of wireless automation is justified.
2.4. G-McMAC and Performance Comparison
G-McMAC is designed especially for industrial wireless sensor applications. The protocol is presented in detail in [8], and here we present only the relevant information related to this paper. In G-McMAC, if a node generates a packet, it first senses the desired data channel to make sure that it is idle. After this, if the channel is sensed busy, a random back-off will be induced. On the other hand, if the channel is free, the RTS/CTS message exchange will be carried out on the CCC. The receiver will sense the desired data channel before replying. Finally, if the message exchange was performed successfully, nodes can start the data transmission on the chosen data channel. Figure 2 illustrates the operation of a transmitter and receiver in detail.

Delay performance of multichannel MAC protocols.
It is evident that by exploiting multiple frequency bands for data communications simultaneously, access delays can be reduced. In our previous work, we have studied delay-throughput performance of different multichannel protocols in ad hoc networks [7]. We derived average access delays and throughputs for different approaches by considering a Poisson packet arrival process. Theoretical results were then verified by simulations. We compared the performance of G-McMAC to a split phase-based approach, called MMAC [16], and to a common hopping-based approach, called SYN-MAC [17]. Performance of different multichannel approaches with respect to delay is depicted in Figure 3 using the previously derived theoretical results.

General operation of G-McMAC.
We use
3. Delay Analysis of G-McMAC
In this section, we first derive the formulas for average access delay and variance of delay for G-McMAC and validate theoretical results by Matlab simulations. We use a similar approach as in [18] for deriving the equations. Secondly, since the delay distribution is not known, we give an approximation of the CDF of the delay and verify the correctness of the approximation by simulations. Finally, we analyze the delay performance and the stability of the protocol by using the derived theoretical results. These results will be used to carry out analysis and to study the impact of delay on a wireless automation application in Section 5.
3.1. Derivation of Average Access Delay
Access delay of a packet depends on the number of retransmissions. In case of G-McMAC, transmission of a packet may have to be rescheduled for three reasons:
channel is sensed busy: some other nodes are already negotiating on the common control channel; collision occurs: two or more nodes try to access the common control channel simultaneously; all data channels are occupied: even though the common control channel would be free, data transmissions may occupy all channels.
G-McMAC uses binary exponential backoff (BEB) to schedule retransmissions randomly. By denoting the ith backoff delay as uniformly distributed random variable

If the first transmission attempt of a packet is successful, there is only an initial transmission delay

We model the impact of multichannel communications using a Markov chain. The number of available channels is taken into account by calculating the probability that all channels are occupied, which can be found using Erlang B formula [19]

We can calculate the joint distribution of R and K by using the probability of successful transmission




Next, the expected delay conditioned on


3.2. Derivation of Variance
Next, we will deduce the closed-form equation for the variance of delay in case of G-McMAC. For that, we first need to calculate the square of (9), which is

Moreover, in order to calculate the variance of delay we need to calculate the square of expected access delay, that is, the square of (10), which is

Finally, now we can calculate the variance of delay as follows:
From (10) and (14), we can see that the condition for finite expected delay and variance is that
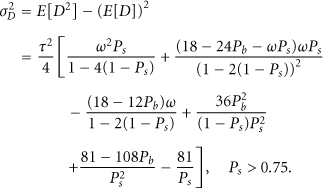
Verification of theoretical results (
3.3. CDF of Delay
Even though we now know the average access delay and delay variance of G-McMAC, the distribution of delay is still unknown. However, it is possible to find out an accurate approximation for the CDF of the delay by using the probability of successful transmission which describes the delay distribution uniquely. Hence, we simulated the delay of G-McMAC, and Figure 5 shows the CDFs of delay for different arrival rates. As we can see from the figure, the CDF of delay can be approximated in pieces.
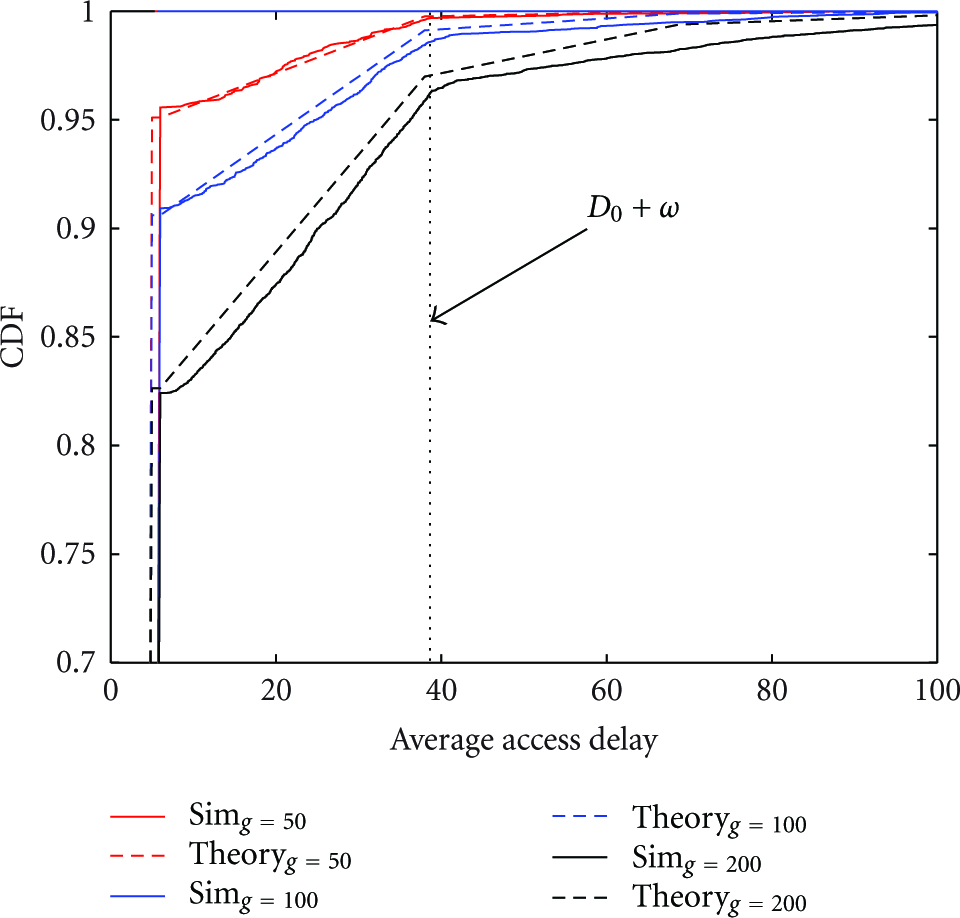
CDF of the delay of G-McMAC (
From the figure, it is noted that the CDF of delay has three angle points and the CDF of delay grows linearly between those points. First of all, if the first transmission attempt of a packet is successful, access delay will be
By continuing this reasoning, the probability that the delay of a packet is D can be formulated as follows:


Figure 5 shows the results of approximation together with the simulated results. As we can see from the figure, this approximation follows closely the simulation results. The difference between simulated and theoretical curves is negligible and thus, from these results we infer that the approximation is accurate.
3.4. Delay and Stability Analysis
It is of significant importance to understand the operation of the underlying communication network to ensure proper functioning of the entire wireless automation system. Thus, in this subsection, we analyze the performance of G-McMAC with respect to delay, delay variations and communication system stability. In general, the performance of a multichannel communication system is affected by the following three critical parameters: packet arrival rate, packet size and number of available channels. Delay and variance of delay behave similarly with respect to different communication parameters. From (10), we see that
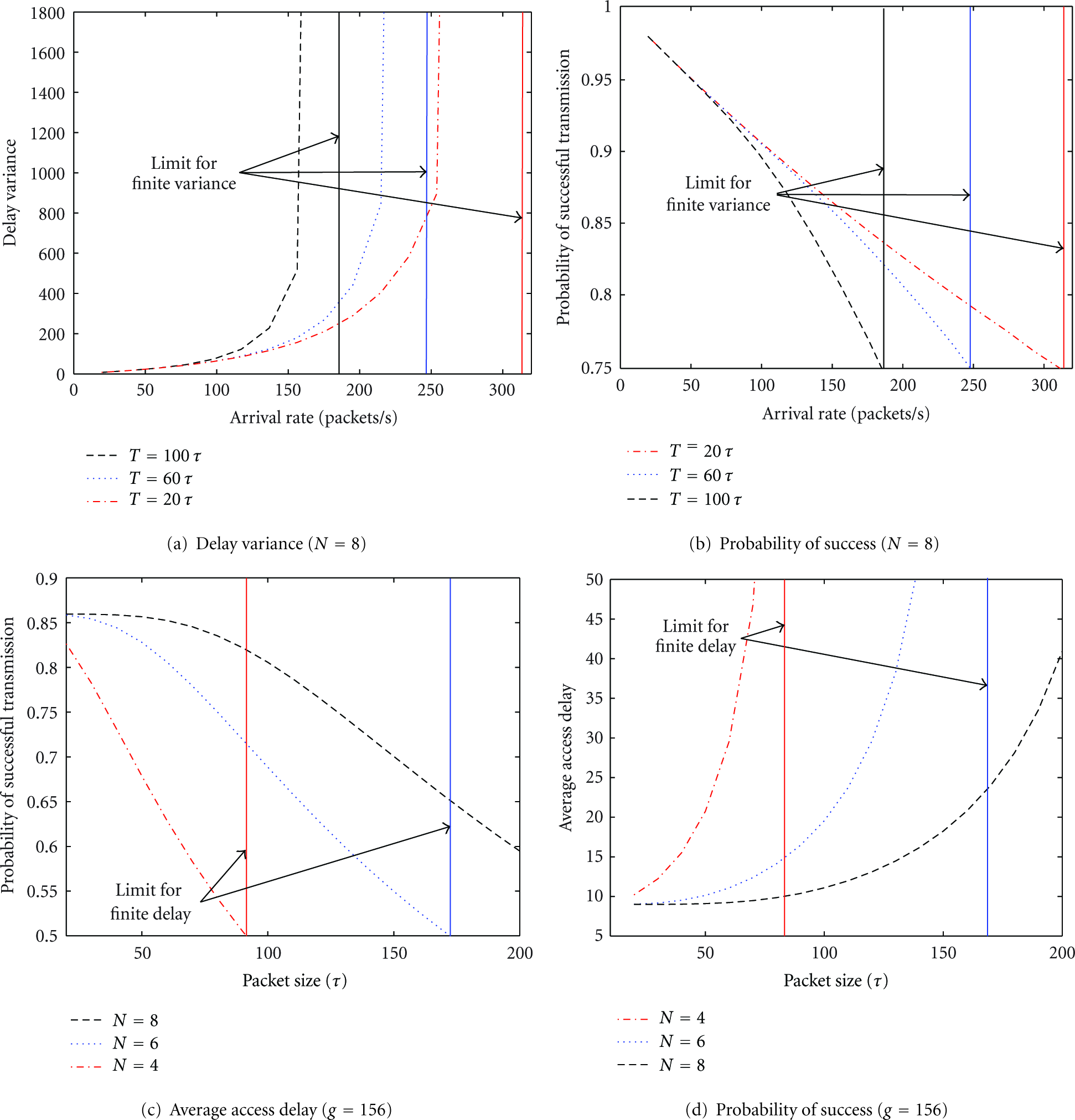
Let us first consider the impact of arrival rate on delay variance of G-McMAC. Figures 6(a) and 6(b) depict the delay performance of G-McMAC as a function of arrival rate for three different packet sizes. As we can see from Figure 6(a), variance of delay is the same for different packet sizes while the arrival rates are low. This is due to the fact that with low arrival rates, the network load is low as well. Figure 6(b) supports this observation since the probability of successful transmission is the same for different packet sizes, with low arrival rates. This means that the network is not congested since the probability of collision and that the channel is sensed busy are both low.
Stability and performance of G-McMAC.
Moreover, it is evident from Figure 6(b) that at some point the probability of successful transmission will start to decrease if the arrival rate is increased enough regardless of the used packet size. However, for large packets, this point comes sooner since the network will be fully occupied with smaller arrival rates. This can be seen from (4). Hence, in case of large packets the limit of finite variance,
Secondly, we investigate how the chosen packet size affects the delay performance of G-McMAC by considering average access delay. Figures 6(c) and 6(d) illustrate the average delay and probability of successful transmission of G-McMAC as a function of packet size for different number of available channels. As expected, the probability of successful transmission will be higher in case of a larger number of available channels regardless of the packet size. The figures also show the stability point of G-McMAC, which is the same as the limit for finite delay, since we must ensure that a finite average delay exists.
Stability limit of the protocol depends on the number of available channels such that the average delay approaches infinity sooner if only a small number of channels is available. Moreover, we can also see that the impact of packet size on the performance of G-McMAC will be smaller in case of large number of available channels since the increase in delay is slower and decrease in probability of successful transmission is more rapid, respectively.
From the presented results, we infer that it is essential to understand the delay performance of the used multichannel MAC protocol for different parameter values to ensure system stability. Moreover, these results can be exploited to study the impact of multichannel communications on different wireless applications. Hence, the given results are important also in system design. We will next demonstrate the importance of delay performance analysis by considering a practical application scenario. More specifically, we investigate the impact of multichannel communications on wireless control.
4. Controller Tuning in Wireless Automation
Especially in real-time control systems, large delays and delay variations may have catastrophic consequences by inflicting instability in the control system. To implement a wireless control system (WCS), these issues need to be taken into account. Hence, in this section, we present tuning rules, including some tuning constraints, for various controllers that can be used in WCSs. In the next section, we study the performance impact of the network on the control loop.
4.1. PID Controller Tuning for WCS
When designing controllers for a WCS case, the network performance needs to be taken into account. The main constraint coming from the network is the induced delay and delay variation, called jitter. The impact on the performance of the controller can be studied by considering robustness of the control system. Since a controller designed for the maximum delay does not ensure stability of the closed-loop system in case of varying delay [20], delay variations should be taken into account in controller design. This can be done by exploiting the jitter margin, which defines the upper bound of the varying delay
We consider a first-order lag plus integrator plus delay (FOLIPD) model [21] with a proportional-integral-derivative (PID) controller. The process could either include the low-pass filter (integrator + first-order lag), or a measurement filter could be added to an integrating process as well. The system is presented in Figure 7. The process transfer function is


The control system model.
We use the continuous-time PID controller as an example controller and denote proportional, integral, and derivative gains by k,

One stability criterion suitable for time-varying delay systems is the jitter margin. The jitter margin theorem of Kao and Lincoln [6] defines upper bound for the delay jitter


We consider here two tuning approaches: one based on the internal model control (IMC) principle and another based on a tuning rule. In both cases, we include constraints on the controller parameter to ensure stability of the control loop with varying network delay through the jitter margin theorem. Other process models and tuning rules taking into account the jitter margin can naturally also be considered in a similar way.
In the context of this paper, we are interested to study the impact of the used communication system on the performance of the control system. In practice, this means to relate the network parameters that result in some delay jitter, which then determine the control loop performance. That is, the network delay jitter requires the control loop to be robust to that jitter. In the following, some tuning methods that take the delay jitter into account are considered and simulations of controller performance are given in Section 5.
To measure the performance of the controller, we use in this case the integral square error (ISE) cost function, which is defined as

4.1.1. Tuning by Rules and Constraint
Many tuning rules for the FOLIPD process are in the following form [21]:

In [23], the approximation of the relationship between the tuning parameter and jitter margin

4.1.2. Tuning by Internal Model Control
If an exact process model is known, it is possible to find out the perfect controller for that specific process by exploiting internal model control (IMC) approach. In the IMC method, a model of the process is used within the controller, which is of the form

To make the IMC controller realizable, the process model is divided into invertible and noninvertible parts such that



To improve robustness against noise and make the controller proper, we use a first-order low-pass filter with time constant λ (λ-tuning). Now, the IMC controller for this process is


Furthermore, when we apply the controller to the plant, the closed-loop system becomes

4.2. Theoretical Performance Calculations
Now we calculate the theoretical performance in terms of the ISE criterion (21) for the IMC-based controller tuning. For an unit step input as a reference signal, we can formulate the closed-loop response in Laplace domain as






Now by combining (34) and (36) we can see that the performance criterion in this case is given by

4.3. Delay Jitter Considerations
Here some practical considerations related to the delay, delay jitter, and network are discussed. If the value of delay plus jitter margin is fixed with an upper bound for the total delay

If we choose a very small delay (the minimum communication delay) and large jitter margin, the controller will be very slow, due to having to be excessively robust for delay jitter. On the other hand, if we choose a large delay and small jitter margin, we have to buffer all packets that arrive before this large delay bound, to ensure stability, which is not good either. Hence, from the controller point of view, there exists an optimal selection for the delay and jitter margin, which is in between these two extreme cases. This case is demonstrated in the simulations of the next section.
Since in our case the maximum delay of a packet is not bounded in practice due to the random contention process of the network protocol, it is not possible to give an absolute value for the total delay


For safety considerations, the delay jitter margins we use in the tuning rules (23) and (36) are twice the actual calculated jitter of the network. The jitter margin used for tuning is thus

5. Multichannel Communications and Wireless Automation
In this section, we analyze the impact of multichannel communications and different communication and automation parameters on the performance of a wireless control system.
5.1. Critical Communication Parameters
First, we study how the critical communication parameters should be chosen if the target performance of the control system is determined beforehand. We set the probability that the delay is less than the jitter margin as
We investigate the performance of the communication system for running an application, using the derived theoretical results. Figure 8 illustrates the impact of different communication parameters on the possible arrival rate. Naturally, we can see the general expected behaviour such that the maximum arrival rate grows as the number of available channels is increased or the packet size is decreased. We can also see that there exists a tradeoff between different parameters. Using this surface, it is possible to map different parameters. For example, if we want to use an arrival rate of 220 packets/sec, we can use different number of available channels and packet sizes to achieve that, see blue area in the figure. Results also demonstrate the fact that at some point additional data channels do not give notable benefit since the performance of G-McMAC is bounded due to the contention process on the CCC.
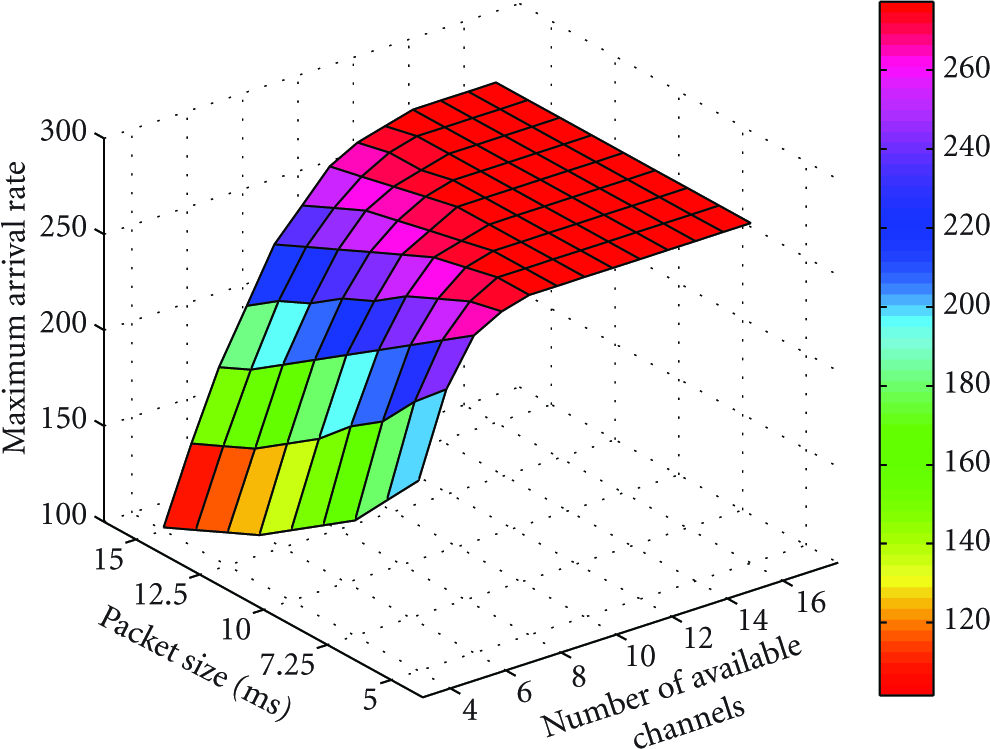
Maximum arrival rate for maximum delay.
5.2. Impact of Network on Control Tuning
In order to understand the relationships between communication and control parameters, we study the impact of multichannel communications on the required jitter margin and tuning of the control system. Number of channels is set as
Thus, in this case, the used communication parameters determine the delay, which then determines the value of the jitter margin. The impact of communication parameters on the jitter margin is shown in Figure 9, where the jitter margin is plotted as a function of arrival rate and packet size. Naturally, with small packets and low arrival rates, the delay jitter is small. However, when the arrival rate or packet size is increased, the delay jitter increases, which requires a larger jitter margin of the control loop to remain stable. As we can see, the communication system restricts the design of the controller because of the induced delay. On the other hand, larger jitter margins enable higher arrival rates compared to Figure 8.

Impact of communication parameters on the jitter margin.
Figure 10 shows the impact of communication system performance on the tuning parameter a. The case with IMC tuning behaves similarly as in Figure 9, since

Controller a-tuning gain as function of communication parameters.
5.3. Control
For simulations, we select the process parameters
Results for the ideal closed-loop transfer function (37) and the case when the delay is approximated by the first-order Taylor series (29) resulting in a implementable controller of the form


ISE cost criterion function with respect to the packet size and arrival rate. (a) Ideal IMC, (b) implementable IMC controller.
The results imply that the actual costs of the IMC controller are higher compared to the ideal IMC controller, due to the approximation. From the figures, we can see that the impact of arrival rate on the performance is more significant than the impact of packet size, since with low arrival rates the chosen packet size does not affect the performance. When the arrival rate is increased, the selection of packet size becomes more important. Nevertheless, the performance criterion increases faster as a function of the arrival rate than packet size in general.
When the IMC controller is further approximated to the form of a PID controller (so-called IMC-PID λ-tuning), the controller becomes [21]


ISE cost criterion function with respect to the packet size and arrival rate for PID a-tuning and PID-IMC λ-tuning.
Thus, we conclude that the overall performance of a wireless control application depends strongly on both aspects of the system, wireless communication, and control parameters. Moreover, by adjusting the parameters on both sides of the system, it is possible to find a middle ground where the performance is acceptable.
6. Conclusions
Since exploitation of multichannel systems enhance the performance of a wireless network significantly, we have studied the impact of multichannel communications on wireless automation in this paper. Our analysis focused on delay since it is of significant importance to understand the delay properties of the used communication protocols, which directly affect the design and operation of wireless automation systems. We analyzed the relationship between the critical communication and control parameters by using the FOLIPD process model together with several PID and IMC controllers. We give control design guidelines for controller tuning based on the network parameters, such as the packet size and traffic rates. These results demonstrate the trade-off between the chosen communication and control parameters as well as gives tools to assess the possible control performance given the network design. Our results show that it is important to study both parts of the wireless automation system together in order to design a feasible and working system.