
Abstract
Aimed at the defects of current coverage-enhancing algorithms, firstly the probability model is introduced into the coverage-enhancing algorithm of the directional sensor network based on the virtual potential field, and the probability model would have an impact on the location of the centroid. Secondly, to the boundary coverage, through the simulation of typical algorithms which consider the boundary repulsion, it finds that the coverage rates of the corners are much lower than the overall coverage. To add a vertex force on the corner is essential and to some extent would reduce the gap between them. Finally, based on the random deployment of sensor nodes, a novel algorithm is proposed which determines whether the sensor node rotates or moves along fixed direction according to the coverage effect, named as PRMCA (probability model based rotate or move along fixed direction coverage-enhancing algorithm). A set of simulation experiments verify the performance of the proposed algorithm.
1. Introduction
At present, coverage, which is regarded as monitor of service quality, has been an essential problem of the wireless sensor networks (WSNs) [1]. One of these research directions is to use less quantity of sensor nodes or shorter time to achieve the same effect under the premise of ensuring a certain quality of coverage by some algorithm strategies. As the nodes' deployment reflects the cost and performance of WSN [2, 3], the covering control algorithms can greatly reduce the number of nodes, can also prolong the active time, and naturally can reduce the energy consumption of WSNs [4]. In the WSN coverage research, these aspects need to be considered, including the nodes' deployment, the nodes' sensing and communication range, energy efficiency, the algorithm characteristics, and sensor mobility. In different application fields [5, 6], researchers have proposed a lot of coverage mechanisms.
In the traditional research of utilizing the virtual potential field to optimize the quality of WSNs, while calculating the virtual force, some algorithms simply calculate the composition of the force based on the Boolean model so that they ignore the unique attribute of the probability model. For example, Li et al. in [7] proposed the virtual force algorithm (VFA). Tao and Ma in [8] proposed the target involved virtual force algorithm (TIVFA). Tao et al. in [9] proposed the PFCEA for the direction model (potential field based coverage-enhancing algorithm, PFCEA), and so forth. The authors in [10] proposed a coverage configuration algorithm based on the probability detection model (CCAP). The authors in [11] proposed a coverage preservation protocol based on the probability detection model (CPP) that makes working nodes in sensor networks as few as possible when network coverage is guaranteed. However, this protocol configures a network using centred control algorithm which limits the network scale, and at present most of the literatures have not introduced this probability coverage model into three-dimensional sensor networks. In fact, most practical applied wireless sensor networks are deposited in three-dimensional sensor networks so that it will be more accurate if it is simulated in a three-dimensional space [12, 13]. In [12], Bai et al. proposed and designed a series of connected coverage models in three-dimensional wireless sensor networks with low connectivity and full coverage. In [13], Nazrul Alam and Haas studied a truncated octahedron deployment strategy to monitor the network coverage situation.
In the random deployment, thedistribution modelismainlybasedonthe following threeassumptions: Poisson's distribution, normal distribution, and random distribution using software simulation [14–17]. In actual deployment, especiallyfortheharsh environment, sensor nodesare usually laidby theairsheddingmanner [18]. However, it is inevitable to bring about nodesthat arenot uniformly distributedin the region. If the sensor nodes achieve the enhancement of coverage just only by adjusting the perception angle, the result will be impacted by the nodes' initial position. The maximization of the coverage cannot be really achieved. In the meantime, the free movement of the sensor nodes is not practical due to ignoring the limitation of movement direction.
According to the methods of calculating the centroid position physically and the characteristics of the probability model, the position of the node centroid based on the probability model can be figured out. The position describes the impact of the centroid on the probability model. On the basis of the above, this paper proposes an algorithm based on coverage effect to determine the sensor to rotate or move along fixed direction which is named as probability model based rotate or move along fixed direction coverage-enhancing algorithm PAMCA. This algorithm can be proved to make up some defects of current algorithms.
2. Coverage Enhancement Issues
2.1. Problem Formulation
The probability model based on the coverage-enhancing problem of directional sensing network composed of the nodes which can rotate and move along fixed direction can be described as follow: When a certain number of sensor nodes are deployed randomly in a specific region, how to calculate the composition force of the centroid in the perception region and determine the sensor to rotate or move along fixed direction according to the coverage effect.
2.2. Analysis and Definitions on the Coverage Enhancement Issue in Directional Sensor Networks
Before research, the following assumptions should be firstly made.
All nodes in WSNs are isomorphic, which means that all the nodes have the same perception radius ( The nodes work independently and have the capacity to move towards the specific target location accurately. The nodes have the sufficient energy to complete the process of movement. Each node can acquire the information of perception direction and control the direction. In a rectangular target area A, any two sensor nodes deployed randomly are not in the same location.
The relevant definitions are as follows.
Definition 1.
Probability Perceptual Model : under the premise that the node i does not have any neighbour nodes, the perception probability of i toj in the monitoring region can be described as follows:
Definition 2.
Coverage: the coverage of the WSNs W deployed in the target region A is marked as


Definition 3.
Coverage Factor: the coverage factor μ implies the impact of the network coverage when the node moves once, which is defined as follows:

3. Description and Analysis of the Direction Sensor Based on the Probability Model
Due to the reality, the probability model based on directional sensor has a wider area in application. Sensor energy will decay as the time goes, and the sensing radius will decrease; therefore, how to ensure stable time of the regional coverage will be a focus of the future research, which means to add the timeline to the four-dimensional coverage. And we should also pay attention to the value of the coverage probability of the regional point when the regional coverage is studied; the greater the probability is, the longer time the points are covered.
Based on the model and abovementioned definitions, the concept of the centroid is introduced in the probability model. It is reasonable to assume that the mass density is proportional to the size of the probability, so the different probabilities have different effects on the position of the centroid. The centroid position can be calculated by the method in physics.
It is assumed that points have the same mass density if the points have the same distance from the sensor, and the density is proportional to the perception probability, the ratio is set as k (k is a constant); therefore, in a circle that the node is regarded as the center and

Sensory domain of node i (
It is clear that the centroid position is in the symmetry axis

Simplifying further,

Obviously, when

It can be concluded that the uniform sensing region is a special case of the probability perception model. When
4. The Study of the Visual Force
When the distance between the sensor nodes is less than
Under the impact of the repulsion, the nodes spread as far as possible in order to ensure the maximum area covered. It is well known that the condition that the distance between sensor nodes is less than

The situations of overlap of sensory region in directional sensor model.
When the distance of the two nodes is less than
Reference [20] provides another judgment for the existence of perception overlapping area: while the perception model is simplified as a triangle, according to the condition of whether the two triangles have intersecting edge, the existence of the overlapping area can be judged. The method is called the straddle experiment. As is shown in Figure 3, there must be at least an intersecting edge for the two triangles with the overlapping regions; in Figure 3,



Two sensor models with overlapping sensory region.
If the relationship between the nodes meet conditions in (8) and (9), there will exist repulsion between nodes, and it will be defined as
In the random deployment, it is not easy to realize that the nodes are distributed uniformly. The randomness of the nodes' position is great, so it is possible that many points are centralized. In the calculation of the virtual joint force, the boundary problem should be taken into account, which is not considered in most of the papers, or just one boundary direction, as shown in Figure 4.

The corner in the sensory region.
In the simulation of the proposed algorithm in this paper, it takes four same squares in the corner, whose area is 1/9 of the total area but other algorithms only consider the repulsion nearest to boundary nodes. The number of adjustment is set 100.
As is shown in the simulation experiment results of the Table 1, it is not enough to only consider the repulsion within a certain distance to the node D in the corner. The attraction of the uncovered vertex B should also be taken into consideration, namely, the attraction of the vertex to the sensor.
Coverage and border coverage.

This paper assumes that the force of the nearest boundary points and four vertexes of the rectangular frame to the sensor node exist. Obviously, in the region that needs to be covered, the force of all directions should be considered simultaneously if all the vertexes are in the communication range of the sensor node.
As is shown in Figure 4, C is the centroid point, D is a boundary point within a certain distance to sensor node, and B is a border vertex; in this case the force of D and B on C must be considered.
The definition of the boundary force is as follow:

To sum up, the resultant force of the sensor centroid i can be expressed as

5. Descriptions of Node Movements
Now, in most papers, when considering the forces of the virtual potential field to nodes, the researchers only consider the rotation or the omnidirectional movement of the nodes, while the omnidirectional movement is unpractical and the rotation of the node costs too much energy when dispersing without a high speed. For instance, when considering the rotation merely, only when the force has a tangential component, the node can rotate along this direction. As Figure 5(a) shows, though there is an overlapping region, it has no forces in the tangential direction. Therefore, the node can't rotate; even if it rotates, it also needs to rotate for more times to make the overlapping region disappear. As Figure 5(b) shows, when considering the movement merely, it only needs to rotate for a small angle to make the overlapping region disappear. But in this condition, the movement will certainly cause the unnecessary energy cost. Hence, a method can be introduced that movement and rotation are considered synthetically to avoid consumption of the node's energy.

Two special situations in the WSNs.
In the movement procedure of nodes, their moving directions are not arbitrary. Such as cameras, they can only move forward and backward by focusing or modulate the viewpoint by rotating. In conclusion, most moving directions of sensor nodes are limited. Therefore, this paper assumes that the node only rotates or moves along with the sensor's direction.
In physics, acceleration has been defined. It is a vector that measures the speed changing in unit time. It reflects the moving trend of the object. This conception can be applied in coverage researches. According to the analysis above, a criterion must be introduced to measure the moving change of objects. We can use the coverage improvement (influence factors of coverage) as a measurement and call it acceleration.
Objects' movement can be judged by the influence factors of coverage. We consider that the influence factors of coverage (acceleration) in this direction are bigger than the other direction; the node will move towards this direction. Otherwise, the node will move towards the other direction. In particular, we define that if the accelerations in two directions are equal, the sensor will rotate. It shows as Figure 1.
That, the node can only move along with the center line (

When (14) was founded, the angle between resultant force
6. Algorithm Description
A coverage-enhancing algorithm is introduced as follows according to the virtual forces to nodes. This algorithm is a distributed one, which runs simultaneously in each sensor. Taking node i for example, its formal description is shown as in Algorithm 1.
//initialization (1) (3) Set the max cycle-index While ( { (4) Renew the neighbor nodes set of node i; (5) Read the current coordinate position of node i; (6) Read all neighbor nodes of node i; (7) Calculate resultant force to node i according to formulas (8) Calculate the target position of node i at time (9) Calculate the coverage rate of this movement and rotation according to formula (2); (10) Determine the mode of movement according to the coverage rate. Calculate influence factors μ. And determine the final moving direction of the node. (11) If in step (10), or keep the current position of node unchanged. (12) } (13) End.
Algorithm 1
7. Algorithm Simulations and Performance Analysis
This simulation experiment uses VS2010 to develop and realize a probability model based coverage-enhancing algorithm for WSN of nodes' adjustable movement pattern
7.1. Experiment Parameters' Setting
In the simulation, it sets a 300 m * 300 m sized square target region. Some nodes are distributed in this region randomly. Repulsion coefficient among nodes is defined as
7.2. Algorithm Convergence Analysis
To discuss the convergence of PRMCA, some experiments are carried out using four kinds of different network nodes' number. We produce ten scenarios randomly in terms with different topological constructs and network nodes' number, meanwhile calculating the average value of the algorithm's convergence. Experiment data are showed in Table 2. Other experiment parameters are defined, respectively, as
Experiment data convergence analysis.

Obviously, it can be concluded as follows: the convergence of PRMCA (regulating times) will not have an obvious change as the increase of the number of sensor nodes. The range of variation is usually between 20 to 30. Therefore, PRMCA proposed in this paper has a satisfactory convergence. It can accomplish the coverage-enhancing process in a short limited time.
7.3. Case Study
In this section, PRMCA will be analyzed through cases:
Forthe example above, when
In Figure 7, nodes tend to uniformly distributve gradually in the influence of the virtual force. The proposed algorithm can achieve the enhancement by the adjustment which can eliminate the overlapping and the blind regions. After 30-step adjustments, the coverage rate increases from 62.375% to 78.496% with the enhancement of 16.121%.
Figure 6 shows that due to the influence of the coverage factor, the coverage rate is constantly improving. When it reaches around 15 times, coverage rate tends to be stable, the effect on the coverage rate enhancement is not quite remarkable. The movement of the node would make energy consumption, so it will save energy without moving any longer.

Convergent Curve with different N.

Coverage optimization under PRMCA.
7.4. Simulation Analysis
The node in each movement must choose the path containing the maximum coverage rate, because the algorithm proposed in this paper is based on the acceleration which determines the movement mode, [9] for the two-dimensional space of the wireless sensor network provides an enhancing algorithm PFCEA based on the virtual force. It introduces the coverage factor into the algorithm and names the improved algorithm as PFCCEA. By comparison, as Figure 8 shows, PRMCA converges much faster than PFCCEA. In addition, node in PFCCEA needs to be randomly and uniformly distributed, so PRMCA obtains better performance than PFCCEA. But at the same time, the initial location of the node based on PFCCEA has the greater impact.
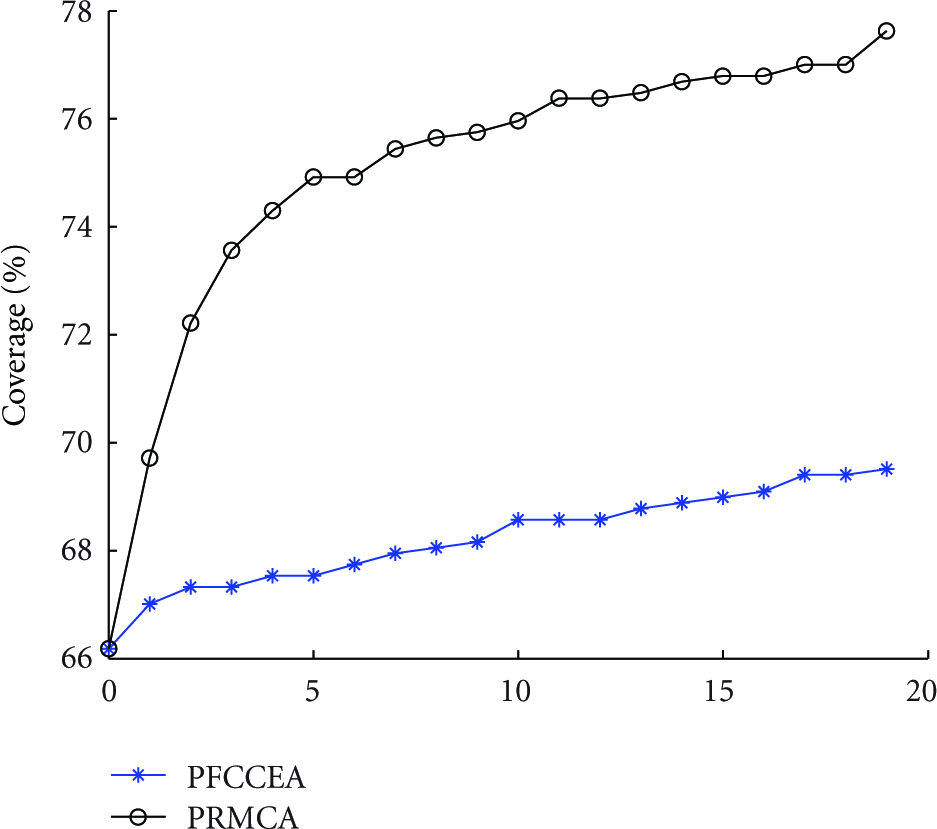
Comparison with PFCCEA.
This section is also to see the influence by changing the parameters of the proposed algorithm, which includes the number of nodes N, perception angle α, and sensing radius

Effect on different condition.
From the curve of Figure 9, it can be seen that when N and
Obviously, from Figures 9(b) and 9(c), it can be seen that the sensing radius
In addition, through the comparison, parameters such as nodes scale, sensing radius, and sensing angle have similar effect on the performances of PFCCEA and PRMCA. However, due to the limitations of PFCCEA that PFCCEA does not consider the boundary effects and PFCCEA requires uniform deployment of the nodes, it is bound to be limited by the initial coverage. At the same time, it will limit the improvement in the network coverage performance. By contrast, PRMCA is dominant.
7.5. Analysis on the Boundary
As shown in Figure 10, through the introduction of the force in corner and vertices, to a certain extent, the algorithm can reduce the gap between the overall coverage and boundary coverage. Owing to omitting the local effect of the nodes, the boundary coverage is lower than the overall coverage.
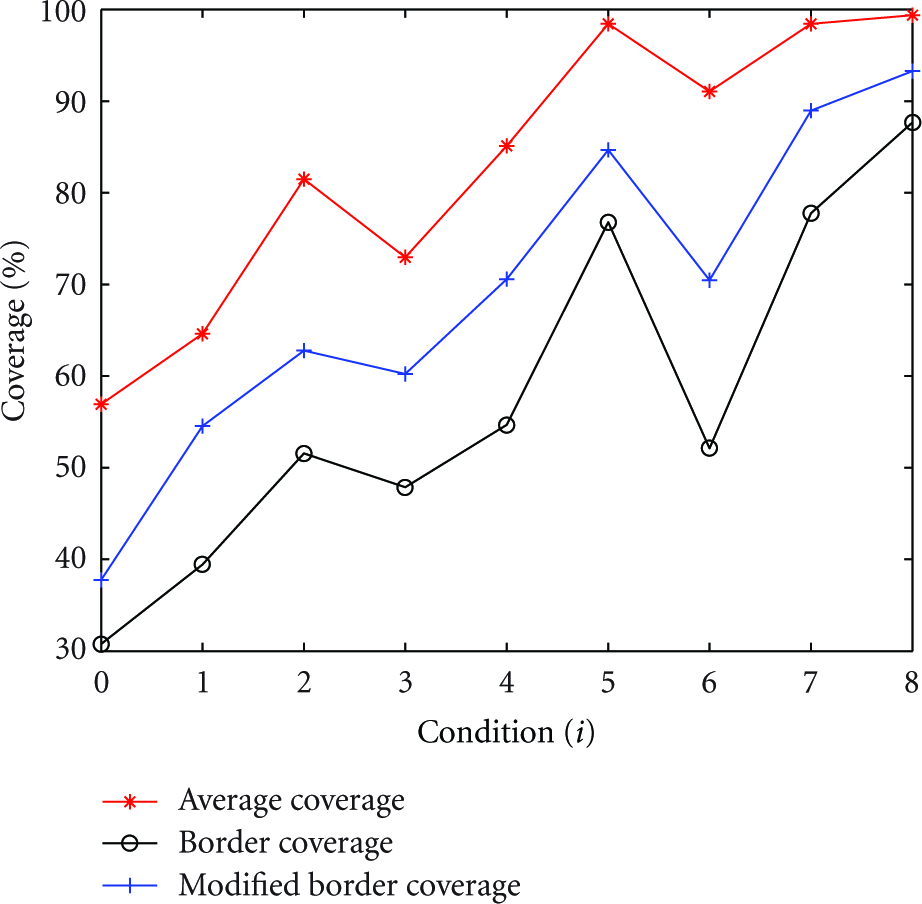
Boundary effect on different conditions.
8. Conclusions
In this paper, the probability model based on virtual potential field is introduced into the coverage-enhancing algorithm, whose probability is reflected by the position of “centroid” and transforms the sensor network coverage enhancement problem into a problem that the center of mass gradually spreads by the virtual force, and the blind region and the overlap zone are eliminated.
It is difficult for the nodes to achieve the uniform distribution in the actual application, especially in the dangerous area. At the same time, the moving direction of the node was restricted, such as camera. In this way, the initial node will ultimately affect the entire regional coverage. The proposed PRMCA can let the nodes select a movement form according to the “acceleration,” which can let the node achieve the convergence faster and save the energy of nodes.
Because the algorithm is an optimal algorithm, so the experimental data can be seen that the corner coverage must be smaller than the overall coverage. By considering the gravity in boundary vertices, it improves the corner coverage, but it is still lower than the overall coverage.
Finally, through a series of simulation experiments, it verifies the convergence and effectiveness of PRMCA, and describes several important parameters of PRMCA that influence performance. In this paper, it effectively improves the WSNs coverage rate, but when one point is covered by many sensors, the integrated calculation of this point is not considered, and it would be taken into account in the further research in the four-dimensional space.
Footnotes
Acknowledgments
The subject is sponsored by the National Natural Science Foundation of China (nos. 61171053, 61003039), Scientific & Technological Support Project (Industry) of Jiangsu Province (no. BE2012183), Natural Science Key Fund for Colleges and Universities in Jiangsu Province (11KJA520001, 12KJA520002), Science & Technology Innovation Fund for higher education institutions of Jiangsu Province (CXZZ11-0409), Doctoral Fund of Ministry of Education of China (20113223110002).