
Abstract
Fault severity estimation is an important part of a condition-based maintenance system, which can monitor the performance of an operation machine and enhance its level of safety. In this paper, a novel method based on statistical property and residual signals is developed for estimating the fault severity of rotating machinery. The fast Fourier transformation (FFT) is applied to extract the so-called multifrequency-band energy (MFBE) from the vibration signals of rotating machinery with different fault severity levels in the first stage. Usually these features of the working conditions with different fault sensitivities are different. Therefore a sensitive features-selecting algorithm is defined to construct the feature matrix and calculate the statistic parameter (mean) in the second stage. In the last stage, the residual signals computed by the zero space vector are used to estimate the fault severity. Simulation and experimental results reveal that the proposed method based on statistics and residual signals is effective and feasible for estimating the severity of a rotating machine fault.
1. Introduction
Rotating machines are widely used in industry of which the fault diagnosis is a challenging problem and has received more and more attention. A successful condition-based maintenance consists of early fault detecting [1, 2], fault-size assessing [3, 4], and fault progression predicting [5–7]. The quick and accurate monitoring of the machine health condition and severity (size) of a fault during mechanical operation period is helpful to make a proper maintenance decision for rotating machinery.
The analysis of vibration signals is often used to diagnose faults of rotating machinery and the energy of vibration signals in frequency or time-frequency domain is the most commonly used to evaluate the severity of a fault [8]. A developed modal stiffness assessment technique using the frequency response functions of the system was applied to assess the severity of the gear tooth wear damage in [9] and there was a close agreement between the theoretical results and experimental results. Li et al. [10] adopted the bispectrum analysis to effectively extract the characteristics of the vibration signals of a marine gearbox with varying fault severities and used the artificial neural network to identify the operating states. The simulation of three types of different gear fault severities diagnosis and the experimental fault diagnosis of gear wear, gear spalling, and gear tooth broken had proven that the presented approach was feasible and effective for the feature extraction and identification of a fault with different sizes. A novel method based on cerebellar model articulation controller neural networks and vibration analysis had been defined and utilized in [11]. This method met the goal to recognize the characteristics, conditions and developing trends of an operating machinery system, and to estimate different fault severities of the system quantitatively. The envelope of vibration signal also contains abundant fault information. An approach based on K-means clustering had been proposed for diagnosing the fault severity of defective rolling element bearings with the features extracted both from the raw signal and the signal envelope in [12]. This method was divided into two steps: firstly, decide whether a bearing fault existed or not; secondly, identify which the type of the inner or outer race defects with 3 different fault diameters was. In [13], the multiscale entropy and adaptive neuro-fuzzy inference system were used to extract diagnostic information and recognize fault severity, and the experimental results showed that the approach proposed was reliably for identifying the level of fault severity. The method proposed in [14] enhanced the surveillance and diagnostic capability of spectral kurtosis with AR-based linear prediction filtering and the minimum entropy deconvolution for the fault-developing trend and fault prognostics.
Statistical analysis is another tool employed for fault diagnosis. Ma et al. [15] had studied the nonlinear dynamic and vibration characteristics of the spalling defect in spur gear pair transmission system. The spalling characteristics were estimated by statistical techniques, and the results showed that the spalling failure of gear under low velocity and small excitation can be detected effectively. Combining statistical detection and estimation techniques with a qualitative model-based fault isolation procedure, a fault detection and isolation method of abrupt faults in components of a continuous dynamic system was developed and the results implied that the detection delay decreased as the fault size increased [16]. Rafiee et al. [17] introduced a fault diagnosis method for four different types of working conditions, that is, normal, slight worn, medium worn, and broken tooth of gearbox, which was based on wavelet-based signal processing and four statistical features, that is, standard deviation, variance, kurtosis, and fourth central moment of continuous wavelet coefficients of synchronized vibration signals. These works indicate that the statistical parameters can be used for estimating the fault severity.
This paper develops a novel method to estimate fault severity for rotating machinery based on statistical property and residual signals. In this method, a new feature extraction method is introduced to acquire MFBEs from vibration signals as features and a sensitive features-selecting algorithm are proposed. This method includes three stages. Firstly, the MFBEs are calculated from the vibration signals of normal and faulty working conditions with different severities based on the FFT. Secondly, the sensitive features, the statistic parameter μ, and the zero space vectors are computed in this stage. Finally, the residual signals calculated by the zero space vectors are used to estimate the different severities of a fault. A numerical simulation and two experiments are carried out to verify the effectiveness of the proposed method.
The rest of the paper is organized as follows. Section 2 introduces a new approach to extract the features and the sensitive features are also selected in this section. The novel method of fault severity estimation for rotating machines based on statistical property and residual signals is presented in Section 3. A numerical simulation analysis and two experiments with different fault severities are used to illustrate the effectiveness of the proposed approach in Sections 4 and 5, respectively. Finally, concluding remarks are given in Section 6.
2. Feature Extraction
2.1. Defining MFBE
Spectral analysis of the vibration signals is commonly used for fault diagnosis of rotating machines and the FFT algorithm is widely applied for fault diagnosis as a signal analysis tool [18]. When a mechanical failure occurs, a series of impulses can be found in the vibration signal collected from the faulty part. Usually the amplitude and impulse distribution of the vibration signal may be different from that of a normal working condition. Therefore extracting appropriate impulse components as features is crucially important to fault diagnosis and the power spectrum of frequency is an effective feature for diagnosing faults of rotating machines [19]. Thus a new feature of the vibration signals called MFBE is extracted and which is defined as the energy nearby some sort of multiple harmonic in the frequency domain.
According to the Parseval's theorem [20], we have

where
From (1), the calculation formula of the MFBEs can be written as
where
where η is a constant.
In order to reduce the effect of the noise interference when the MFBEs of vibration signals are employed to represent the features of a rotating machine with different fault severities, a feature extraction algorithm based on the MFBE is given as follows.
Algorithm 1.
We have the following steps.
Step1. Select an η to calculate the selectable parameter N
c
by (3) and the length L of the discrete time signal
Step2. Select a random integer
Step3. Process

where l is the number of MFBEs extracted.
Set

Step4. Repeat Steps 2 and 3 for

We get

where
2.2. The Sensitive Features Selection
Although the feature extraction algorithm discussed above reduces the effect of the noise interference by using the mean of the MFBEs and the all features got from the vibration signals by Algorithm 1 may represent the characteristics of rotating machine faults, their sensitivity or correlation to the faults are different. Some reasons are: the MFBEs
Algorithm 2.
We have the following steps.
Step1. Assume that there are two types of selected working conditions which are normal and faulty working condition, respectively, we denote

where α = 1,2, β = 1,2,
Step2. From the definition of
Sort the calculated

Thus a corresponding ranked feature set is obtained according to the sensitivity of the feature to this selected fault:

Step3. Select the

We define the feature matrix of normal and faulty working conditions as follows

3. The Method of Fault Severity Estimation
After the features of the rotating machinery are extracted, the next work is to estimate the severity of a certain fault. Hong and Liang used the Lempel-Ziv complexity as the valuation criteria to estimate a bearing fault (single point) severity [8]. In this work, we use the residual signals of vibration signals to estimate the different fault severities. Firstly, the zero space vectors are generated by the statistical parameters of the feature matrix. Secondly, the residual signals are computed and the procedure of fault severity estimation is constructed.
3.1. Generating Zero Space Vector
The features of a working condition are usual more than one, which construct a feature vector and the zero space vector utilized the projection of space vector is proposed to estimate the fault severity. The zero space vector of a certain fault has a property that it is orthogonal with all the feature vectors except the feature vector of the certain fault. That is to say, all the feature vectors project to the zero space vector, and the result is nonzero only when the feature vector is got by the certain fault. Therefore we extract the special information of a certain fault and filter out other faulty information by this way. The procedure calculating the zero space vectors is explained as Algorithm 3 in detail.
Algorithm 3.
We have the following steps.
Step1. Compute

That is,

where γ = 1,2.
Step2. Usually the μ
γ
is more sensitive to the γth abnormal working conditions than that of a single feature
Set

where γ = 1,2, δ = 1,2,
Step3. Denote the left null space of

Select a vector from the left null space L γ as the zero space vector Z γ which satisfies

where γ = 1,2 and λ = 1,2.
So we can get the zero space matrix
3.2. Estimating with Residual Signals
From the analysis of the zero space vector above, the extracted special information is used to estimate the severity of a certain fault and which is defined as follows.
We set

where r
α
is called residual signal which imply the information about the severity of a certain fault; α = 1,2 and
As the residual signal r
α
is the projection information of the αth working condition on the zero space vector Z
α
. Therefore for the different severities of the selected fault, the larger the absolute value of
4. Numerical Simulation Analysis
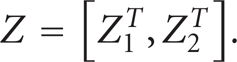
In this section, the numerical simulation analysis is carried out to verify the effectiveness of the method proposed for estimating different fault severities. For a rotating machine, rotor unbalance fault is a common fault [21]. When the rotor unbalanced fault occurs, the correspond fault characteristic parameters have larger energy at the harmonic components
where
The six simulation signals represent normal and five different severities of the rotor unbalance fault, respectively. Sampling frequency is 1 kHz. The temporal waveforms and FFT spectrums of the six simulation signals are shown in Figures 1(a)–1(f) and Figures 2(a)–2(f), respectively. Before using the proposed method to estimate the various severities of the simulation rotor unbalance fault, the features are generated by Algorithm 1 with the following parameters: l = 25, p = 6, η = 0.1,

Temporal waveforms of simulation signals (note: (a)–(f) represent the conditions of
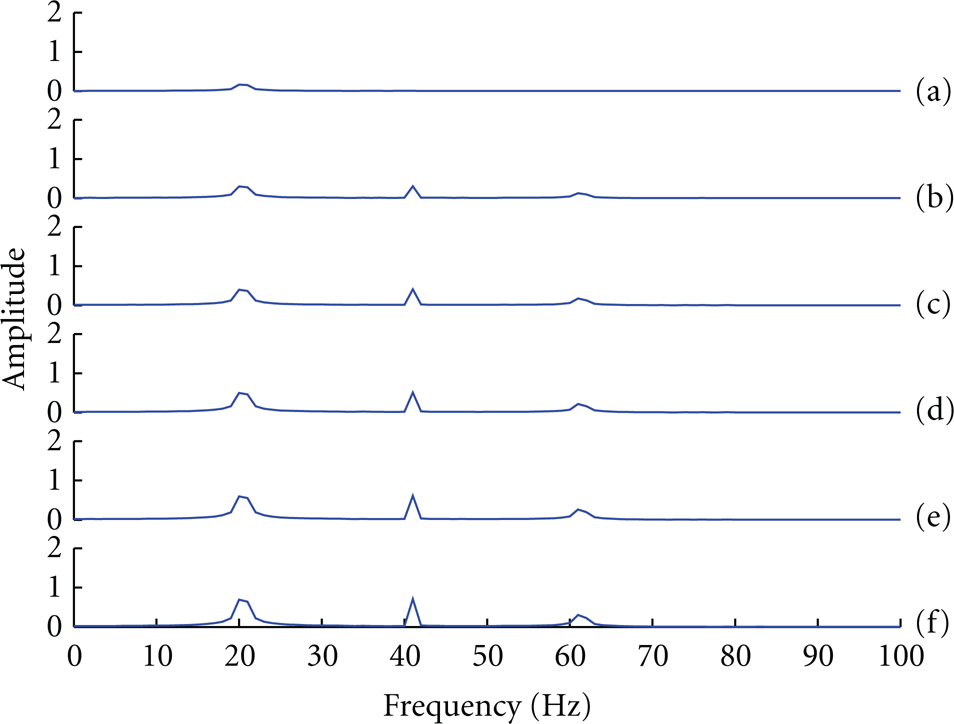
FFT spectrums of simulation signals (note: (a)–(f) represent the conditions of

The MFBEs of simulation signals (note: (a)–(f) represent the conditions of

Testing results of simulation signals.
In this figure, the sample no. 1 is the residual signal of normal working condition and the samples no. 2 to no. 6 are the residual signals of five types of the simulated rotor unbalance fault severity cases, which clearly indicate that the absolute value of the testing residual signal
5. Experimental
In this section, the experiments of rotor unbalance fault severities and bearing fault severities are carried out to test the feasibility of the proposed method.
5.1. Experiment 1: Estimate the Severity of the Rotor Unbalance Fault
In real applications of rotating machinery, when the rotor unbalance fault occurs in different times, the severities of which may be various. In this subsection, an experiment is designed to estimate the severity of the rotor unbalance fault on the fault simulation test bench shown as in Figure 5. In this experiment, the vibration signals of the simulation test bench under the working conditions with different fault severities are gathered with a data acquisition system which includes ICP acceleration sensors at a rotating frequency of 20 Hz. The sampling frequency is 2 kHz. Six sets of working conditions with different fault severities are simulated to test and verify the performance of the proposed method in estimating the severity of the rotor unbalance fault. The six simulated working conditions are
F1: normal,
F2: rotor unbalance fault 1,
F3: rotor unbalance fault 2,
F4: rotor unbalance fault 3,
F5: rotor unbalance fault 4,
F6: rotor unbalance fault 5.
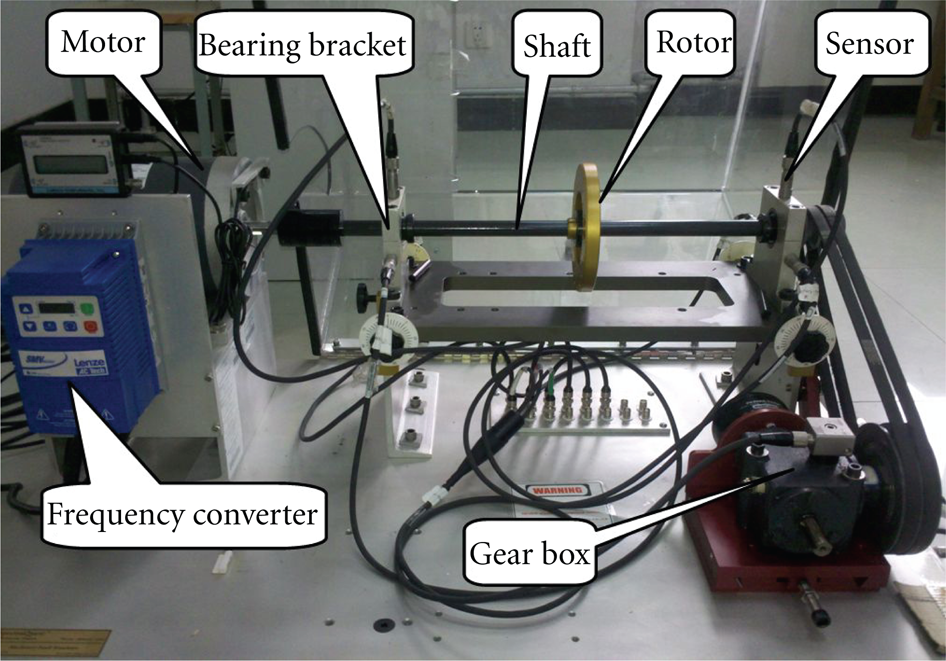
Test bench.
The working conditions F2–F6 are five types of different rotor unbalance fault severity levels which are achieved by adding screws with different mass in one of the tapped holes in the rotor disk edge, respectively. The ranked mass of the adding screws is

Various severities unbalance mass and installation position.
The original vibration signals and FFT spectrums are shown as F1–F6 in Figures 7 and 8, respectively. The features are generated by Algorithm 1 with the following parameters: l = 25, p = 6, η = 0.1,

Temporal waveforms of vibration signals.

FFT spectrums of vibration signals.
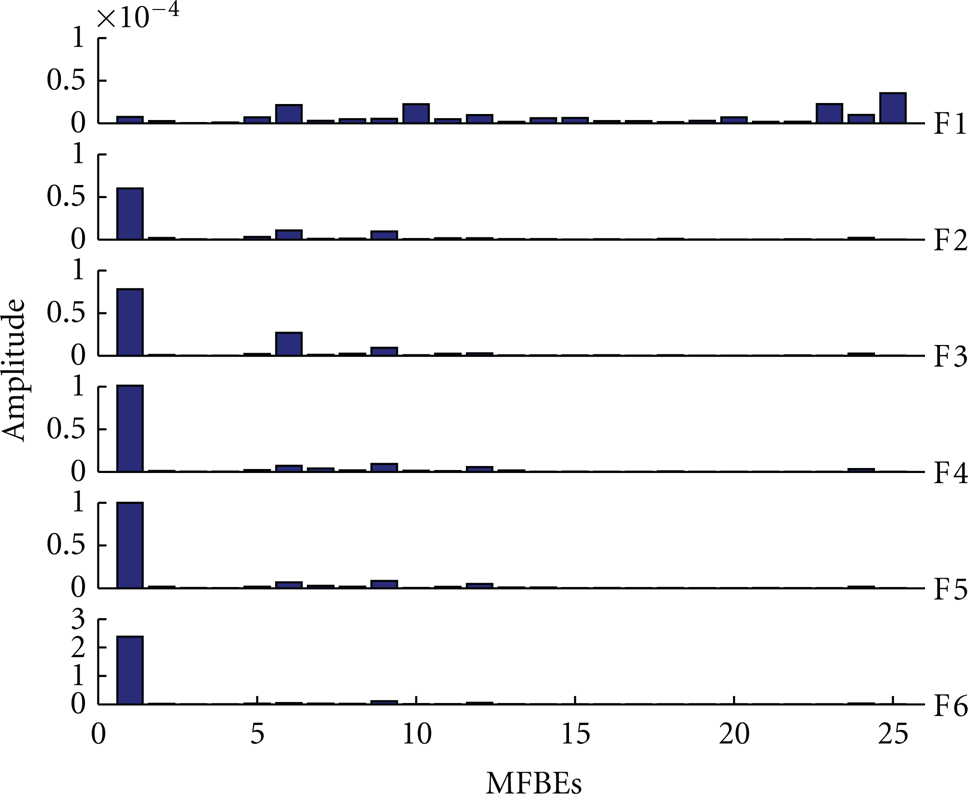
MFBEs of vibration signals.

The testing residual signals of the severities of the unbalance fault.
5.2. Experiment 2: Estimate the Severity of Bearing Faults
In order to further extend the applications, another experiment is performed to testify the performance of the proposed method about evaluating the severity of a bearing fault. The data sets of the various severities bearing faults are employed from the Case Western University [23]. Different sizes (severities) of the single point fault were introduced to a test bearing (6205-2RS JEM SKF) using electro-discharge machining. The fault specifications of the test bearings are 0.007 inches, 0.014 inches, and 0.021 inches in diameters and 0.11 inches in depth, which were manufactured artificially at the inner raceway, ball element, and outer raceway. The vibration signals are collected at 12 kHz from the bearings installed in the drive end with a motor speed of 1797 RPM. When estimating the severity of the bearing inner raceway fault, the features are generated by Algorithm 1 with the following parameters: l = 25, p = 4, η = 0.1,
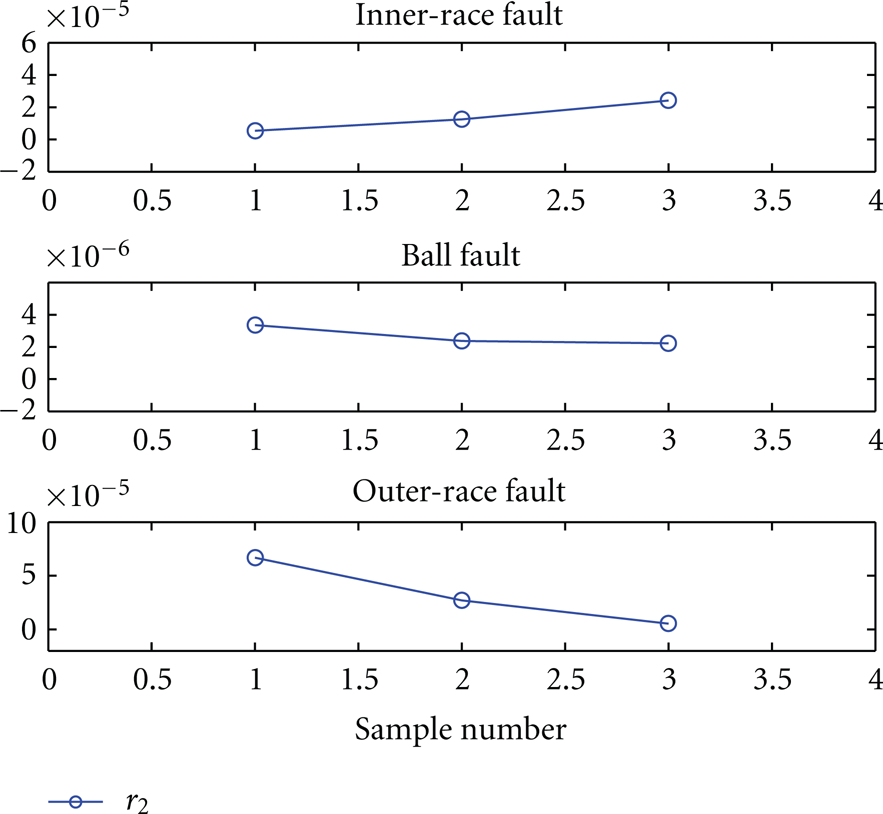
The residual signals
As shown in this figure, the residual signals increase when the inner-race fault becomes more severe. On the other hand, for the ball fault and outer-race fault, the residual signals decrease as the fault becomes more serious in severity. Therefore the increase or decrease trend of the residual signal values reflects the severity development trend of the bearing faults.
6. Conclusion
Estimating fault severity of rotating machinery is one of the key research fields of mechanical condition monitoring. In this paper, an approach based on statistics and residual signals was presented for estimating the severity of a rotating machine fault, for example, rotor unbalance fault, bearing defect at outer raceway, bearing defect at ball, and bearing defect at inner raceway. The MFBEs extracted procedure based on FFT is used to mine the features hiding in the vibration signals. In order to reduce the noise interference, the sensitive elements of the feature set were selected and statistical parameters of which are calculated to constructed the zero space vectors. The residual signals of a numerical simulation and two experiments are generated to verify the performance of the proposed method. Although the results of the numerical simulation and experiment 1 did not look alike, but the absolute values of residual signals were allincreased as the severity of the fault grew. Thus the simulation and experiments had shown that the proposed method can effectively estimate the severity of the rotor unbalance fault and bearing fault.
Footnotes
Acknowledgments
This work is supported by the Fundamental Research Funds for the Central Universities (2012LWB38), the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD) and the National Natural Science Foundation of China (51275513).