
Abstract
Previous research demonstrated that inferential sensors-based control technology can significantly improve the energy efficiency of space heating systems. However, the performance strongly relies on the accuracy and robustness of the dynamic model upon which the inferential model is built. Traditional methods, such as simplified physical model, adaptive neurofuzzy inferential sensor- (ANFIS-) based model, were developed and tested in this research. In attempt to improve both the accuracy and robustness of inferential model, this study aims to investigate how to improve the performance of inferential sensors using physical-rules-based ANFIS in prediction of the hydraulic system temperature in order to adapt the good power needed in the dwellings. This paper presents the structure of this innovative method. The performance is tested using experimental data and is compared with that of previous methods using three performance measures: RMSE, RMS, and
1. Introduction
The energy performance of a hydraulic space heating system largely depends on how the boiler is controlled [1]. The problems with the three methods commonly used in the practice of boiler control were investigated by a number of researchers [1–3]. A shared conclusion of their research is that the temperature set-point of hot water supply should be regulated according to the dynamic heating load of the building served. Dexter proposed an adaptive control scheme in 1980s [4]. Liao and Dexter proposed an inferential control scheme that can adjust the temperature set point based on the heating load that is estimated based on three operational variables, which are energy consumption, solar radiation, and outdoor temperature, easily measureable in the boiler room. These three operational variables are also introduced into the adaptive set-point heat exchanger control scheme which is proposed in district heating systems [5]. In the adaptive set-point control scheme for hydraulic space heating systems, the accuracy and robustness of temperature prediction are obviously the most essential factors.
In recent years, fuzzy logic [6] and neural networks have been proposed as alternatives to traditional statistical ones in building technology. Researchers extensively applied fuzzy logic to the control of the built environment to improve the performance and to reduce energy consumption [7–10], while neural networks are used for improving performance of the built environment [11, 12] and estimating the operative temperature in a building [13]. Based on Liao's work, Jassar et al. [14] designed an ANFIS-based inferential sensor model, which estimates the average air temperature in buildings that are heated by a hydraulic heating system. Although Jassar's ANFIS model has a low root mean square error (RMSE) in temperature estimation, the performance is strongly sensitive to the quality of the training data. This study aims to solve this problem.
Section 2 gives an overview of the ANFIS. Section 3 introduces the heat transfer process and adaptive set-point control scheme. A physical-rule-based ANFIS model is proposed in Section 4.1 and evaluated in Section 5. The discussion of application and conclusion are presented in Sections 6 and 7, respectively.
2. ANFIS Principle and Architecture
ANFIS integrates fuzzy logic with neural network such that the fuzzy system becomes more systematic and less reliant on expert knowledge. Such systems have a network structure similar to that of a neural network [16]. Details of the ANFIS architecture, rules, layers, and functions are presented in [17–19].
To present the ANFIS architecture here, we consider two fuzzy if-then rules based on a first-order Surgeon's model. These two rules are depicted in Figure 1(a);
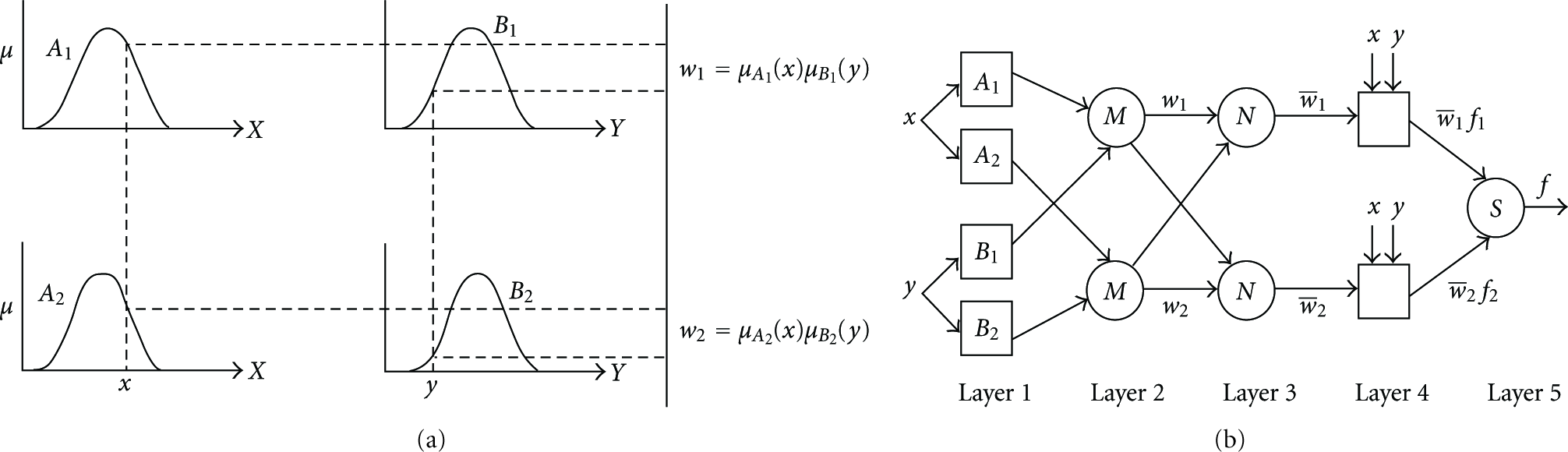
ANFIS system: (a) first-order Surgeons fuzzy model; (b) corresponding architecture for a two-rule fuzzy [15].
Rule 1: If (x is

Rule 2: If (x is




The optimal values of the consequent parameters
3. Physical-Rules-Based ANFIS Model Design
The heat is taken as synonymous to thermal energy and it can be transferred by various causes [21], such as conduction, convection, and radiation. Being easily measurable, three operational variables, including the power at which the primary energy is consumed by the system (
3.1. Heat Transfer Process and Adaptive Set-Point Exchanger Control in Laboratory
In the laboratory, there are a group of radiators different zones, which are controlled by a single room thermostat. The thermostat is installed on the middle of an internal wall at the eye level. This position was selected because the temperature here was very close to the average room temperature. Multiple sensors were used to monitor the air temperature in each zone and their algebraic average was treated as the representative measurement of the room temperature in the zone
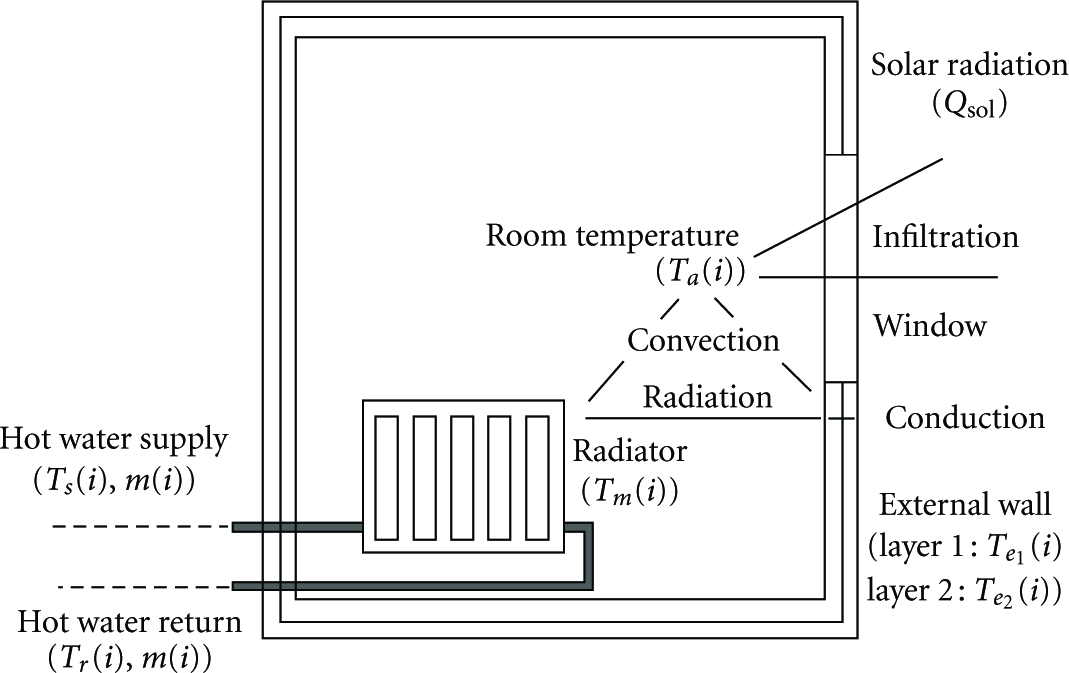
Heat transfer within one of zones in a multizone heating system [22].
Figure 3 is an adaptive set-point heat exchanger control scheme proposed in [5], the temperature set-point of the heat exchanger depends on the estimated average indoor temperature by using external temperature (

Adaptive set-point heat exchanger control scheme.
4. Structure Design
4.1. Physical-Rule-Based ANFIS Model Structure
Based on the principles of thermal dynamics and the structure of ANFIS, a new ANFIS structure is proposed. We expect to reduce the interference between the unrelated variables when tuning the parameters by changing the structure of ANFIS and integrating physical rules in ANFIS.
4.1.1. Structure
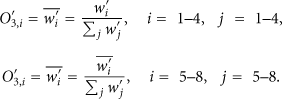
A network is proposed in Figure 4. For each input, design parameters have been used to create an initial membership function, “High” or “Low,” matrix using triangle function described by the following equations:


Physical-rules-based ANFIS structure.
The ANFIS network structure is separated into two neural rules which are “Energy In” and “Energy Out.” The inputs
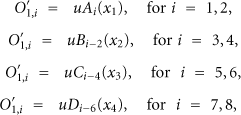
In layer 2, there are 8 nodes and every four nodes are in the same group. The output of every node is the product of the corresponding incoming signals i. The connections between the nodes in layer 1 and layer 2 represent the designed fuzzy rules between
In layer 3, the ratio of the ith rule's firing strength to the sum of all rules' firing strengths in the group of “Positive Energy” or “Negative Energy” can be presented by


In layer 5, the single node computes the overall output as the summation of all incoming signals

4.1.2. Training and Testing
In this paper, the experimental data from the laboratory heating system in an EU CRAFT project [22] is used for the training and testing of the developed model. The laboratory located in Milan, Italy, is a three story building with one zone at each floor. Multiple sensors were used to monitor the air temperature in each zone and their algebraic average was treated as the representative measurement of the room temperature in that zone. The indoor air temperature was represented by the algebraic average of the air in the building, the energy consumption Qin was calculated, and
Training and checking data set for accuracy.

Training and checking data set for robustness.

The network is trained by a hybrid learning algorithm to update the parameters [20]. The training phase is a process to determine optimum parameter values to successfully fit the training data. Each epoch consists of a forward pass and a backward pass. In the forward pass of the hybrid learning algorithm, node output goes forward until layer 4 and consequent parameters are identified by the least-square method. In the backward pass, the error signals propagate backward and premise parameters are updated by the gradient descent method. The learning algorithm for the network parameters is discussed in Section 5.
5. Performance Evaluation of Proposed Predictor
The proposed-physical-rules based ANFIS predictor is evaluated here in terms of its performance in predicting the indoor temperature and the results are compared to the ANFIS [14] and experimental measured data. To make the comparison fair, the same numbers of membership function and function type are set for each input in unphysical-rules-based ANFIS model.
Both types of prediction models are evaluated in terms of three performance measure. Root mean square error (RMSE) which measures the mean deviation (error) of the predicted values to the measured indoor temperature values. The maximum relative error (MRE) which is a measure for the largest error (or the farthest point) as well as goodness of fit (
5.1. Accuracy of the Models
3000 pairs of data in January 2001 are used to train the ANFIS and 4900 pairs of data are used for testing. From Figure 5 and Table 3, we can find that with same amount of training data, physical-rules-based ANFIS have a better performance in accuracy of prediction. Indoor air temperature can be predicted by limited data in proposed physical-rules-based ANFIS prediction model rather than ANFIS model.
RMES, MRE, and
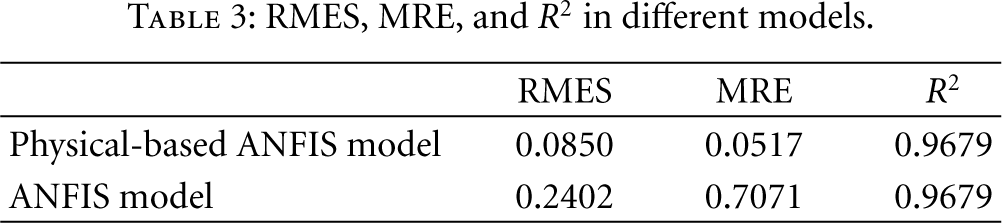

Comparison of ANFIS prediction output and physical-rule-based ANFIS prediction output.
5.2. Comparison between Physical-Based ANFIS Predictor and Unphysical-Based ANFIS Predictor
We use 7900 data pairs in January 2001 (Figure 6) for training and the data set in December 2000 which includes 7900 data pairs for day 1–day 22 to test the prediction performance. The strong agreement between measured and predicted temperature values in Figure 7 indicates that the model used in the predictor is correctly structured and can accurately be used to estimate the building air temperature.

Experimental measured data in January 2001.

Comparison of experimental output and physical-rules-based ANFI output.
Unphysical-rules-based ANFIS model [14] has a good performance in RMSE in estimating building indoor temperature; however, the robustness need to be improved when the input is not stable. There are some significant noise points around time point 4000 at the graph of

Experimental measured data in February 2001.

Comparison of experimental output and Unphysical-rules-based ANFI output in February 2001.

Comparison of experimental output and physical-rules-based ANFI output in February 2001.
The comparison conducted between physical-rules-based ANFIS and ANFIS is based on training the prediction model with data from the same building and during the same time period. For fair comparison, physical-rules-based ANFIS design parameters are optimized in terms of number of training epochs as same as ANFIS system. This approach is employed to test the robustness of the models. Six different sections of the experimental data (Jan 2000 to April 2000, December 2000, and Feberuray 2001) obtained from laboratory heating system were selected as different test data sets. The performance measures RMSE, MRE, and
RMSE in different models.

MRE in different models.


This approach is employed to test the robustness of the model. From Tables 4 and 5, we found that the RMSE and MRE for physical-rules-based ANFIS is much lower than the ANFIS system. Both the mean errors and the farthest error in physical-rules-based ANFIS have been improved comparing to ANFIS system. In Table 6, the values of
6. The Application Area of Physical-Rule-Based ANFIS Temperature Predictor
The absence of practical methods for estimating average air temperature in the built environment is filled by an inferential sensor model, based on ANFIS modeling, in conventional heating system which is controlled by open-loop control. The performance of ANFIS-based control strongly depends on the accuracy and robustness of temperature prediction. For example, in [5] the energy cost depends on the accuracy of indoor temperature prediction and also the robustness will impact of control signals to the valve. Any mistake in distributed heating system may cause energy waste and/or discomfort due to overheating or under heating. Thus, a robust indoor temperature predictor will provide more accuracy and stable control signals which avoid overshot signals to the set-point control scheme in distributed heating system. Then an adaptive set-point control scheme that the optimal set-point of supplied hot water temperature is deduced by indoor air temperature estimator can be implemented instead of traditional constant set-point control.
Figure 11 shows the adaptive set-point temperature control fulfill the indoor thermal comfort requirement. At the same time, the energy efficiency is also higher than constant set-point control. The performance of constant set-point controller is far below that of the adaptive set-point controller, the reasons for the poor performance are as follows.

Impacts of heat exchanger control.
Once commissioned, the set point is fixed for the entire test period.
If too high a value of the set point is selected, more energy will be consumed and the room temperature is more frequently above the upper level of the desired range, resulting in lower overall performance If too low a value for the set point is selected, the benefit of lower energy consumption is at the cost of significant discomfort because the room temperature is more frequently below the lower level of the desired range. Consequently the overall performance remains low.
7. Conclusion
In this paper, the physical-rules ANFIS model is proposed and its performance is compared to unphysical-rules-based ANFIS model in indoor temperature estimating. Based on the results presented, we proved that the physical-rules-based ANFIS prediction has an obvious improvement in accuracy and robustness in estimating indoor temperature in built environment, so that control signals in heating systems will be more stable and it can provide a rational basis to improve the overall performance of heating systems, especially in improving energy efficiency.