
Abstract
Target tracking is an important application of wireless sensor networks where energy conservation plays an important role. In this paper, we propose an energy-efficient sensor activation protocol based on predicted region technique, called predicted region sensor activation algorithm (PRSA). The proposed algorithm predicts the moving region of target in the next time interval instead of predicting the accurate position, by analyzing current location and velocity of the target. We take these nodes within the predicted region as waiting-activation nodes and establish activation strategy. The fewest essential number of sensor nodes within the predicted region will be activated to monitor the target. Thus, the number of nodes that was involved in tracking the target will be decreased to save energy and prolong the network's operational lifetime. The simulation results demonstrate the effectiveness of the proposed algorithm.
1. Introduction
Wireless sensor networks (WSNs) employ a large number of intelligent sensor nodes with sensing, processing, and wireless communicating capabilities to implement complicated tasks in the specified sensing field. The rapid development of microelectronic technologies, embedded microprocessors, wireless communications, and networking technologies has made wireless sensor networks of large scale applicable to a wide range of applications, such as environmental monitoring, industrial sensing and diagnosis, situational awareness on the battlefield, space exploration, and healthcare [1]. One of the most important research areas of wireless sensor networks is target tracking, in which sensors monitor and report the locations of mobile targets [2–4].
The target tracking system in wireless sensor networks usually includes three phases: (1) target detection, (2) target localization, and (3) prediction and notice [5, 6]. In the first phase the selected nodes are activated to monitor and collect the location information of the mobile target using acoustic signal or images of targets [7, 8]. Then, the cluster head locates the target using the collected information. After locating the target, the cluster head uses a prediction model to predict the next location of the target and activates the appropriate nodes to continue monitoring the target. If the prediction fails to track the target, the cluster head activates the additional sensor nodes to recapture the lost target. That implies a better prediction model can significantly reduce energy consumption, for fewer redundant sensor nodes will be activated.
Obviously, more activated sensor nodes around the target can achieve better tracking accuracy, particularly when there are some uncertainties in sensor detection. However, the activated sensor nodes need to consume energy. The more sensor nodes are activated, the more energy consumption is produced. Thus, we would like to select the fewest essential number of nodes dedicated for the task and at the same time other nodes stay in the sleeping status to save energy for prolonging the network life. High-efficiency energy strategy is a very important aspect of the target tracking protocols. How to balance the quality of the target tracking and network energy consumption has become a research focus [9–12]. In order to reduce energy consumption, we can reduce the data in communication, the frequency of communication, and the number of nodes in the tracking, by using prediction.
The cluster-based protocols are commonly used to reduce the energy usage of energy-sensitive wireless sensor networks where sensor nodes are battery powered. In cluster-based protocols, a noncluster sensor node detects the target and then it forwards the information to its cluster head. Next, the cluster head collects and propagates the information to a sink. Chen et al. [7] have proposed a dynamic clustering algorithm for distributed target tracking using acoustic information. The hierarchical sensor network system was composed of sparsely placed high-capability nodes and densely spaced low-end nodes. The high-capability nodes acted as cluster heads and the low-end nodes acted as cluster members. Cluster heads closest to the target became active with higher probability than cluster heads that were farther from the target. Similarly, the probability that a cluster member sent data to the cluster head was proportional to its distance to the target. The authors of [13] presented a continuous object detection and tracking algorithm, based on a hybrid static/dynamic clustering scheme for the monitoring of continuous objects in wireless sensor networks. However, it lacks a missing track recovery mechanism. In [14], the authors also introduced a dynamic clustering mechanism for target tracking in wireless sensor networks.
For reducing the number of nodes involved in tracking a target and saving energy, the prediction-based techniques are used to predict the upcoming location of mobile target. When a sensor node detects target, it forwards the target information to its cluster head. The information contains location, velocity, and moving direction of the target. After calculating and predicting the location of target, the cluster head wakes up all/some nodes nearby the destination or all/some nodes on and around the route of the moving target from current position to the destination. Many filtering algorithms have been used for target prediction. Lin et al. [15] proposed a Compressed Kalman Filtering algorithm to reduce the totality of transmitted data to reduce the energy consumption. Compared with the traditional Kalman algorithm, they compressed the symmetric covariance matrix into a diagonal matrix to reduce the totality of transmitted data. In [16], two distributed particle filter tracking algorithms were proposed for tracking mobile targets in cluster-based underwater sensor networks. Li [17] proposed a collaborative multisensor tracking strategy using a novel adaptive particle filtering algorithm to predict and track the target for sensor networks. However, these filters require storage of many parameters, such as location, velocity, and acceleration, so the energy consumption is very large. For the prediction strategy, due to the uncertainty and unpredictability of real-world targets' motion, it is difficult to guarantee high accuracy of the prediction. Meanwhile we cannot guarantee the target will not change its moving direction beyond the prediction. The prediction result will be poor when the target can move with large accelerations, such as animal or people.
To adapt the real-time changes in velocity and direction of a moving target, Chen et al. [18] proposed a distributed sensor activation algorithm that enabled reliable tracking with the simplest binary-detection sensors. When the sensor that detected the target would broadcast a “wake” message to neighboring sensors, the one hop neighboring sensors were activated with a probability to detect targets or sleep to save energy. However, in the dense sensor network, the energy dissipation will increase obviously. Guo et al. [9] proposed an energy-efficient algorithm by limiting the number of sensors used to track a target through monitoring their data quality and by limiting the amount of data being sent to the cluster head. The system allocated a weight to the sensor data and only sensors whose weight value was above the set threshold were allowed to participate in tracking. The weight that the sensor sent data to the cluster is proportional to its distance to the target. Meanwhile, they reduced the amount of redundant data in the network by considering the spatial relationship between neighboring sensors. Arienzo and longo [19] proposed a collaborative tracking algorithm in the cluster-based sensor networks. The algorithm adopts a greedy-type strategy to select informative sensors to track the target. In the tracking phase, the bootstrap particle filter and the unscented particle filter are used. However, the energy consumption will increase along with the accuracy of filtering prediction decreasing. In [20], the author proposed a novel target tracking algorithm to detect and monitor the path of a moving target. They activated a minimum subset of nodes while maintaining coverage and network connectivity, in order to keep more nodes in sleeping and minimize the energy consumption. However, sensor node in wireless sensor networks is not very reliable. If the sensor nodes among the minimum subset cannot work well, the tracking accuracy will decrease obviously. Also an adaptive sensor activity scheduling was proposed to detection and dynamic footprint tracking of spatial-temporal events, where concepts of Statistical Mechanics were employed to stochastically activate the sensor nodes [21].
In this paper, we propose an energy-efficient sensor activation protocol based on predicted region technique. The predicted region sensor activation algorithm (PRSA) improves the energy-quality tradeoff by predicting the moving region of target in the next time interval instead of predicting the accurate position. The PRSA algorithm can reduce the number of nodes that are involved in tracking the target and decrease the missing rate that is caused by the traditional prediction schemes. The proposed algorithm predicts the moving region in the next time interval by analyzing current location and velocity of the target. The moving region is defined as a circle around the current coordinates of the target with a radius of moving range of target in one second (assuming that the sampling interval is one second). Assume that the target's moving region in one second is less than a setting value, and then we can prove that the moving region of target in the next time interval must be in the intersection region which combines the communication range of two nodes closest to the target, as Figure 2 shows. Namely, target location in the next time interval must be in the communication intersection region. We take these nodes within the communication intersection region as waiting-activation nodes and establish activation strategy by judging the location relation between the target and the waiting-activation nodes. We activate the fewest essential number of sensor nodes within the intersection region to monitor the target, in order to ensure the target can be detected at any time and reduce the number of nodes involved in tracking the target for prolonging the network's operational lifetime.
The rest of this paper is organized as follows: in Section 2, we present the tracking system model, including target motion model and sensing model. Section 3 presents the main contribution of this paper, the adaptive sensor activation algorithm. Simulation results and detailed comparisons are presented in Section 4. Finally, concluding remarks are given in Section 5.
2. Tracking System Descriptions
2.1. Target Motion Model
We consider that there is only one target in the monitoring region and assume the target moves in a two-dimensional plane, then the target motion of the tracking system can be described as follows:


2.2. Sensing Model
When a target comes into monitoring region, the acoustic signal from the moving target is detected by the sensor nodes. At time k, the sensed acoustic energy

In our application, each measurement taking part in localization is calculated by taking the average of all samples during the localization interval to minimize the measurement error.
3. Proposed Algorithm
3.1. Problem Description
In our model (see Figure 1), we assume that the communication range of sensor nodes is
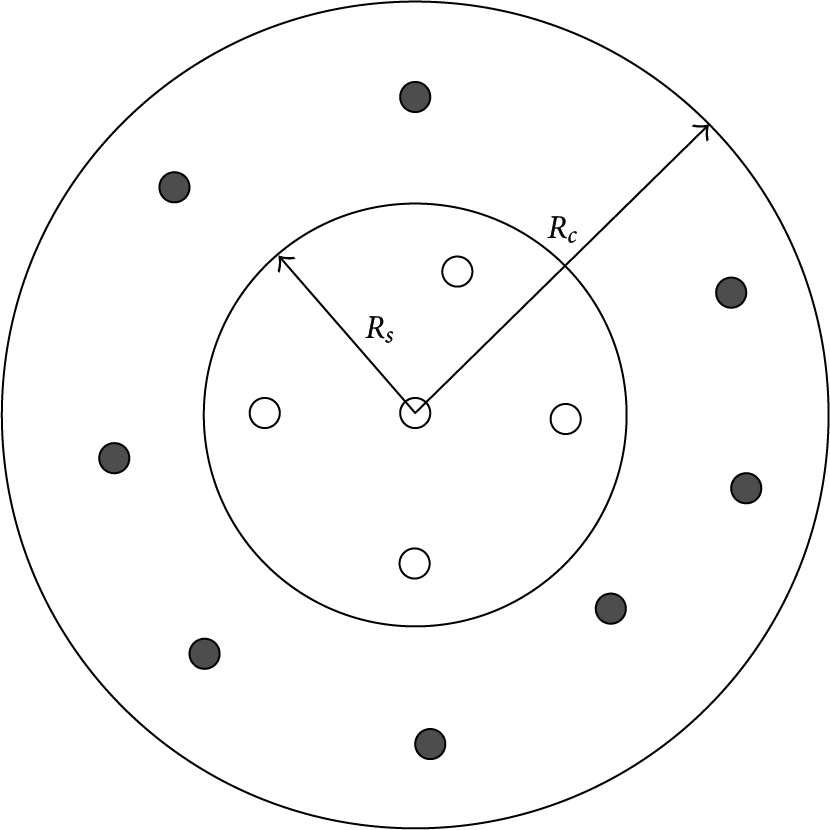
Sensing model and communication model.
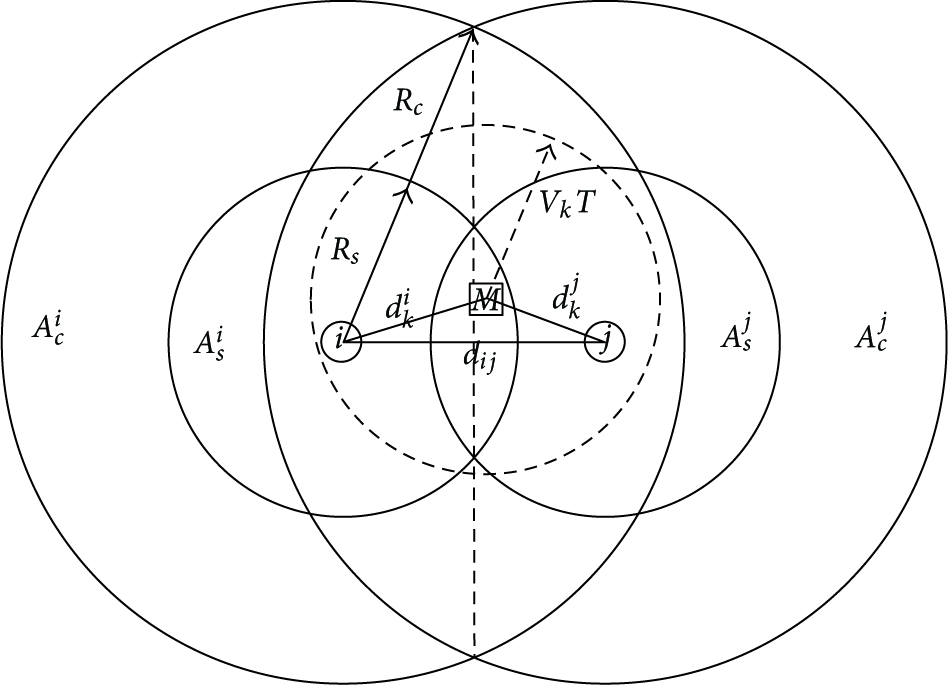
The relation between target and nodes.
For single prediction strategy, due to the uncertainty and unpredictability of real-world targets' motion, it is difficult to guarantee high accuracy of the prediction. Therefore, we predict the moving region of target in the next time interval instead of predicting the accurate position. To reduce the number of nodes that are involved in tracking the target and guarantee the target can be detected in the next time interval, we limit the target within the communication intersection region of two nodes closest to the target in the next time interval, as Figure 2 shows. In Theorem 1, as long as maximum velocity of the target is limited (satisfies
Theorem 1.
As Figure 2 shows,
Proof.
Assume that
The distance between the target and the ith node at time k is given by



According to the theorem, we can draw the conclusion that the target should be within the communication intersection region, so long as the moving region of the target satisfies
3.2. Algorithm Description
In Figure 3, the communication intersection region (short for intersection region in the following) of nodes
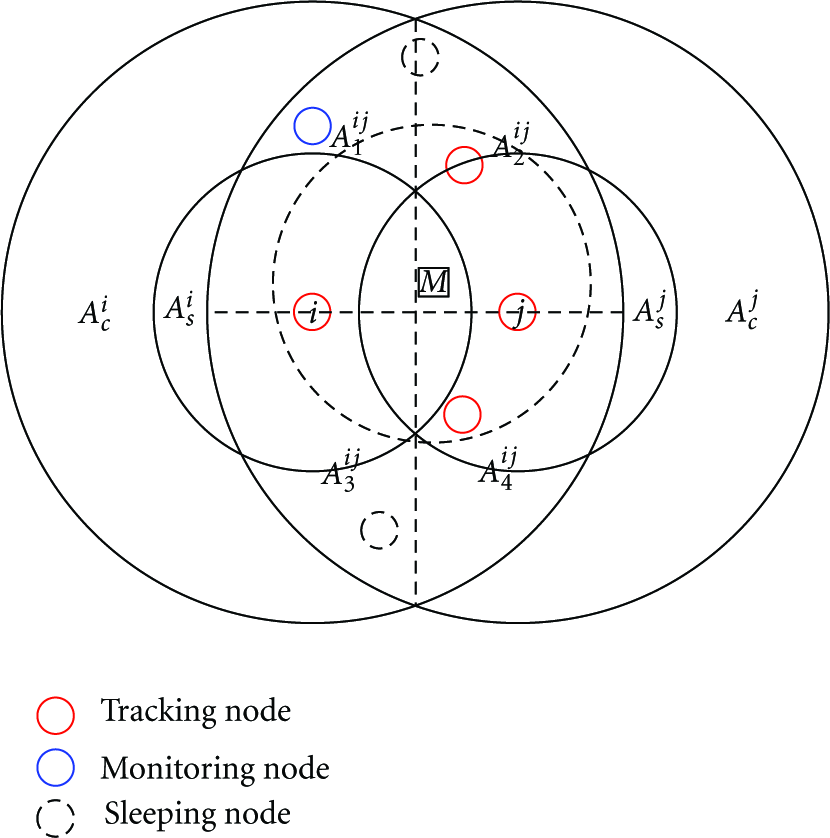
The communication intersection region.
When the target appears in the monitoring region, the nodes which monitor the target are activated. They estimate the location of the target and send the measured values to the cluster head. The cluster head selects two nodes
Calculate the number of neighbor of Active Active this node and its neighbor node with probability P; Active Active one node in Active one or two node in Similar to the target in Active node in Active Active one node in Similar to the target in
In order to facilitate implementing the activation algorithm, we treat the tracking nodes in the intersection region as “sleeping nodes” except the two closest nodes. However, we activate the “sleeping nodes” priority. The real sleeping nodes will be activated only when there are no or not enough “sleeping nodes” within the intersection region. Therefore, Algorithm 1 can be described in details as follows.
n is the number of nodes within the intersection region of
(i) If there are nodes within the regions
when the target is in the region
(ii) If there are nodes only within the region
when the target is in the region
(iii) If there are nodes only within the region
When
According to the analysis in Section 3.1, the target will appear in the intersection region of
The activation algorithm.
3.3. Node Working Mode
In order to reduce energy consumption of the network and ensure the network can monitor the target within the tracking region at any time, the nodes cannot work at a fully closed status. Therefore, we divide the work modes for nodes into the following situations.
(a) Tracking Mode
Working in the tracking mode, the nodes can sense, send, and receive messages. The microprocessor is activated and the nodes can estimate the position of the target.
(b) Monitoring Mode
The nodes can sense and receive messages in the monitoring mode. The microprocessor is on standby, and it can be activated only when the sensor data exceed the threshold or command information reaches.
(c) Sleeping Mode
Working at the sleeping mode, the nodes would close the sense module and communication module. And the microprocessor goes to sleeping status. However, the nodes will turn to monitoring status until the timer or the radio-trigger awakes them.
The proposed PRSA algorithm is a distributed tracking algorithm instead of a centralized one. The working mode of each sensor node relies on its neighboring sensors, but not the central server. The normal sensor nodes are switched between the tracking mode, the monitoring mode, and the sleeping mode. The specific implementation is described as in Algorithm 2.
Change to monitoring mode; Change to monitoring mode; Detecting target; Broadcast “wake” message to one hop neighbour; Change to target mode; Change to sleeping mode until receive “sleep” message; Broadcast “wake” message to one hop neighbour; Tracking target; Tracking target; Broadcast “sleep” message to one hop neighbour; Change sleeping mode;
When a target comes into the sensing regions, the nodes that monitor the target will turn to the tracking mode and keep the tracking status until the target leaves the sensing regions. When the target leaves the sensing regions, the tracking nodes will turn back to the sleeping mode. If the tracking node is one of the nodes that closest to the target of last time interval, the tracking node will broadcast a “sleep”
message to neighboring sensors in its one hop. If the neighboring nodes don't detect the target and they are not the activated nodes at present moment, then they will turn to the sleeping mode. In this way, the time of the nodes at the monitoring mode will be shortened and the energy consumption of the network will be reduced.
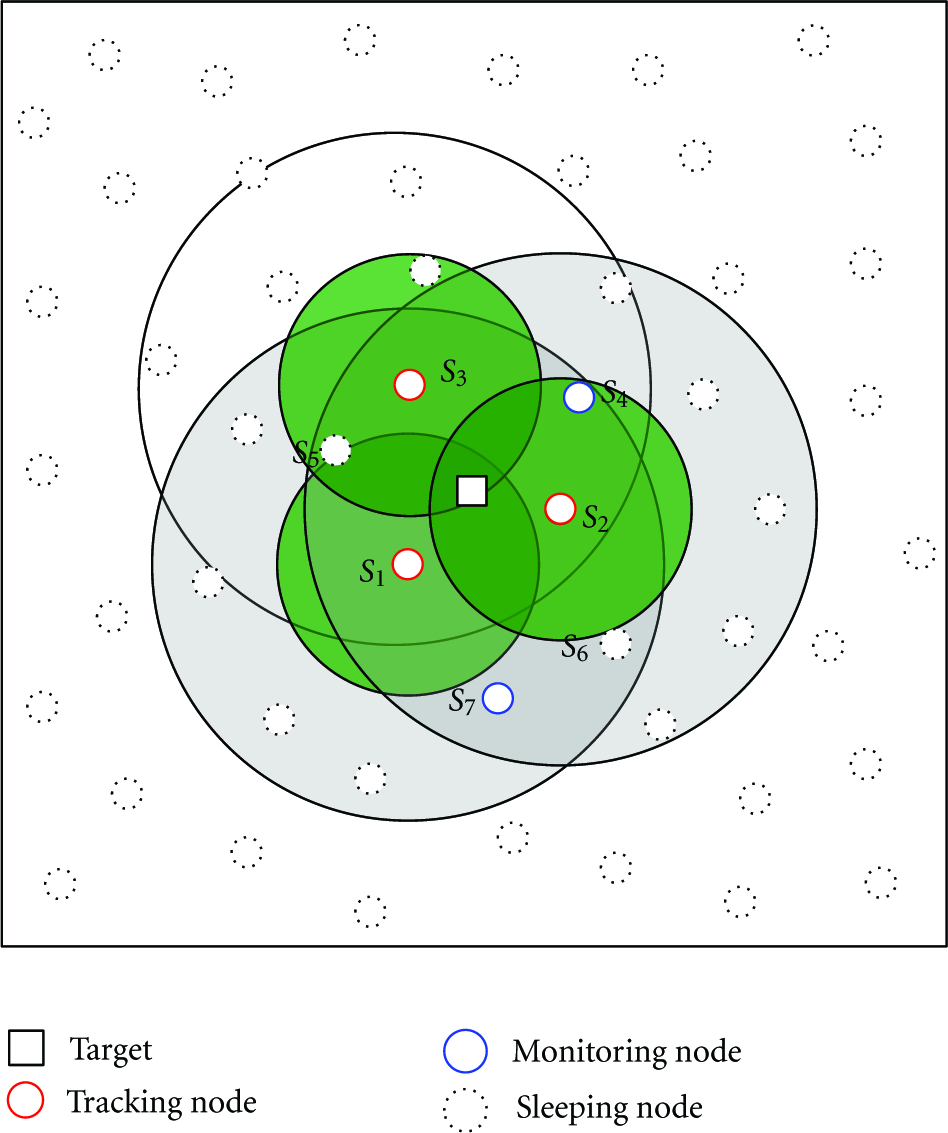
At time t, the nodes which participate in tracking the target are shown in Figure 4. At time

The working mode of nodes.
When the sleeping nodes are awaked by the timer, they begin to monitor the target. The monitoring nodes will turn back to sleep if they do not detect the target. If the sleeping nodes are activated by the activation strategy described in Section 3.2, they will work on the monitoring mode. And the monitoring nodes will turn to the tracking mode unless they monitor the target. Or else they will remain in the monitoring mode until they receive the “sleep” message. Once the node receives the “sleep” message, it will turn to the sleeping mode immediately, which can avoid the long-term usage of one single node.
4. Simulation Results
The energy consumption is closely related to the number of sleeping sensor nodes, monitoring sensor nodes, and tracking sensor nodes. E is the energy cost in one step, so the energy model can be described as [23]

In this paper, we analyze the performance of our algorithm via simulations. The network model for simulation consists of uniformly and randomly deployed 250 nodes in a square area over 500 m × 500 m. We assume the communication coverage range is 60 m, the sensing coverage range is 30 m, and the time interval is set as one second. In Figure 6, The blue line is the actual trajectories of the moving target. We detect the target 50 times when the target cross the scope, where 62 nodes (the red circles) are activated, only 38 nodes (the red circles with “+”) participate the tracking. To reduce the energy consumption, most nodes (the blue circles) in the network work are at sleeping mode.
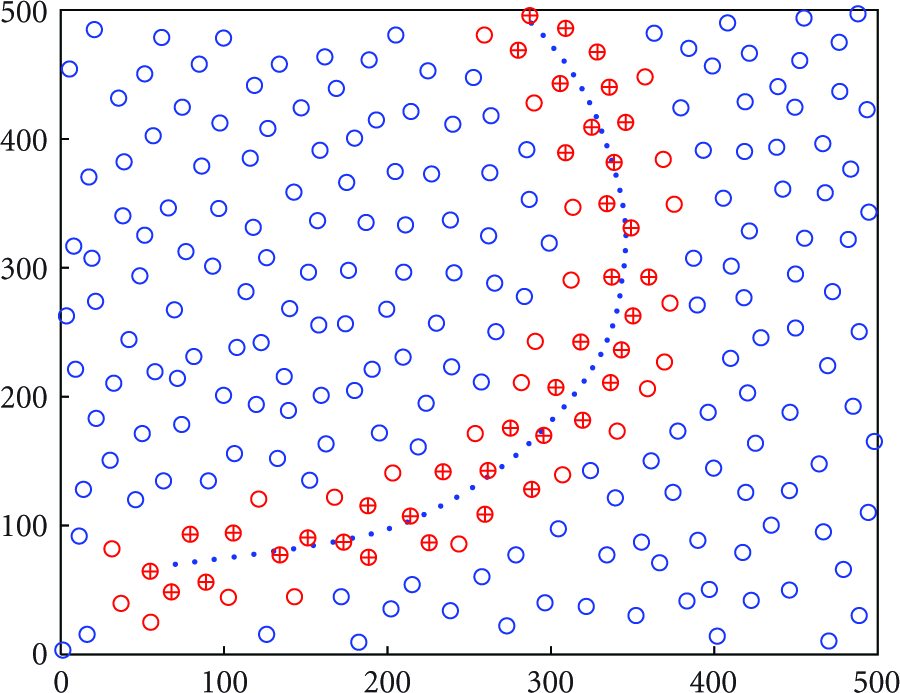
The actual trajectory of the moving target and the activated nodes.
We focus on the energy consumption as performance by comparing our energy consumption results with distributed sensor activation algorithm (DSA2) [18] and Naive method, where each sensor node monitors its sensing range all the time and reports the location of target to the sink node periodically [24].
Figure 7 shows the simulation result of increasing sensing range. We run the test with 250 sensor nodes, and we increase the sensing range from 25 m to 50 m in increment of 5 m. From the result, we can find that the total energy consumption in our approach is much less than the consumption energy of Naive and DSA2 approach. Although the number of nodes in the intersection region will increase as the sensing range gets large, our proposed algorithm does not activate more nodes with the increasing number in the intersection region. Only fewest essential nodes are activated to track the target, so we can reduces energy consumption by reducing the number of nodes involved in tracking the target.

The relation between energy consumption of the proposed approaches, DSA2 approaches, and Naive for different sensing ranges.
Figure 8 shows the effect of deploying different sensor nodes on the total energy consumption of our approach and other existing methods. We set the sensing range of the nodes at 30 m, communication range at 60 m. The sensor nodes are varied from 200 to 500 in increment of 100 nodes. With the increase of the sensor nodes, the nodes within the intersection region will increase, just like the situation of large sensing range. The effect of large number nodes is almost the same with large sensing range, and the energy consumption slightly increases with the increase of the sensor nodes.

The relation between the energy consumption and network scale in the proposed approach, DSA2 approach and Naive.
The relation between the total number of deployed nodes and the total number of participating nodes in our proposed approach and DSA2 approach is shown in Figure 9. From the figure, we can find that the total number of participating sensor nodes in our approach is less than the DSA2 approach. Thus, that implies our approach can reduce the energy consumption and prolong the lifetime of the network.

The relation between the total number of deployed nodes and the total number of participating nodes in the proposed approach and DSA2 approach.
In Figure 10, different velocities of the moving target are taken into consideration in our approach and DSA2 approach. When the velocity is large, just like the situation of small sensing, the effect of large velocity of the target is almost the same with small sensing range of sensors. The result shows that with the increase of the velocity of the moving target, the network energy consumption will decrease. That is because the number of the active nodes decreases, while the target velocity increases and this will reduce the network energy dissipation.

The effect of target velocity on the energy consumption in the proposed approach and DSA2 approach.
Figure 11 shows the impact of the moving target velocity on the network energy consumption and missing rate in our approach and DSA2 approach. The missing rate is defined as the percentage that nodes fail to detect the target. From the result, we can see that the missing rate is very low when

The effect of target velocity on the missing-rate probability in the proposed approach and DSA2 approach.
Once there is no node within the intersection region of
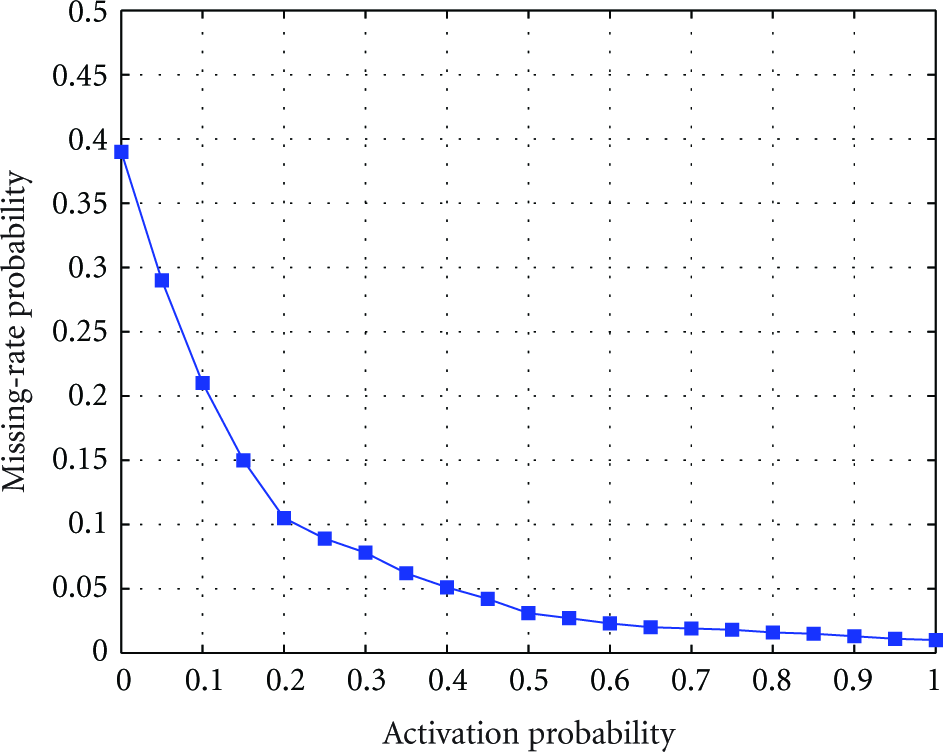
The effect of the activation probability P on the missing-rate probability.
From the simulation results, we can conclude that if the target's moving region in one second satisfies
5. Conclusion
Focusing on the energy problems in the target tracking of wireless sensor networks, we propose an energy-efficient sensor-activated strategy. Due to the uncertainty and unpredictability of real-world targets' motion, it is difficult to guarantee high accuracy of the prediction by using traditional prediction strategy. In this paper, we predict the moving region of target in the next time interval that is proved to be in the communication intersection region instead of predicting the accurate position. Then we establish an activated strategy to activate the fewest essential number of sensor nodes within the communication intersection region to monitor the target's location in the next time by analyzing the position relation between the target and the nodes. The proposed algorithm can reduce the number of nodes being involved in tracking the target to prolong the network's operational lifetime. Simulation studies show that the proposed algorithm provide significant energy savings, while side effect on target tracking rate is not too negatively improved in terms of energy-quality tradeoff.
Footnotes
Acknowledgments
This work was supported by the National Science and Technology Major Project (2009ZX07528-003-09), and Key Scientific and Technological Projects of Chongqing (CSCT, 2010AA2036).