
Abstract
This paper addresses the cluster partitioning problem in wireless sensor networks deployed in a continuous area. We present the model of the network and describe its operational details firstly. Both single-hop and multihop transmissions with cooperative Multi-Input Single-Output (MISO) scheme are considered for the intercluster communications. Besides, uniform and linear data fusions are discussed. Then, the calculations of energy consumptions are derived. Different from other researches, the energy consumptions of intracluster communication in each cluster are included and modeled as functions of the cluster size. Finally, we simulate all possible cluster partitions by changing the numbers of clusters and cooperative transmitting nodes and find the maximal network lifetimes. As a result, the relationships between cluster partitions and network lifetimes are clarified in different situations.
1. Introduction
In recent researches, wireless sensor networks (WSNs) have witnessed a tremendous upsurge due to their great potential in many application domains, including industrial control, environment monitoring, and target tracking [1]. In some scenarios, a WSN needs to be deployed in continuous areas and the information collected is necessary to transmit to a base station (BS) periodically, such as traffic surveillance on highway and gas monitoring in mine tunnel [2].
In general, a WSN consists of large numbers of spatially distributed sensor nodes. These nodes are usually powered by small batteries with limited energy, for which replacement or recharging is quite difficult if not impossible. That is, finite energy can only support the transmission of a finite amount of information. Hence, minimizing energy consumptions and prolonging network lifetime are of great importance for the design of a WSN.
The clustering approach has been proved to be one of the most effective mechanisms to improve energy efficiency in WSNs [3]. In cluster-based WSNs, each cluster has a cluster head (CH) which can manage the nodes in the cluster. And the CH can execute data fusion (aggregation) to reduce the amount of data and save the overhead of intercluster transmission (from the cluster to the destination). For such cluster-based WSNs, many methods can be exploited to reduce energy consumptions of intercluster transmission [4]. Cooperative Multi-Input Multi-Output (MIMO) is one typical scheme of them.
The original MIMO scheme based on antenna arrays can achieve spatial diversity in fading channels, which requires less transmission power than noncooperative Single-Input Single-Output (SISO) scheme [5]. However, it is difficult to apply MIMO scheme directly in WSNs because of the limited sizes of nodes which can only support a single antenna. Fortunately, if multiple nodes in a cluster could cooperate on data transmission and reception, a cooperative MIMO scheme can be constructed to improve communication performance [6].
The authors of [6, 7] have proposed some cooperative MIMO schemes for single-hop transmission in a clustered WSN and analyzed their energy efficiency. It was shown that the number of cooperative nodes at both the transmission and reception sides should be selected with respect to the intercluster distance in order to minimize the total energy consumptions. Although a cooperative MIMO scheme can improve the system performance in terms of energy conservation, it cannot solve the energy imbalance of clusters caused by different transmission distances to the BS in single-hop WSNs. Using a cooperative transmitting (Multi-Input Single-Output, MISO) scheme, Bai et al. [8] have investigated the unequal cluster partitioning for single-hop transmission in a continuous area WSN so as to balance energy consumptions among the clusters and prolong the network lifetime.
According to the results of [8], clusters closer to the BS should have smaller sizes and the farther ones have larger sizes in single-hop WSNs because more energy consumptions for data transmitted to the BS are required with the increase of distances to the BS. However, in each cluster, energy consumptions of intracluster communication (between nodes and the CH) were ignored in the model of [8]. In reality, such energy consumptions will vary with the cluster size. Clusters with larger sizes need more energy consumptions for intracluster communication than those with smaller sizes. Furthermore, in [8], the amount of data after fusion in each cluster was assumed to be the same, which is not practical to describe some situations. It is possible that the information of nodes has not high correlations and each node has its different data. In such a case, the amount of data after fusion should increase with the cluster size.
Yuan et al. have extended the work in [6] and incorporated cooperative MIMO scheme with multihop networking [9]. Their results showed that cooperative MIMO scheme can be also effective in energy saving for multihop WSNs. In spite of that, similar to previous single-hop networks, the energy imbalance problem still exists in multihop WSNs. For example, in a network with equal divided clusters, the clusters closer to the BS may deplete their energy much faster than others because of higher traffic load. With consideration of the above problem, Mashreghi and Abolhassani [10] have developed an optimization model in a continuous area WSN and found the optimal parameters of the network, such as numbers of clusters and cooperative nodes, and cluster sizes.
It was shown in [10] that for multihop networks, the optimal cluster partition is the same as for single-hop in [8]: clusters farther from the BS should have larger sizes, but for different reason that clusters closer to the BS have to transmit more data and need shorter transmission distances. Nevertheless, the amount of data after fusion in each cluster has been considered also to be identical and independent of the cluster size in [10]. And the energy consumptions of intracluster communication never changed with the cluster size despite that it was considered.
This paper expands and develops the works in [8, 10]. In this paper, we discuss the cluster partitioning problem in single-hop and multihop WSNs deployed in a continuous area. Distinct from [8, 10], the energy consumptions of intracluster communication in each cluster are included and considered as functions of the cluster size in our model. Moreover, two kinds of data fusion are discussed, respectively. One is the conventional assumption, the uniform fusion, in which the amount of data after fusion is fixed as a constant. The other is the linear fusion, in which the amount of data after fusion increases linearly with the cluster size. To the best of our knowledge, this paper makes the first attempt at investigating the cluster partitioning with the linear fusion. By giving the length of the network, we change the numbers of clusters and cooperative transmitting nodes in each cluster and simulate all possible cluster partitions in order to investigate the variation of network lifetimes. As a result, we present the maximal network lifetimes and derive their relationships with cluster partitions in different situations. In our previous research [11], we have investigated the effect of cluster size on cluster lifetime in single-hop separated farmland WSNs. The analysis of [11] has been focused on a cluster, instead of the whole network and cluster partitioning. This is the difference between our previous work and this paper.
2. System Description
In this section, we present the network model and describe its operational details. To make our paper more readable, main symbols used are listed in Table 1.
List of main symbols.

2.1. Overview
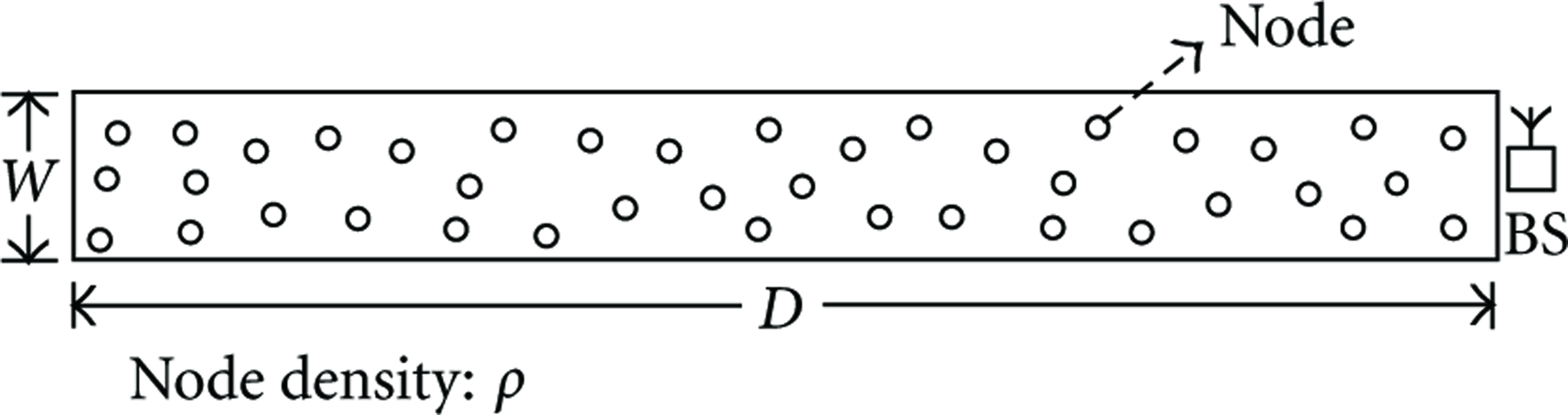
To investigate the aforementioned networks which can be used in traffic surveillance on highway and gas monitoring in mine tunnel, let us consider a simplified linear network where the BS is located at the right end and the sensor nodes are uniformly deployed in a continuous area with node density ρ, as illustrated in Figure 1. The length of the network D is much larger than the width W, and we can divide the whole network into M rectangle clusters. As shown in Figure 2, the position of the BS is
Network model.

Cluster partitioning of the network.
2.2. Operational Details
In the model of Figure 2, each cluster needs to report their data periodically to the BS by single-hop or multihop transmission. Without loss of generality, let us focus on the ith cluster to describe the operational details of the model. In each round, the following five steps will be executed successively in the ith cluster.
Step 1 (CH selection).
The system requires a CH to collect and fuse data of all nodes in the cluster and coordinate intercluster transmission. In view of the fact that the CH does more work than other nodes, it is necessary to select the node which has the most remaining energy to serve as the CH.
Step 2 (data gathering).
In this step, each node transmits its L bits of sensed data to the CH by a multiple access method, which is assumed to be perfect (no contention or retransmission).
Step 3 (data fusion).
After receiving the data from all nodes, the CH fuses (aggregates) these data based on their redundancy.
To calculate the amount of data after fusion in a cluster, an empirical equation obtained in [12] can give us some help. After a new source node, which is the jth node in a cluster, joins the existing set of nodes, the amount of fused data can approximately be calculated by

Hence, we discuss the uniform fusion and linear fusion, respectively, in the following sections. For simplicity, it is assumed that all nodes are distributed uniformly and the distances between adjacent nodes are identical. In the uniform fusion (
As for the linear fusion, we assume that the amount of data after fusion varies directly with the cluster size or the sum of corresponding nodes as

Step 4 (data broadcast).
In this step, the CH selects
The case
Step 5 (intercluster data transmission).
In this step, the CH and
3. Energy Consumptions
In this section, we introduce the calculation of energy consumptions in our model.
3.1. Energy Consumptions of a Node
Here, we use a simple model in which the total energy consumptions of a node can be categorized into two main parts, the energy consumption of the transmission mode and that of the reception mode. This model is widely validated and used by researchers in [6–10].
3.1.1. For Data Transmission
When a node transmits data, its transmission circuits will work. As shown in Figure 3, this part of circuits includes the D/A converter (DAC), the mixer, the active filters, the frequency synthesizer (LO), and the power amplifier (PA) [14]. For the simplicity of estimation, the digital signal processing blocks (coding, pulse-shaping, digital modulation, and so on) are omitted. Except the power amplifier, the power consumptions of all the other blocks are regarded as constants and we use

Transmission circuits of a node.
According to [14], the power consumption of the power amplifier 

In (4), C is the product of various communication constants which is defined as

Although all nodes are fixed, the environment is mutable, for example, the movement of vehicles or human can affect the channel. In such a case, the channel can be regarded as fading channel. Hence, let us assume that the network operates under a flat slow Rayleigh-fading channel, that is, the channel gain is a scalar. In other words, on top of the k-law path loss, the signals are further attenuated by a scalar fading matrix 




3.1.2. For Data Reception
Figure 4 shows the reception circuits of a node, which consist of the filters, the low-noise amplifier (LNA), the mixer, the LO, the intermediate frequency amplifier (IFA), and the A/D converter (ADC) [14]. In our model, the power consumptions of all these blocks are also regarded as constants and we use

Reception circuits of a node.
Hence, when a node receives data, the energy consumption per bit is given by

3.2. Energy Consumptions of a Cluster
Using
Step 1 (CH selection).
This step is assumed to be completed by the BS, in which the energy is unrestrained. And it is noted that when all nodes receive the message from the BS that which one will serve as the CH, some energy consumptions are required. However, these energy consumptions are independent of the cluster partitioning since they are mandatory and identical for all nodes. Hence, we ignore them in the following discussion.
Step 2 (data gathering).
In this step, all nodes send their data and the CH receives them. Since any node can act as the CH, the position of the CH is not fixed. To calculate the total energy consumptions of all nodes, average path loss of intracluster communication is used in our model. In detail, the average path loss is denoted as


Moreover, the receiving energy consumption of the CH in this step can be calculated from

Step 3 (data fusion).
After receiving the data from all nodes, the CH fuses these data. The energy consumption of data fusion at the CH can be represented as

Step 4 (data broadcast).
In this step, if the single-hop transmission is used, the CH broadcasts the fused data and the cooperative transmitting nodes receive them. The energy consumptions of the CH and all cooperative transmitting nodes can be represented, respectively, as
If the multihop transmission is used, besides broadcasting the data of its cluster, the CH must receive the data from the 
Step 5 (intercluster data transmission).
In this step, the CH and cooperative transmitting nodes transmit the data to the BS or the next CH cooperatively. Accordingly, we obtain the total energy consumptions in this step as follows.
In single-hop transmission,
In multihop transmission,
where the average path loss of intercluster communication in single-hop transmission is calculated by


where the average path loss of intercluster communication in multihop transmission can be expressed as


To sum up the above energy consumptions of all five steps, we achieve the total energy consumptions of the ith cluster per round, which is represented by
4. Lifetime Definitions
In this section, we give the definitions of lifetimes and present the problem of cluster partitioning.
4.1. Cluster Lifetime
In our model, it is assumed that the CH and cooperative transmitting nodes are selected from all nodes based on their remaining energies. Therefore, on the whole, we consider that the energy consumptions among all nodes in a cluster are to be balanced and all nodes have equal lifetimes approximately. If we assume that each node has J joules in its battery, the lifetime of the ith cluster can be defined as the possible total transmission rounds, which can be calculated by

4.2. Network Lifetime
In clustered WSNs, the data of all nodes in a cluster is fused by the CH for reducing the redundancy and then transmitted to the BS. From the BS's point of view, every cluster can be regarded as the unit which transmits data. If any cluster dies, the network will lose the coverage of corresponding area. Hence, the network lifetime is defined as the minimum lifetime of clusters in our model:

According to (24), we find that different cluster partitions and numbers of cooperative transmitting nodes may result in different network lifetimes. For the sake of maximizing network lifetime, it is necessary to investigate the appropriate cluster partitions and cooperative MISO schemes, which will be clarified below. It is noted that the cluster partitioning is a multivariable and discrete function, which means that the analytic results are hard to derive. So it is expected that some qualitative conclusions can be derived from our simulation results.
5. Numerical Results
In this section, let us operate the simulations and analyze their results. The system parameters used in our simulations are shown in Table 2. Although the following simulations are executed under a given length of network
Values of system parameters.
5.1. Single-Hop Transmission
5.1.1. The Uniform Fusion
We change the number of clusters from 1 to 20 and calculate all possible cluster partitions then derive Figure 5, which shows the maximal network lifetimes in single-hop transmission with the uniform fusion. From this figure, it can be found that the maximal network lifetimes increase with the number of clusters. The reason lies in the fact that, with the uniform fusion, the amount of data after fusion in each cluster is small (100 bits) so that the energy consumptions of intercluster communication is relatively minor compared with those of intracluster communication. Consequently, larger numbers of clusters make these clusters with smaller sizes, which decrease their energy consumptions of intracluster communications and obtain longer lifetimes.

Maximal network lifetimes with different numbers of clusters in single-hop transmission (the uniform fusion).
Table 3 shows the optimal numbers of cooperative transmitting nodes and optimal cluster sizes with
Optimal cluster partition when the number of clusters

5.1.2. The Linear Fusion
When the linear fusion is applied, by changing the number of clusters M from 1 to 20, we depict the maximal network lifetimes of single-hop transmission in Figure 6. From this figure, we can see that the maximal network lifetime increases with the number of clusters and saturates at
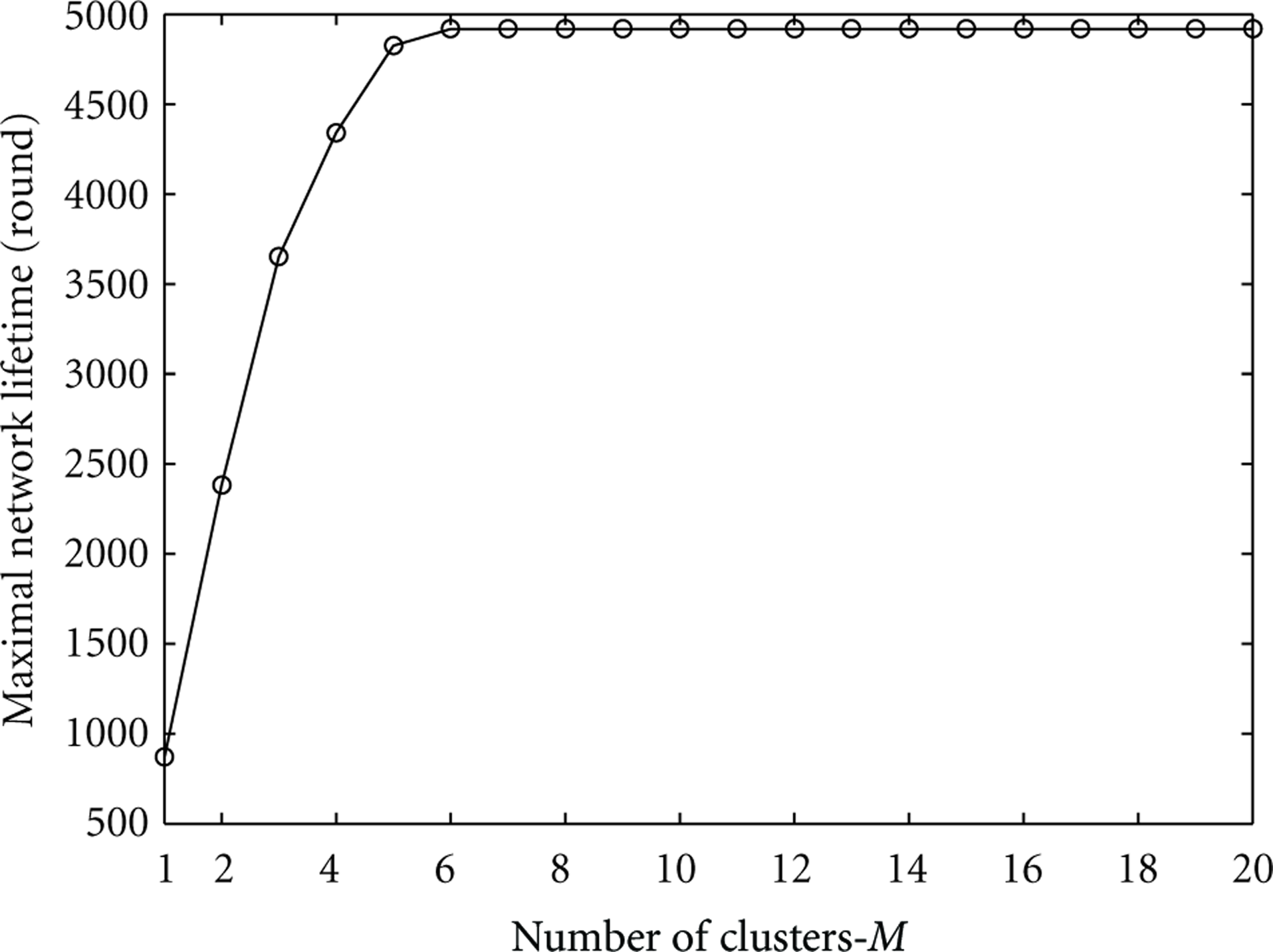
Maximal network lifetimes with different numbers of clusters in single-hop transmission (the linear fusion).
Now let us put an emphasis on the case
Optimal cluster partition when the number of clusters

From Table 4, we can also judge that the Mth cluster determines the maximal network lifetime when the number of clusters

Maximal lifetimes of the Mth cluster in single-hop transmission (the linear fusion).
In Figure 6, the maximal network lifetime remains unchanged when
5.2. Multihop Transmission
5.2.1. The Uniform Fusion
Figure 8 shows the maximal network lifetimes with different numbers of clusters in multihop transmission if the uniform fusion is used. Similar to the results of single-hop transmission shown in Figure 5, when the uniform fusion is employed, the energy consumptions of intracluster communication are more dominant than those of intercluster because of larger amount of data transmitted. Hence, with the increase of M, the clusters are arranged with smaller sizes, which means that less energy consumptions of intracluster communication are required. And the maximal network lifetimes increase accordingly, as shown in Figure 8.

Maximal network lifetimes with different numbers of clusters in multihop transmission (the uniform fusion).
5.2.2. The Linear Fusion
Next let us focus on the linear fusion again. We show the maximal network lifetimes in Figure 9. Similar to Figure 6, as M raises from 1, the maximal network lifetimes increase with the same reason.

Maximal network lifetimes with different numbers of clusters in multihop transmission (the linear fusion).
When the number of clusters

Six optimal cluster partitions when the number of clusters
When M continues to increase from 12, the sizes of the first and second clusters have to deviate from the preferred combination in order to satisfy the given M. Hence, the maximal network lifetimes also decrease gradually. Furthermore, we change the length of network and obtain similar simulation results.
6. Conclusions
In this paper, we have investigated the cluster partitioning with cooperative MISO scheme in a continuous area WSN. Unlike existing works in this field, this paper has included the energy consumptions of intracluster communication as the functions of the cluster sizes. Both single-hop and multihop transmissions have been considered for the intercluster communications. Moreover, the uniform and linear data fusions also have been discussed in the model.
By numerical simulations, we have presented the network lifetimes in various situations. If the uniform fusion is considered, the network lifetime increases with the number of clusters in either single-hop or multihop transmission. And the clusters farther from the base station should be assigned with smaller sizes in single-hop transmission. As for the case of linear fusion, our conclusions depend on the transmission schemes: in single-hop transmission, the optimal cluster partition indicates that the cluster size decreases with the increase of its distance to the base station, and the farthest cluster determines the maximal network lifetime; in multihop transmission, the clusters closer to the base station have a preferred combination which maximizes the network lifetime. Although this paper has focused on the one-dimension model, a two-dimension network can be divided into one-dimension networks. Hence, the conclusions derived here can be extended into the two-dimension situations.