
Abstract
We proposed a Critical Safe Distance (CSD) model in V2V (Vehicle-to-Vehicle) communication systems. By elaborately analyzing the vehicular movement features for car following, we proposed a CSD definition which well balances the requirement between driving safety and traffic throughput efficiency. Different from the time-headway and traditional braking models, our model fully takes the relative movement status of the front and back cars into consideration and derives a CSD which is more practical and effective. We also explore the needed CSD during lane changing for multilane case. Numerical results show that our proposed model could provide reasonable safe distance settings under different movement scenarios, which has the capability of avoiding collisions and improving traffic throughput at the same time.
1. Introduction
Nowadays, traffic accidents have been happening uncountable times each year, taking thousands of lives or making them handicapped, outnumbering any deadly diseases or natural disasters in the world. Therefore, exploiting the new technologies, for example, wireless sensor networks, is required as a solution of reduction of these saddening and tragic events. As a consequence, Vehicular Sensor Networks (VSNs) have been a hot topic and received intensive research works in the recent years. To enhance driving safety, vehicles can be organized into Vehicle-to-Vehicle (V2V) and Vehicle-to-Roadside (V2R) networks based on communicating sensors, which can provide additional information to help to reduce accidents such as traffic density, road segment average velocity, weather or road condition, and drivers' emotion. If sensors could be further addressed by IP protocol, say an IP-enable VSNs, the interconnection to internet will bring lots of conveniences and merits such as GIS (Geographic Information System) information, traffic status report, weather, and road condition forecast) to make our driving more safety and comfortable.
Before applying VSNs technologies on road, we should first explore the deadly reasons which threat drivers' lives. Although there are many factors resulting in accidents such as weather condition, roadway status, and mechanical failure the dominating one is the reactive time of the drivers. By nature, humankinds suffer from perception limitations with a typical reactive range of 0.75 seconds to 1.5 seconds on emergency events. As illustrated in Figure 1, three vehicles A, B, and C are driving on a highway platoon. When vehicle A brakes suddenly, vehicle B can start to decelerate after a driver reaction time; that is, the duration when an event is observed and when the driver actually applies the brake, to avoid a collision. However, due to the line-of-sight limitation from B, vehicle C may not decelerate until its driver has seen the rear brake light of vehicle B. In such case, collision may be inevitable.

Collision happens due to human perception limitation.
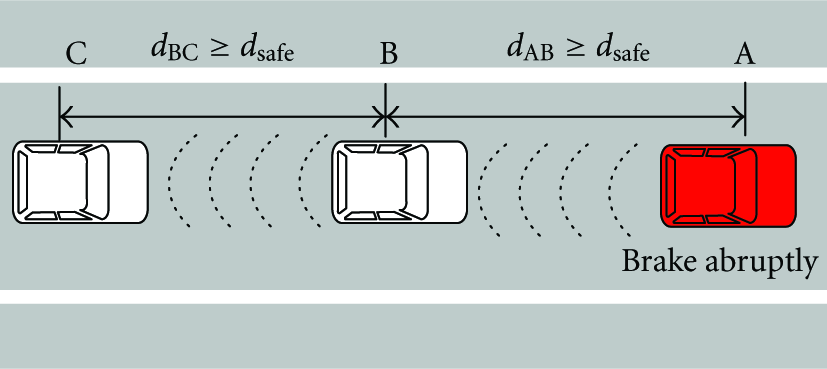
To solve the above problem, many studies have been done and the proposal to warning drivers based on V2V communications, such as VSNs, is attractive. In this research field, the Cooperative Collision Avoidance (CCA) strategy is an important category which aims at offering earlier warnings to drivers using V2V communications. As the example shows in Figure 2, once vehicle A encounters some accident and brakes suddenly, the warning messages will be directly sent out to B and C when they are in the radio range of A. In this case, C will have extra time in advance to response to this emergent event and at the same time, both B and C could prebrake by detecting the wireless signal from A instead of watching the rear light with inborn perception and reaction limitation. Besides, in this discussed scenario, it is worth noting that vehicles should maintain a distance larger than Safe Distance (SD) between each other to guarantee the vehicle's stopping immediately and successfully to avoid collision. As shown in Figure 2, the distance between A and B, that is,
Collisions avoidance based on V2V communications.
The rest of this paper is organized as follows. In Section 2, we outline previous related works on SD determination. In Section 3, the theoretical basis on movement features of car following is introduced. Section 4 gives the assumptions and definition for CSD. The algorithmic models of our CSD in single lane and multi-lane case are presented in Sections 5 and 6 respectively. The method of notification zones' setting to implement multilevel warning scheme and provide references for beacon frequency determination is proposed in Section 7. Section 8 shows the numerical results and performance evaluation of our CSD model. Our paper is concluded in Section 9 followed by cited references.
2. Related Works
Lots of works have been done to reduce the collision possibilities with wireless communications help. In our work, we class these researches into two categories: one for avoiding collisions by designing proper protocols for warning messages dissemination; another focusing on alleviating collisions by wireless signal transmission but with research emphasis on vehicles' movement features, collision scenarios, road or weather conditions, and drivers' subjective reasons. Our work could be sorted in the latter class.
For studies with emphasis on vehicles moment features, an influential work is from Brackstone and McDonald [1] who had elaborately analyzed the car-following model especially for safety applications. Although they just discussed the movement characteristics in single-lane case during car-following process and did not refer to the term of SD, their work actually suggested that modeling SD is an important way to guarantee driving safety in car-following scenarios [2]. Based on SD, warning messages could be disseminated in advance to alert drivers for possible collisions. The latest published research results by Werling et al. [3] suggested an ICS (Inevitable Collision States) and PCS (Probabilistic Collision States) based driving safety assessment strategies for single road lanes. Their work considered the collision probability of the investigated vehicle and the collision avoidance behavior of the other vehicles at the same time. The authors also just discussed the case of single lane and their evaluation results showed the relevance of this safety assessment approach which allows to reduce computation time by using slower replanning cycles and to avoid unnecessary maneuvers caused by nonconservative safety assessment. Adell et al. [4] investigated the effectiveness of an assistance system for keeping safe speed and distance and showed positive effects of this system in terms of fewer alarm situations, shorter alarm lengths, shorter reaction times, increased headway, and better interactions with drivers. Even their work did not give the statistical analysis to SD and relied on feedbacks from drivers and logged driving data to output suggested results, they provided a powerful evidence for the necessity to introduce safety distance into driving assistance. Kannan et al. [5] proposed an Intelligent Driver Assistance System (I-DAS) which focuses on generating the alert messages based on the context aware parameters such as driving situations, vehicle dynamics, driver activity, and environment. In I-DAS, an adaptive cruise control system is embedded for alerting driver to reduce speed and maintain SD between vehicles and passengers. This system retrieves related driving and environment data by embedded sensors and returns the corresponding suggested actions based on previous collected relevant statistics. Therefore, their work is built on expert database and did not give the general statistical expressions to SD. Biral et al. [6] proposed a driver-support system that helps to maintain the correct speed and intervehicle distances with respect to lane curvature and other vehicles ahead. This work mainly focused on the warning maneuvers for drivers by comparing their behaviors to suggest system actions. Besides, they just took the different situations of the leading vehicles into account and did not consider the relative movement status between the front and the back cars. Wu et al. [7] analyzed the SD for avoiding collisions when the leading car encounters obstacles or some emergency. However, they did not take the different movement status of the following car and traffic efficiency into consideration. Besides, the SD when the leading car drives normally, that is, without emergency or obstacles ahead, was not considered. Luo et al. [8] proposed the traditional braking model which derived the SD considering the influences from vehicular mechanical braking ability and relative velocity. But, they assumed the following car drives with a constant speed and did not discuss the scenario when the leading car suddenly stops. Ayres et al. [9] and Touran et al. [10] introduced the classical time-headway model. This model is based on the abstracted real test data from highway vehicles and uses the real-time distance between vehicles' heads as the metric to enhance driving safety. Although simulation results showed this work to be very effective in highway, its reliability is somehow weak because the authors mainly focused on traffic efficiency and did not consider the case where large velocity difference occurs between neighboring vehicles. Thereupon, the calculated SD is smaller and not enough to guarantee safety. Hiraoka et al. [11] presented a new metric, that is, Deceleration for Collision Avoidance (DCA), to evaluate the risk level to collide with the front obstacle. They derived the needed deceleration to avoid collision which could be used as the braking warning threshold for the Forward Obstacle Collision Warning System (FORCWS). This work just considered the case when obstacles or emergency is ahead of vehicles driving on single lane and did not take the normal acceleration/deceleration stages into account. Yan et al. [12] have given the mathematical expressions to the important parameters of cooperative collision warning systems (CCWS), such as inter-vehicle distance, reaction time, relative velocity, and conditional probability of collisions. They derived warning distance based on proposed Five-Second Rule, namely, the sum of three second for stopping plus the two Second reaction time, that is, five-second × velocity. Therefore, their obtained values were too realistic to guarantee safety under different mobility configurations. However, their work still built a better theoretical foundation for future researches on this field. Huang and Lin [13] designed a cooperative collision early-warning system (CCEW). They presented the early warning strategy by exchanging the relationship information (RI) between vehicles when they drive on the curve. Their work focused on deriving the collision probability by monitoring the distance between investigated vehicle and defined Closest Point of Approach (CPA). The discussed distance was not given by theoretical analysis but measured through wireless beacons. Garcia-Costa et al. [14] proposed a statistical model for evaluating the number of collided vehicles in a platoon. Their major contribution was providing a way to evaluate the influences of density, velocity, acceleration, and delay to collision probability. They also explored the impact of probability distribution of initial inter-vehicle distance to the resulted SD and collision possibility. Different from our work, they discussed the mobility scenario on single lane and did not consider traffic efficiency improvement.
Based on the research of previous strategies, we proposed a CSD model which has the following contributions.
In single lane case, we analyzed the CSD considering different movement situations of the front and the back car. Besides, instead of assuming uniform or constant speed setting, we made full consideration on the impact from acceleration and deceleration on final computed CSD. Based on the obtained CSD, we introduced a multilevel warning mechanism by defining different notification zones corresponding to various safety requirements. This mechanism could consider the diverse mental tolerance of drivers and at the same time balance the demands between safety and traffic throughput. We also introduced the multi-lane case and gave a detailed analysis to the required SD when vehicles tend to change lane.
3. Theoretical Basis
To introduce our CSD model, we will first explore the movement features of vehicles especially when braking. Based on the analysis to the vehicular moving procedure for car following [1], a braking procedure could be divided into 4 stages as shown in Figure 3.



Vehicle braking procedure.
4. Assumptions and Definition
In this section, we will give some assumptions and define CSD in our model based on the aforementioned movement features.
Assumption 1.
Vehicles could know their own locations involving coordinates on map by GPS (Global Positioning System) and GIS (Geographic Information System).
Assumption 2.
Vehicles could know neighbors' locations, speeds, and accelerations by periodical broadcasting beacons. The typical used localization methods are Receive Signal Strength Indicator (RSSI) under LOS (Line Of Sight) environment or hybrid TOA/AOA [17] algorithms under NLOS (Non Line Of Sight) circumstance. The needed localization parameters could be piggybacked or abstracted in beacons.
Assumption 3.
All the vehicles have the same mechanical brake performance.
Assumption 1 is readily satisfied because GPS and GIS now are popular and cheap for vehicles equipment. Assumption 2 is also reasonable especially in vehicular networks where periodical beacons are necessary for vehicles to inform their neighbors of their current state (velocity, acceleration, position, direction) in order to improve safety conditions. Assumption 3 here makes our analysis simple but will not influence correctness of the final obtained results.
Based on the aforementioned assumptions, we define our CSD as follows.
Definition 1.
Critical Safe Distance in our work is defined as the needed minimum distance between vehicles to avoid collisions based on V2V communications in VSNs.
By this definition, the CSD means that whatever the leading vehicle does, there always exists a feasible maneuver that leads to no collision for the back car. On the other hand “whatever” here has to be properly considered. Assuming a heavy vehicle intersects the leading car path in an instant, if here the safe distance is defined as the stopping distance between vehicles, then whatever actions are to be taken, a tragedy may not be avoided. For this reason, traditional safe distance usually supposes that leading vehicle will not crash and the back car only needs to stop before the relative distance becomes zero. In this sense, our definition seems to be riskful and not suitable. However, we think the above case is also a use case which should be included in the safe distance application range. In fact, by properly setting beacon frequency or introducing some forecasting algorithm, a crash to obstacle is also solvable. In our work, we discuss the probability to use safe distance to avoid collision and give references for beacon frequency setting based on CSD. In this way, there may exist chances to make the following car escaping from colliding with the leading vehicle when it crashes to obstacles ahead. Therefore, our definition is reasonable and universal in most of the cases.
Next, to give our CSD model, we will first discuss the scenario that all vehicles drive in one dimension highway and the results for the multi-lane case will be given later by introducing directions, vertical height of vehicles and the lane-changing maneuver.
5. CSD Analysis in a Single Lane
In this section, we analyze the CSD under different movement configurations for the front and the back car in single lane case. The discussed scenario is shown in Figure 4. Supposing the displacement for A is


An example illustrating CSD.
To deeply explore the CSD in this scenario, we further divide this case into two subcases: in subcase 1 (see Section 5.1), the front vehicle A travels without obstacles or an emergent events ahead, whereas in subcase 2 (see Section 5.2) A has encountered accidents or obstacles and has been forced to brake immediately. Here, we define
5.1. A Travels without Obstacle or an Emergent Event Ahead
According to A's movement status, this subcase can be further classified into 3 situations as follows.
5.1.1. The Leading Vehicle A Is Stationary
Corollary 2.
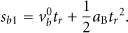
When A is stationary, if B can safely brake after receiving the warning messages from A, the needed CSD for B to avoid collision is

Proof.
When B starts to take braking measure, it generally consists-two parts: the braking operation reaction time and the linearly decreasing progress.
If



5.1.2. The Leading Vehicle A Is Still Accelerating, That Is,
Here, according to the difference between two vehicles' initial speeds, we can discuss this subcases under two scenarios.
(1) A's Initial Speed is Less than B's
When the initial speed of A is less than that of B, there is a large probability to result in collision. Next, we discuss the needed CSD in this scenario.
Corollary 3.
In this situation, the needed CSD for B to avoid collision is

Proof.
If A's speed is greater than B's at

Thereupon, the distance travelled for A by


Finally, the needed CSD for B to avoid collision in this situation is:

If A's speed is still less than B's at
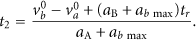
Here, A's speed will not exceed B's until
By

Accordingly, the needed CSD for B to avoid collision in this situation is

(2) A's Initial Speed Is Greater than B's
If A's initial speed is greater than B's, the collision will only occur when B drastically accelerates before braking.
Corollary 4.
In this situation, the needed CSD for B to avoid collision is
Proof.
If B's speed is still less than A's at
If B's speed is greater than A's at

By

Based on aforementioned analysis and (22), (19) can be derived.
5.1.3. The Leading Vehicle A's Is Decelerating, That Is,
We assume A is decelerating with the maximum deceleration
(1) A's Initial Speed Is Less than B's
Consider the following.
Corollary 5.
In this situation, the needed CSD for B to avoid collision is
Proof.
To proof this corollary, we need to divide these subcases into different situations based on B's movement status.
B is still accelerating, that is,
Define B is still decelerating, that is,


It can be noticed that the minimum inter-vehicle distance will also occur when both vehicles stop.
The generated displacement for A to stop safely is


Therefore, the needed CSD for B to avoid collision is

(2) A's Initial Speed Is Greater than B's
Consider the following.
Corollary 6.
In this situation, the needed CSD for B to avoid collision is

Proof.
We also proof this corollary according to B's movement status.
B is still accelerating, that is, B is still decelerating, that is,


Therefore, based on the above analysis and (31), (29) can be deduced.
Corollary 7.
The general expression of the needed CSD to avoid collision can be written as

Proof.
Through our analysis, it is known that Section 5.1.1 is one special case of Section 5.1.2. Combining (10), (19), (23), and (29) leads to (32).
5.2. A Encounters Obstacle or Emergency Ahead
In some cases, the leading vehicle may be forced to stop or even collide to the obstacle ahead. Based on [7], we know that there may generally three subcases for the leading vehicle A when it encounters obstacle or emergency ahead. In the first subcase, the speed of A becomes 0 through normal speed reduction; in the second subcase, after finding the emergency ahead, A begins to brake but finally collides with the obstacle before its speed approaches to 0; in the third subcase, after taking notice of the front obstacle, A will collide with the obstacle with its initial speed before the driver has response time to start braking. Now, we first explore the corresponding CSD values in these three subcases, respectively. Then, in the last part of the section, through the comparison of the three subcases, a reasonable CSD equation is given under the circumstance.
5.2.1. A Successfully Stops by Decelerating
In this situation, A finds the danger ahead and successfully stops through normal deceleration. Therefore, the needed CSD for B to avoid collision can also be obtained based on the analysis in Section 5.1.3.
5.2.2. A Collides with the Obstacle before Its Speed Reduces to Zero
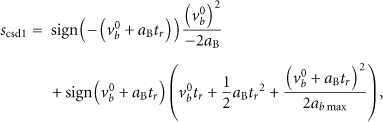
When A discovers obstacle or emergency ahead, generally, it will try its best to brake. However, considering different reaction speeds and driving habits, it may collide with obstacle before its speed decreases to zero. Here, assuming A, B, and C are driving in the same lane as shown in Figure 5. When A and B received the warning messages from C notifying the accident ahead, they will immediately begin to brake. Assuming that A will inevitably collide to C, we next analyze the needed CSD for B to avoid to crash to A. First, we suppose the inter-vehicle distance following an exponential distribution [19] with a parameter λ:

An example illustrating CSD analysis when the leading vehicle encounters an emergency.
Corollary 8.
In this situation, the needed CSD for B to avoid collision is


Proof.
The distance
For A, it will collide with C if and only if the needed distance for A to stop is greater than the distance between them plus the average distance


As a result, the need CSD for B to avoid to collide with A is

5.2.3. A Collides with the Obstacle with Its Initial Speed
If the leading vehicle A is aware of the obstacle or emergency ahead before it has time to start braking, it will collide with the obstacle with its initial speed. Here, considering the few displacement, we can approximately regard A as stationary. After receiving the warning messages and realizing the accident ahead, B then begins to brake. Therefore, to avoid accident, the needed CSD between A and B can also be derived based on the analysis in Section 5.1.1 and from (4) as

Among the above three subcases, the front vehicle A has the largest displacement in the first subcase. Further, A in the third subcase has a shorter displacement than the second due to the absence of any speed reduction action. From (3), the needed CSD between A and B in the third subcase is the greatest among the three situations. However, because B can not predict the upcoming state of A, it is reasonable to assign the calculated CSD for the third subcase as the final critical safe inter-vehicle distance, which is defined as
6. Multilane Scene
To analyze the needed CSD in multi-lane, we introduce a discussed scenario as shown in Figure 6.


Changing lane scene in multilane.
Then the corresponding longitudinal velocity, longitudinal position can be expressed as follows:


Figure 7 shows the detailed lane-changing procedure discussed in our paper. Denote S as the initial lateral distance between


Lane changing procedure.
The type of collisions which may take place during or after





7. Notification Zones Setting
A wise CSD definition could consider the successful collision avoidance and at the same time satisfy traffic throughput on a given road segment. To reach this goal, a strategy to define different warning messages notification zones based on obtained CSD is necessary. Here, we discuss the notification zones setting method in single-lane case and the policy for multi-lane case can be readily extended with this result. According to the above analysis (3), it can be noticed that the CSD

Communication zone.
Besides, our CSD model could also provide references for the interval or frequency setting for notification beacons. We assign t to indicate how long warning messages can be received. Let
8. Numerical Evaluation and Analysis
8.1. Compared Models' Description
In this section, to evaluate the performance of our proposed CSD model on driving safety guarantee and traffic throughput improvement, we implemented our algorithm on MATLAB and compared its results to the traditional braking model [8] and the time-headway model [9, 10]. The braking model also introduced SD conception and computed inter-vehicle distance based on vehicular movement features as well. Thereupon, we can naturally contrast its performance with ours. However, in time-headway model, the author assumed the host vehicle will always be in a safe state after the reaction time. The reason is, to calculate distance between vehicles' heads at different moments, the back car is supposed to be in the same position where was the leading vehicle. In this way, the elapsed time could be obtained between the front of the lead vehicle passing a point on the roadway and the front of the following vehicle passing the same point. As a result, it can be noticed that the definitions for SD in time-headway and our model are distinguishing and seemed not comparable. However, in fact, based on [22], we can note that our definition actually does not influence the safe distance derivation although assuming the leading vehicle may collide to obstacle or immediately stop. Accordingly, it is acceptable to compare the results between our model and the time headway. Next, the numerical results and performance evaluations will be given to show the correctness and effectiveness of our CSD model.
8.2. Numerical Results
The general simulation parameter is listed in Table 1.
General simulation parameters.

First, we will investigate the CSD performance when the front or leading car is on different movement states. Figures 9 and 10 show the CSD performance when the front car is accelerating. Figure 9 shows the CSD performance among time headway, traditional braking, and our proposed model, when the initial speed of the leading car, that is,
A is accelerating and its initial speed is less than B's.

A is accelerating and its initial speed is greater than B's.
Figure 10 shows the CSD results when the leading car has a bigger initial speed than the rear car. Here, the two vehicles are both accelerating with
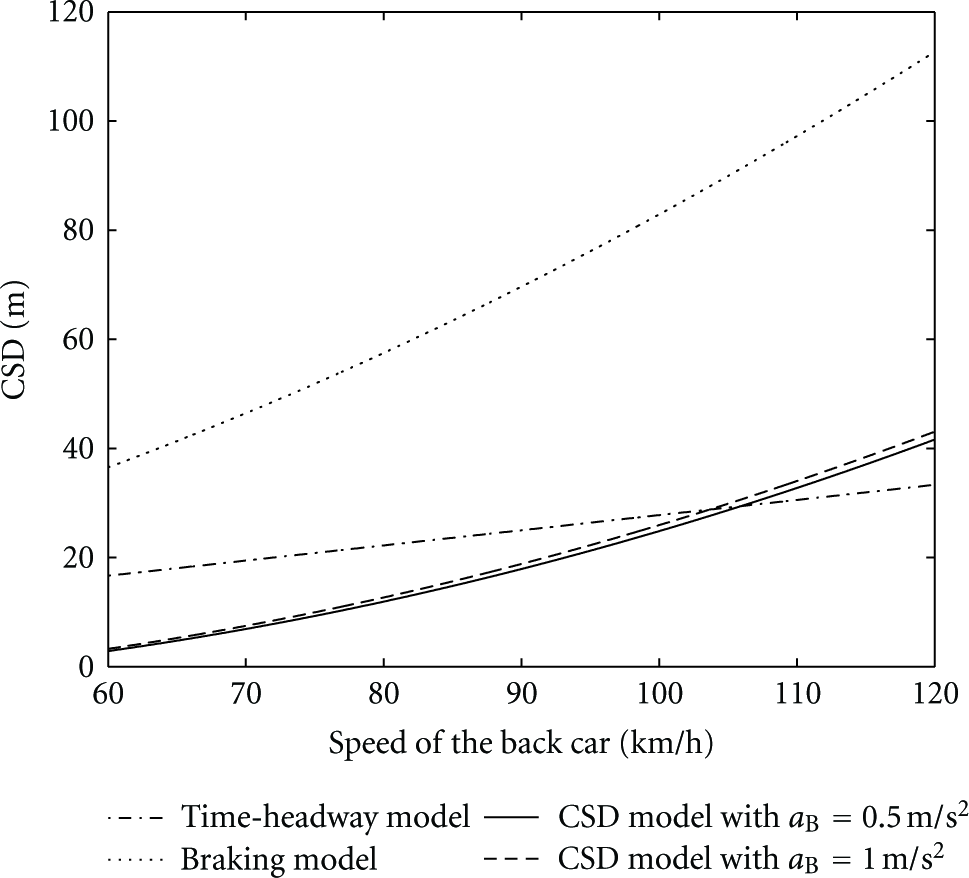
Figures 11 and 12 give the CSD performance when the leading car has a negative acceleration or in an other words is decelerating. Figure 11 shows the case where the leading car's initial speed is less than the back car's. It can be noticed that our proposed model outputs the CSD in between the other two models. Here, traditional braking model overestimates the crash risk and gives a too large CSD, whereas the time-headway model underestimates the risk due to focusing on traffic efficiency enhancement and outputs a too small CSD. Therefore, our results are enough for safety guarantee and could increase traffic throughput to some extent. Besides, the CSD by our model decreases with the falling of acceleration of the back car, that is,
A is decelerating and its initial speed is less than B's.

A is decelerating and its initial speed is greater than B's.
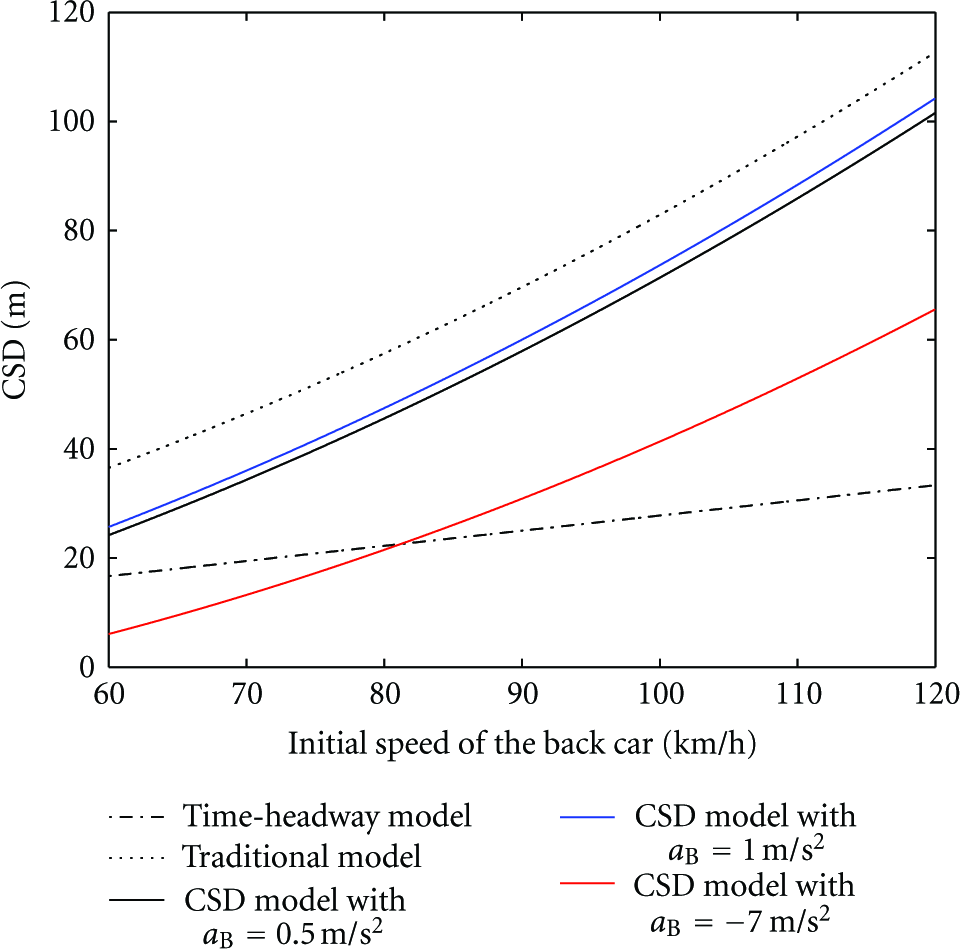
The case that the leading car has an initial speed less than that of the rear car is plotted in Figure 12 with
In Figure 13, we also show the CSD performance comparison among the three models in multi-lane case. Here, we assume the speeds of the leading and rear car are both constant during simulation. Besides, due to the small steering angle as θ shown in Figure 8, we can overlook the vehicle's velocity vertical component and suppose its speed is still the same during lane changing [21]. The speed of the leading car is

Multilane CSD.
9. Conclusion
In this paper, we define a Critical Safe Distance to balance the requirement between vehicle driving safety and traffic efficiency in VSNs. To accurate express this CSD, we elaborately analyze the movement features when braking and discuss its possible value in different mobility scenarios. Numerical results show that our proposed model could intelligently set the CSD according to the relative movement status of the leading and following vehicles in single and multi-lane cases. Further, our algorithm can better alleviate the performance degradation on safety and traffic throughput due to bigger or smaller safe distance settings by the time-headway and the introduced traditional braking models.
Footnotes
Acknowledgments
This work was supported by the National Natural Science Foundation of China (61201133; 61172055; 60832005; U0835004; 61072067, 50978030, and 51278058), the Postdoctoral Science Foundation of China (20100481323), the Program for New Century Excellent Talents (NCET-11-0691), the “111 Project” of China (B08038), and the Foundation of Guangxi Key Lab of Wireless Wideband Communication and Signal Processing (11105).