
Abstract
As an important component of transportation system, public transportation accounts for a considerable proportion in the whole traffic flow. The public transportation vehicles can be categorized into two categories as follows: one with determinate trajectories and schedules such as bus, tramway, and light rail; the other with flexible and variable running paths, such as taxis. In this paper, we firstly present a destination-gathering-based driving path prediction method for taxis, which can make taxis' driving paths prescient in the initial stage of carrying passengers every time. Compared with ordinary vehicles, public transportation vehicles have such features as long time running on roads and no privacy-protection need, and thus their trajectories can be opened. Through utilizing the features above, we propose a novel public-transportation-assisted data delivery scheme (PTDD) used to improve the performance of data delivery of Vehicular Delay Tolerant Networks (VDTNs). Simulation results based on a real map demonstrate the effectiveness of the proposed scheme.
1. Introduction
With the rapid development of wireless communication technology, new types of wireless networks and applications are appearing constantly. In this context, vehicular networks have gradually become an important research field in wireless communication and received broad attention from both industry and academy [1, 2]. As vehicle nodes' high speed mobility and uneven distribution, vehicular networks have dynamic and changing network topology, which make it difficult to maintain persistent connection among vehicle nodes. To improve data delivery performance, vehicular networks widely adopt Delay Tolerant Networking (DTN) technology, and thus Vehicular Delay Tolerant Networks (VDTNs) emerges. VDTNs have evolved from DTNs and are formed by cars and any supporting fixed nodes.
As an important component of Intelligent Transportation Systems (ITS) [3], VDTNs promise a wide range of valuable applications including real time traffic estimation for trip planning, mobile access to Internet, and in-time dissemination of emergency information such as accidents and pavement collapses. To realize the applications above, one of key research topics is to design effective and efficient data delivery schemes. Therefore, many schemes have been presented to solve the problem in recent years. Among the existing schemes, some works mainly take advantage of geographic position information, such as GPSR [4] and CAR [5]. The performances of these protocols mainly depend on the network connectivity, and they are sensitive to the vehicle node density. Many works are based on the traffic statistics and network layout, such as SADV [6] and VADD [7]. A few protocols such as TBD [8], TSF [9], and STDFS [10] are designed to utilize available vehicle trajectories to improve the data delivery performance. To disseminate vehicle trajectory information, there protocols assume that numerous wireless access points (APs) need to be deployed along roads. That will undoubtedly request a large amount of investment. Some researchers have made explorations on the prediction of vehicle driving paths and make use of the character of anticipating vehicle routes to develop data delivery schemes. In literature [11–14], several prediction model and scheme are proposed. However, these works are based on either historic driving records or local and current vehicle running status, and thus there are prediction accurate problems.
Public transportation is an important component of transportation system and accounts for considerable proportion in the whole traffic flow. For Beijing, public transportation occupies about 31.5% shares of the traffic flow [15, 16]. In general, the vehicles can be categorized to two types: (i) bus, tramway, and light rail, which have stable trajectories and schedules; (ii) taxi, which has flexible and variable running paths. In this paper, we firstly suggest a driving path prediction method based destination gathering for taxis, which can make taxis' driving paths prescient in the initial stage of carrying passengers every time. Comparing with general vehicles, public transportation vehicles have such features as long time running on roads, no privacy-protection need, and thus their trajectories can been opened for the public. Based on the character, we propose a novel public-transportation-assisted data delivery scheme (PTDD), which can increase data delivery ratio through (i) carrying messages by vehicles whose driving paths will pass through the messages' destination; (ii) increasing chance to find the vehicles that move toward the optimal expected road in intersection areas. The major contributions of this work may be listed as follows.
A new method based on destination information gathering is proposed to predict the driving paths of taxis. The method takes the effect of destination information on prediction process into account, and thus the prediction accuracy and reliability is improved. We propose a novel data delivery scheme called PTDD to improve the data forwarding performance of VDTNs, which effectively takes advantage of the characteristics of public transportation traffic such as foregone driving path, long time running on roads, no privacy-protection need. Through extensive simulations, the effectiveness of our proposed PTDD scheme is evaluated.
The rest of the paper is organized as follows: Section 2 summarizes the related works for vehicular networking. In Section 3, we present a driving path prediction method based on destination gathering for taxis. In Section 4, we describe the design of our proposed PTDD scheme in detail. Section 5 shows the effectiveness of PTDD via simulation experiments. Section 6 concludes the paper.
2. Related Works
In recent years, data delivery and forwarding issues about vehicle-to-vehicle and vehicle-to-infrastructure in VANET have gained lots of attentions [1, 2, 5–8]. For the frequent network partition and mergence due to the high mobility of vehicles, the physically constrained nodal mobility resulted from the fixed roadways and the constrained nodal moving speed limited by the roadway conditions, the data forwarding in VANET is different from that in the traditional mobile adhoc networks (MANETs). These unique characteristics of the road networks make the MANET routing protocols ineffective in the VANET settings [17]. Thus, many routing protocols based on carry-and-forward thinking have being proposed in order to reach efficient and effective data forward performance in VDTNs.
Among these works, Epidemic [18] is an early approach to deal with the data forward issue in frequent network partition and mergence settings. It allows the random pair wise exchange of data packets among mobile nodes in order to maximize the possibility that data packets can be delivered to their destination node. Thus, a great number of copies of data packets are generated during the delivery, which weakens its performance to a great extent, especially when the resources of bandwidth and buffer are limited.
Some works mainly take advantage of geographic position information, such as GPSR [4], CAR [5], MMR [17], and VVR [19]. Similar to GPSR, both MMR and VVR use greedy forwarding strategy to find the next packet carrier based on the geographical proximity toward the packet destination. Through using the approach of “guard node,” CAR forwards data packets through the connected path from the packet source to the packet destination. The performances of these protocols mainly depend on the network connectivity, and they are sensitive to the vehicle node density. Thus the geographic position based routing schemes cannot work well when the vehicular traffic is sparse and none-uniform-distribution.
Some works are based on the traffic statistics and network layout, such as SADV [6], VADD [7], and DBR [3]. SADV routing leverages on the stationary nodes to improve the network connectivity and the data forward performance. Through using a stochastic model based on vehicular traffic statistics, VADD tries to achieve as high delivery successful ratio as possible with low delivery delay from mobile vehicles to stationary packet destinations. DBR scheme focus on satisfying the user-defined delay bound rather than the lowest delivery delay, so that it can economize resource such as channel utilization and buffer space.
A few protocols such as TBD [8], TSF [9], and STDFS [10] are designed to utilize available vehicle trajectories to improve the data delivery performance. TBD utilizes the vehicle trajectory information along with vehicular traffic statistics in order to compute the accurate expected delivery delay for better forwarding decision making. However, to disseminate vehicle trajectory information, these protocols assume that numerous wireless access points (APs) need to be deployed along roads. That will undoubtedly request a large amount of investment.
Some researchers have made explorations on the prediction of vehicle driving paths, and take use of the character of anticipating vehicle routes to develop data delivery schemes. Several prediction model and scheme are proposed such as PBR [11], MOPR [12], PLR [13]. PBR exploits the location and velocity information of vehicles to predict route lifetime, and takes preemptive action to minimize route failure. MOPR improves the routing process by selecting the most stable route in terms of lifetime. PLR uses a location predictor to solve the problem of location inaccuracy and vehicle mobility. In [14], Jeung et al. propose a network mobility model to predict the driving paths of vehicles. However, these works are based on either historic driving records or local and current vehicle running status, and thus there are prediction accurate problems. Moreover, the approaches mainly focus on short-term and short-distance prediction, and do not take into account how long-distance driving path prediction information is used to improve the data forwarding in VDTNs.
3. Driving Path Prediction for Taxis
In this section, we will firstly introduce the driving path prediction method for taxis based on destination information gathering. For our proposed driving path prediction method for taxis is a new thinking in the research of VDTNs, and thus we will discuss the feasibility and practicability of the prediction method.
3.1. Destination Information Gathering for Taxis
When a passenger takes on a taxi, the first sentence from the driver is always: “Hi, where are you going?” Naturally, the driving destination of the taxi can be caught from the answer of the passenger through phonetic recognition devices. This may be the most convenient way. Of course, other candidate input approaches include handwriting board, keyboard, touch panel, and so on.
3.2. Driving Path Prediction Method
According to taxi operation rule, the main approach of increasing revenues is to increase the carrying passenger times per day. So taxi drivers will always choose the paths with the shortest driving time to take passengers to their destinations as soon as possible. Based on the gathered destination information, GPS device, electronic map, and traffic statistic information at different times, a practicable prediction method is to utilize Dijkstra algorithm to look for the lowest cost path from the current position to the destination, where the cost means the average travel time for each road segment.
To improve prediction accuracy further, we will take advantage of the features that taxi drivers are relatively fixed and familiar with the road and traffic conditions. Through recording the drives' historical route and personal preferences at different times on each taxi, the prediction path can be adjusted and more consistent with the real situation.
3.3. Feasibility and Practicability
As to the approach of destination information gathering for taxis, there is no technology and cost problem because whether phonetic recognition or handwriting board, keyboard, touch panel are all very mature and reliable technology. The difficulty is to create an incentive measure that can prompt taxis drivers to carry out the information gathering activities. To solve the problem, the corresponding accounting mechanism is necessary, and senders or receivers should pay a fee to drivers for messages' success delivery.
When vehicle routes can be accurately predict and broadcast to neighbor vehicles in hello messages, that will bring benefits as follows: (a) increasing data delivery success ratio through carrying messages to their destinations by vehicles whose driving paths will pass the messages' destination; (b) increasing success ratio to find the vehicles that move toward the optimal expected road in intersection areas; (c) reducing wireless channel resources occupancy, and thus lessening wireless collision possibility and improve the quality of channel, which in turn can improve the delivery success rate.
4. Public-Transportation-Assisted Data Deliver Scheme
Through utilizing the proposed destination gathering based driving path prediction method in Section 2 each taxi can know its driving path in advance. Therefore, all public transportation vehicles, whether bus, tramway, light rail, or taxi, have such similar character, that is, their driving trajectories are of foreknowledge. Based on this character, we propose a new data delivery scheme called PTDD to improve the data delivery performance in VDTNs. In Figure 1, the sketch map of PTDD thinking is given out. In the rest of this section, our proposed PTDD will be described in detail.
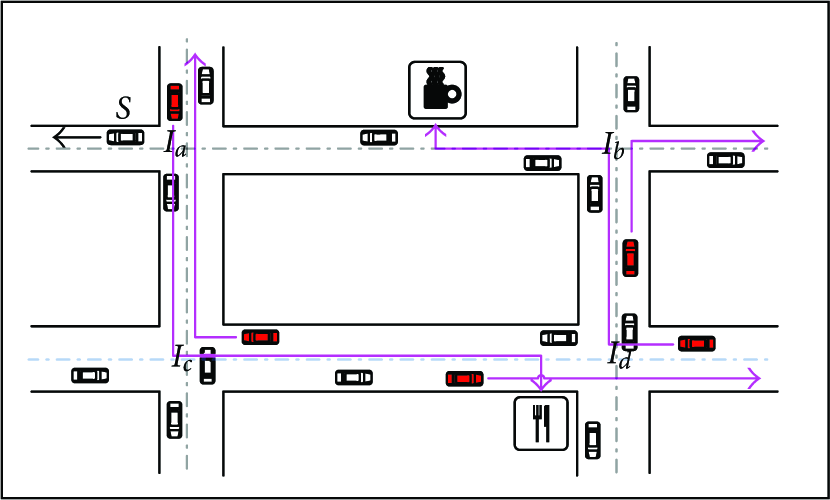
A sketch map of PTDD thinking.
4.1. Assumption
Every vehicle can obtain its current location through GPS device, and be equipped with a preloaded street-level digital map, which not only describes road topology (see Figure 4) and traffic light period but also provides traffic statistics such as traffic density and average vehicle speed on roads at different times of the day. Such kind of digital map has already been commercialized [20], and more detailed traffic statistics will be integrated into digital map in the near future. Vehicles communicate with each other through short range wireless channel, and can find their neighbors through beacon messages. Each beacon provides vehicle's information such as its unique id, location, velocity, direction. What is more, each public transportation vehicle will announce its driving paths in beacon message.
4.2. Data Delivery for Ordinary Vehicles
In VDTNs, a vehicle needs to send messages in three cases as follows: (a) the vehicle itself produces messages; (b) it forwards the message what it received from other vehicles; (c) it periodically takes from its routing buffer to send. When an ordinary vehicle

Message forwarding process for ordinary vehicles.
Case 1.
Both Nexthop and Dest_accord are found and different: the current vehicle
Case 2.
Only one among Nexthop and Dest_accord is found, or Nexthop is equivalent to Dest_accord:
Case 3.
Neither Nexthop or Dest_accord is found: this means that
4.3. Data Delivery for Public Transportation Vehicles
When a public transportation vehicle

Message forwarding process for public transportation vehicles.
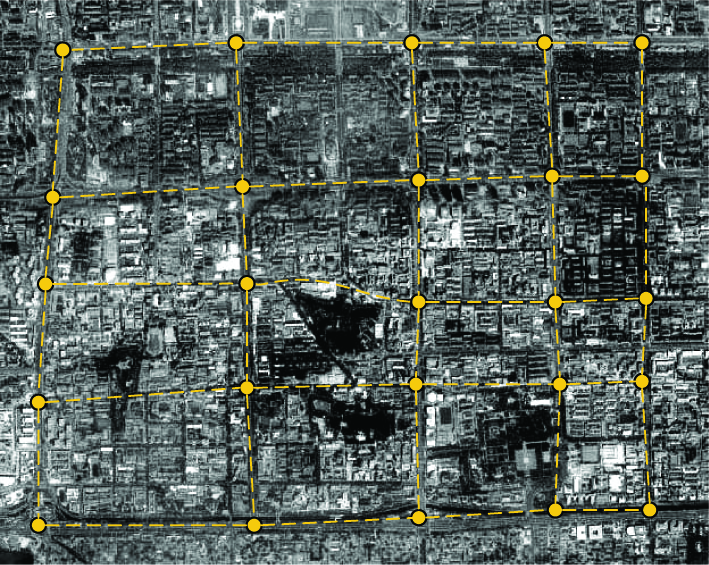
Road topology used in the simulation.
Step 1.
Firstly,
Step 2.
The current public transportation vehicle
Step 3.
Vehicle
When receiving a message from another vehicle, the current firstly checks whether it has keep a copy of the message in the routing queue. If so, it directly drops the message; else puts the message into its queue.
4.4. Queue Management Algorithm
For each mobile vehicle node in VDTNs, the size of its routing buffer queue is limited. Therefore, the queue management algorithm would greatly influence the data delivery performance. In the proposed PTDD, the flag_copy of a message indicates how many copies have been propagated, and the survival time shows how long a certain message has existed in the network. Therefore the flag_copy and survival time together denote the importance of a message, and the queue management is just based on the two parameters.
Messages are sorted in the routing queue based on a increasing order of their flag_copy. For those messages with the same flag_copy value, they are further sorted according to an increasing order of survival time. Thus messages with smaller tickets and shorter survival time are closer to the top of the queue, and can be transmitted with higher priorities. Moreover, messages will be dropped in the following two occasions: (a) when a message arrives and the queue is full, it is compared with that message at the end of the queue, and the one with bigger flag_copy is dropped among them. If the flag_copy values of the two messages are equal, then the one with a longer survival time is dropped; (b) whenever on, e message's survival time is longer than the delay tolerance of the network, it is dropped to avoid unnecessary resource occupation.
5. Performance Evaluations
In this section, we will evaluate the impact of the proposed PTDD scheme on the data transmission performance in VDTNs. We choose the classic wireless ad hoc network routing algorithm GPSR [4] as the referential. Since pure GPSR has no carry-and-forward ability, which will result in very poor performance in intermittently connected VDTNs, so that we extend it by adding buffers to make it have basic carry-and-forward ability. In the following simulation experiments, the data delivery performances of GPSR with simple carry-and-forward ability, denoted as GPSR (with buffer), and GPSR supported with PTDD scheme, denoted as PTDD (based on GPSR), will be analyzed and evaluated in terms of data delivery successful ratio and delivery delay.
5.1. Simulation Setting
As shown in Figure 3, the experiment is based on a
Simulation parameters.

5.2. The Impact of Public Trasportaion Vehicle Proportion on Performance
Figure 5 shows the impact of public transportation vehicle proportion on data delivery performance as to PTDD (based on GPSR), where the data sending ratio is 0.1 packet/s, the total number of simulation vehicles is 100 and 200, respectively, and the average vehicle driving speed varies from 40 to 80 km which depends on road speed limit, vehicle density, and influence of traffic lights. From this figure, we can see that the data delivery ratio remarkably goes up with the proportion of public transportation vehicles increasing from 0 to 30% accounting for the whole vehicle number under the two cases of 100 and 200 simulation vehicles. This demonstrates that the bigger proportion the public transportation vehicles accounts for, the better performance PTDD scheme will reach. For the status that the vehicle total number is 100, the data delivery ratio is improved from 46 to 83% (the relative growth rate is 80.4%) as the proportion of public transportation increases from 0 to 30%. As to the status that the simulation vehicle number is 200, the data delivery ratio goes up from 55 to 89% (the relative growth rate is 61.8%) under the same growth proportion of public transportation. This reflects that the performance of DPPR scheme is improved more obviously in low vehicle density and sparse connection environment.

Impact of public transportation vehicle proportion on performance.
5.3. The Data Deliver Ratio
To evaluate the performance of PTDD scheme, we compare the data delivery ratios of the two schemes, that is, GPSR (with buffer) and PTDD (based on GPSR), under different data sending rates. Here, the public transportation accounts for the total vehicles is fixed as 20%, and the CBR data sending rates is changed from 0.1 to 1 packet/s.
As shown in Figure 6, the data delivery ratio of PTDD (based on GPSR) is greatly higher than that of GPSR (with buffer) under the different data sending ratios, when the simulation vehicle number is 100. The average delivery ratio of PTDD (based on GPSR) reaches 0.74, which is far above that of GPSR (with buffer), that is, 0.43, and the relative growth rate is 72%.

Data delivery ratio (100 vehicles).
In Figure 7 we can see the data delivery ratio of PTDD (based on GPSR) is also much higher than that of GPSR (with buffer) under all data sending ratios, when the vehicle number is 200. The average delivery ratio of PTDD reaches 0.82, which is far above that of GPSR, that is, 0.51, and the relative increase rate is 61%. The results show that PTDD thinking can play an important role in vehicular network environments with such features as high mobility, low vehicle density, sparse connection.

Data delivery ratio (200 vehicles).
5.4. The Data Delivery Delay
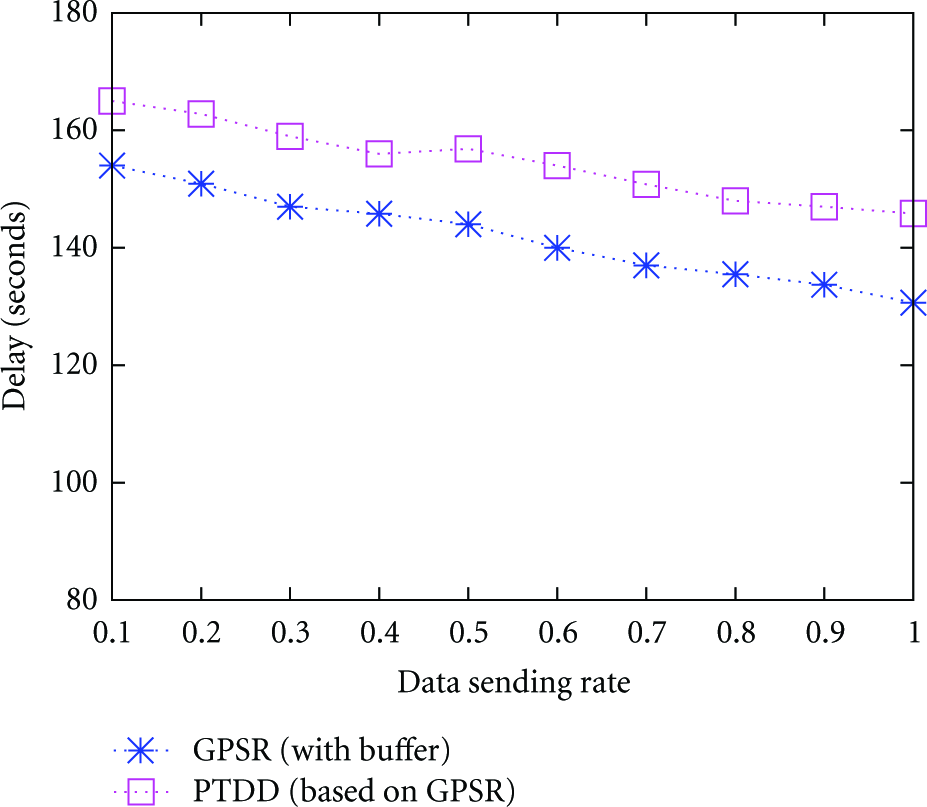
From Figure 8, it can be seen that the data delivery delay in the two schemes, that is, PTDD (based on GPSR) and GPSR (with buffer), goes down with the increasing of the data sending rate in the case of 100 simulation vehicles. The reason is that the part of messages with too long survival time are dropped because the size of routing buffer is limited, when the increasing data sending rate results in the fast increase of transmission overhead.
Data delivery delay (100 vehicles).
From Figure 9, it can be seen that the data delivery delay goes down with the increasing of the data sending rate in the case of 200 simulation vehicles. But the delay decrease speeds of PTDD and GPSR are different as the data sending rate increases, and PTDD shows a sharper decrease trend. The reason is that PTDD is a multiple copy scheme and it generates more data packet copies the GPSR, especially for the case of high vehicle density.

Data delivery delay (200 vehicles).
From Figures 8 and 9, we also notice the delivery delay of PTDD (based on GPSR) is longer than that of GPSR (with buffer). The reason is that there are many data messages which cannot find proper next hop to delivery and thus are dropped in GPSR routing, but in PTDD scheme the messages are likely to be successfully delivered by public transportation vehicles with carrying way when the public transportation vehicles pass through the messages' destinations. To better study the delivery delay, we only examine the “the lowest 75% delivery delay,” which is the average delay of the lowest 75% packets according to the method proposed in literature [7]. As shown in Figure 10, the delivery delay of PTDD (based GPSR) scheme is clearly lower than that of GPSR (with buffer) in the case of 100 simulation vehicles. In Figure 11, the similar results also can be seen, that is the delivery delay of PTDD scheme is lower than that of GPSR when the vehicle number is 200.

The lowest 75% data delivery delay (100 vehicles).

The lowest 75% data delivery delay (200 vehicles).
6. Conclusion
As an important constituent part of traffic system, public transportation vehicles have the features such as long running time, no privacy protection request. We think it is important and interesting research topic to effectively utilize the features of public transportation vehicles to improve the data delivery performance in VDTNs. In this paper, we firstly present a taxi driving path prediction method based destination information gathering. By doing, public transportation vehicles can foresee their driving paths. Through utilizing the features, we propose a new data delivery scheme call PTDD to improve the performance of data delivery of Vehicular Delay Tolerant Networks. Through simulation experiments, we analyze and evaluate the performance of GPSR (with buffer) and PTDD (based on GPSR) scheme. The experiment result shows that PTDD scheme can significantly improve the data delivery performance in VDTNs.
Footnotes
Acknowledgments
This work is supported by the National Natural Science Foundation of China under Grant no. 61262081; the Yunnan Provincial Applied Fundamental Research Project under Grant no. KKSY201203027.