
Abstract
Virtual physics based approach is one of the major solutions for self-deployment in mobile sensor networks with stochastic distribution of nodes. To overcome the connectivity maintenance and nodes stacking problems in the traditional virtual force algorithm (VFA), an extended virtual force-based approach is investigated to achieve the ideal deployment. In low-
1. Introduction
Wireless sensor networks can be deployed manually or spread randomly over the interested regions for practical applications [1–3]. However, in many working environments, such as remote harsh fields, disaster areas, and toxic gas regions, it is almost impossible to deploy sensors by human beings. In such case, deploying the sensor nodes randomly may not satisfy the requirement of precise placement. Sensor nodes may cluster for stacking in a small region or may distribute sparsely without connectivity guarantee.
A mobile sensor network is composed of a distributed collection of nodes, each of which has communication, sensing, computation, and locomotion capabilities. Mobility of sensor nodes allows more complex application scenarios. With locomotion capabilities, sensor nodes can adjust their positions after stochastic distribution, thus enhancing the coverage and reaching more precise placement.
Many efforts have been put on the algorithms of repositioning sensors in order to obtain a required placement and improve the coverage rate. Previous work on self-deployment issue of mobile sensor networks can be classified into two categories: virtual physics-based approach and computational geometry-based approach. In terms of virtual physics-based strategy [4–7], it models the mobile sensor nodes as the electrons or molecules, and nodes move toward or away each other by their virtual forces or potential fields. However, except the factor of oscillation moving, it does not consider any more crucial problems such as connectivity maintenance and topology control [8, 9]. According to the computational geometry-based approach [10–13], nodes adjust their positions in order to construct a uniform Voronoi diagram or Delaunay triangulation. Nevertheless, decentralized algorithm is too hard to realize because global position information of network should be provided in establishing the Voronoi diagram or Delaunay triangulation.
In this paper, the stability and formation of self-deployment by virtual physic based methods is analyzed. More precisely, the connectivity maintenance problem caused by few neighbors and nodes stacking problem by nonplanar connectivity graph in the existing VFA algorithms are discussed. This paper aims to solve the above problem by introducing an extended virtual force-based approach that can achieve the ideal deployment after self-deployment. The extended virtual force approach can be applied in the mobile sensor networks with different ratio value of communication range and sensing range. In low-
The rest of this paper is organized as follows. Section 2 summarizes the related work. Section 3 describes fundamental model of network, ideal deployment, and virtual force approach. In Section 4, the analysis of stability and formation of self-deployment in mobile sensor networks is given. Our proposed extended virtual force approach is introduced in Section 5. Simulation results that illustrate the performance are shown in Section 6. Finally, Section 7 concludes the paper.
2. Related Work
There exists prior works on self-deploying mobile sensor nodes in recent years. Specifically, those closely related to our filed are summarized below.
The concept of self-deployment in mobile sensor networks is derived from dealing with coordination in behavior control of many robots teams [14–16]. Gage [14] has investigated the use of robot swarms to provide blanket, barrier, or sweep coverage of area. According to this taxonomy, the deployment problem of this paper focuses on the blanket coverage. Simmons et al. [15] have calculated desired deployment locations by attempting to minimize overlap in information gain. Blach and Hybinette [16] have suggested the leverage of “attachment sites” that mimic the geometry of crystals. However, most of the behavior based control approaches are centralized and may not perform well on large-scale networks.
In self-deployment approaches, most of strategies are based on the virtual physics. Howard et al. [4] have presented a potential-field-based approach to spread sensor nodes in a target environment. Control force is defined as the negative gradient of the potential. This approach models robots as like electric charges in order to cause uniform deployment into an unknown enclosed area. VFA [5] works in a similar fashion with potential-field-based algorithm. It increases sensor coverage by considering the virtual attractive and repulsive forces exerted on each sensor node by neighbor nodes and obstacles. Heo and Varshney [6] have developed a distributed self-spreading algorithm (DSSA). The force models in DSSA are similar to internuclear repulsion and attraction between molecules. There are also some flaws in these virtual force based self-deployment algorithms. First, they have not considered the connectivity maintenance on the processing of adjusting positions. Moreover, all of these models use fully connected graphs or unit disk graph (UDG), there is a possibility that nonplanar graph may cause significant stacking of sensor nodes [8].
Improved virtual force algorithm (IVFA) and exponential virtual force algorithm (EVFA) [17] have improved traditional VFA to some extent. IVFA sets a maximum movement per iteration in order to prevent nodes from moving out of the region of interest, and incorporates an effective communications distance measure into the force equations to assist the wireless sensor network in reaching a steady state. EVFA provides an exponential force model so that achieve steady state more quickly in mobile sensor networks with a large communication range. However, discontinuous connectivity and coverage holes may appear in IVFA and EVFA because they only assume the effective communication distance is twice as long as the sensing range.
Connectivity-preserved virtual force (CPVF) scheme [18] considers the connectivity preserving by having disconnected sensors move toward the base station to establish connectivity. But CPVF does not conceal the drawback of stacking in large communication range. Self-deployment by density control (SDDC) is presented in [7]. In SDDC, virtual force is decided by density at a sensor node and obstacles. Although compact initial deployment can be spread out, and the stacking problem can be solved, it does not perform well in sparse initial distribution. Distributed robotic macrosensor (DRM) algorithm [8] by virtual spring force control eliminates stacking. The mesh is decidedly planar without intersection of edges by acute-angle test. Extend virtual spring mesh algorithms (EVSM) [19] extends the DRM algorithm with several enhancements such as exploration of unknown areas and obstacle avoidance. In fact, the topology by acute-angle test mesh is Gabriel Graph (GG). However, sensor nodes can only get information from its logical neighbor nodes through GG edges, the uniformity of GG is worse than regular hexagonal deployment structure. Lam and Liu [9] have proposed a self-deployment algorithm named ISOGRID. In ISOGRID, virtual force only exerts on each sensor node by its six closet neighbor nodes, and each node try to move to the vertex of its neighbor nodes' hexagonal placement structure. Though ISOGRID performs very well when the communication range
Another commonly used self-deployment approach relies on the use of computational geometry such as Voronoi diagram and Delaunay triangulation. Wang et al. [11] have presented three independent algorithms: the vector-based algorithm (VEC), the Voronoi-based algorithm (VOR), and MiniMax. These algorithms use Voronoi diagrams to partition the coverage field into many subareas and maximize the coverage via pushing or pulling nodes to cover the coverage gaps on virtual force. In computational geometry-based strategy, stacking can be limited. However, the Voronoi diagram is a global structure, in which all Voronoi vertices and cells can only be obtained when the global location information with all other nodes in the network is known.
3. Preliminaries
3.1. Network Model and Assumptions
This paper focuses on the self-deployment issue in 2-dimensional plane and leverages Euclidian plane
3.2. Ideal Deployment
The essential aim of self-deployment is to make the sensor nodes move from their original positions to new positions in order to form the ideal deployment layout. Optimal deployment patterns for k-coverage with l-connectivity maintenance have been studied [21–23]. Bai et al. [24] have improved k-coverage of mobile sensor networks using improve PSO algorithm. In this paper, we study the 1-coverage self-deployment problem. An ideal deployment grid structure for 1-coverage is show in Figure 1. Equilateral triangle grid (hexagonal placement structure) has the smallest overlapping area, hence this deployment requires the least number of sensors for area full coverage [25]. There is no coverage “hole” exists in an ideal deployment sensor network. The ideal distance

Ideal deployment for full coverage.
3.3. Virtual Force-Based Approach
All of the virtual physics approaches for self-deployment are similar with the framework of virtual force, which combines the ideas of potential field with circle packing [4] by modeling the sensor node to be a particle in the potential field. The potential field exerts forces on the nodes nearby. For node i and j, it is useful to write the force as the negative gradient of the potential field. We can construct a potential function

Sensor nodes move towards the required placement by these virtual forces. The force may be either attractive force or repulsive force. If two sensor nodes are placed closer than the threshold distance (ideal distance
The law of updating position exploits either step method by iteration [17] or sampling time method [8, 19]. Normally, both of these methods will achieve the same results. In this paper, we choose sampling time method for analyzing. The control law for each sensor node is
According to the traditional VFA, the force law is given as follows:
The sensor moves to its new position under the control law in (2). The total force

4. Analysis of Virtual Physics-Based Approach for Self-Deployment
4.1. Stability Analysis
Although small oscillation can be observed in the processing of self-deployment under virtual physics-based approach, all nodes will stop moving finally. In fact, there is always damping effect acting against the motion of each sensor node. It causes the reduction in kinetic energy. Potential energy is conservative because the drive force is defined as the negative gradient of it. Thus, the total energy cannot be increased, and kinetic energy must eventually approach to 0. We can proof the stability with Lyapunov stability theory.
Theorem 1.
In virtual force-based approach for self-deployment, any node will eventually converge to a steady state.
Proof.
Let


Figure 2 shows the variations of coordinate for movement from self-deployment by 3 nodes with initial positions of

Convergence of VFA for 3 nodes with sensing range 10 m.
Note that the domain of the Lyapunov function
4.2. Formation Analysis
The goal of self-deployment is to make the formation of placement as the ideal equilateral triangle grid. However, Chen et al. [17] and Shucker and Bennett [8] have noticed that attractive force always exists whenever the distance between two sensors is larger than threshold
Theorem 2.
In mobile sensor networks with ideal deployment, all virtual forces exerted on any pair of nodes are equal to 0.
Proof.
From Section 3.2, we know that the distance between each pair of nodes is larger than or equal to
We assume there are N sensor nodes in the network topology graph, and there are
For
We suppose there are



It is unstable. So, there are
As shown in Figure 3, in order to achieve the stable state of these

It is obvious that the network cannot reach the ideal deployment if there exists attractive force. Therefore, we conclude that all of the virtual forces across connectivity edges in the topology graph for ideal deployment are equal to 0.
Virtual force for each node should equal to 0.
Lemma 3.
If the connectivity graph of mobile sensor network is nonplanar, the network deployment cannot reach the ideal deployment.
Proof.
Figure 4 shows a nonplanar connectivity graph of sensor nodes
From Theorem 1, in an ideal deployment, all the connectivity graph edges should equal to ideal distance
So
Thus, the network deployment cannot reach the ideal deployment if there is (are) intersection(s) of edges in connectivity graph.

Nonplanar connectivity graph.
As shown in Figure 5, the connectivity graph of four nodes is nonplanar. Self-deployment by traditional VFA cannot reach the ideal deployment. In fact, the nonplanar graph exhibits more significant stacking under self-deployment if there are more intersections of connectivity edge. So in mobile sensor networks with a large value of

Nonplanar connectivity graph cannot reach ideal deployment.
In the following sections, we will make some improvements on virtual physics-based approach in order to solve the above-mentioned problems.
5. Extended Virtual Force Approach for Mobile Sensor Networks
The extended virtual force algorithm is a self-deployment scheme with some novel features which can overcome the drawbacks of traditional VFA. In mobile sensor networks with small value of
5.1. Low-
VFA
As shown in Figure 1, under the ideal deployment, the nonplanar connectivity graph can be formed, when


Force models.
The distance force can reduce the connectivity degree to be less than or equal to 6 if the initial connectivity degree is larger than 6. The orientation forces are only exerted on the nodes whose neighbors are less than 6. The aim of orientation force is tried to keep the angle formed by one node and its two adjoined neighbors equal to

Then, in low-

5.2. High-
VFA
We consider the mobile sensor network as a high-

In high-
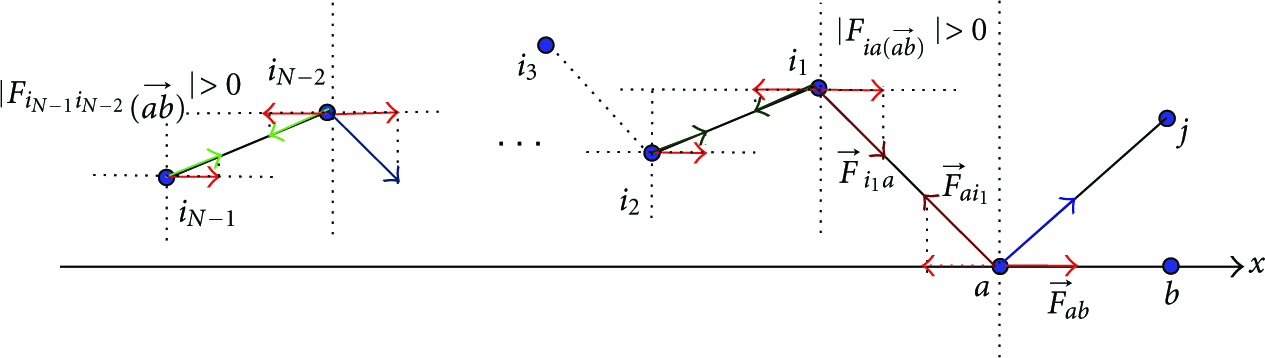
There always exist virtual attractive forces between nodes and its faraway neighbors in the traditional VFA. Therefore, stacking possibly occurs in high-
(1) (2) (3) (4) (5) (6) Find the neighbors which belong to both nodes satisfy (7) (8) (9) (10) (11) Compute the angle θ formed by node i, clockwise side of belongs to (12) (13) (14) (15) (16) (17) (18) (19)
As shown in Figure 7,

Virtual force between node and its faraway node.
Both in low-
5.3. Performance Evaluation
5.3.1. Coverage Rate
The coverage rate is a measure of the coverage quality for sensor networks. It was originally introduced by Gage [14]. In blanket coverage problem, coverage is defined by the ratio of the union of covered areas of each node to the complete area of interest. In this paper, the covered area of each node is defined as the circular area with sensing range

5.3.2. Uniformity of Distance
Under the ideal deployment of sensor nodes, the formation effectiveness of a deployment can be measured by distance uniformity and connectivity uniformity. Distance uniformity is defined as the average of the local standard deviation of the distances between neighboring nodes [6]:


5.3.3. Uniformity of Connectivity
Under the ideal deployment of sensor nodes, each node has the same number of neighbors except the boundary nodes. Uniformity of connectivity is defined as:

6. Simulation Results
In this section, we present simulation results for the extended virtual force approach including low-
6.1. Performance of Low-
VFA
Figure 8 shows the self-deployment results from stochastic initial distribution of 20 mobile sensor nodes in a

Self-deployment results in
Figure 9 shows the performance comparison of coverage rate among VFA, IVFA, and low-

Coverage rate comparison among VFA, IVFA, and low-

Uniformity comparison among VFA, IVFA, and low-
6.2. Performance of High-
VFA
Figure 11 shows the self-deployment from stochastic initial distribution in Figure 8(a), when
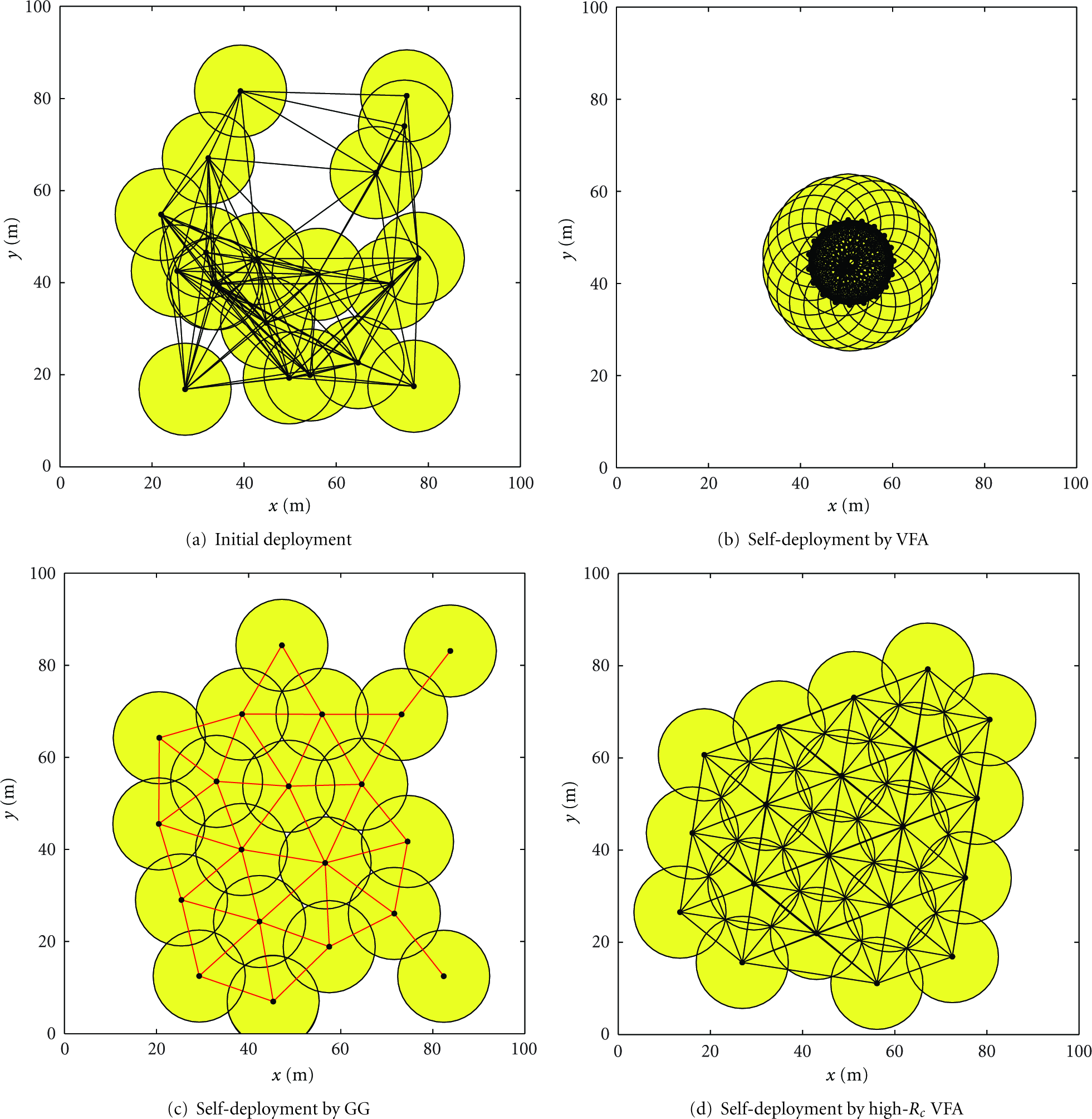
Self-deployment results in
Figure 11(a) is the initial deployment and its unit disk graph (UDG). It can be seen that more intersections of connectivity edges have been found compared to the network in Figure 8(a) due to the larger
In order to demonstrate self-deployment of large-scale mobile sensor networks, 100 mobile nodes are randomly placed for a concentrated deployment, as shown in Figure 12(a). The communication range is 40 m, while the sensing range is 10 m. The sampling time is 0.1 sec, and the damping coefficient
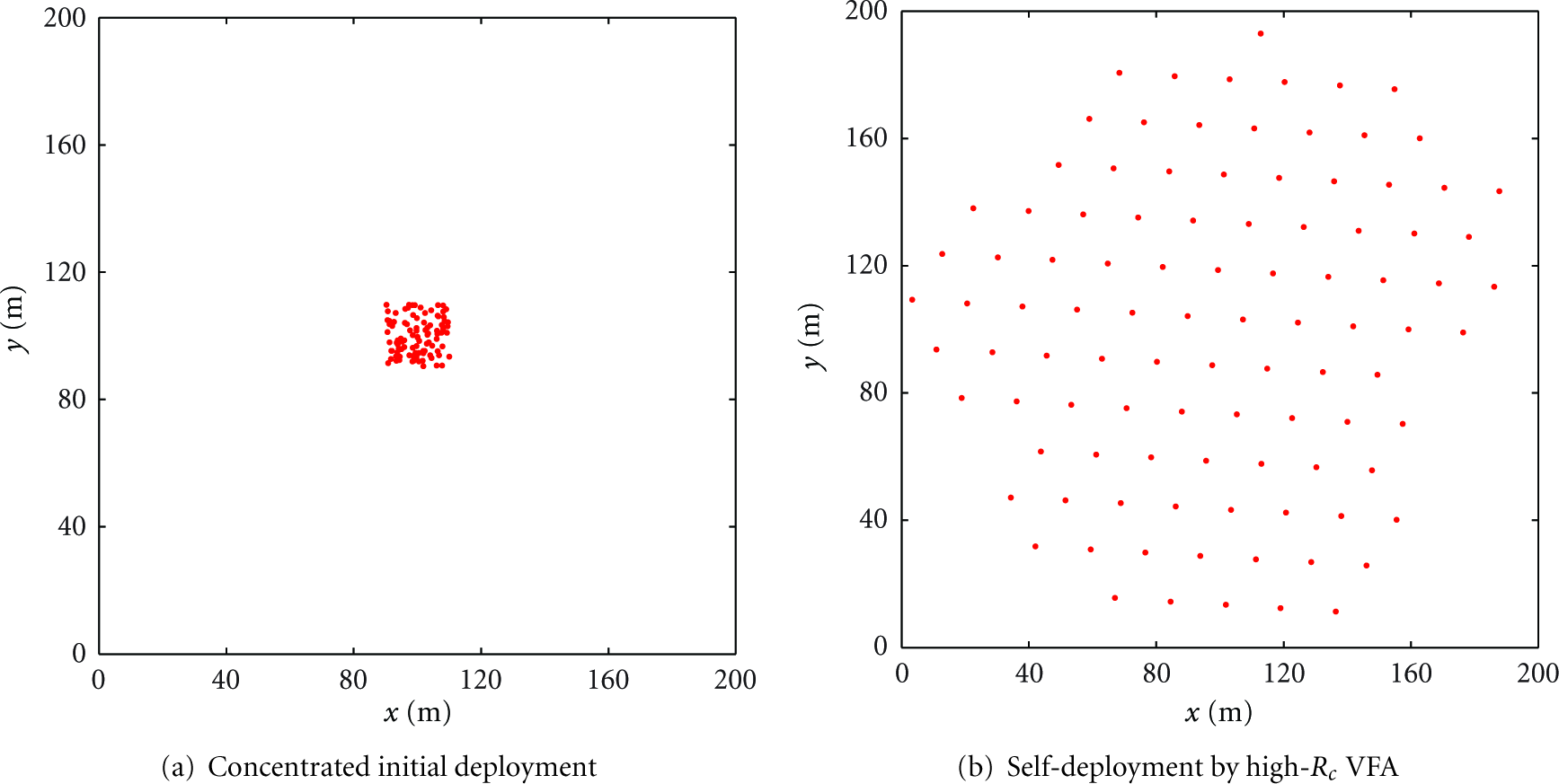
Self-deployment in large-scale concentrated deployment.
The impact of network size on self-deployment is shown in Figure 13. Figure 13(a) shows the change of distance uniformity with different nodes' numbers. In both IVFA and GG, distance uniformity deteriorates as the number of nodes is increased, while high-

Impact of nodes' number under IVFA, GG, and high-
6.3. Impact of Control Coefficients
The control coefficients influence the algorithm's performance. In the proposed extended virtual force-based approach, we focus on the sampling time and damping coefficient in this section. Equation (2) models the movement of self-deployment as a continuous system. Therefore, more accurate control can be obtained, when the sampling time becomes shorter. Figure 14(a) shows the distance uniformity comparison of different sampling time under high-

Impact of control coefficients and the nodes' number.
The damping coefficient also strongly influences self-deployment. Shucker and Bennett [8] has shown that convergence time increases when the damping coefficient is higher. We conduct simulations with damping coefficient of 0.3, 0.5, and 1 in this paper. As shown in Figure 14(b), the lower damping coefficient takes a faster moving at the beginning of self-deployment. However, it gets a higher value of distance uniformity with oscillation. It means that we should choose a higher damping coefficient to reach the more regular formation. Thus, we consider damping coefficient varying from 0.5 to 1 is reasonable value.
7. Conclusions
In this paper, we analyze the stability and formation of self-deployment with virtual physics-based methods. We argue the connectivity maintenance and nodes stacking problems of the existing VFA algorithms. To solve these problems, we proposed an extended virtual force-based approach which can achieve the ideal deployment under self-deployment and can be applied into networks with the different ratio of communication range to sensing range. In low-
Simulation results confirm the efficiency of the proposed extended virtual force approach in coverage rate, distance uniformity, and connectivity uniformity, respectively. In low-
Footnotes
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Grant no. 61104086), the National Defense Advanced Research Project of China (Grants nos. 104080, 40405020401), and Excellent Young Scholars Research Fund of Beijing Institute of Technology (Grant no. 2011CX04031).