
Abstract
Maximizing network lifetime is an important objective for the target-coverage problem. With practicable manufacture and cost reduction, directional sensor has been widely used in wireless sensor networks to save energy. In this paper, we address the target Q-coverage (TQC) problem to prolong the network lifetime with bounded service delay constraint in directional sensor networks. We propose a protocol to find a collection of coverage sets that satisfy the coverage quality requirement and the bounded service delay constraint, where the target in each coverage set may not be served continuously but can be served with tolerant service delay. By steering some sensors' directional antennas, our protocol could deal with the changes of network topology or monitoring tasks. Simulation results show that the performance of our protocol is close to the upper bound of the optimal solution.
1. Introduction
Wireless sensor networks (WSNs) could be applied to fire detection, battle field surveillance, environmental monitoring, and so on [1]. In these applications, one of the important tasks is to monitor a set of targets and collect the relevant data in the geographical region. Since sensor nodes are often deployed randomly, target coverage, which aims at covering the specified targets by a subset of the deployed sensor nodes, is a fundamental issue for target monitoring. In practical application, the importance of each target is often different, which requires various qualities of coverage. In other words, targets should be covered with different numbers of sensors to satisfy their QoS requirements, this is called target Q-coverage problem. Usually, sensor nodes use omnidirectional antennas to sense the targets. However, directional antennas can switch to a particular direction to transmit farther distances than omnidirectional antennas. With the manufacturing technology improvement and cost reduction, sensors with directional antennas are widely employed in many network models.
There have been a number of works on target coverage problem in directional sensor network [2–7]. Most of them assume that there are sufficient sensors deployed such that all targets always can be covered within the network lifetime. However, the assumption may not hold if some working sensors happen to fail or new targets need to be served. Thus, the previous coverage scheduling protocols may be not feasible in such flexible and scalable network environment. To solve the problem, the authors of [8] steer sensors periodically to serve more targets. Since targets may not be covered continuously, a protocol was proposed to minimize the maximum service delay, which determines how fast an interested message can be detected for a target. In their protocol, the network lifetime is not an optimization objective.
In this paper, we address the target Q-coverage problem with maximizing the network lifetime in directional sensor network and design a target coverage schedule to satisfy a bounded service delay. We suppose that at any time, each sensor serves for at most one sector to sense targets. Thus, all targets may not be covered simultaneously. The service delay is defined as the time interval from an event occurring to the event being detected. In target coverage problem, the service delay can be regarded as the tolerant maximal time duration of completing target coverage.
The target Q-coverage problem addressed in this paper is to construct a collection of coverage sets and schedule them to work alternately to prolong the network lifetime, which satisfies the target coverage requirement under given service delay bound
The rest of this paper is organized as follows. In Section 2, we briefly present the related works in the literature. Then, we introduce the TQC problem under a service delay bound and prove it is NP-hard in Section 3. In Section 4, we show the formulation of this problem, the upper bound of network lifetime and the definition of sensor weight. Moreover, we present the relationship between the service delay bound and the total sector numbers of a sensor. In Section 5, we propose a centralized protocol to solve this problem. The simulation results presented in Section 6 demonstrate the high performance of our protocols in prolonging the network lifetime. We conclude this paper in Section 7.
2. Related Works
Target coverage is a fundamental problem in wireless sensor networks for environment monitoring and surveillance purposes. To maximize the lifetime of a network, a large number of energy-efficient scheduling algorithms have been proposed for omnidirectional sensor networks [9–12]. These works study the 1-coverage, k-coverage, connected coverage, and multiattributes coverage. By organizing sensors into a number of subsets and elaborately managing the duty cycle of subsets in which some sensor nodes are scheduled to sleep or enter a power saving mode while the remaining active nodes keep working, significant energy savings can be achieved.
There are also many strategies to deal with target coverage problem for directional sensor networks [2–7]. The authors of [2] study the partial coverage with directional antenna and firstly propose the maximum coverage with minimum sensors (MCMSs) problem, in which coverage, in terms of the number of targets to be covered, is maximized whereas the number of sensors to be activated is minimized. The authors of [3] address the multiple directional cover sets (MDCSs) problem by organizing the directions of sensors into a group of nondisjoint cover sets to extend network lifetime. Wang et al. approximate network lifetime for target coverage scheduling problem by randomized approach and genetic algorithm, respectively [4, 6]. In [5], a weighted centralized greedy algorithm (WCGA) is proposed to improve the coverage rate for targets. In [7], the authors study the target-oriented scheduling in directional sensor networks, where each target has different coverage quality requirement based on the distance.
Since different targets may need different numbers of sensors to cover to satisfy the various sensing quality requirements, the target Q-coverage problem is first defined in [13], and a column generation-based approach is proposed. In [14, 15], a heuristic algorithm and an energy-efficient greedy algorithm are proposed to solve the target Q-coverage problem.
There are some existing works which study how to schedule sensors “on” and “off” in omnidirectional sensor network, such that each target may be covered within a bounded time interval and the sensors would not drain their energy too fast [16–18]. Cao et al. [16] propose a distributed protocol to schedule node sleeping which guarantees a bounded-delay sensing coverage while maximizing network lifetime. Gu et al. [17] propose a unified sensing coverage architecture (uSense) to address flexible and efficient target coverage problem by three novel ideas: asymmetric architecture, generic switching, and global scheduling. The authors in [18] present a sleep-wake sensor system based on cyclic cellular automata, which is verified to be highly effective in the case of frequent communication failures and sensor failures. Wang and Cao [8] consider the coverage problem in directional sensor network, where sensors are periodically steered to cover more targets. Since the targets may be not covered continuously, the authors propose a centralized protocol and a distributed protocol to minimize the maximum service delay, respectively. However, it does not take into account the network lifetime.
This paper is inspired by the above works and makes a tradeoff between coverage delay and network lifetime in traditional sensor networks. We focus on maximizing network lifetime for target Q-coverage problem with a bounded service delay constraint in directional sensor network.
3. Network Model and Problem Description
Given a directional sensor network with m targets
The tolerant service delay is the time interval from an event occurring at a target to the event being detected by a nearby sensor. It determines how fast an interested message can be detected for a target. In the target coverage problem, the service delay can be regarded as the tolerant time duration of completing a target coverage. In directional sensor network without considering the rotation delay, the service delay depends on two parameters: the number of sectors used by each sensor and the time duration of serving a sector at one time. We give an example to show the service delay in Figure 1, where the time duration of serving a sector at one time is set as 1. There are three full target coverage schedules as follows: (1)
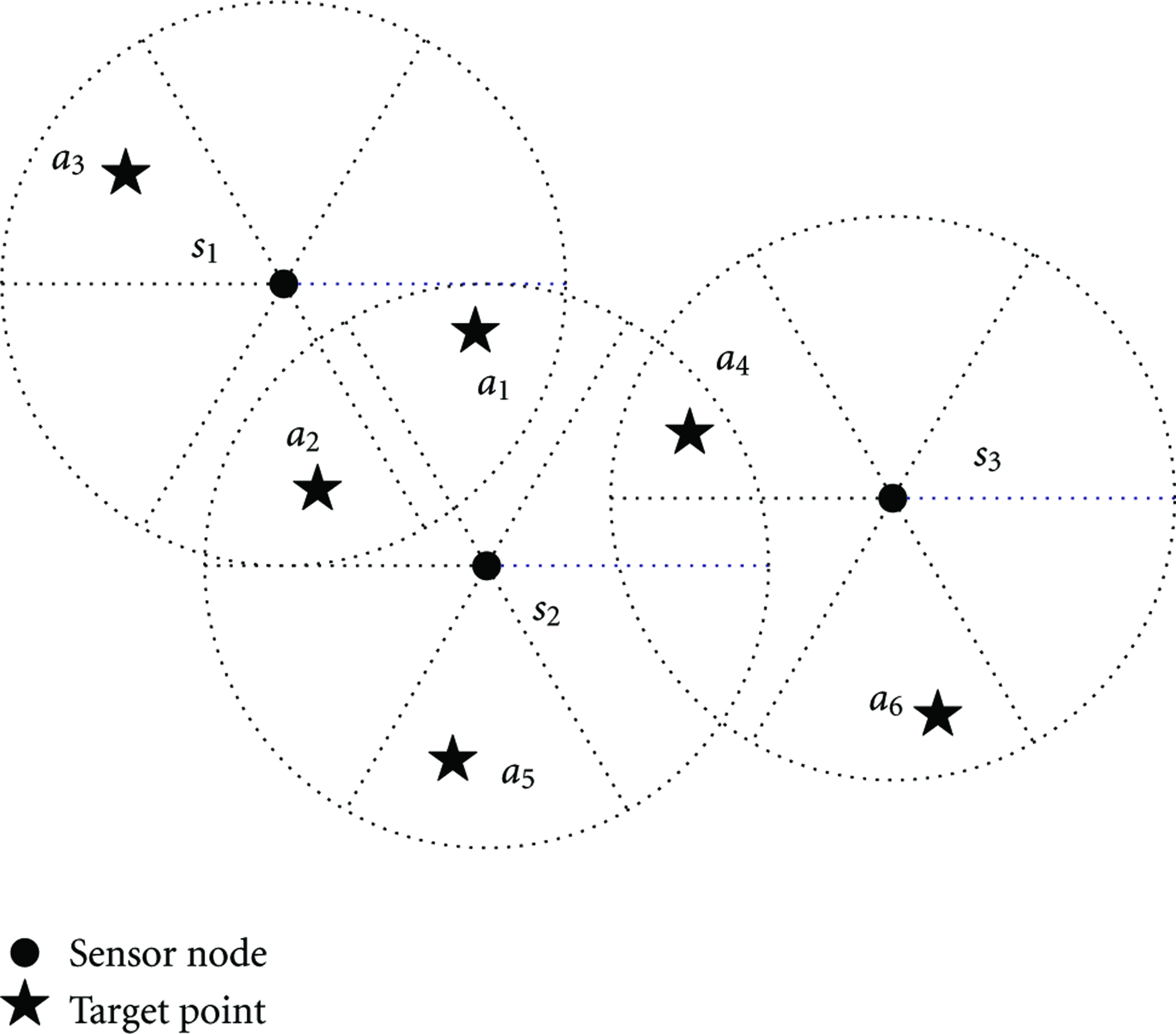
An example of service delay in directional sensor network.
We use
Suppose that each sensor has a unified lifetime E if a sensor serves for all the sectors simultaneously. Then if at any time a sensor serves only one sector, the lifetime of the sensor is
In the following, we show the definition of the target Q-coverage problem bounded with a service delay
Definition 1.
A subset D of sectors is called
Definition 2.
Bounded service delay for target Q-coverage (SDTQC) problem: given m targets and n sensors in an energy-constrained directional sensor network, where each sensor has p sectors,
Now, we show how to calculate the network lifetime. In Figure 1, each sensor has 6 sectors and we suppose the lifetime of each sensor is 2 if a sensor serves for the 6 sectors simultaneously. So if each sensor serves at most one sector at any time, the lifetime of each sensor is
Supposing the given service delay bound Suppose Suppose
Theorem 3.
The SDTQC problem is NP-hard.
Proof.
The multiple directional cover sets (MDCSs) problem [3] is a special case of the SDTQC problem. This is because when
4. The SDTQC Problem
In this section, we first formulate the SDTQC problem into a mixed integer programming problem. Secondly, we show the relationship of the given service delay bound and the number of the sectors used by each sensor in each coverage. Thirdly, we present the upper bound of the network lifetime for the SDTQC problem.
4.1. The Integer Programming Problem for the SDTQC Problem
Firstly, we describe the notations for the SDTQC problem as follows.
m: the number of targets in the network. n: the number of directional sensors in the network. K: the number of r: the sensing radius of sensor. p: the number of sectors for each sensor. The angle of sector is E: the initial lifetime of sensor if all its sectors are served together, so the lifetime of a sensor is A: the set of targets. S: the set of sensors. Q: targets' coverage requirement. Boolean variable
The SDTQC problem can be formulated to a mixed integer programming problem as follows:
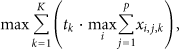
subject to
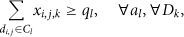


Remarks
Constraint (2) guarantees that each target
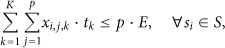
Constraint (3) guarantees that for each sensor, the sum of lifetimes costed in all
Constraint (4) indicates that for each
The objective function (1) is to maximize the sum of all
4.2. The Upper Bound of Network Lifetime
In this subsection, we present the upper bound of the SDTQC problem.
We know that the maximum lifetime of a sensor network is the smallest lifetime among all sensors. Since the time and the number of serving sectors of each sensor is uncertain, we consider the minimal time of serving each target in the network. Thus, the upper bound of network lifetime is as follows:

The maximal number of

Given a service delay bound
Then, all sensor's lifetime for covering target

Therefore, the upper bound of network lifetime of the target Q-coverage problem with the service delay bound
5. The Scheduling Protocol
In this section, we first present the sector weight. Secondly, we propose a centralized scheduling protocol based on the sector weight for the SDTQC problem.
5.1. The Sector Weight
In this subsection, we define the weight
Let
The contribution of a sector to network is defined as follows:



Thereby, the sector weight is presented as follows:

Now, as shown in Figure 2(a), we give an example that constructs target Q-coverage based on the sector weight.

An example of a network with 4 sensors and 9 targets, each sensor has 4 sectors.
There are 9 targets and 4 sensors, each of which has 4 sectors which are labeled in counterclockwise order and the first one begins with the X(positive)-axis shown in Figure 2(b). We discuss 3 sectors' weights: We compute the sector weights of We compute the sector weight of
5.2. A Centralized Scheduling Protocol with the Sector Weight
In the following, based on the sector weight, we propose a centralized scheduling protocol for the SDTQC problem: (the CSSW-SDTQC protocol). The main idea of the CSSW-SDTQC protocol for selecting a
The algorithm is formally represented as follows.
The input parameters for this algorithm is below: S is the set of sectors, A is the set of targets, E is the initial lifetime of a sensor, Q is the targets' coverage requirement, and the definitions of
(1) Let number from each sensor in the current (2) Set (3) (4) (5) Initialize the sector weight of each sector. (6) (7) Sort sectors in lifetime. If some sectors have the same value, give the priority to the sector with the maximal value of the sector weight. (8) Choose the first sector (9) (10) (11) (12) (13) (14) Update the sector wight of each sector. (15) (16) Minimize (17) Compute MAX_Lifetime( (18) (19) (20) (21) (22) (23) (24)
The centralized scheduling protocol returns k
6. Performance Evaluation
In this section, we will compare our algorithm (CSSW) with the upper bound (UB) of optimal solution in Section 4.2.
6.1. Simulation Setup
In our simulation, we deploy the sensor nodes and targets randomly in a region of 300 m
We evaluate the impact of the following three parameters on the performance of our algorithm: the number of sensors N, the number of targets M, and the sensing range of sensor R. The coverage requirement
6.2. Performance Comparison
Firstly, we test the impact of the number of sensors on our algorithm and the upper bound. We set the sensing range of each sensor (R) as 30, 30, 20, and the number of targets (

Network lifetime versus sensor number.
Secondly, we change the number of targets and compare the network lifetime of our algorithms with the upper bound. We set the sensing range of sensors (R) as 20, 20, and 30, and randomly deploy 200, 150, and 200 sensors (
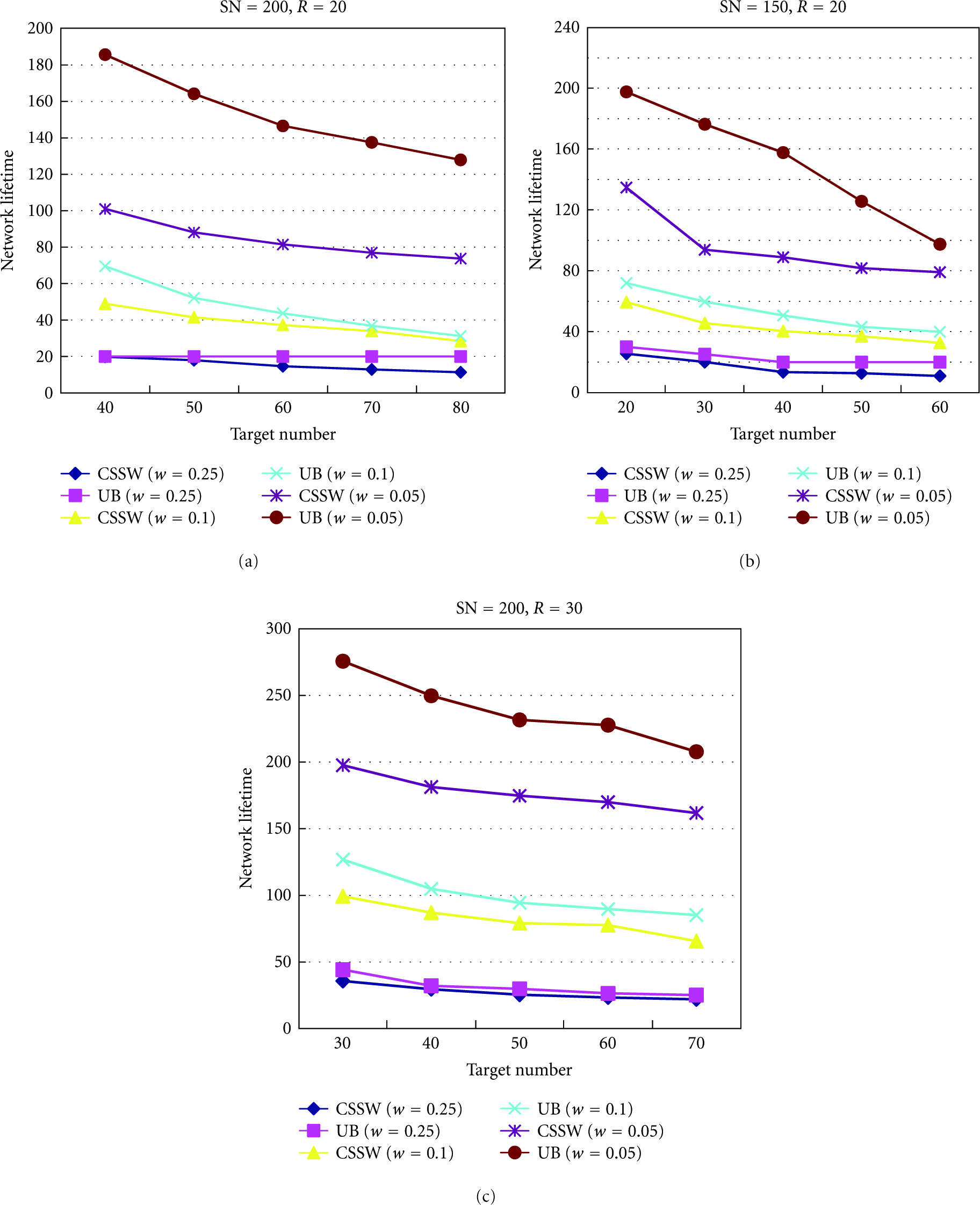
Network lifetime versus target number.
Thirdly, we evaluated the impact of sensing range on our algorithm and upper bound. We set the number of sensors as 120, 120 and 180, and the number of targets as 50, 30, 50, respectively. The sensing range is changed from 25 to 45 with an increment of 5. As Figure 5 shows, the network lifetime increases with the sensing range increasing.

Network lifetime versus sensing range.
According to the results of the above simulations, we find that the smaller the working time of each sector is, the larger the network lifetime is. These results validate the correctness of our example for the network lifetime in Section 3.
Moreover, from the three figures, we can find two phenomena: (1) when fixing the service delay bound, the smaller the serving time w of each sector is, the closer the gap between our algorithm and the upper bound; (2) with the increasing of the sensor number and the sensing range or the decreasing of the number of targets, the network lifetime of our algorithm is farther away from the upper bound.
The reason for the first phenomenon is as follows: when the serving time of each sector is decreased, the maximal number of sectors that each sensor can use is increased, so that the total lifetime of each sensor is increased and is closer to the upper bound.
For the second phenomenon, when the sensors become denser, each sector can cover more targets, the upper bound gets larger while the network lifetime of our algorithm cannot increase any more, since the selected
From the simulation results, we observe that our algorithm is very close to the upper bound, which shows that our algorithm is efficient.
7. Conclusion
In this paper, we study the bounded service delay for target Q-coverage problem in directional sensor networks. This network model can be used in various applications, especially when the network topology changes or some nodes maybe fail. We rotate some correlative sensors to make them serve the targets periodically. This will prolong the service delay which affects the quality of service. Hence, we study the target Q-coverage problem with a bounded service delay in directional sensor networks. We first formulate the problem into a mixed integer programming problem. A centralized scheduling protocol is proposed to address this problem based on assigning the sectors to weight. At last, we compare our algorithm with the upper bound to evaluate our algorithm's efficiency.
Footnotes
Acknowledgments
Dr. D. Li was supported in part by the Fundamental Research Funds for the Central Universities, and the Research Funds of Renmin University of China under Grant 10XNJ032. Ms. X. Lu was jointly supported in part by National Natural Science Foundation of China under Grants 61070191 and 91124001, and Research Fund for the Doctoral Program of Higher Education of China under Grant 20100004110001.