
Abstract
A minimax estimation fusion in distributed multisensor systems is proposed, which aims to minimize the worst-case squared estimation error when the cross-covariances between local sensors are unknown and the normalized estimation errors of local sensors are norm bounded. The proposed estimation fusion is called as the Chebyshev fusion estimation (CFE) because its geometrical interpretation is in coincidence with the Chebyshev center, which is a nonlinear combination of local estimates. Theoretically, the CFE is better than any local estimator in the sense of the worst-case squared estimation error and is robust to the choice of the supporting bound. The simulation results illustrate that the proposed CFE is a robust fusion in localization and tracking and more accurate than the previous covariance intersection (CI) method.
1. Introduction
Multi-sensor networks have received an increasing attention in recent years, due to their huge potential in applications, such as communication, signal process, routing and sensor management, and many other areas. In this paper, we focus on a specific and simple estimation fusion model in a distributed multi-sensor system, which is in fact a two-level optimization in the estimation fusion. Every sensor first optimally estimates the state of target based on its own measurements and then transmits its estimate to the fusion center. The problem of estimation fusion is to find an optimal state estimator based on all the received local estimates. Although the centralized fusion which directly makes use of all measurements from the local sensors in time is theoretically the best fusion strategy, sometimes communication or reliability constraints make it impossible to transmit all the sensor measurements to a fusion center. In contrast, the distributed fusion which only needs to fuse all received local estimates has the advantages of lower communication requirements, improved robustness, and so forth.
However, the fusion algorithms in distributed system have to deal with troubles that do not exist in centralized fusion. One of the difficulties is that the errors of local estimates to be fused are generally correlated, and as a result the distributed fusion cannot be achieved by a standard centralized algorithm such as the Kalman filter. The reasons of this correlation may be a common process noise in target when the state estimates are not fused at each sampling instant, or common prior information in the estimates from previous communication.
Over the last two decades, much research has been performed on distributed fusion [1–6]. Some approaches are looking for the “optimal” linear combination of local estimates in some criteria, such as weighted least squares or minimum variance [1, 2]. In [7], the authors proposed a new multi-sensor optimal information fusion criterion which is weighted by matrices in the linear minimum variance sense. An optimal Kalman filtering fusion with cross-correlated sensor noises is proposed in [8], which assumes that the correlation of sensor noises is accurately known. A unified model for estimation fusion based on the best linear unbiased estimation (BLUE) is proposed in [9]. However, all of the aforementioned methods rely on two assumptions: one is that the local estimates are unbiased and the other is that the error covariance matrix of all local estimates is known.
There are other approaches attempting to reconstruct the optimal centralized estimate from the local estimates. A random weighting estimation method for fusion of multidimensional position data is proposed in [10]. The method in [5, 6, 11] deduces to a linear combination of local estimates, but is not particularly effective in handling the correlation in measurement noises. In the seminal papers [4, 6, 12, 13], the covariance intersection (CI) algorithm was proposed to deal with this problem. It fuses without assuming any knowledge on the correlation between the local estimation errors. A robust estimation fusion is proposed in [14], which assumes that the correlation between the local estimation errors is not accurately known but belongs to an uncertain set. However, it is also a linear combination of local estimates as the other aforementioned methods. Theoretically, the linear combination may not be an accurate formation of the distributed fusion. Recently, a nonlinear estimation fusion is proposed in [15], where it minimizes the estimation error covariance only for the most favorable realizations of the random matrix and models it as an optimization problem with a chance constraint. Such optimization problem is also nonconvex and with appropriate relaxation it can be simplified to a convex problem. Similar with all the other aforementioned methods, it considers the optimal fusion in the sense of statistics, which do not necessarily lead to a small estimation error. There may be the case that the estimation error is very large even though the optimal criteria considered is small. So far, the robustness of the fusion estimation is still a challenge.
In this paper, we are looking forward to establishing a robust distributed fusion strategy under some basic assumptions. This robust fusion is aimed at minimizing the worst-case fusion error, which is achieved through a mini-max problem. Although it is non-convex, we can relax it to a semidefinite program (SDP) following [16]. The resulted SDP problem can be solved quite efficiently in polynomial time by an interior point method; in particular, by the homogeneous self-dual method [17] or toolbox CVX in Matlab. Then the resulted fusion estimate is a form of a non-linear combination of local estimates. Since the geometrical interpretation of our fusion method is in coincidence with the Chebyshev center, we call it the ion (CFE). The basic assumption of this paper is that the local estimation errors are bounded. Although it is not satisfied theoretically if the estimation error is a Gaussian distributed variable, it can be guaranteed in a nearly
The remainder is organized as follows. We briefly introduce the distributed estimation fusion problem in Section 2 and propose the robust CFE method in Section 3. The sensitive analysis about the choice of parameter R in CFE method is provided in Section 4, and some numerical simulations are carried out in Section 5. Section 6 gives conclusions.
2. Distributed Estimation Fusion Problem
Consider the following l-sensor distributed dynamic system:

Kalman's filtering is the best known recursive least mean square (LMS) algorithm to optimally estimate the unknown state of a dynamic system for a single sensor. Thus, the unbiased estimates
There are three possible architectures in distributed fusion depending on the sources of
In order to simplify the derivations, we start by reformulating the local estimate
Assumption 1.
There exists a ball of radius

We believe that Assumption 1 is reasonable, because in practice the estimation error of the local sensor is impossible to be infinitely large, and we can always find a bound on it. In practical applications, even when we have no additional information about
3. The Robust Chebyshev Fusion Estimation Strategy
3.1. The Minimax Fusion Strategy
The most widely used fusion strategy is calculating the “best” linear combination of local estimates to minimize some criteria in statistics, such as minimum variance or weighted least squares. However, there may be some nonlinear formations to fuse the local information that performs better, which is at least as good as the linear combination because the linear combination is a special case of non-linear formation.
Moreover, the optimal fusion strategy in statistical meaning is not necessarily to get a good estimate with respect to the estimation error
Based on Assumption 1, we have observed that the state


The geometrical interpretation of the Chebyshev center is the center of the minimum radius ball enclosing Q. Thus, problem (4) can be equivalently written as

However, computing the Chebyshev center (4) is a difficult optimization problem in general, because the inner maximization is nonconvex quadratic problem. Recent research in the context of quadratic optimization [3] shows that the Chebyshev center can be calculated efficiently when Q is the intersection of two ellipsoids in the complex domain, despite the nonconvexity. While in the real domain and when there are more than two constraints, a relaxed Chebyshev center (RCC) is proposed in [16].
3.2. The Relaxed Chebyshev Center Fusion Estimation
The RCC of Q, which is denoted as
Theorem 2.
The RCC of Q is given by


It is not difficult to cast the optimization problem (7) as the following SDP:


We see that the fusion estimate
Remark 3.
Note that from the definition of Q given in (3) and Theorem 2, the optimal fusion coefficients
Among the variables,
4. Choosing the Support Bound R
From the expression of
4.1. The Sensitivity of the Choice of R
Let us write the SDP problem (9) in the standard literature on linear semidefinite programs by


Assumption 4.
The programs (P) and (D) are strictly feasible and there exist

Based on the above assumption, we consider the solutions of the programs (P) and (D) when there is a perturbation
Theorem 5.
If the programs (P) and (D) satisfy Assumption 4 and the data
Remark 6.
The perturbation
Remark 7.
The result in this theorem is a special case in Theorem 1 in [18], which gives a comprehensive sensitivity result on the perturbation of all data of programs (P) and (D). Thus, our theorem could be a direct corollary from it.
Remark 8.
Although the derivatives
Theorem 9.
The derivatives
Proof.
By the conditions in Assumption 4,
So far, we have theoretically analyzed the sensitivity of a perturbation
4.2. The Geometrical Interpretation of R
From the expression in (3), we see that R in fact determines the size of the l ellipsoids. We illustrate in Figure 1, that the RCC of two interacting ellipsoids is still the same when changing the sizes simultaneously.

The illustration of the insensitivity on the choice of R.
A geometrical interpretation about this phenomenon is that the RCC reflects the center point of the intersection of some ellipsoids in some sense. When simultaneously enlarges or reduces the sizes of these ellipsoids, the resulted RCC still represents the center location in the same sense, so it is not strange that the RCC is insensitive to the choice of R. In fact, as in the simulations in Section 5, we illustrate that the influence of the value of R on the fusion estimation is trivial.
However, we should certify that when changing the value of R, these ellipsoids own a common interaction area. Therefore, we suggest making a conservative choice of R. In practice, we can estimate it from the experienced learning or prior information.
Also from Figure 1, we see that the RCC of two ellipsoids may be either the linear combination of the centers of the ellipsoids or not. So the CFE varies a larger space comparing with the other linear fusion methods.
5. Simulation Experiments in Localization and Tracking
In this section, some simulation experiments are designed to show the performance of the proposed CFE method in localization and tracking and compare it with the result of the previous CI method. In addition, we have designed a numerical simulation to test the sensitiveness of the choice of the value R as well.
5.1. Simulation of Dynamic System
We consider the following dynamic system:

Case 1.
Consider

We use the CFE and CI methods to fuse the two local estimates tracking the target for


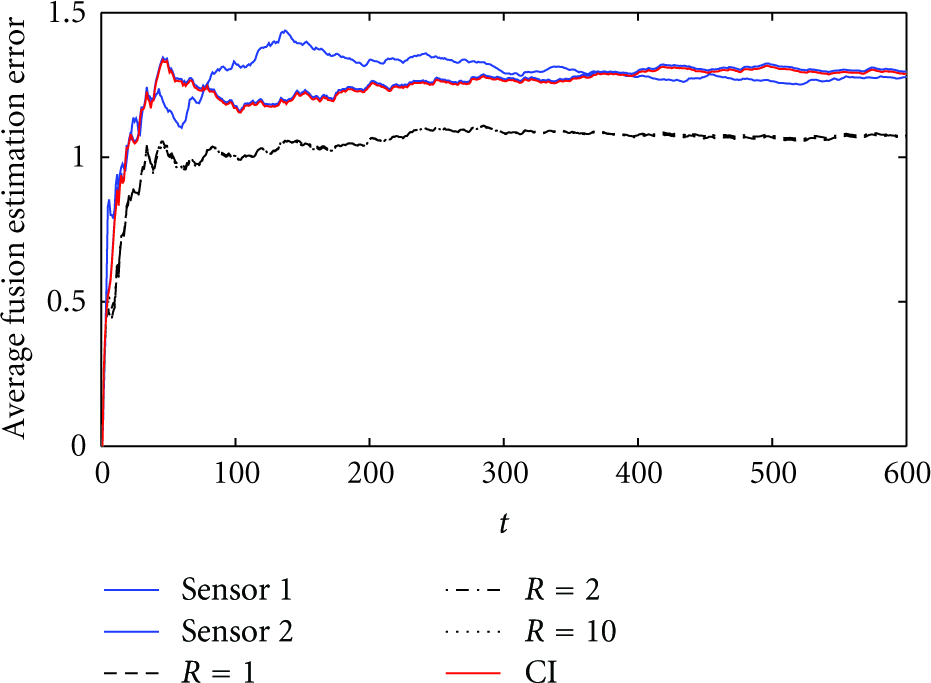
The average estimation error with respect to t for the local sensors, CFE, and CI method for
From Figure 2, we see that the average estimation error of CFE is consistently smaller than the local sensors as well as the CI method for all the choice of
The next simulation is carried out for the same dynamic system as above, but the covariances of the noises

The average estimation error with respect to t for the local sensors, CFE, and CI method for
Figure 4 is the tracks and average estimation errors when
Comparison of the maximal estimation error through the process in the three simulations.


The average estimation error with respect to t for the local sensors, CFE, and CI method for
Case 2.
Consider

The tracks in this case are the same with Case 1. The average estimation errors through the process are illustrated in Figures 5–7. The improved performances of CFE are evidently better than CI when fusing the two local estimates, especially when the covariances of the noises are larger as in Figures 6 and 7. In fact, the performance of CI method in these two simulations are almost the same with local sensor

The average estimation error with respect to t for the local sensors, CFE, and CI method for
The average estimation error with respect to t for the local sensors, CFE, and CI method for

The average estimation error with respect to t for the local sensors, CFE, and CI method for
The maximal estimation error through the process in the three simulations are listed in Table 2.
Comparison of the maximal estimation error through the process in the three simulations.

From Tables 1 and 2, we can see that the maximal estimation errors of CFE are much smaller than that of CI and the local sensors, which verified that the proposed CFE is a robust fusion estimation. Meanwhile, the performance of CFE is insensitive to the choice of R.
5.2. Sensitivity of the Value of R
In this simulation, we focus on the performance of CFE with respect to different values of R. This experiment explores the average estimation error by Monte-Carlos simulation. Suppose that the true initial state
The fused estimation error with respect to R for

The estimation fusion error with respect to the value of R for
6. Conclusions
In this paper, we propose a method using a mini-max strategy to get a robust fusion estimation in distributed multi-sensor systems for localization and tracking. This method is under the basic assumption that the normalized estimation error of local sensors are norm bounded, thus we can characterize the feasible set of the true state by the intersection of some ellipsoids. Then we proposed the mini-max fusion estimation in order to minimize the worst-case squared error. However, the resulted optimization problem is in fact looking for the Chebyshev center of the interaction of the ellipsoids, which is non-convex in nature. We relax it and get an approximate Chebyshev center by solving a relaxed SDP problem. The resulted estimation fusion is not a linear combination of local estimates. Judging from the simulation results, the proposed CFE method is a robust estimation fusion and more accurate compared with the CI method.
Footnotes
Acknowledgments
This work was supported by the National Basic Research Program of China under Grant 2013CB329405 and the National Natural Science Foundation of China under Grants 61102007, 60974147, and 61032001.