
Abstract
In order to reduce the location estimation error in wireless sensor network (WSN), a localization algorithm is proposed combining sliding-mode and spring-relaxation-like techniques for wireless sensor networks in this paper. Our proposed method takes advantage of the spring-relaxation technique. The overall accuracy of the location estimations is improved by sliding-mode technique. The convergence of the proposed algorithm is proved using the convergence conditions of discrete sliding-mode. Moreover, it requires only a few beacons with known locations to compute the location estimations of all sensors. Simulation examples demonstrate the overall accuracy of the proposed method.
1. Introduction
In recent years, with the expanding applications of wireless ad hoc sensor networks, sensor positioning/localization and synchronization become more and more demanding research topics [1, 2]. The location methods can be divided into two categories: range-based and range-free schemes. The range-based schemes estimate locations on the basis of either node-to-node distances or angles [3, 4], which can be used in the applications involving the location estimation of a sensor based on its range measurements from beacon nodes. The first range-based scheme is time-based location estimation, for example, time of arrival (TOA) [5], time difference of arrival (TDOA) [6]. The second range-based scheme is direction-based location estimation, such as angle of arrival (AOA) or direction of arrival (DOA)[7]. The range-based schemes typically have higher location accuracy than the range-free schemes, but require additional hardware to obtain distances or angles and have weakness in the noisy environments.
The main advantage of a range-free scheme is that it does not need the distance or angle information from the beacon nodes to the sensor nodes for their localization [8, 9]. Because the range-free schemes provide more economic and simpler estimations than the range-based ones, they become more popular than the range-based methods. The problem of range-free positioning schemes is that their results are not as precise as those of the range-based methods. However, accurate and low-cost autonomous self-localization is a critical requirement of various applications of a distributed wireless sensor network [10]. In order to solve this problem, a lot of researches have been made [10–14]. In [10], a spring-relaxation technique is proposed for location estimation, which uses received signal strength (RSS, a measurement of the power presented in a received radio signal) indicators for ranging, light-weight distributed algorithms based on the spring-relaxation technique for location computation, and the cooperative approach to achieve certain location estimation accuracy with a low number of nodes with known locations, but it cannot alleviate the influence of noises and the convergence analysis is complicated. The two-step indoor location estimation method is presented based on RSS in a wireless sensor network [11] by using the first-order Taylor series expansion and calculating Jacobian matrix and pseudoinverse matrix, which results in low accuracy and high computation load. In [12], NN-based location method is proposed, which constructs a flexible model based on neural network and uses grid-sensor training phase for accurate localization of sensors. The NN is trained using the RSS values of the grid sensors. A soft computing technique is proposed for range-free location, in which lots of RSS samples are required. It approximates the entire mapping from the anchor node signals to the locations of sensor nodes by a neural network. Yun et al. propose a self-location estimation scheme using ROA for wireless sensor networks without any special device for location awareness [13]. In [14], a potentially nonconvex weighted cost function, whose global minimum estimates the location of the sensor one seeks, is proposed and the proposed algorithm guarantees the practical convergence. But the choice of the weights is difficult.
Aiming at getting more accurate location estimation without additional hardware, a sliding-mode and spring-relaxation-like technique is proposed. The main advantages of this paper are (1) the proposed method takes advantage of the spring-relaxation technique; (2) introducing the sliding-mode technique into location estimation for the first time, which makes the design and convergence analysis clear and simple, and the computation load low; (3) unlike [14], this paper does not need strict assumptions; (4) it can cope with noises explicitly and has strong robustness, namely, it shows graceful performance degradation in the presence of noise.
The rest of the paper is organized as follows. Section 2 presents our localization method in details. Section 3 provides the simulation results covering studies in system design and parameter design. Finally, Section 4 summarizes our conclusions.
2. Localization Algorithm
2.1. Range Measurement Scheme
The observation space shown in Figure 1 is a set of range measurements, and the parameters of location that need to be estimated are the geographical coordinates of the sensor node. We assume the random variation of RSS is a log-normal Gaussian random variable due to shadowing effect. Thus we can describe that RSS in dB is distributed with
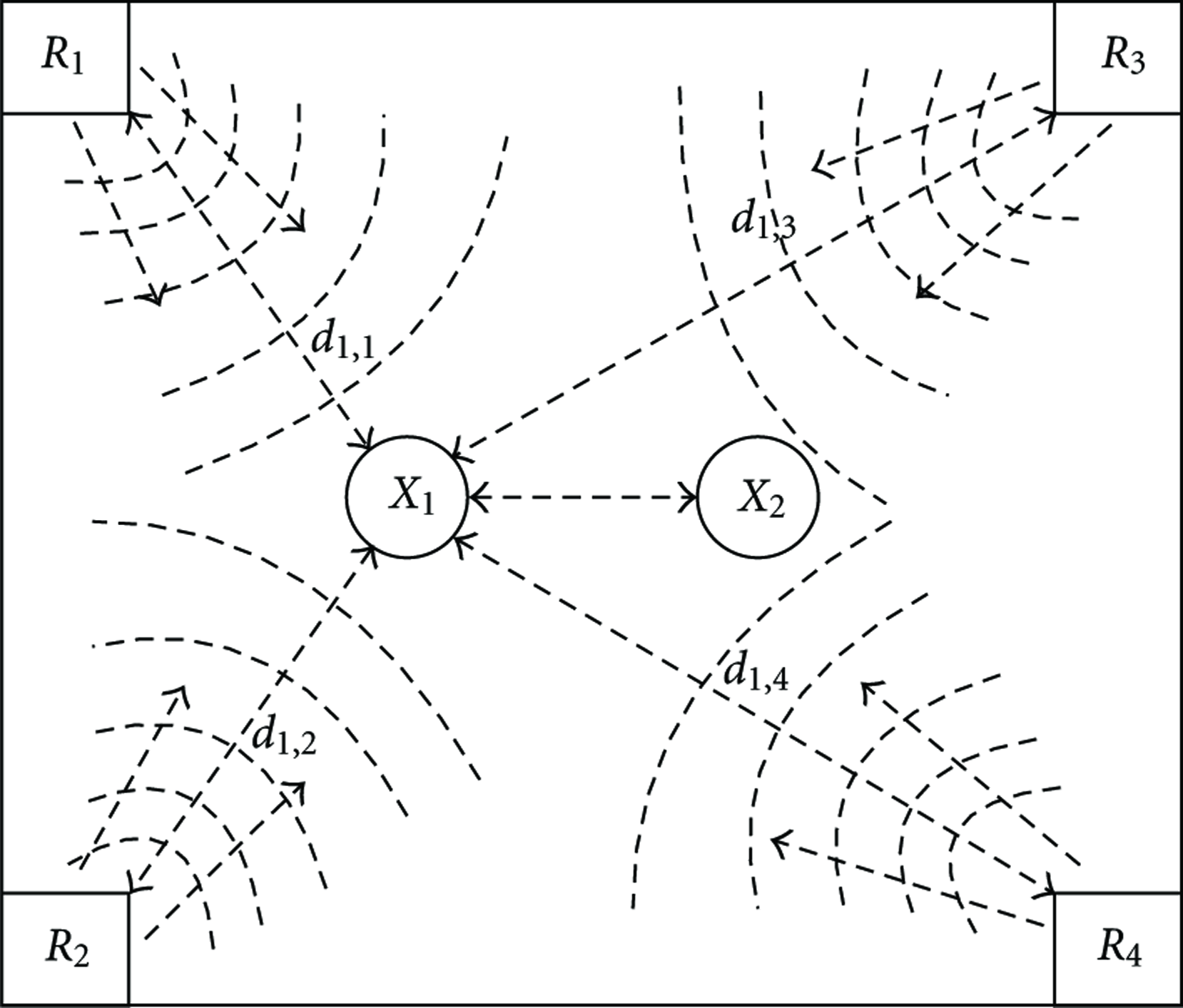
Referenced network topology.
In Figure 1, the reference nodes (
2.2. Sliding-Mode and Spring-Relaxation-like Technique for Localization
We assume that
The term “sliding-mode” first appeared in the context of relay systems. It may happen that the control as a function of the system state switches at high frequency and results in the states moving along the “switching surface”, which is referred to as “sliding-mode”. Sliding-mode technique is a robust method and can be applied to drive control systems in the presence of model uncertainties and external disturbances. Define switching surfaces as


where
The scalar quantities
In order to guarantee
where
Firstly, we give the location estimation Algorithm 1 without the information about mean of measurement noise.
In the algorithm, there are several design parameters that are used to adjust the algorithm behavior and control the algorithm execution. Threshold, τ, is a constant used to define the visibility or connectivity.
If the RSS
Secondly, we give the location estimation Algorithm 2 with the information about mean of measurement noise, where
distance between choose
From (1), we have

where
Let

For small
Substituting (6) into (4), we have

Namely,

Taking absolute value on both sides of (8) gives

If we choose

The inequality implies that


So we can obtain that

holds. According to (9) and the inequality (13), one can conclude that

holds. So as
In the following, we will prove the convergence of
Following the process above, under the assumption that

Therefore, as
To show the effectiveness of the proposed method, we will analyze the robust performance in the following. If there exists noise, then (4) can be rewritten as

where
Case 1.
Substituting (6) into (17) yields

Case 2 (
and
).

Case 3 (
and
).
If
Case 4 (
and
).
It is easy to show that the inequality (19) holds.
From the analysis above, we know the inequality (19) holds. According to sliding-mode convergence condition,
3. Simulation Studies
The simulation model is shown in Figure 1. The simulation parameters and ranges for the performance evaluation and ranges are shown in Table 1.
Typical values and ranges of simulation parameters [16].

To generate RSS samples as a function of distance, the path loss model with the log-normal shadowing effects is used [7]:

where PL(d) is the path loss for the distance between reference nodes and the sensor node. To consider indoor environment in the simulation, we assume that the value of
Let the initial conditions be
The parameters of the proposed algorithm are chosen as follows:
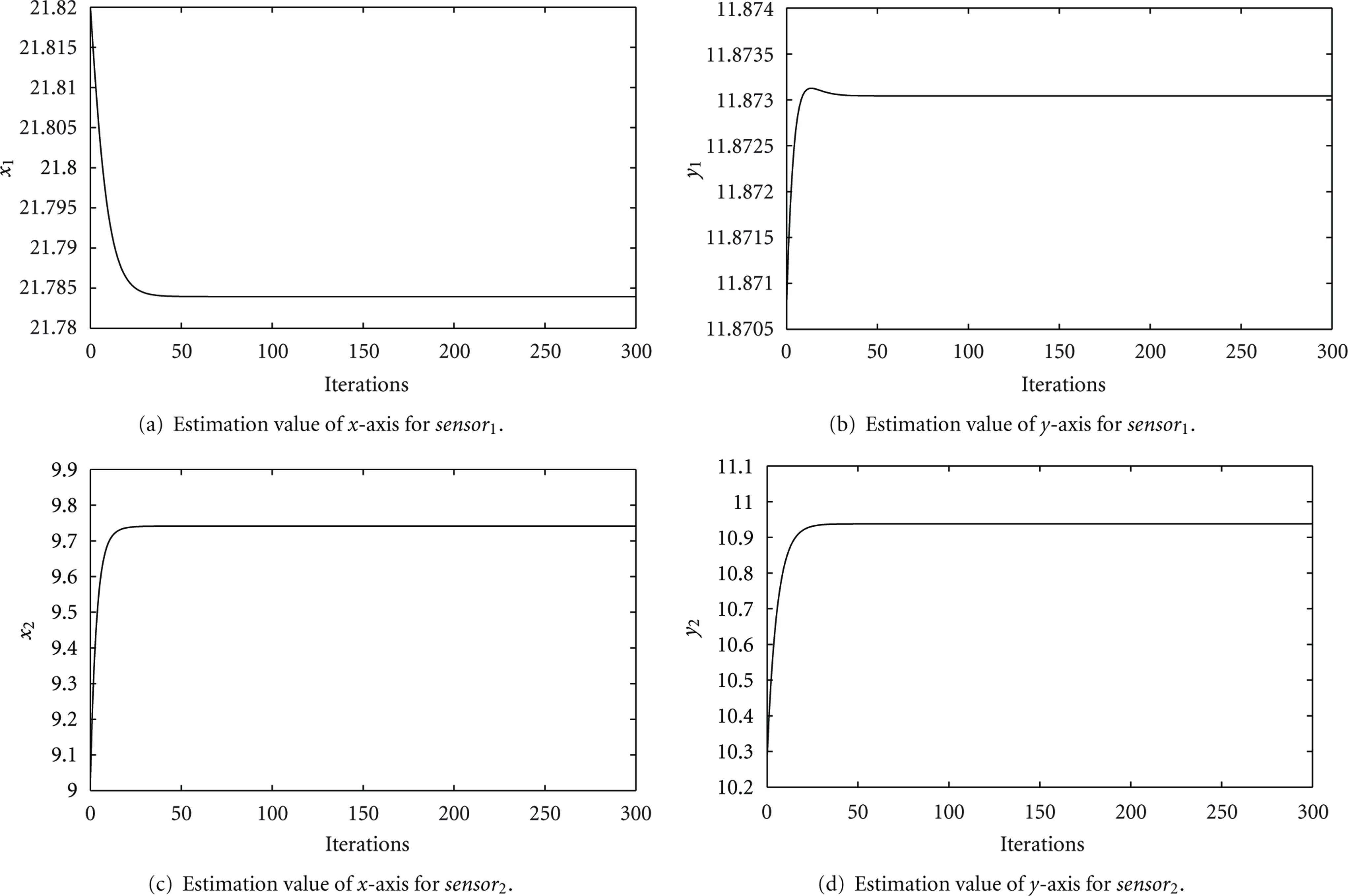
Figures 2(a)–2(d) show the location estimations of the

Location estimations of the proposed method in this paper without measurement noise (Algorithm 1).
Figures 3(a)–3(d) show the average location estimations of 200 runs in the case of Algorithm 1 with measurement noise. The true value of

Location estimations of the proposed method in this paper with measurement noise (Algorithm 1).
Figures 4(a)–4(d) show the average location estimations of 200 runs in the case of Algorithm 2 with measurement noise. The true value of

Location estimations of the proposed method in this paper with measurement noise (Algorithm 2).
Figures 5(a)–5(d) show the average results of the method proposed by Zhang et al. in [10]. The true value of
Location estimations of the proposed method in [10] with measurement noise.
It is obvious that the overall accuracy of the proposed method is improved greatly. With the information about measurement noise, the accuracy of Algorithm 2 is better than that of the Algorithm 1. The accuracy of Algorithm 1 is better than that of the algorithm proposed by Zhang et al. [10].
4. Conclusions
In this paper, a localization algorithm is proposed combining adaptive estimation sliding-mode and spring-relaxation-like techniques for wireless sensor networks. Our proposed method takes the advantages of the spring-relaxation technique. We use the proposed method to obtain higher accuracy of location estimation through introducing sliding-mode technique. Moreover, it requires only a few beacons with known locations to compute the location estimations of all sensors. Simulation examples demonstrate the overall accuracy of the proposed method.
Even though the simulation studies show graceful performance degradation in the presence of noise, an explicit convergence analysis in the noisy case needs more attention in future research.