
Abstract
Area coverage is one of the key issues for wireless sensor networks. It aims at selecting a minimum number of sensor nodes to cover the whole sensing region and maximizing the lifetime of the network. In this paper, we discuss the energy-efficient area coverage problem considering boundary effects in a new perspective, that is, transforming the area coverage problem to the target coverage problem and then achieving full area coverage by covering all the targets in the converted target coverage problem. Thus, the coverage of every point in the sensing region is transformed to the coverage of a fraction of targets. Two schemes for the converted target coverage are proposed, which can generate cover sets covering all the targets. The network constructed by sensor nodes in the cover set is proved to be connected. Compared with the previous algorithms, simulation results show that the proposed algorithm can prolong the lifetime of the network.
1. Introduction
With development of wireless communication technology and microelectromechanical system (MEMS) technology, the cost, power, and volume of sensors decrease, while functions increase. Sensors can sense data or events in sensing regions, handle them, communicate with other sensors, and finally transmit the processed data to the base station.
In recent years, wireless sensor networks (WSNs) have been used extensively in many fields, such as monitoring the living environments and behaviors of wild animals [1], detecting the temperature and pressure of craters and earthquakes [2], military supervising, tracking targets, health cares, and vehicular applications [3, 4]. In a WSN, the batteries of sensors are limited and it is not feasible to recharge for large numbers of sensors in many applications. In such an energy-constrained WSN, if sensors are all in the working state simultaneously, excess energy would be wasted and the collected data would be highly correlated and redundant. Therefore, it is critical to make an effective schedule to let one subset of sensors in the working state and the remaining in the sleeping state such that the sensing region can be covered in a long time without recharging. Coverage problems in WSNs have been widely studied [5–8] and can be classified into the following three types [9].
Area coverage [10–13] is to cover a sensing region. Sensors are randomly or deliberately deployed to cover every point in the region.
Target coverage [14–16] is to cover a target set. Sensors and targets are deployed in a region and sensors can cover all the targets in the target set.
Barrier coverage [17, 18] is to cover a long belt region. A belt region is covered if an intruder is detected when crossing the region along any path.
These three kinds of coverage are shown in Figure 1.

Three kinds of coverage.
In this paper, we mainly discuss the area coverage problem, which is similar to the art gallery problem [19] in computational geometry. In the art gallery problem, cameras are placed such that every point in the art gallery is monitored by at least one camera. In area coverage, sensors are deployed and scheduled such that every point in the sensing region can be covered by at least one sensor. Full coverage and connectivity are two important requirements for WSNs. The environment can not be monitored in an accurate way without full coverage and sensor nodes can not communicate with each other to process the sensed data and transmit them to the base station without connectivity.
In recent years, many approaches have been proposed for area coverage problems and target coverage problems, respectively. However, few results integrate them together. In this paper, we study area coverage problems by applying an approach that can solve target coverage problems effectively.
The main contributions of the paper are as follows.
We design an energy-efficient approach for area coverage problems from a new perspective, that is, solving the area coverage problems by transforming the area coverage problem to the target coverage problem. We propose two dynamic schemes for the converted target coverage problems to generate cover sets and prove that these cover sets can cover the sensing region completely. Compared with the previous works, our approach can prolong the lifetime of the network significantly by simulations. The two schemes can also be used in the general target coverage problems. We prove that as long as the sensing region is completely covered, the network is connected when the communication radius of every sensor node is no smaller than twice of its sensing radius.
The rest of the paper is organized as follows. Section 2 gives the existing results about area coverage, target coverage and connectivity. Section 3 gives the problem statement, some definitions, and assumptions. Section 4 gives the proposed algorithm and two schemes to generate cover sets. In Section 5, we discuss the performance of the algorithm. In Section 6, we show the superiority of our algorithm by simulations. Finally, Section 7 concludes the paper.
2. Related Works
We mainly consider the problem of transforming area coverage to target coverage to maintain coverage and connectivity simultaneously. We now give some related works about area coverage, target coverage, and connectivity in this section.
2.1. Area Coverage
Area coverage is to cover or monitor a region such that every point in it can be covered by at least one sensor node.
In [11], Zalyubovskiy et al. proposed an energy-efficient algorithm for area coverage problems. The locations of sensor nodes are determined and their sensing ranges and communication ranges are adjustable. The algorithm adjusts the sensing radii of sensor nodes and arranges them optimally. In addition, the authors gave two types of coverage models. In the first model, the centers of three neighboring disks with the same sensing radius are connected to be an equilateral triangle. In the second model, the centers of four neighboring disks with the same sensing radius are connected to be a square.
In [12], Misra et al. proposed a coverage algorithm based on Euclidean distance. It requires a cluster head node with high-power, high-computation, and communication capacity for each local region. These cluster heads communicate with common sensor nodes in the same local region, deal with their locations, and generate cover sets independently. A new one will be activated after a cover set finishes its work.
In [13], Kasbekar et al. proposed a polynomial time and distributed k-coverage algorithm to maximize the network lifetime. The algorithm does not require the knowledge of locations of sensor nodes and directional information, but only needs to know the distance between any two communication neighbors and their sensing radii. The algorithm includes two phases, initialization phase and activation phase. In the initialization phase, every node u knows local information including the intersection point set
2.2. Target Coverage
Target coverage is to cover a target set such that all the targets in it can be covered by at least one sensor node.
In [14], Cardei et al. proposed a centralized solution based on linear programming (LP) to generate nondisjoint cover sets for the target coverage problem. It takes a high complexity of
In [15], Zorbas et al. proposed an effective coverage algorithm (CCF) for target coverage. CCF divides all the sensor nodes into cover sets, each of which can cover all the targets. These cover sets are disjoint or nondisjoint. The algorithm assigns a weight for each sensor node u, which combines both its monitoring capacity and remaining energy. The authors gave a static-CCF scheme and a dynamic-CCF scheme to produce cover sets, respectively. During the construction of cover sets, the node with a higher weight is preferred to be selected. The static-CCF assigns a weight for every node to describe its relation with Critical Targets. The weight is computed only once at the beginning of the algorithm, and it remains constant until the termination of the algorithm. On the other hand, in the dynamic-CCF scheme, the weight varies dynamically with the set of critical targets during the process of the scheme.
In [16], Shih et al. mainly considered the connected target coverage (CTC) problem in wireless heterogeneous sensor networks with multiple sensing units. The problem can be reduced to a connected set cover problem and further formulated as an integer linear programming (ILP) problem. However, the ILP problem is NP-complete. Therefore, two distributed heuristic schemes, REFS (Remaining Energy First Scheme) and EEFS (Energy Efficiency First Scheme), were proposed. In REFS, each sensor node determines whether it should activate itself such that all targets can be covered and the sensed data can be delivered to the sink, according to its remaining energy and the decisions of its neighbors. The advantages of REFS are its simplicity and reduced communication overhead. To utilize energy of sensor nodes efficiently, EEFS was proposed. In EEFS, the sensor node considers its contribution to coverage and connectivity to make a better decision.
3. Definitions of the Problem
We give some assumptions and definitions before describing the problem.
Assumption 1.
All the sensor nodes are randomly deployed in a sensing region 𝒜, and 𝒜 can be completely covered. If 𝒜 is very large, we divide it into several smaller subregions by following a divide-and-conquer approach [12]. Each of them executes the algorithm independently.
Assumption 2.
All the sensor nodes are static and location-aware. Every node has a unique ID to identify itself, and their locations can be obtained via some localization techniques [20].
Assumption 3.
All sensor nodes have the same sensing radius and the same communication radius; that is, all the sensor nodes are homogeneous.
Assumption 4.
The sensing range of a sensor node u is a disk of radius r, centered at the location of u. A sensor node v located within the sensing range of u is denoted by
Assumption 5.
To guarantee the connectivity of the network, the communication radius R of each node must be no smaller than twice of its sensing radius r, which will be proved in Theorem 8. If the network is not connected, the sensed data can not be delivered to the base station and the paper will lose real significance.
Definition 1.
Given a convex region 𝒜, if every point
Definition 2.
Given a target set T, if each target
Definition 3.
The set composed of sensor nodes in the working state and satisfying the requirement of area coverage or target coverage is called cover set. If some sensor nodes belong to different cover sets, these cover sets are called nondisjoint cover sets. If each sensor node belongs to only one cover set, these cover sets are disjoint cover sets. The size of cover sets is an important measurement of the performance of one scheduling algorithm. The smaller a cover set is, the less the energy consumption is.
Definition 4.
Network lifetime is the time interval from the activation of the network until the first time at which a coverage hole appears, or from the point that the network starts operation until the set consisting of all the sensor nodes with nonzero remaining energy is not a cover set any more.
According to the assumptions and definitions above, we can describe the problem as follows.
Given a convex region 𝒜, transform the area coverage to the target coverage and find efficient strategies for target coverage to generate as many cover sets as possible such that nodes in each cover set can cover all the targets in the converted target coverage problem.
4. Algorithm Description
In this section, we propose an algorithm for the area coverage problem with boundary effects (Pseudocode 1). The algorithm includes two phases, transformation phase and cover set generation phase. The former considers how to transform the area coverage problem to the target coverage problem. In this phase, a large sensing region is divided into several smaller subregions, and in each of which, there are some parameters and information of intersection points among disks of sensor nodes or between disks of sensor nodes and boundaries, which can be used as the input of the second phase. These intersection points are the targets in the second phase. In the second phase, we propose two-centralized schemes for the converted target coverage problem obtained from the first phase. Each sub-region executes them independently. The two schemes generate cover sets that can cover all the targets obtained from the first phase. In both of the two schemes, every sensor node is assigned a weight. When selecting a new sensor node for a cover set, the node with a larger weight is preferred. The process operates until the target set is empty. Then a new cover set is generated. Obviously, the two schemes can also be used in the general target coverage problems.
/*The following is the transformation phase*/ /* The transformation phase ends*/ /*The following is the cover set generation phase*/ /* The cover set generation phase ends*/
4.1. Transformation Phase
If sensor nodes are randomly deployed in a large convex sensing region 𝒜, 𝒜 can be divided into several subregions, that is,

The dotted lines are the virtual boundaries between two subregions.
Theorem 5.
Given a set of sensor nodes
Proof.
By contradiction, assume that all targets in T are covered, but there is a small region not covered, denoted by D and p is a point in D. D can be one of the following two cases.
Case 1.
Point p lies in a region D whose boundary is only composed of exterior arcs of a collection of sensing disks (see Figure 3). Since the sensing disks themselves are outside the sensing range of sensor nodes (see Assumption 4 in Section 3), the entire boundary of D, including the intersection points of sensing disks, is not covered. This contradicts the assertion that all targets are covered.

D is bounded by exterior arcs of a collection of sensing disks.
Case 2.
Point p lies in a region D bounded by exterior arcs of a collection of sensing disks and boundaries. As shown in Figure 4, D is in a region bounded by exterior arcs of nodes u, v, x, and the lower boundary. Similarly to Case 1, the entire boundary of D, including the intersection points of nodes u, v, and x and intersection points between nodes v, x, and the lower boundary, is not covered. This contradicts the assertion that all targets are covered.

D is bounded by exterior arcs of a collection of sensing disks and the lower boundary.
In summary, C that covers all the intersection points among disks of sensor nodes or between disks of sensor nodes and boundaries (not including virtual boundaries) can also cover the whole sensing region. Thus, the theorem is true and we can transform the area coverage problem to the target coverage problem.
4.2. Cover Set Generation Phase
In this phase, we propose two dynamic cover set generation schemes (Algorithms 1 and 2) for the converted target coverage problem. Both of them can generate cover sets to cover all the targets in T.
/*If there is more than one sensor node that has the largest weight in more energy is selected.*/ return /*If there is more than one sensor node that has the largest weight in more energy is selected.*/ output
Algorithm 1
return output
Algorithm 2
Before executing the two schemes, the following parameters need to be stated.
C is the cover set produced by the two schemes, and S is the set of sensor nodes deployed. T is the set of intersection points obtained in the transformation phase. w is the number of cover sets that each sensor can participate in initially.
Initially, Algorithm 1 assigns a weight for every sensor node
Initially, Algorithm 2 assigns a weight for every sensor node
We prove the correctness of the two cover set generation schemes above now.
Theorem 6.
Both of the two schemes can generate at least one cover set, if there exists one in the network.
Proof.
Assume that

By contradiction, suppose that



From (2), (3), (4), we have

5. Algorithm Analysis
In the cover set generation phase, we select sensor nodes for cover sets according to the following three criteria.
The sensor node covering a larger number of targets has a higher priority. Minimize the probability of covering a target multiply. Promote candidates with more remaining energy.
For (1), Algorithm 1 assigns a weight for every sensor node
For (2), in Algorithms 1 and 2, as for every target
For (3), Algorithm 1 selects a sensor node with more energy when there is more than one node that has the largest weight. When considering the tradeoff between the remaining energy of a sensor node and the number of targets covered by it, we propose Algorithm 2, which combines criterion 1 and 3, and assigns a weight for every sensor node
Now, we give the algorithm for solving area coverage problems. The pseudocodes are as follows.
The complexity of the algorithms executed in each sub-region is
Since there are many sensor nodes in the sensing region, one target may be covered by multiple sensor nodes. Assume that there are x sensor nodes in the smallest set
Both of Theorems 5 and 6 above fit the case in one sub-region, and the proof of coverage in the whole region 𝒜 is as follows.
Theorem 7.
The whole large region 𝒜 can be covered when it is divided into multiple subregions and each of them executes the algorithm independently.
Proof.
We divide a large sensing region 𝒜 into several smaller subregions by following a divide-and-conquer approach in order that our algorithm can be widely used in large sensing regions. In the transformation phase, the intersection points among disks of sensor nodes or between disks of sensor nodes and boundaries (not including virtual boundaries) of subregions are calculated as the targets used in the cover set generation phase. Targets in all these subregions constitute the targets in T. In each sub-region, cover set generation schemes work independently on the targets that also include the intersection points between disks of sensor nodes and virtual boundaries. Thus, the number of targets in all these subregions is more than the number of targets in T. From Theorem 6, the cover sets generated can cover all the targets in each sub-region. Thus, all the targets in T can also be covered. From Theorem 5, if all the targets in T can be covered, the whole region can also be covered. Thus, the theorem is right.
According to the theorem, the proposed algorithm can be applied in large networks with thousands or more nodes.
Theorem 8.
The network constructed by sensor nodes in any cover set is connected when the communication radius of any sensor node is no smaller than twice of its sensing radius.
Proof.
By contradiction, if the network is not connected, there exists a pair of sensor nodes with no path between them. Assume that

Firstly, we prove that there must be other sensor nodes inside the disk of x. We prove it by contradiction. Assume that there are no other nodes inside the disk. In order to contain another sensor node y, the disk x moves a shortest distance ε along
According to Theorem 8, we can ensure the network connectivity. Then the sensed data can be transmitted to the base station.
6. Simulations
We describe the simulation results from three aspects, the size of cover sets, the number of cover sets, and coverage redundancy. The size of cover sets is the number of working sensor nodes in cover sets. The size of cover sets is inversely proportional to the lifetime of the network. The number of cover sets is the number of cover sets theoretically produced by the algorithm and is directly proportional to the lifetime of the network. When the required coverage degree is 1, the case that every point in the sensing region covered by only one sensor node is hardly achieved for full coverage and the case that many small parts of the sensing region are multicovered is called coverage redundancy. Without considering fault tolerance of the network, coverage redundancy must be reduced when designing an algorithm for coverage problems. The smaller the redundancy is, the longer the lifetime of the network is.
Our algorithm includes two phases, transformation phase and cover set generation phase. The second phase works on the targets generated in the first phase. The schemes in the second phase can also be used in the general target coverage problems. To prove the superiority of our schemes for target coverage problems, we firstly compare our schemes with static-CCF [15]. As shown in Figure 6, t and n are the number of targets and the number of sensor nodes in a

Compare our schemes with static-CCF.
Figure 6 considers target coverage problems. In the following simulations, we consider area coverage problems. If the sensing region is large, we can divide it into several subregions by following a divide-and-conquer approach. Each sub-region executes the algorithm independently. In the following simulations, we mainly consider one sensing region with the size of
The network topologies under Algorithms 1 and 2 are shown in Figure 7. Only Algorithm 2 considers the values of a and b, and here we only consider the case of
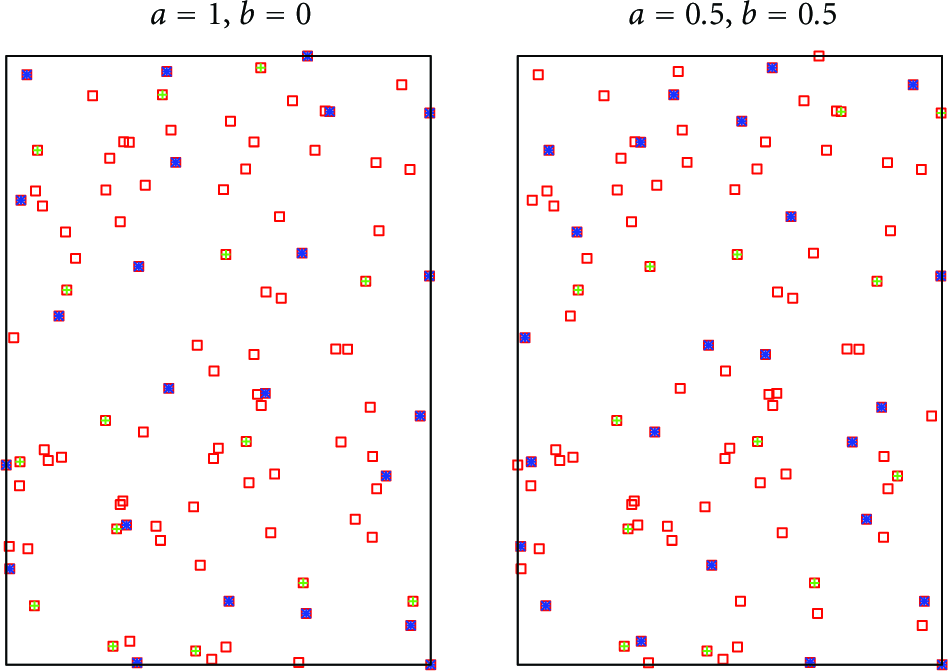
The network topology.
Figure 8 shows the average size of cover sets with
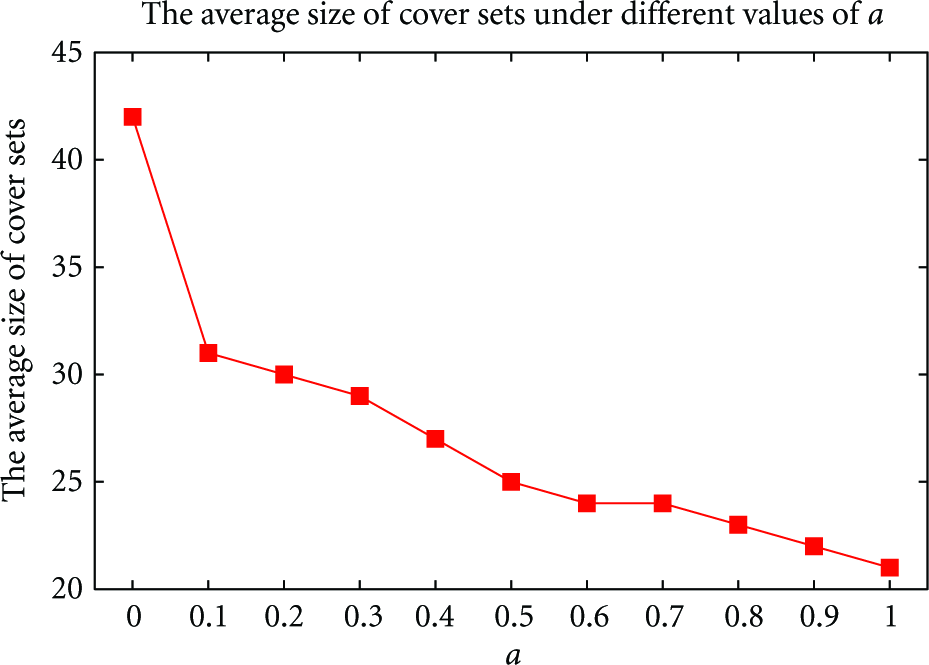
The average size of cover sets with
Figure 9 shows the number of cover sets under different numbers of sensor nodes randomly deployed. Here,

The numbers of cover sets under different numbers of sensor nodes deployed.
Figure 10 describes the relation between energy and the number of cover sets produced. Here,

The relation between energy and the number of cover sets produced.
Figure 11 represents the comparison of the average coverage degrees among CPLC, Algorithms 1 and 2 under different numbers of sensor nodes randomly deployed. When the required coverage degree is 1, many small parts of the sensing region may be multicovered, and the coverage degree of the whole sensing region on average is called the average coverage degree. Obviously, compared to CPLC, the average coverage degree obtained from our proposed schemes is lower; that is, the proportion of the sensing region multicovered is small. Without considering fault tolerance of the network, the lower the average coverage degree is, the less the coverage redundancy is. Here,

Figure 12 represents the comparison of the average size of cover sets under different numbers of sensor nodes deployed. Here,
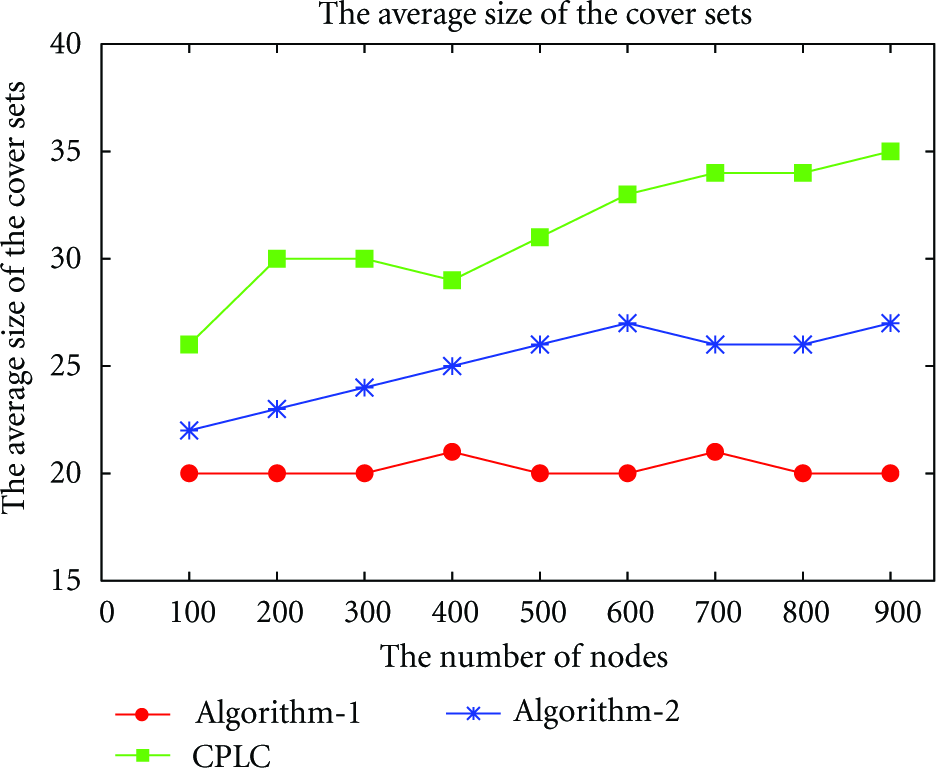
The comparison of the average size of cover sets under different numbers of sensor nodes deployed.
Figure 13 represents the comparison of coverage redundancy under different algorithms. Here, 200 sensor nodes are randomly deployed,

The comparison of coverage redundancy under different algorithms.
7. Conclusion and Future Work
In this paper, we discuss the area coverage problem with boundary effects and propose a new approach that integrates the area coverage with the target coverage and transforms the coverage of all the points in the sensing region to the coverage of a fraction of targets to achieve full area coverage. The algorithm is divided into two phases, transformation phase and cover set generation phase. The first phase is to transform the area coverage problem to the target coverage problem. The second phase gives two cover set generation schemes for the converted target coverage problem. The two schemes can also be used in general target coverage problems. Then, we set the communication radii of sensor nodes no smaller than twice of their sensing radii to guarantee network connectivity. Finally, we prove by simulations that our proposed algorithm is better than other algorithms and that the lifetime of the network is prolonged.
In Section 3, we give some assumptions. Assumption 2 is that every sensor node is static and location-aware. Assumption 3 is that all the sensors are homogeneous. Due to the variety of the real environment, we can relax the two assumptions to be closer to the real environment. For example, we can study the case that the locations of sensor nodes are unknown, and the case that all the sensor nodes are heterogeneous, or both of the two cases.
Footnotes
Acknowledgments
This work was partially supported by the National Natural Science Foundation of China for contract (60373012, 11101243), Natural Science Foundation of Shandong Province for contract (ZR2012FM023, ZR2009GM009), STPU of Shandong Province for contract (J10LG09), and TKP of Shandong Province for contract (2009GG10001014).