
Abstract
Intelligent transport system (ITS) has large potentials on road safety applications as well as nonsafety applications. One of the big challenges for ITS is on the reliable and cost-effective vehicle communications due to the large quantity of vehicles, high mobility, and bursty traffic from the safety and non-safety applications. In this paper, we investigate the use of dedicated short-range communications (DSRC) for coexisting safety and non-safety applications over infrastructured vehicle networks. The main objective of this work is to improve the scalability of communications for vehicles networks, ensure QoS for safety applications, and leave as much as possible bandwidth for non-safety applications. A two-level adaptive control scheme is proposed to find appropriate message rate and control channel interval for safety applications. Simulation results demonstrated that this adaptive method outperforms the fixed control method under varying number of vehicles.
1. Introduction
Intelligent transport system (ITS) has received wide interests since the last decade due to its huge potentials on traffic safety applications, business logistics, route planning, entertainment, and many other applications. However, one of the big challenges for ITS is on the vehicle machine to machine communications. Due to the large quantity of vehicles, high mobility, and bursty traffic from the safety and nonsafety applications, the traditional cellular networks can not provide cost effective and real-time communications for large-scale ITS applications, especially for safety applications. On the other hand, among the broad ITS applications, road traffic safety applications have been a subject of worldwide concern. It has been extensively studied to actively prevent accidents or passively minimize the consequences of accidents. Driven by advances in wireless communications and mobile networking, collaborative safety applications (CSAs) enabled by vehicular communications are widely considered to be key for the success of future road safety [1]. Vehicle to vehicle (V2V) and vehicle to infrastructure (V2I) communications can enable exchange of vehicle information and proactive warning of potential hazards for collaborative safe application, such as emergency stops, merging traffic, vehicles in a driver's blind spot, imminent collision, and driving assistant messages that related to safety driving.
Among direct V2V communication technologies, dedicated short-range communications (DSRC) is a strong candidate for CSA. Compared to cellular networks, it can provide very high data transfer rates at low cost in circumstances where minimal communication latency and isolated relatively small communication zones are important. DSRC technology is robust and can be built into large-scale vehicles [2–4]. The US Federal Communications Commission (FCC) has allocated 75 MHz of spectrum in the 5.9 GHz band for DSRC [5]. DSRC standards are currently being developed by organizations including the IEEE [6] and the Society of Automobile Engineers (SAE). IEEE is specifying a wireless access in vehicular environment (WAVE) for DSRC to provide seamless, interoperable V2V, and vehicle to roadside unit (RSU) (V2R) communication services [6]. SAE is defining a standard message set and data dictionary for DSRC-based vehicle safety applications. The US National Highway Traffic Safety Administration (NHTSA) has undertaken several projects to test vehicle safety applications performance by simulation and field experiments.
To reduce system costs, both road safety applications and non-safety applications are likely to be deployed over multiple DSRC channels. According to the specified multichannel operations, time-division multiplexing is used for the DSRC devices to monitor the control channel (CCH) for safety information and service channels (SCH) for non-safety applications. All the DSRC devices need to monitor CCH at the CCH intervals. One big challenge for the coexisting safety and non-safety application is how to effectively ensure QoS for safety applications while leave as much as bandwidth for non-safety applications. Safety applications have higher priority and they have stringent requirements for reliable real-time message delivery, as excessive message delays or message loss hinders the effectiveness of CSA and can even cause unexpected negative consequences. However, the QoS requirements are hard to be met by the random channel access specified in the IEEE 802.11 DCF [7–10]. On the other hand, the non-safety applications should not get as much bandwidth as possible to provide efficient non-safety services. For the safety applications, their QoS perceived are affected by a wide range of factors, such as resource provisioning and congestion control. In this paper, we consider two major types of safety applications: event-driven safety applications (ESA) and periodic safety applications (PSA). Their QoS can be differentiated by channel access schemes and message rate control schemes. ESA is designed to be used for emergency scenarios. It creates and broadcast messages if accidents happened or are emerging. PSA is designed for announcing existence of a vehicle and broadcast non-emergent messages. PSA messages are periodically generated and broadcasted to help build mutual awareness and implement some simple CSAs [1]. Compared to PSA messages, ESA messages have higher priority to inform or make a caution to the following vehicles with global positioning system (GPS) information included.
With the challenges on the development of coexisting safety and non-safety applications over DSRC-based vehicle networks, it is important to improve the utilization of the limited spectrum resources for DSRC networks, while meeting the QoS requirements for the road safety applications. In this paper, we propose an adaptive control scheme to avoid network congestion and provide good QoS for safety applications. The objectives are to provide high-availability and low-latency channel for high-priority, ESA messages and maximize channel utilization for low priority PSA messages and non-safety applications. To facilitate the adaptive control of the DSRC networks, we use an off-line simulation based approach to find out the best possible configurations of CCH interval, safety message rate, and channel access parameters for given combinations of safety QoS requirements and the number of vehicles. Here we assume each vehicle in the network is equipped with a DSRC radio. A utility function is proposed to take the QoS requirements of safety applications into account and solve the multiple objectives optimization problem for the coexisting safety and non-safety applications. The identified configurations are then adaptively used online by a roadside access point (AP) for both CCH interval control and channel access control. We focus on the broadcast-based safety applications in this paper.
In the literature, Wang and Hassan [11] investigated the impact of CCH interval on the QoS of single safety application and channel availability for non-safety applications. However, the service differentiated channel access and congestion control are not considered in [11]. The authors have studied adaptive message rate control for DSRC vehicle networks, in which safety message rate is controlled in a distributed manner by the vehicles in freeways [10]. In this paper, the focus is on a road intersection where an access pointer (AP) is deployed for centralized network control. A distributed message rate control method for ad hoc vehicle networks is proposed for single safety application in [12]. A centralized message rate control in road intersections is studied for two differentiated safety application in [13]. However, it is noted that all the above works have not considered the impact and adaptive configuration of CCH interval.
The remaining of this paper is organized as follows. We briefly introduce the background knowledge on DSRC and 802.11p Standard in Section 2. Section 3 presents the design of the adaptive congestion control method. Numerical results are presented in Section 4. Finally, we make a conclusion in Section 5.
2. Background
2.1. DSRC Standard Activities
For economic concerns, DSRC is expected to provide both road safety and commercial services. The overall WAVE architecture developed by IEEE for DSRC includes IEEE 802.11p (MAC and PHY standards) and IEEE Std 1609.1 to 1609.4. At the MAC layer, IEEE 802.11p is based on IEEE 802.11e, which has been augmented with QoS support. IEEE 802.11e can provide multiple priorities to different applications by differentiating DCF-based channel access parameters [7]. At the physical layer, 802.11p is the same as 802.11a except that 802.11p is operated with 10 MHz bandwidth instead of 20 MHz for 802.11a. More details on the 802.11 channel access schemes is referred to in [7].
Multichannel operation is specified in IEEE Std 1609.4. In the multichannel framework, a control channel (CCH) is to be used exclusively for road safety messages and service announcements, while the other channels are service channels (SCH). It is required that all WAVE devices need to monitor CCH at regular intervals. To account for the devices that can not simultaneously monitor CCH and SCH, synchronization procedure has been proposed to coordinate the channel using time-division multiplexing [14]. A synchronization interval comprises a CCH interval, a SCH interval, and two guard intervals.
2.2. Channel Access in 802.11p Standard
For each Access Category (AC), an enhanced distributed coordination access (EDCA) process will be started to contend for transmission opportunities (TXOPs) using a set of distinct EDCA parameters, including arbitration interframe space (AIFS) instead of DIFS in DCF. AIFS(AC) is determined by AIFS(AC) = SIFS + AIFSN(AC), where AIFSN(AC) is an integer indication of the number of slots that a station belonging to AC should defer before either invoking a backoff or starting a transmission after a SIFS duration. AC values of 0, 1, 2, and 3 present background, best effort, video, and voice, as shown in Table 1, respectively.
Default EDCA parameter set.

3. Adaptive Control Scheme
In this section, we present a two-level adaptive control scheme for the coexisting safety and non-safety applications. For the safety applications, we consider both emergency and routine safety applications. We take a road intersection as an example network scenario where a fixed roadside AP has the full control of setting for the CCH interval and other system parameters. In the first level, the time allocated to the CCH and the SCH is controlled and adapted according to traffic loads in a relatively long-time scale. In the second level, adaptive congestion control is applied to the CCH in a relatively short-time scale. The objectives of the design are to ensure QoS of high priority ESA messages while maximizing channel utilization for low priority PSA messages and non-safety applications. The reason to maximize channel utilization for low priority PSA messages is that low priority PSA applications which coexist with ESA application over the DSRC control channel are also important for CSA. For example, periodically broadcasted PSA messages which include vehicle positions enable mutual awareness.
There are two major parts included in the adaptive control scheme. The first part is an offline procedure to find out the optimal configurations of CCH interval, message rate, and backoff exponent (BE) for a set of QoS requirements and given number of vehicles. These optimal configurations are then applied in the second part where the roadside AP requests the vehicles to update the configurations according to the QoS requirements and an estimated number of vehicles in the road intersection.
It is noted that in addition to the control of CCH interval and message rate, a MAC layer blocking mechanism is used by all the vehicles for safety applications [10]. The MAC layer blocking mechanism is used to immediately block low priority PSA messages by a vehicle if it detects that the channel is busy for longer than a channel busy threshold in any CCH interval. The proposed adaptive control scheme is implemented in a centralized manner. This is different from traditional network congestion control protocols such as TCP and TFRC protocols, which control only the packet transmission rate and are implemented in a distributed approach at the transport layer. The proposed method is also different from distributed rate adaptation method proposed in [10] as the AP can fully control the system configurations for the vehicles in the road intersection.
3.1. Offline Determination of Optimal Configurations
To facilitate the adaptive control, we use an offline simulation-based approach to find out the best possible configurations of CCH interval, safety message rate, and channel access parameters for given combinations of and safety QoS requirements (e.g., message successful probability and message delivery delay) and the number of vehicles.
Here offline simulation approach means determination of optimal configurations by simulation of a system that is not in operation, which is contrast to the approach that may be used to adaptively find the proper configurations from the real system in operation. A simulator is developed for this purpose. Although it is possible to use analytical models to determine the optimal configurations, we believe the analytical models may not be efficient to take into account the complex system operations and parameters, such as unsaturated traffic load, MAC layer backoff, and blocking.
A challenge on the determination of optimal configuration is the multiple objectives optimization for the whole vehicle network, namely, provisioning of high available channel for ESA messages and high channel utilization for PSA messages, and leaving more channel time to non-safety applications. For example, a low PSA message rate will present higher channel availability to ESA messages but at the cost of less transmitted PSA messages. To tackle the multiple objective optimization problem, we use a utility function to find out the combination of BE, message rate, and the minimal CCH interval which can satisfied the specific QoS. In the proposed utility function, the performance metrics of message success probability, average transmit delay, and transmit rate are taken into account. It is noted that there could be alternative utility functions defined for the multiple objective optimization problem. Investigation of alternative utility functions is left for our future work.
Let

where
The threshold function

The reason that the threshold function is used is that for some given QoS requirements on the ESA and PSA applications, we want to maintain a message success probability larger than the message success threshold, a message delivery delay smaller than the delay thresholds and an average transmit rate larger than the rate threshold. If the requirement on one service metric (message success probability or delivery delay) is not satisfied, value
With the preset parameters, we can determine a configuration table which gives the minimal CCH interval and the optimal configuration of message rate, and BE which meet given QoS requirements with various number of vehicles in the network. Note that the determination of the optimal configurations is only needed at the roadside AP.
3.2. Online Adaptation of Configurations
In this procedure, the AP applies the findings from the offline procedure on the minimal CCH interval and the optimal configurations of message rate for PSA applications. The procedure operates as follows. Firstly, the AP estimates the number of vehicles (
4. Numerical Result
We have built a discrete event-driven simulator to evaluate the performance of the adaptive control scheme for DSRC vehicle networks. All vehicles are located with uniform distribution along the roads at a junction and a roadside; AP is located at the center of the junction. We assume a single hop ad hoc network in which each vehicle can hear transmissions from other vehicles. For simplicity, we assume there are two classes of vehicles in the network. The first class of vehicles transmit only ESA messages while the second class of vehicles transmit only PSA messages. Message block event at MAC layer is triggered to provide high available bandwidth for ESA messages with a MAC blocking threshold of 70% in a single SI. Performance for MAC blocking thresholds of 50% and 90% is also investigated in the simulations. For simplicity, we assume that there are three first-class vehicles, which periodically send eight ESA messages per second. All safety messages have the same length of 250 bytes and are broadcasted at the rate of 3 Mbps. An ideal channel is assumed where a message can be successfully received if no collision happens.
We have used the following configurations for the thresholds in the proposed utility function:
With the above parameter configurations, we obtained the optimal configuration of message rate, BE, and CCH interval length. The minimal CCH interval length satisfying the preset QoS requirements and the corresponding optimal configurations of BE and message rate is plotted against the number of vehicles in Figures 1, 2, and 3, respectively. The preset QoS requirements are with message success probability

Minimal CCH interval satisfying the preset QoS requirements with
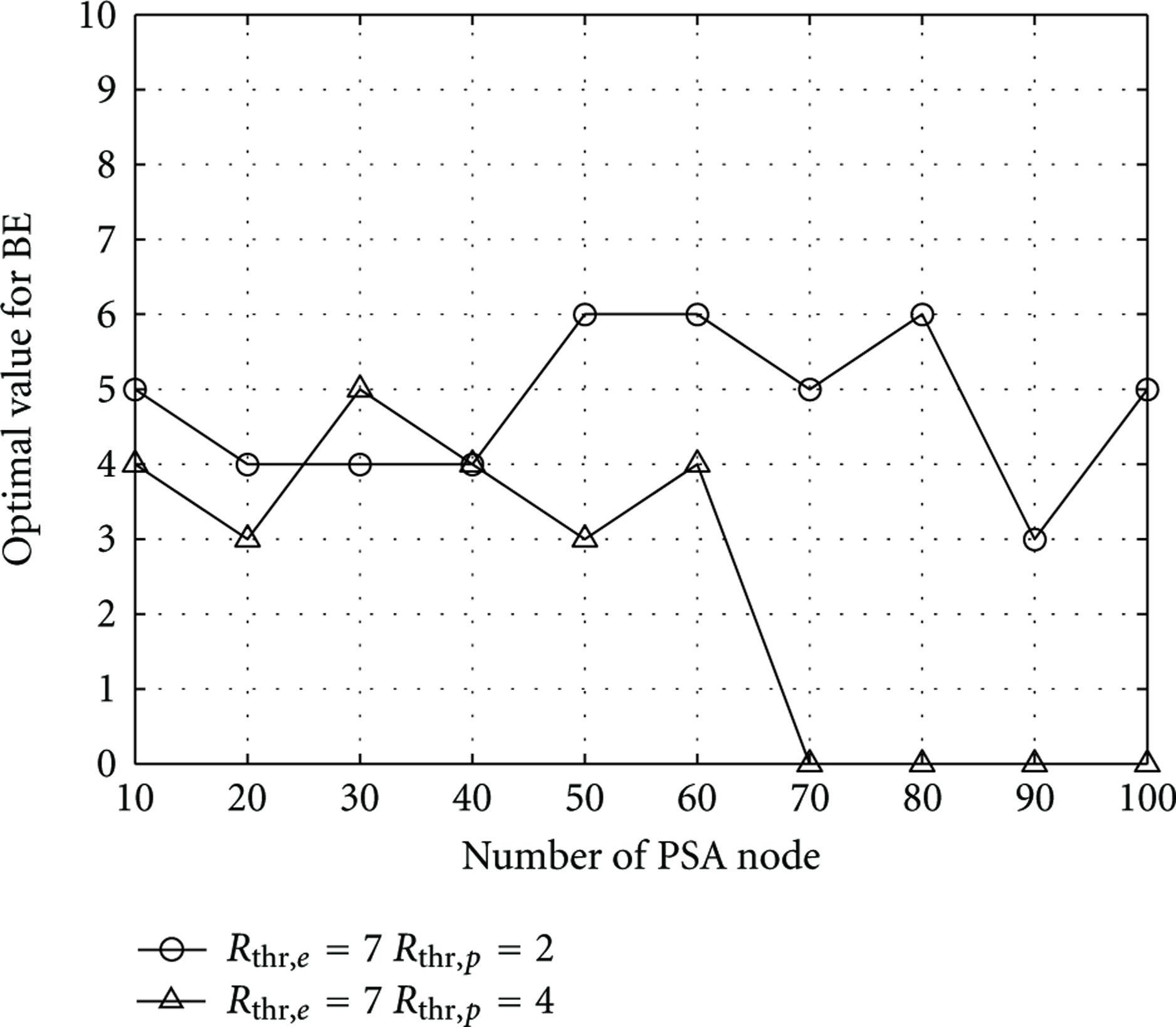
Optimal BE against the number of PSA vehicles with

Optimal message rate against the number of PSA vehicles with
It can be observed from Figure 3 that message rate must be at least 5 messages per second to satisfy the QoS requirement
Figures 4 and 5 present the performances of message success probability and delivery delay under the QoS requirement of

Message success probability against the number of PSA vehicles with

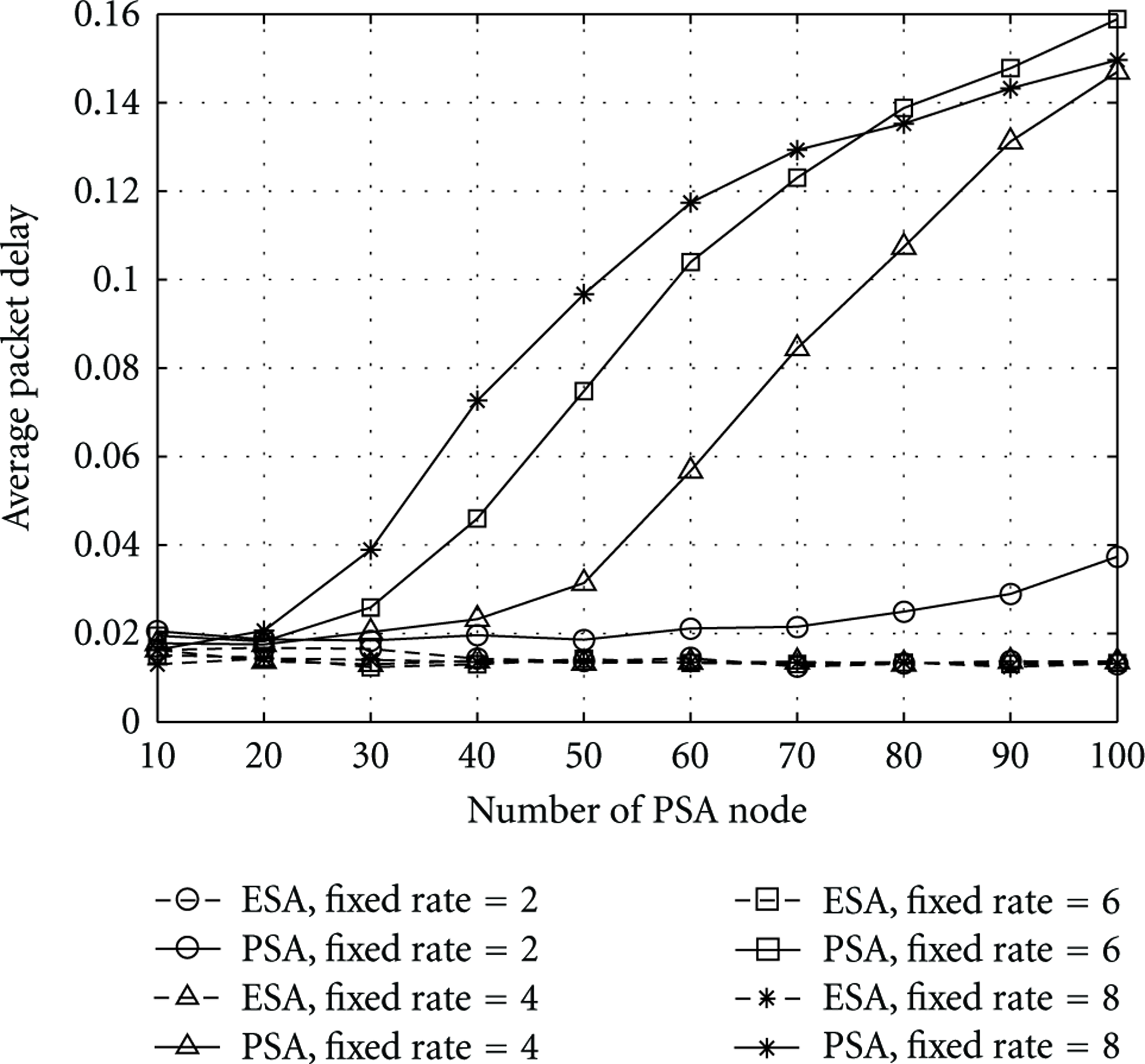
Message delivery delay against the number of PSA vehicles with
We plot the utility value

Utility
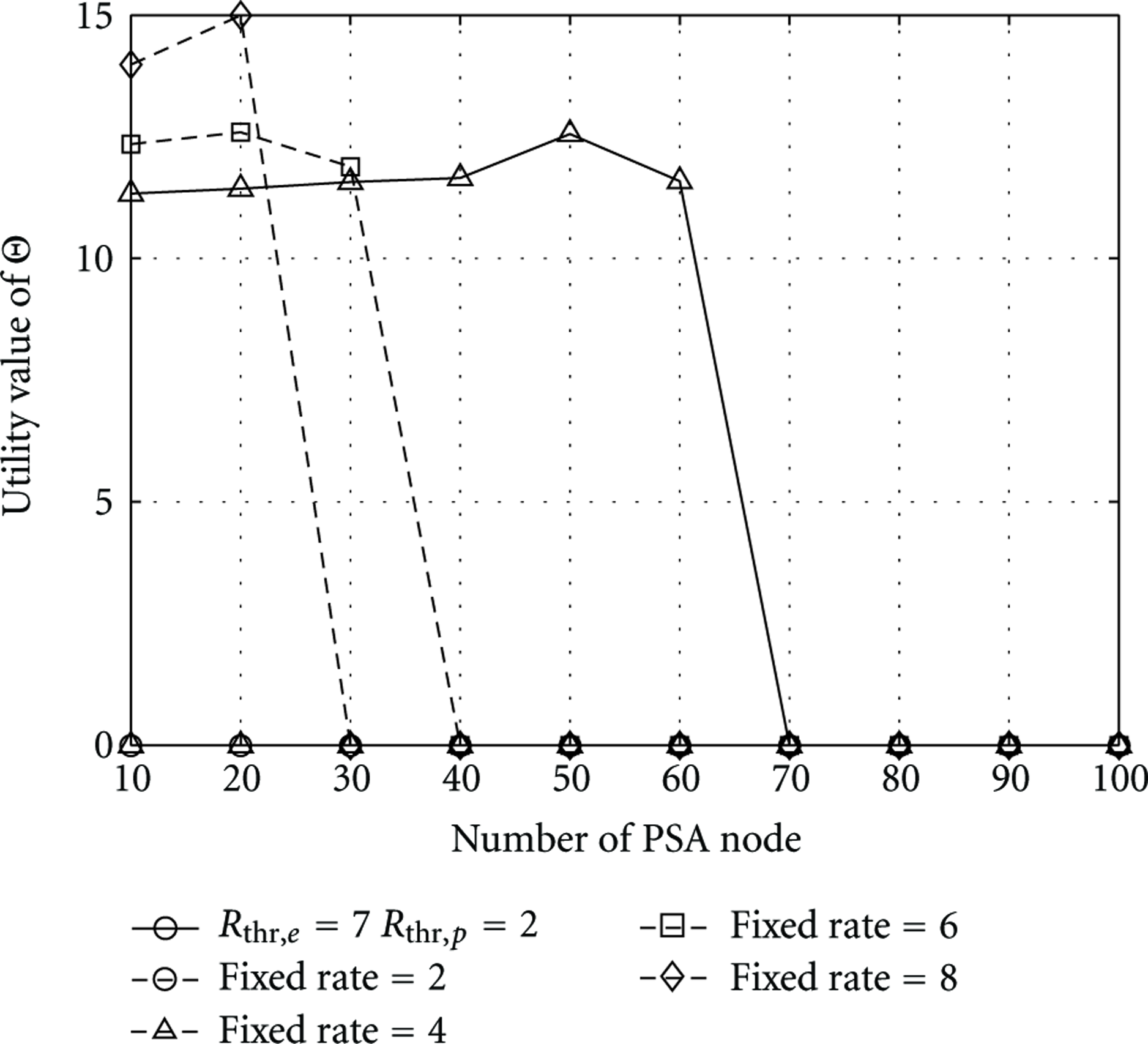
Utility
Message delay of Type I FCS.

Message success probability of Type I FCS.
Next we compare the performance of the adaptive control scheme with that of another type of fixed control scheme (called Type II FCS), which uses the CCH interval length identified in the adaptive control scheme but uses fixed message rate for PSA. The utility values of the adaptive control scheme and the Type II FCS are plotted in Figures 10 and 11 for the QoS requirements of
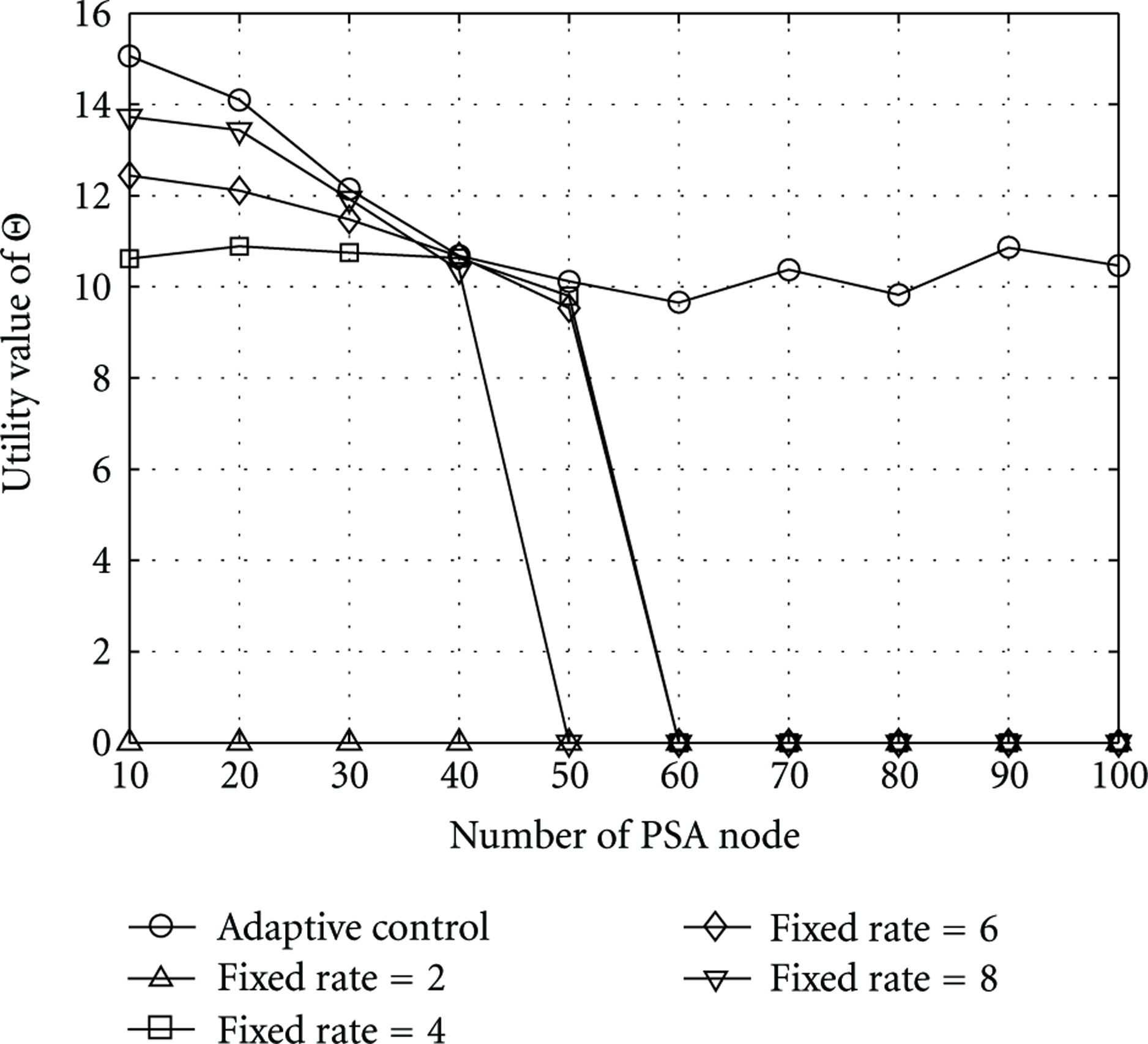
Utility

Utility

Optimal message rate of adaptive control scheme.
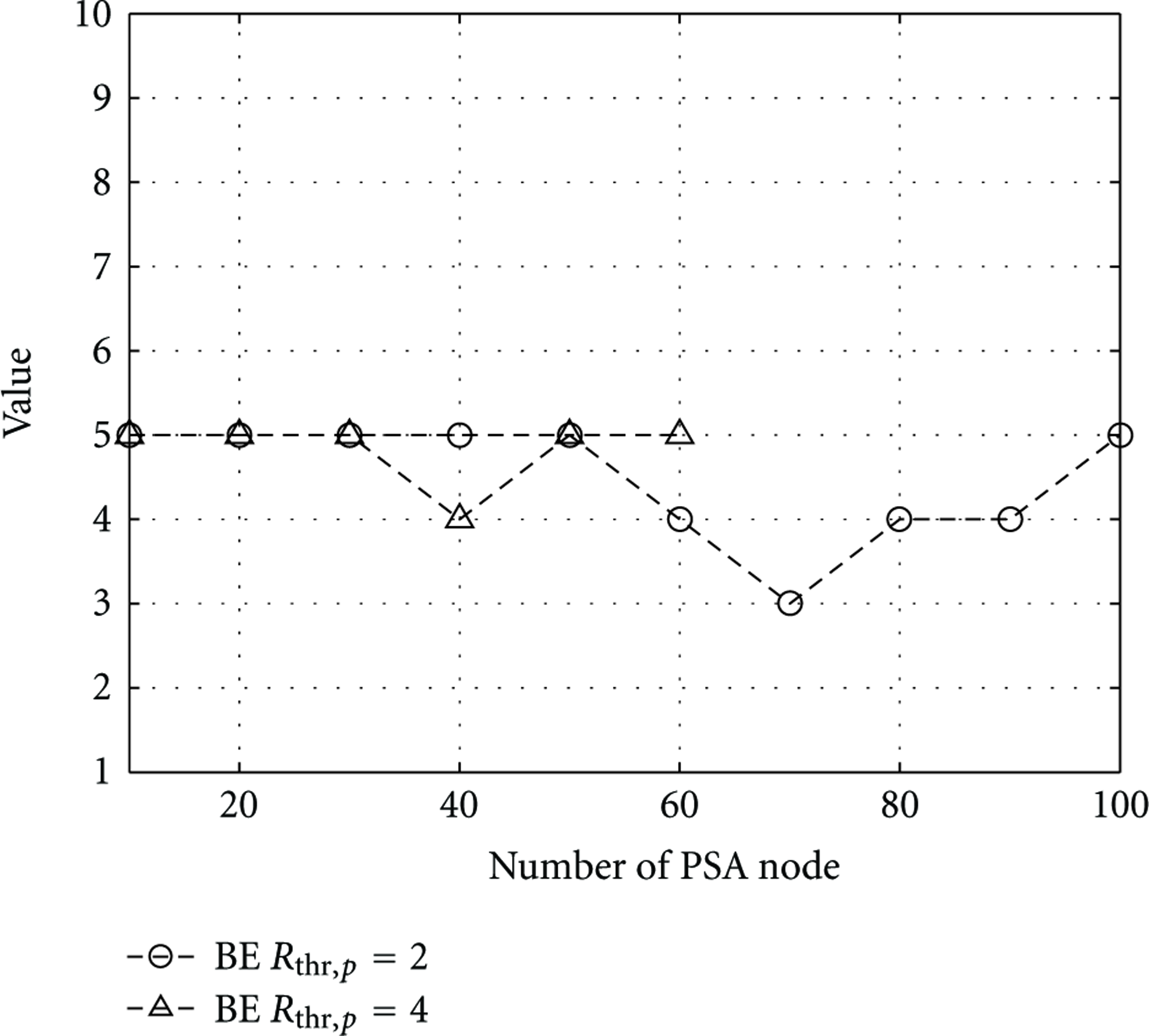
Optimal BE of adaptive control scheme.
It can be observed from Figure 12 that with less vehicles in the network, message rate can reach as high as 10, and still meet the QoS requirement, and BE maintains stable relatively. With the number of vehicle increasing, message rate is as low as 3, and BE becomes unstable when
5. Conclusion
In this paper, we investigated a system control issue faced by the coexisting safety and non-safety application deployed over DSRC vehicle networks. A two-levels adaptive control scheme was proposed with one level on CCH interval control and the other level on message rate and channel access control. The objective is to ensure QoS requirements for safety applications while leaving as much bandwidth as possible for non-safety applications. An offline procedure is used to determine the optimal configurations of CCH interval, safety message rate, and channel access parameters. A utility function is proposed to solve the multiobjectives optimization problem and take the safety application QoS into account. The identified configurations are applied online by the roadside AP according to the estimated number of vehicles. Results demonstrate that the adaptive control scheme significantly improves system performances over the fixed control scheme with changing number of vehicles and QoS requirements from the road safety applications.
Footnotes
Acknowledgments
The work is supported by the UK Engineering and Physical Sciences Research Council (EPSRC) with Grant Reference no. EP/1010157/1 and the National Natural Science Foundation of China (NSFC) under the Grant no. 61103177.