
Abstract
To plan the data collecting path for the mobile collector in wireless sensor network (WSN), an efficient energy-aware distributed intelligent data gathering algorithm (DIDGA) is proposed, which includes cluster formation and path formation phases. In cluster formation phase, an energy-efficient distributed clustering scheme is proposed to form a coverage-efficient WSN, which constructs a minimum connected dominating set (MCDS) based on maximal independent sets (MISs) in distributed and localized manner, and the node with more power is selected to be the cluster head in turn to prolong the network lifetime. In path formation phase, a path formation optimized algorithm (PFOA) is proposed to resolve the path formation NP problem with dynamic requirements. Then DIDGA uses the cluster head relay mechanism for planning the data gathering path. Compared with existed algorithms, detailed simulation results show that the proposed DIDGA can reduce average hop counts, average data gathering time, energy consumption, increase the efficiency of event detection ratio and prolong the network lifetime.
1. Introduction
Recent advances in wireless communications and electronics have enabled the development of low-cost, low-power, multifunctional sensor nodes [1], which consist of sensed and data processing, and communicating components, leverage the idea of wireless sensor networks (WSNs) [1, 2]. Typical applications of WSNs are the unmanned environmental monitoring, military surveillance, unmanned health monitoring, target tracking, inventory management, multimedia transmitting, and so on [3, 4]. Considering that battery is the main source of energy for the sensor nodes, how to reduce the high-energy expenditure in multihop routing and extend WSN's lifetime is a major challenge [2, 4].
One important task of WSNs is to collect useful information from the sensory field [5]. For a large-scale, data centric sensor network, it is inefficient to use a single, static data sink to gather data from all sensors [6, 7]. In some applications, sensors are deployed to monitor separate areas. In each area, sensors are densely deployed and connected, while sensors that belong to different areas may be disconnected. Unlike fully connected networks, some sensors cannot forward data to the data sink via wireless links [8, 9]. In some complex terrain environment, especially in noise interference and mobile case, how to effectively gather data is a challenge task with limited power. In general, most data-gathering schemes aim to prolong lifetime of WSNs by saving power consumption and optimized data transmitting scheme [9]. In [10], the minimal aggregation time (MAT) NP-hard problem with collision-free transmission was studied, where a sensor can not receive any data if more than one sensor within its transmission range sends data at the same time. Another important way to save energy is to decrease data transmitting with some schemes, such as gathering correlated data [11], or compressing the data [12]. However, to some extend, such schemes are complex and only suitable in certain specific situations.
In actual monitoring environment, the shelter, noise interference, and complex terrain will degrade the performance of data-gathering schemes [13–16]. However, a mobile data collector is perfectly suited to such applications [17, 18]. More recently, the use of the mobile robot to collect data has been explored for improving the networking facilities in the system [19, 20]. A mobile entity [21] was proposed to pick up data from sensor nodes, where sensor nodes transmit data only over a short range that requires less transmission power. The objective of such research mentioned above is meant for reducing the communication energy required at the sensor nodes and to maximize the sensor network lifetime. But significant challenges are encountered how to design the data-gathering path for the mobile robot and how to improve the efficiency of data-gathering with the help of mobile robots [22–24]. In the path planning of the mobile robot, it is an NP-hard problem [2, 25] to find the shortest path, and in large-scale wireless sensor network, the latency of the data will be large and too. Moreover, there is much research about the problem of planning a path which can be the complete coverage in an environment by a mobile robot. Commonly, the methods are spiral path and straight rows path with backtracking to assure the whole network is visited. These navigation methods are very simple but not very efficient. In [26], a number of mobile collectors, called data mules, traverse the sensed field along parallel straight lines and gather data from sensors. However, in practice, data mules may not always be able to move along straight lines, for example, obstacles or boundaries may block the moving paths of data mules. Moreover, the performance and the cost of the data mule scheme depend on the number of data mules and the distribution of sensors. When only a small number of data mules are available and not all sensors are connected, data mules may not cover all the sensors in the network if they only move along straight lines. Another problem is that the existed mobile data-gathering scheme doesn't consider the worst-case delay and time-limited data for entire data-gathering. This can further cause buffer overflow and delay in the agents and reducing the reliability of data collection.
In this paper, the intelligent mobile data collector has been explored to collect data for improving the networking facilities in the system. To improve the efficiency of data collecting, an efficient energy-aware distributed intelligent data-gathering algorithm (DIDGA) is proposed to plan the data-gathering path for the mobile collector in WSNs. DIDGA will reduce high energy expenditure in multihop routings and increase the efficiency of the mobile collector to gather data. The main contributions of DIDGA may be summarized as follows:
DIDGA creates and constructs a minimum connected dominating set (MCDS) based on maximal independent sets (MISs) in distributed and localized manner, which will reduce high energy expenditure in multihop routing with the cluster head, and it will select the node with more power to be the cluster head in turn to prolong the network lifetime. Then DIDGA restricts to the hop counts of the sensed data transmission by communicating with the cluster head in one hop. Sensor nodes' data transmission can cooperate with mobile collector's data-gathering path, which will increase the efficiency of the mobile collector to collect data. DIDGA disperses routing hot spots in WSNs. So it extends the network's lifetime. DIDGA considers the path formation NP problem with dynamic requirements under dynamic network environment. The characteristics of the problem are described in terms of sink, the high priority cluster header with urgent event, and the time-limited data between requirement nodes. A path formation optimized algorithm (PFOA) is proposed which combines ant colony algorithm and evolutionary algorithm to satisfy the constraints. Then DIDGA uses the cluster head relay mechanism for planning the data-gathering path. For the delay constraint event and time critical data, the collector will report it to sink directly. The path formation scheme will meet the requirements of cluster headers with less-power and real-time urgent events in practical applications.
The remainder of this paper is organized as follows. In Section 2, we discuss some related studies. Section 3 describes the details of the proposed data-gathering algorithm. Section 4 presents and assesses the simulation results. Finally, Section 5 concludes the paper.
2. Related Work
In practice, the network performance is degraded by the complex monitoring terrain, multihop, and interference and time-varying property of the wireless channel [21]. To make effective use of the gigantic amount of individual sensor readings, it is essential to equip WSNs with scalable and energy-efficient data-gathering mechanisms. Some distinct characteristics of WSNs, such as large node density, unattended operation mode, high dynamicity and severe resource constraints, pose a number of design challenges on sensor data-gathering schemes. Many research activities have been carried out on the research issue. Since the fundamental task of WSN is to gather data efficiently with less resource consumption, to address the problem, there are two threads of research to improve the performance of data collecting: optimized data-gathering schemes and mobile collector assisted data-gathering in WSNs.
For the first thread, most data-gathering algorithms aim to prolong lifetime with some optimized schemes. The balance energy consumption problem was formulated as an optimal transmitting data distribution problem [9] and minimal aggregation time (MAT) problem [10] are formulated as optimal problems. In [27], the construction of a data-gathering tree to maximize the network lifetime was studied, and the problem is also shown to be NP-complete. To balance load within each cluster, an even energy dissipation protocol (EEDP) was proposed for efficient cluster-based data-gathering in WSNs [24]. The method proposed in [28] gathers data in high-density WSNs in real-time, which determines network topology by hierarchical clustering to avoid radio collision and enables to gather data with minimum data latency from numerous high-density sensor nodes. To address the problem of gathering information in WSNs, the work in [29] took into account the fact that interference can occur at the reception of a message at the receiver sensor. However it assumes the distribution of sources are known. Another way to save energy is to decrease data transmitting with some schemes. A new distributed framework to achieve minimum energy data-gathering was proposed in [11]. To minimize the total energy for compressing and transporting information, the problem of constructing a data-gathering tree over a WSN was studied in [12]. And a tunable data compression technique was proposed in [30]. In fact, the schemes mentioned above have some defects for actual environment. To some extent, all those schemes require the node has extra computation to optimize the data transmission or compress and decompress data.
For the second thread, nodes in WSNs are in multihop and mobile environment in general. The characteristic of each link will change timely. In the content of the WSNs where each node only has a partial view of the network, it is very important for each node to estimate the system status by a simple and accurate method [21, 23]. Especially for data transmission with less power consumption, a mobile data collector is more perfectly suited to such applications, for the collector can be equipped with a powerful transceiver and battery. Instead, it is effective to collect data by assisted mobile collector which can achieve better power saving performance [22, 24, 26]. A new data-gathering mechanism called M-collector for large-scale wireless sensor networks was proposed in [31] by introducing mobility into the network. However, it just considers the single-hop data-gathering problem. An adaptive data-gathering protocol was proposed in [32] that employs multiple mobile collectors (instead of sinks) to help an existing WSN achieve such requirements, which adopts a virtual elastic-force model to help mobile collectors adjust their moving speed and direction while adapting to changes within the network. However, the number of collectors can not be predefined, for the irregularity of the information generation rate as well as the cost of mobile collectors. A well-planned adaptive moving strategy (AMS) for a mobile sink in large-scale, hierarchical sensor networks was presented in [33]. The mobile sink traverses the entire network uploading the sensed data from cluster heads in time-driven scenarios. However, it just tries to minimize the whole tour length to save energy. An efficient hybrid method for message relaying and load balancing was proposed in low-mobility wireless sensor networks in [34]. The system uses either a single-hop transmission to a nearby mobile sink or a multihop transmission to a far-away fixed node depending on the predicted sink mobility pattern. Another problem is that the existed mobile data-gathering scheme didn't consider the worst-case delay and time-limited data for entire data-gathering in practical dynamic monitoring environment.
3. Proposed Scheme
3.1. System Model
A distributed WSN is modeled as an undirected graph
In a distributed WSN, resource-constrained sensor node

An example of the system.
In order to gather data effectively, the proposed data-gathering algorithm should address two important fundamental problems: cluster formation and path formation.
Cluster formation one of the crucial challenges in the data-gathering of WSN, is energy efficiency. Cluster-based network organizations are considered to be the most favorable approach in terms of energy efficiency. In this approach, sensor nodes are organized into clusters, and one sensor node
Path formation: From time to time, the mobile collector needs to conduct data-gathering in the WSN by traversing each cluster. The mobile collector will leave from one node, and visit any cluster header
3.2. Cluster Formation
In the proposed DIDGA, we assume that the sensor nodes are randomly scattered over the network. The cluster formation scheme will be done using the distributed manner, as explained below.
In order to decrease the path length of the mobile collector, the sensor nodes first probe the network and MCDS will be constructed in a distributed way. The proposed cluster formation method exploits the localized network structure and the remaining energy of neighboring nodes in order to define a new way for estimating dynamically the cluster heads.
Definition 1.
A subset S of V is a dominating set (DS) if each node
Definition 2.
A subset C of V is a connected dominating set (CDS) if C is a dominating set and C induces a connected subgraph.
In the CDS, the nodes in C can communicate with any other node in the same set without using nodes in
Definition 3.
A subset
An MIS is a maximum cardinality subset
Algorithm 1: MIS construction algorithm.
After the MIS construction, the MCDS construction algorithm is shown as in Algorithm 2. Then each cluster header generates a REQ_HEADER message to find all other cluster headers within three hops. This message is broadcasted at most three hops before it arrives at a cluster header. When a cluster member receives this message, it appends its ID into the node list included in the REQ_HEADER message and then broadcasts this message. In this way, when a REQ_HEADER message arrives at a cluster header, it has already recorded the IDs of all nodes in its node list which form the path from the cluster header originating this message to the cluster header receiving this message. When a cluster header receives a REQ_HEADER message for the first time from another cluster header, it generates a REPLY_CON message including the path that this message should visit and sends this message. This path is the reverse order of the one in the REQ_HEADER message that it has received before. When a cluster member's ID that is included in the path of the REPLY_CON message receives this REPLY_CON message, it changes its state to connector and sends this message to the next-hop node according to the path in this message.
REQ_HEADER.nodeList;
REQ HEADER of REQ_HEADER.nodeList;
REQ_HEADER AND ID of vk∈ REPLY_CON.nodeList node in REPLY_CON.nodeList;
Algorithm 2: MCDS construction algorithm.
Lemma 1.
For every cluster member node
Proof.
Let S denote a set of cluster header nodes in one-hop neighbors of node
Lemma 2.
Let
Proof.
Since D is an independent set, by Lemma 1, no vertex in
Theorem 1.
The distributed algorithm for constructing an MCDS has a constant approximation factor of MCDS in G.
Proof.
From Lemmas 1 and 2, we can demonstrate this theorem instantly.
The MCDS algorithm formulates a certain number of clusters. As being a cluster head is much more energy intensive than being a cluster member node, this requires that each node take its turn as cluster head to prolong network lifetime. Assumption that each sensor node

Ensuring that all nodes are cluster heads the same number of times requires each node to be a cluster head once in

If

The expected number of nodes that have not been cluster heads in the first r rounds is

This ensures that the energy at all nodes is approximately equal to each other after every

Assume that the energy of each sensor equipped is E. To transmit l bits message with distance d, the radio expands

To receive l bits message with distance d, the radio expands

Assume that there are N nodes distributed uniformly in an

Each cluster member node just needs to transmit its data to the cluster head with energy

Assume that the cluster head is at the center of mass of the cluster and the radium is R, then we can get the energy

Then the total energy

Then we can get the optimum number

3.3. Path Formation
The main objective of DIDGA is to improve the efficiency of the data-gathering by the mobile collector using the cluster header to relay sensed data. The data of a sensor node
In DIDGA, it is assumed that the network is composed of large number of nodes, which are uniformly deployed over a rectangular area and each sensor node has a unique ID and location information. Assume that the maximal range for the direct communication of the sensor node's radio signal is

In DIDGA, we assume that the data-gathering path of the mobile collector is random. Before executing the proposed DIDGA algorithm, the mobile collector will perform initial phase. If the locations of sensor nodes are not known in advance, the mobile collector has to traverse the whole sensed field along an exploring path to discover nodes' locations. This procedure has to be executed in the initial deployment and whenever the sink detects that some part of the network has been accidentally destroyed. When exploring the sensed field and whenever a sensor node is encountered, the mobile collector can instruct the sensor node to communicate with the other nodes inside the same MCDS to discover these nodes. In the initial phase, the nodes with the range of the mobile collector will receive the control message directly. Then the sensor nodes will send the location and IDs information of the cluster headers to the collector. After receiving the information, the collector can move to one of the cluster header to gather data and to form the moving path.
With the location information obtained from the initial phase, the mobile collector has to form an optimized path to gather sensed data. In such a scenario, if sensors with huge data attract the mobile collector for a long-time period, data will be dropped from the cache by sensors at the end of the tour in order to accommodate new data. And sensors with urgent event should be visited first. Although network energy is saved in such schemes, quality of services is reduced in terms of response time. Thus, in order to avoid high latency and lost high priority data, an optimized data collection method with the lowest possible latency requirement are necessary to keep the network working at an acceptable quality of service level.
In some applications, sensed data should be delivered to the users according to specific requirements given such as data reporting intervals. The property of such requirements can be either dynamic or static. For the dynamic case, the user will control the sensors' behavior by sending some information depending on the environmental situation or the analysis of sensed data already delivered. For the static case, the sensors may have to decide on the importance of sensed data based on the requirements initially given. For a time critical situation, the sensor network should focus on meeting a delay constraint even though energy consumption is relatively high. Therefore, DIDGA should be able to flexibly adapt to the varying users' requirements while maximizing energy conservation for the network longevity. DIDGA helps sensors to maximize energy conservation in reporting their sensed data by providing two types of data forwarding link: data relay link and direct link.
In this paper, we consider the NP path formation problem with dynamic requirements under dynamic network environment. The characteristics of the problem can be described in terms of sink, the high priority cluster header with urgent event, and the time dependent between requirement nodes. The mobile collector has to send the time-limited data to the sink before the end of the event expired. Every requirement node has its own time window. The mobile collector is allowed to arrive at a requirement node outside of the time interval defined for service. However, there would be a penalty when the arriving time of the mobile collector violates the time window. On one hand, the running time
Notations.

The value of
The proposed path formation scheme is formulated as follows:


where the waiting times and excess duration caused by the violation of time windows or departure time plan are defined in the following and can be easily calculated once the first-stage decision is determined and the stochastic travel times are realized. Note that symbol
The objective (15) is to minimize the weighted sum of expected travel time, expected waiting time, and expected penalties, which will meet the requirements of cluster headers with less power and high priority data. Considering the ant colony algorithms have the characteristic of good local searching capability while the evolutionary algorithms have fairly good global searching performance and, to solve (15), the proposed path formation optimized algorithm (PFOA) combines ant colony algorithm and evolutionary algorithm so as to satisfy the constraints. Herein, the solution PFOA algorithm is formally proposed as in Algorithm 3.
colony algorithm, and the population size colony algorithm; evolutionary algorithm, the population size evolutionary algorithm; algorithm, update Pareto candidate solution set;
algorithm; algorithm;
Algorithm 3: Path formation optimized algorithm.
From the Algorithm 3, we know that the best path is determined by the current pheromone matrix. So the update way of the pheromone matrix will affect the efficiency of PFOA. Pheromone will be updated by a process of global update given as follows:

where
current generation EM−1 individuals; EM− 1 individuals; generations as the new population;
Algorithm 4: Pheromone matrix optimized algorithm.
When evaluating individual in the algorithm, we generate ants and calculate the pareto-dominate relationship between ants and the set of pareto candidate solution. When an ant is generated, no matter generated by evolutionary algorithm or generated during the iterating process of ant colony algorithms, the updating strategy of pareto candidate solution set remains the same. That is, if the ant is not dominated by any individual in the set, and the pareto candidate solution set is not full, add it into the set; otherwise, if the ant is not dominated but the set is full, it will be replaced with the closest candidate solution from this ant by Hamming distance.
First, we defined a relation sequence
For path
After determining the data-gathering path for the mobile collector with the help of the sensor nodes with distributed manner, the mobile collector performs the proposed DIDGA that is shown as in Algorithm 5.
optimized Algorithm 4;
Algorithm 5: Distributed intelligent data-gathering algorithm.
In the system, the sensed data is classified in two types: critical and noncritical data. For critical data, an expiration time
4. Simulation Results
In order to evaluate the performance of the proposed DIDGA algorithm, we implemented the DIDGA in the well-known simulation tool NS-2 [35], the well-planned adaptive moving strategy (AMS) in [33] and the algorithm without mobile collector (WMC) are simulated as discussed here. Our simulation is performed considering the deployed region as a square of fixed area of 1000 m × 1000 m. In order to avoid the communication holes among the nodes in the network, the distance between any two nodes are maintained as
In the experimental system, we assume the dynamic requirement of sensor node follows the Poisson process. The dynamic requirement R of customers includes three types:
4.1. Validation of Path Formation
In order to explore the weights of χ and δ of influence on path length, Figure 2 shows the results of total path length with varying weights χ and δ, where the number of nodes is 1200. We can see that χ and δ have some influence on the path length, because mobile collector will change the path when the cluster headers' waiting time and collector's waiting time vary, and the collector has to take the priority of cluster header with time-limited data and less power into consideration. And it is difficult to obtain the optimized path length. Hence, we can only get the suboptimal path length with the appropriate χ and δ. In the following scenarios, we set the values of χ and δ as 0.34 and 0.67, respectively.

Path length with varying weights.
With the number of nodes increasing, the path length of two schemes will increase obviously. When the number of nodes increases from 800 to 1600, the path length of AMS increases to 4367 m, which is slightly lower than that of DIDGA. We can see that the path length of DIDGA always is slightly higher than that of AMS. The reason is that the objective of the path formation is to minimize the weighted sum of collector's running time, cluster headers' waiting time, and collector's waiting time for the given constrained conditions. So in path formation scheme, DIDGA considers the dynamic requirements such as high priority urgent event, data reporting intervals, and the time critical situation into consideration. Such constrains slightly increase the total length of mobile collector to gather data.
In Figure 3, the total path length of different algorithms is shown. With the number of nodes increasing, the path length of two schemes will increase obviously. When the number of nodes increases from 800 to 1600, the path length of AMS increases to 4367 m, which is slightly lower than that of DIDGA. We can see that the path length of DIDGA always is slightly higher than that of AMS. The reason is that the objective of the path formation is to minimize the weighted sum of collector's running time, cluster headers' waiting time, and collector's waiting time for the given constrained conditions. So in path formation scheme, DIDGA considers the dynamic requirements such as high priority urgent event, data reporting intervals, and the time critical situation into consideration. Such constrains slightly increase the total length of mobile collector to gather data.

Path length of different algorithms.
Figure 4 shows the data-gathering time by different schemes when the number of nodes varies from 800 to 1600. We compare three schemes: without mobile collector (WMC), the adaptive moving strategy (AMS), and DIDGA. It can be seen that data-gathering time of all the schemes increases as number of nodes increases. For WMC, the average data-gathering time increases greatly, from 1740 s (800 nodes) to 4521 s (1600 nodes). The reason is that the sink must wait the relayed data by nodes as the number of nodes increasing, which will increase the data-gathering time obviously. However, DIDGA always outperforms other schemes due to the concurrent use of the mobile collector and simultaneous data uploading among sensors with the support of cluster headers. For instance, it achieves 73% time saving compared with WMC scheme when number of nodes is 1600. Shorter data-gathering time leads to longer network lifetime since sensors can turn to power-saving mode once the data-gathering in their region is done. We also notice that the advantage of DIDGA over AMS becomes more evident when the network becomes denser with more sensors. This is reasonable because more sensors would provide more opportunities to utilize cluster headers for concurrent data uploading.

Average data-gathering time of different algorithms.
4.2. Validation of DIDGA
Figure 5 shows the results of average hop counts for different schemes with different node numbers. As shown in Figure 5, it is observed that DIDGA outperforms in terms of average hop counts irrespective of the position of the sink. For DIDGA, the average hop count keeps about 4.7, while for WMC and AMS, the average hop count is 20.1, 8.7. It is noticed that the number of nodes has a great impact on the average hop counts for WMC. It is reasonable since more nodes mean that the sensed data will be relayed by more hops. On the contrary, when the number of nodes is large, the impact of node number on average hop counts is not obvious for DIDGA. For example, when the number of nodes increases to 1600, the average hop count of DIDGA just increases to 4.7, which is smaller than that of AMS about 5.8. The reason is that all sensor nodes will form clusters and just need to relay the sensed data to the cluster headers, so the average hop counts are not affected by node numbers.

Average hop counts with different algorithms.
In order to show the overall trend of energy consumption, we sorted the remaining energy levels collected from each cluster member and cluster head. Figures 6 and 7 show the comparison results of remaining energy level of each sensor and cluster head for AMS, WMC, and the proposed DIDGA, respectively. As shown in Figures 6 and 7, it is observed that the proposed DIDGA outperforms in terms of remaining energy irrespective of the number of cluster nodes or cluster headers. The remaining energy level of WMC is obviously lower than that of DIDGA. Because that the nodes have to relay sensed data to the sink. For the algorithm AMS, the remaining energy increases to 0.92 when the number of cluster members increases to 1200, while for DIDGA, the remaining energy of DIDGA is 0.952. The reason is that the sensor nodes just need to send their packets to its neighbor cluster header to save energy. And the proposed scheme not only considers nodes topology, energy information but also hop distance to known nodes, and it uses mobile collector to gather data. As mentioned previously, the radio range is a factor affecting the transmission distance which is proportional to the energy consumption. Thus, we can observe that Figure 6 shows a much higher energy-savings compared to the one in Figure 5. In order to meet the delay constraint, some cluster members have to use more energy using the direct link even though they have a data relay point.
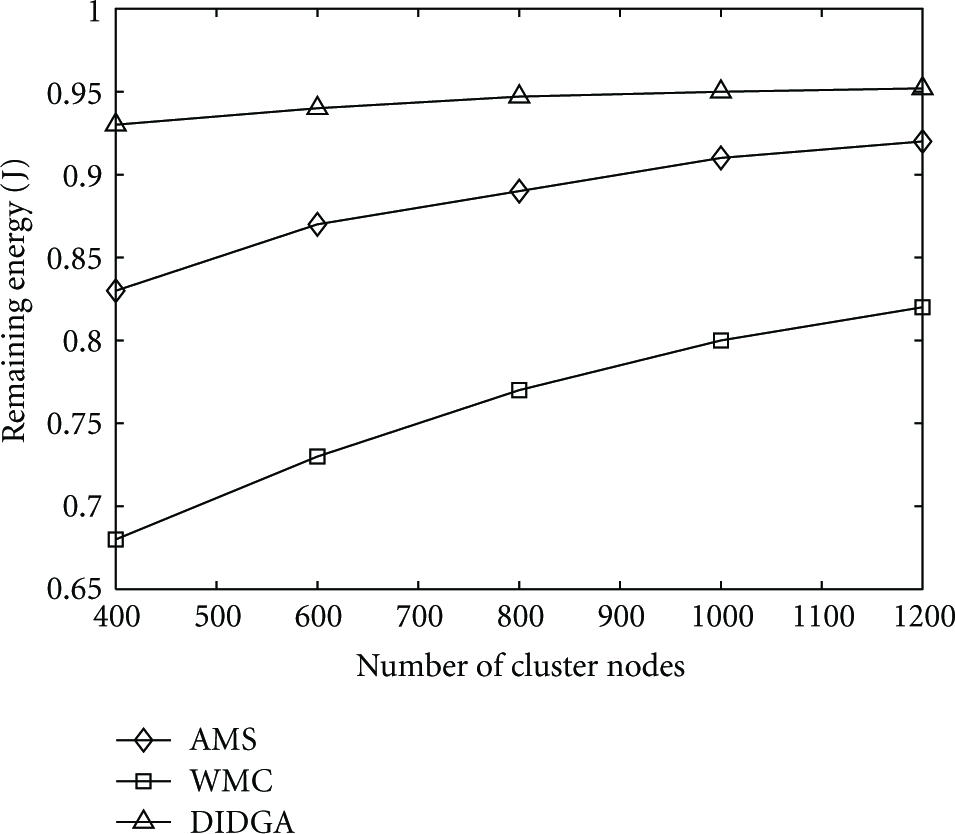
Remaining energy of cluster members.

Remaining energy of cluster heads.
Figure 8 shows the results of event detection ratio of different algorithm, where the expiration time
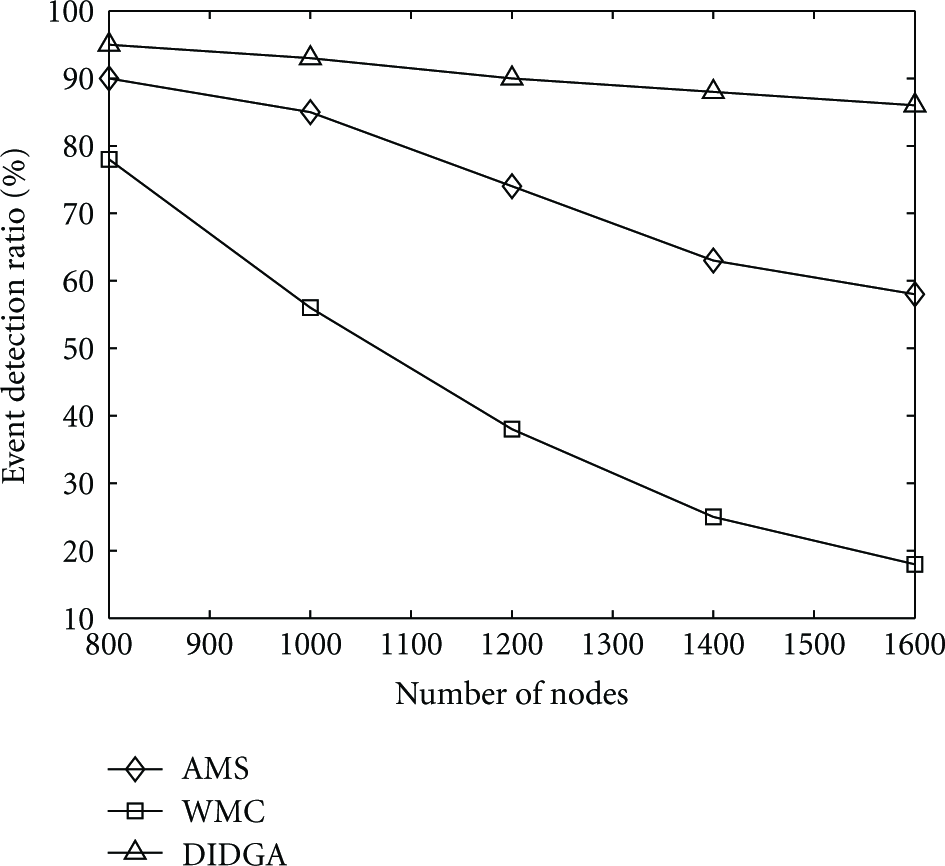
Event detection ratio of different algorithms.
The results of event detection ratio of different algorithms with the varying expiration time are shown in Figure 9, where the node number is 1200. As the expiration time increasing, the event detection ratio of different algorithms will increase obviously. Especially for WMC, the event detection ratio increases to 75.3%. The main reason is that WMC collects by nodes relay, which leads to longer delay time for remote nodes to transmit the real-time urgent events to the sink, and increasing expiration time will decrease the overdue data. So the expiration time has a great influence on WMC. The event detection ratio of AMC is higher than that of WMC clearly. Because AMS employs the mobile sink to collect sensed data, which will decrease time of data-gathering and collect more real-time event and sensed data. For the proposed DIDGA, the event detection ratio is higher than that of AMS. For example, when the expiration time is 300 s, the event detection ratio of DIDGA is 82.3%, which is higher than that of AMS about 20.9%. When the expiration time increases to 3600 s, the event detection ratio of DIDGA increases to 93.2%. Compared with AMC, DIDGA distinguishes the critical and noncritical data with different priorities and gathering schemes and reports the delay constraint event and time-critical data with higher priority. And the power saving and path formation schemes of DIDGA also help to prolong the lifetime of all sensor nodes to detect events successfully.

Event detection ratio of different expiration time.
5. Conclusion and Future Work
In order to reduce the high energy expenditure in multihop routing and extend lifetime in distributed WSNs, an efficient distributed intelligent data-gathering algorithm called DIDGA is also proposed for the mobile collector. A mobile collector is employed to gather the sensed data from nodes by dividing the whole network into certain MCDS to minimize it by reducing the number of hops in the network. A path formation optimized algorithm (PFOA) is also proposed which combines ant colony algorithm and evolutionary algorithm to satisfy the time-limited constraints. Detailed simulation results and comparisons with other algorithms show that DIDGA not only decreases average hop counts, average data-gathering time, but also improves event detection ratio, saves energy consumption of sensor nodes, and greatly extends the network lifetime.
Future work will address collaborative in-network processing to provide the required processing power not available in standalone sensor nodes. With this approach, the communication scheduling will choose reliable links and balance communication load among cluster nodes, which will increase the communication reliability and the network lifetime. Considering that the values of χ and δ have some influence on the path length, we'll try to find optimized weights χ and δ to decrease the path length.
Footnotes
Acknowledgments
This work was supported by the National Natural Science Foundation of China (No. 60902053), the Science and Technology Research Planning of Educational Commission of Hubei Province of China (No. B20110803), and the Natural Science Foundation of Hubei Province (No. 2008CDB339). The authors also gratefully acknowledge the helpful comments and suggestions of the reviewers.