
Abstract
The TDOA-based source localization problem in sensor networks is considered with sensor node location uncertainty. A total least squares (TLSs) algorithm is developed by a linear closed-form solution for this problem, and the uncertainty of the sensor location is formulated as a perturbation. The sensitivity of the TLS solution is also analyzed. Simulation results show its improved performance against the classic least squares approaches.
1. Introduction
Driven by many practical applications such as environment monitoring, traffic management in intelligent transportation, healthcare for the older and disabled, cyber-physical system (CPS) has emerged as a new advanced system to link the virtual cyber world with the real physical world [1, 2]. Sensor network is crucial to enable CPS by efficient monitoring and understanding the physical world. The main purpose of a sensor network is to monitor an area, including detecting, identifying, localizing, and tracking one or more objects of interest. These networks may be used by the military in surveillance, reconnaissance, and combat scenarios or around the perimeter of a manufacturing plant for intrusion detection. The problem of source localization involves the estimation of the position of a stationary transmitter from multiple noisy sensor measurements, which can be time-of-arrival (TOA), time-difference-of-arrival (TDOA), or angle-of-arrival (AOA) measurements or a combination of them [3–5].
Source localization methods using TDOA measurements locate the source at the intersection of a set of hyperboloids. Finding this intersection is a highly nonlinear problem [6, 7]. Over the years, many iterative numerical algorithms have been proposed for the problem, including the maximum likelihood estimation methods [8, 9] and the constrained optimization methods [10, 11]. In these approaches, linear approximation and iterative numerical techniques have to be used to deal with the nonlinearity of the hyperbolic equations. However, it is difficult to select a good initial guess to avoid a local minimum for them; therefore the convergence to the optimal solution cannot be guaranteed. The closed-form solution methods are widely used since no initial solution guesses are required and have no divergence problem compared with the iterative techniques [12–16]. For real-time application in WSNs, the iterative procedure for iterative algorithm is time consuming while the closed-form method is computational efficient.
The aforementioned approaches need the precise location of sensors. In practice, the receiver locations may not be known exactly. For example, in sensor network applications, the receivers can be with airplanes or unmanned aerial vehicles (UAVs) whose positions and velocities may not be precisely known. Hence, the inaccuracy in receiver locations needs to be taken into account in practical applications which is challenging and difficult as the estimation performance of source location can be very sensitive to the accurate knowledge of the receiver positions and a slight error in a receiver's location can lead to a big error in the source location estimate. In [17], a closed-form solution is proposed that takes the receiver error into account to reduce the estimation error. The proposed solution is computationally efficient and does not have the divergence problem as in the iterative techniques. In [18], the maximum likelihood formulation of source localization problem is given and an efficient convex relaxation for this nonconvex optimization problem is proposed. A formulation for robust source localization in the presence of sensor location errors is also proposed. Both the above methods assume that the measurement noise is Gaussian and characterize the uncertainty by stochastic approach with the perturbation being white and Gaussian.
However, such white and Gaussian assumptions are unrealistic in many practical applications [19–21]. Usually, if the Gaussian assumption are not met, the maximum-likelihood-based results under Gaussian assumption may lead to poor estimation performance, which means that the estimation performance is sensitive to the exact knowledge of the parameters of the system (see, e.g., [22]). These facts motivate us to further research on robust source localization method without any distribution assumption for measurements noise and sensor location error.
In this paper, we will develop a total least squares (TLSs) algorithm for location estimation of a stationary source. TLS is a least squares data modeling technique in which observational errors on both dependent and independent variables are taken into account. The uncertainty of the sensor location is formulated as a perturbation on the given sensor location. The sensitivity of the TLS solution will also be analyzed to show the superiority of our proposed algorithm. Compared with the existing methods which need the Gaussian assumption for both measurements noise and sensor location error, the TLS approach does not depend on any assumed distribution of the noise and errors. Simulation results support the above analysis and show good performance of the proposed method.
The rest of this paper is organized as follows. In Section 2, a linear closed-form solution is given for source localization problem using TDOA measurements. The total least squares method for source localization with sensor location uncertainty is given in Section 3, and the corresponding sensitivity analysis is derived in Section 4. Simulation results are presented in Section 5 to show the improved performance of the proposed method against the classic least squares approaches. Concluding remarks are made in Section 6.
2. A Linear Closed-Form Solution
Assume that sensor i is located at point







In [16], a noise ɛ is considered at the right side of (6):


The ordinary LS problem amounts to perturbing the observation vector b by a minimum amount
3. Total Least Squares Solution
The definition of the total least squares method is motivated by the asymmetry of the least squares method that b is corrected while A is not. Provided that both A and b are given data, it is reasonable to treat them symmetrically. One important application of TLS problem is parameter estimation in errors-in-variables models, that is, considering the measurements in A [23, 24]. We assume that the m measurement in


When A is of full rank, the closed-form expression of the basic TLS solution can be obtained as the following:

In the following, the algorithm computation complexity is analyzed by considering the number of floating-point operations (FLOPS). The calculation of FLOPS is briefly described as follows: additions and multiplications count as one FLOP each. Adding matrices of sizes
4. Sensitivity Properties of the Solution
In this section, we will first examine how perturbations in A and b affect the solution X. In this analysis the condition number of the matrix A plays a significant role. The following definition generalizes the condition number of a square nonsingular matrix [26].
Definition 1.
Let

Matrices with small condition numbers are said to be well conditioned while the ones with large condition numbers are said to be ill-conditioned. Analyzing the effect of perturbation on the solution of linear system
Lemma 1.
If
Theorem 1.
Denote
Proof.
Noting that A and


From the theorem we can see that, only when the perturbations are sufficiently small, the LS solution is a good estimator of the true solution of
Additionally, we will show when the TLS solution has better performance than the LS solution for the perturbed model





The accuracy of TLS and LS solutions related to the perturbation effects on singular values and associated singular subspaces [23]. Several papers have analyzed the bounds on the perturbation effects related to singular subspaces [28–30]. The most interesting results for sensitivity analysis of TLS solution are given in [30].
Definition 2.
Denote two subspaces as L and M. For any unitary invariant norm, the distance between two subspaces is defined as the sine of the largest canonical angle

Theorem 2.
Let the SVD of

Theorem 2 is a special case of the generalized
Recall the perturbed system


Corollary 1.
One has
The interlacing theorem (see [31]) implies that

5. Simulations
5.1. Simulation Setup
In this section, simulations are carried out to show the effectiveness of the proposed method. Two scenarios are investigated for their effects on localization performance, including Gaussian distribution and truncated Gaussian distribution for measurement noise and sensor node location error. In our simulation, unless otherwise specified, sensors are randomly deployed in a

Simulation scenario.
In order to show the improved performance of our proposed method with the existing closed-form method, we investigate LS method in [16] and WLS method in [17]. Root mean square error (RMSE) is used as the criterion for localization performance. The following simulations are performed with 500 Monte Carlo trials. In all figures, the red solid line with square, black dash line with circle, and blue dotted dash line with triangle represent the results of TLS, WLS, and LS solutions, respectively.
5.2. Gaussian Case
In this case, we consider the Gaussian distribution for both measurement noise and sensor node location error. The effect on estimation performance for different measurement noise variance value is investigated. Measurement noise variance

Localization errors versus noise variance (Gaussian case).
In the second simulation, the effect on estimation performance with different variance of perturbation is investigated. The variance of perturbation is set to be varied from 10 to 100 and sensors are deployed uniformly. The measurement noise variance is set to be 50. The localization performance variation with variance of perturbation is depicted in Figure 3. The TLS algorithm outperforms the LS and WLS significantly with high-level variance of perturbation.

Localization errors versus perturbation variance (Gaussian case).
The estimation performance of three algorithms is also investigated with different numbers of deployed nodes. Figure 4 shows the RMSEs versus the number of nodes. Fifty nodes are uniformly generated in the field. Localization starts by using five randomly selected nodes for each algorithm, followed by adding more nodes of five in a group until all fifty nodes are used. The number of FLOPS is considered to evaluate the algorithm computational complexity with variation of the number of nodes. Results are given in Figure 5 with 2-dimensional source location parameter and 5–50 nodes. It can be seen that LS required the fewest FLOPS while TLS required the most FLOPS with SVD of matrix. Although the estimation performance is improved with more nodes for all algorithms, the computation overhead is also increased. t is to show that LS method is the most computationally efficient, whereas WLS method is two-stage least square method and TLS method has singular value decomposition for matrix.

Localization errors versus number of nodes (Gaussian case).
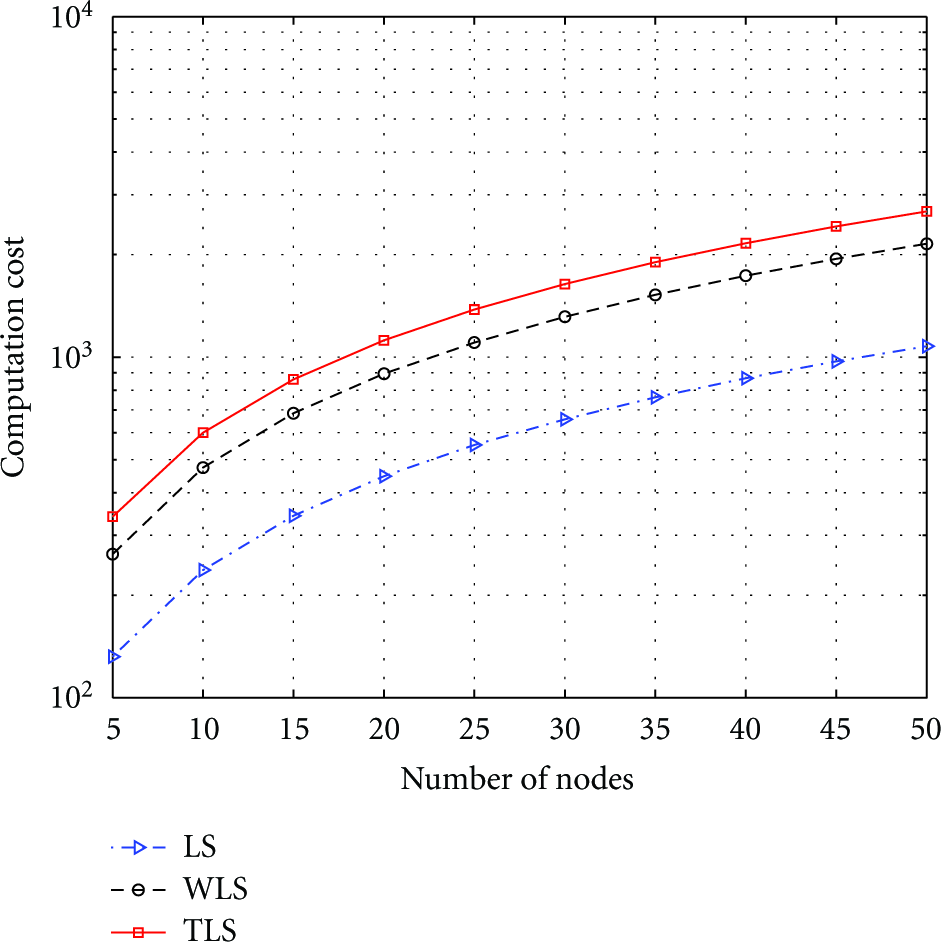
Computation cost versus number of nodes.
5.3. Truncated Gaussian Case
Since the white and Gaussian assumptions are unrealistic in many applications, we consider the truncated Gaussian distribution for both measurement noise and sensor node location error in this case. Let X be a random variable with zero mean Gaussian distribution truncated in the interval

Compared with the Gaussian case, similar results can be obtained and are shown in Figures 6, 7, and 8. The estimation performance for the WLS algorithm distinctly degrades significantly. This is because the weight matrix for this WLS method is calculated according to the Gaussian assumption for the measurements noise and sensor node location error. The proposed TLS algorithm still maintains good estimation performance.

Localization errors versus noise variance (truncated Gaussian case).

Localization errors versus perturbation variance (truncated Gaussian case).

Localization errors versus number of nodes (truncated Gaussian case).
6. Conclusions
In this paper, the TDOA model for source localization in sensor networks has been considered. The total least squares (TLSs) algorithm has been developed for location estimation of a stationary source with sensor location uncertainty in which the uncertainty of the sensor location has been formulated as a perturbation. The sensitivity of the TLS solution has also been analyzed to show the advantages of our proposed algorithm. Compared with the existing methods which need the Gaussian assumption for both measurements noise and sensor location error, the TLS approach does not depend on any assumed distribution of the noise and errors. Simulation results show the superior performance of the proposed method.