
Abstract
We analyze a distributed variation on the Pólya urn process in which a network of tiny artifacts manages the individual urns. Neighboring urns interact by repeatedly adding the same colored ball based on previous random choices. We discover that the process rapidly converges to a definitive random ratio between the colors in every urn. Moreover, the rate of convergence of the process at a given node depends on the global topology of the network. In particular, the same ratio appears for the case of complete communication graphs. Surprisingly, this effortless random process supports useful applications, such as clustering and computation of pseudo-geometric coordinate. We present numerical studies that validate our theoretical predictions.
1. Introduction
Designers of distributed algorithms often assume that each node is computationally powerful, capable of storing nontrivial amounts of data, and carrying out complex calculations. However, recent technological developments in wireless communications and microprocessors allow us to establish networks consisting of massive amounts of cheap and tiny artifacts that are tightly resource constrained. These networks of tiny artifacts are far more challenging than the traditional networks; on one hand, their relative scale is enormous, while on the other hand, each tiny artifact can only run a millicode that is aided by a miniature memory. Such limitations are not crippling if the system designer has a precise understanding of the tiny artifacts' computational power and local interaction rules from which global formation emerges.
1.1. Related Work
Urn processes (and more generally processes with reinforcements) are a tool for modeling stochastic processes that show emerging structures. Their aim is to analyze the global structure of a given population given the micromechanisms the particular entities are applying. The global structure reflects the ability of the entities to self-organize. Such models can explain the preferential-attachment model in small-world networks, the process of market sharing, interaction of biological entities, and so forth, based on given micromechanisms. We refer to [1, and references therein] for reinforcement processes, for models based on urn models see [2], and for the emergence of structure we refer to [3].
Tishby and Slonim [4] use random processes for network clustering. The authors use a Markov process and the clusters are built by considering the decay of mutual information. The information changes with time, and during an appropriate period, the mutual information is relevant for clustering. After this period, the mixing property of the Markov process destroys the emerged structure. The random processes we suggest converge so slowly that the mixing property is useful for tolerating various faults. Nevertheless, the process obtains the significant values rapidly.
Angluin et al. [5] define urn automata that include a state controller and an urn containing balls with a finite set of colors. Tiny artifacts can implement the urn automata with provable guarantees regarding their computational power and, by that, allowing the exact analyses of the interaction process among artifacts. This work aims at understanding the possibilities of the urn automata to emerging global formations using miniature algorithms and diminutive resources.
1.2. Our Contribution
In this paper our aim is to extend the classical urn process to a network of interacting urn processes and to analyze the emerging global formation, which is carried out by a low-level interaction process. The network of tiny artifacts repeats the following operations. Each urn has a multiset of black and white balls, initially one of each color. A given tiny artifact draws a ball from the urn with uniform distribution and returns to the urn the ball along with a new ball of the same color. (This is a classical Pólya urn [6].) The tiny artifact interacts with its neighbors on the network. Namely, after returning the two balls, the tiny artifact announces the balls' color to its neighbors, and the neighbors add a new ball of that color to their urns. The selection of the artifact drawing the ball from the urn is random and uniform (any artifact might be selected with the same probability).
Indeed, if we assume that, before drawing from the urn, the tiny artifacts wait for a random time with λ-exponential distribution, then globally, the tiny artifacts are going to be selected uniformly without any global synchronization. (The implementation of this assumption in distributed systems is considered in Section 4.) Notice that the algorithm steps are composed of the following operations:
This work presents the following.
First is an analysis of the interacting urns process, allowing us to demonstrate that the ratio between the numbers of black and white balls in every urn is converging and that these ratios, which are obtained locally, provide global information about the communication graph. Second are the applications for large-scale networks of tiny artifacts include clustering and the computation of pseudogeometric coordinates. We present numerical studies that validate our theoretical predictions on the emerging global formations. Self-stabilizing systems [7, 8] can recover after the occurrence of transient faults. These systems are designed to automatically regain their consistency from any starting state. The property of self-stabilizing facilitates the requirements of self-organization in ad hoc networks [9–11]. The interacting urn process analysis assumes undisturbed steps and that all urns are selected with the same probability. We explain how to implement the interacting urn process in a self-stabilizing manner (see [8]). We use existing self-stabilizing building block that facilitates the announcement of ball drawing on shared communication media.
1.3. Document Structure
We start by analyzing the process (Section 2), before presenting the applications (Section 3), and the implementation (Section 4). Lastly, we draw our conclusions (Section 5).
2. The Interacting Urns Process
There is no unified way of analyzing the behavior over time of the type of systems we consider in this paper. These systems usually cannot be understood with Markovian formalism. Indeed, the system behavior over time is Markovian but describing the process in this way leads to an intractable set of equations. Relative to these kinds of processes, which are characterized by path-dependence or (negative) reinforcement, we can find various ad hoc techniques. Many references are available from the survey [1]. We show that there is a connection between a time-based analysis of the interacting urns process and multitype branching process [12]. We use this connection and existing literature to that the evolution equations of the interacting urns processed.
We start by establishing firmly how the tiny artefacts randomly draw balls from their urn with a uniform probability. For the sake of presentation simplicity, we assume in Lemma 1 that within a single operation that takes no time, we can draw a ball and advertise it, that is, announce the ball's color to all neighboring urns. (In Section 4, we consider a possible implementation that does not require this assumption.)
Lemma 1.
We consider N artefacts which repeatedly wait for an λ-exponentially distributed random time independently of each other before proceeding to a random draw. Then, the probability that artefacts proceed to a random draw is uniform.
Proof.
A λ-exponential waiting time can be facilitated by the following p-persistence-like technique. Every artefact decides with probability
As a conclusion from Lemma 1, we say that the artefacts wait independently for a random exponentially distributed random time (with the same parameter λ) and then draw and announce a random ball from their urns. Let N be the number of artefacts composing the network. The state of the interacting urns process is described by the vector:

Every time the artefact owner or one of its neighboring artefacts proceeds to a random draw, the population size in a given urn i increases by one unit. Then, asymptotically, the population size increases linearly with time and proportionally to
In order to look at the evolution of our process described by the state vector
A convenient way of pursuing the computations is to use the probability generating function given by

In order to compute the probability generating function, we first compute


From (4), we obtain by computing the expectation on both side and passing to the limit

We first observe that

By differentiating both sides of (5) with respect to

We then obtain a differential equation for


The FokkerPlanck equation (7) is one of a multitype branching process with constant rate (

From (7) we know that given an initial urn content vector


Proposition 1.
Let ξ be a right eigenvector of the matrix A and
Proof.
The representation of the time evolution of the mean vector



We also state the following corollary which will be useful in the next section.
Corollary 1.
We denote by

Proof.
To compute the decomposition, we use the fact that by assumption the eigenvectors are orthogonal. To get the coefficient
The convergence rate of the process is determined by the second largest eigenvalue.
Proposition 2.
The eigenvalues
Proof.
Let
This proposition shows that the dominant eigenvalue of the matrix A is 1 and one can check that the corresponding left eigenvector is given by
Proposition 3.
Let x be the left eigenvector of A corresponding to the eigenvalue 1, then
Proof.
The proof uses the same decomposition of the matrix A as in the previous proposition and proceeds by direct computations using the fact that the matrices
Generalized eigenvectors are useful for spectral graph drawing. Actually, as discussed in [16], generalized eigenvectors corresponding to the generalized eigenvalues smaller than the dominant one provide coordinates for drawing the graph in the plane. Numerical evidence supports the fact that such generalized eigenvectors provide better coordinates than the eigenvectors of the Laplacian matrix. This proposition will support our application of the interacting urn process to clustering.
We now consider what does happen if we distinguish black and white balls in a same urn. Actually, the analysis previously presented carries on, the rate of split/die of the particles living in a given urn of different colors being asymptotically independent since
Theorem 1.
The scaled interacting urn process populations converge to a random vector which is proportional to the left eigenvector of the matrix A corresponding to the maximal eigenvalue 1; see (12). The ratio of the black balls among the total population of a given urn, denoted


Proof.
The equivalence between the two expressions above follows from simple computation; we point out that the difference between the two sums is that in the first one we take into account the term



Broadly speaking, it is hard to get general results on the convergence rate of the interacting urn process because it is related to random processes (e.g., processes with reinforcement [1]). The process convergence rate depends on the value of the second largest eigenvalue of A. The difficulty of asserting general results is mainly because such results depend on the topology of the interactions, that is, the matrix A. However, the case where the topology of the graph of interactions is a complete graph is easy to understand, because the completeness implies identical urn content and the process is similar to the classical Pólya urn. This can motivate us to investigate the applications of the interacting urn process in clustered networks, since nodes that share many links are apt to develop similar urn content. Another folk result concerning processes similar to the interacting urn process is that the time for convergence to the definite value is usually very large and not numerically observable. However, some significant values may emerge quickly from the dynamic process. Moreover, notice that due to the probabilistic nature of the interacting urn process, fault tolerance is implied; there is an inherent recovery after the loss of a ball, say, due to communication interferences.
3. Applications
We now turn to describe two of the many possible applications of the interacting urn process in networks of tiny artifacts.
3.1. Cluster Formation
Spectral graph drawing considers the entries of the generalized eigenvector of
3.1.1. The Analysis
We have shown that the population vector
The preceding analysis suggests running the interacting urn process and clustering neighbor nodes whose difference

By (24), we have that
We note that

We conclude that the difference
3.1.2. Numerical Results
A numerical study that validates our theoretical prediction is presented in Figure 1. In the experiment, the schedule of nodes interaction is generated uniformly at random. The time to stop the process was obtained while the clustered network stopped evolving visually, after about 20 draws per node; however, the global formation starts to emerge after 15 draws per node. In Figure 1, we observe that the algorithm behaves as expected, and a global cluster formation emerges.

Clusters obtained with the interacting urn process. The left graph depicts the communication graph (
3.2. Pseudogeometric Coordinates
In very large-scale networks, it is not possible to register the location of all nodes manually, or to equip all tiny artifacts with GPS units (such as [17]). Nevertheless, position-awareness is of great importance for many applications. For example, it is sometimes required or desirable to route without position information and to use virtual coordinates for georouting (see [18–20]). The algorithms for virtual coordinates assume that the underlying communication graph has a realization of a unit disk graph. The algorithms extract connectivity information of the communication graph and find a realization of virtual coordinates in the plane. For example, the realization can require that each edge has length at most 1 and that the distance between nonneighbored nodes is more than 1.
Rao et al. [18] describe an algorithm for computing virtual coordinates to enable geographic forwarding in a wireless ad hoc network. The mechanism in [18] is related to graph embedding. It is known that finding such a realization from connectivity information only (by using embedding of a unit disk graph) is NP hard (see [21]) and also hard to approximate (see [22]). Some applications do not require the realization of a unit disk graph. For example, georouting can be facilitated by pseudogeometric coordinates (see [23]). An algorithm for pseudogeometric coordinates selects several nodes,

After repeatedly letting each node
3.2.1. The Process
We assume that merely a few anchor nodes have a registered position by some means, for example, using a GPS unit. We aim at letting all others nodes derive a coordinate system through connectivity information. Our approach is similar to that of Wattenhofer et al. [23], however, we are interested in using the interacting process as a heuristic that are applicable for random geometric graphs. (Random geometric graphs are constructed by dropping n points randomly uniformly into the unit square,
We wish to emulate a similar process to the one described above, and let the interacting urn process estimate the mean of the barycentric neighboring values. Therefore, nodes maintain two urns, one for the x-axis and one for the y-axis, each urn composed of black and white balls. The position
3.2.2. Numerical Results
The obtained coordinates are presented in Figure 2. Similar to the clustering application, the time to stop the process was obtained while the pseudogeometric coordinate stopped evolving visually, after about 20 draws per node; however, the global formation starts to emerge after 15 drawings per node.

Pseudogeometric coordinates obtained with two interacting urn processes. On the left graph, we see the communication graph (
A statistical study is presented in Figure 3. Both charts consider a random geometric graph (Random geometric graphs are constructed by dropping n points randomly uniformly into the unit square,
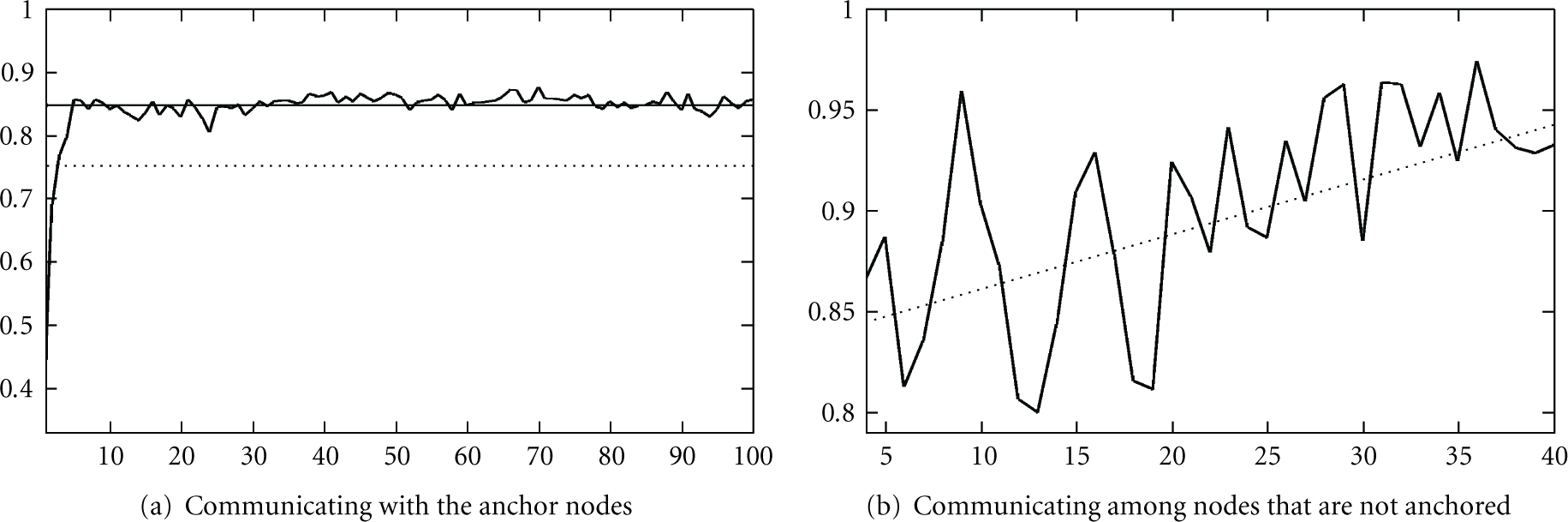
In more detail, for every two nodes, u and v, let us define
Georouting facilitates the communication between any pair of nodes (that are not necessarily one of the anchor nodes). Therefore, we consider the statistical correlation between
The correlation values that are presented in Figure 3 suggest that (over time), the pseudogeometric coordinates can facilitate georouting better than real coordinates, because of their stronger statistical coalition to the hop distance.
4. The Implementation
We present a self-stabilizing implementation of the urn process. The pseudocode of the implementation is given in Algorithm 1. Before we explain the design, we list the key assumptions used in the analysis of interacting urn processes. For instance, it assumes that time is continuous. However, in practice, clock mechanisms are discrete. Fortunately, when considering a stochastic process evolving in continuous time, it is always possible to conduct a discrete process by considering merely the produced successive events and ignore any reference to continuous time. The transformation from continuous to discrete stochastic model is known as discrete skeleton (see [29]).
2 T: the parameter of the floating output 4 colors: 6 timeouts: 8 urn: multiset of colors, initially 10 output: the output value of the algorithm 12 14 16 18 20 urn ← urn 22 24 26 urn ← urn 28 30 output ← urn urn ← 32
4.1. Serializable of Algorithm Steps
Another assumption that we make in our analysis is about the instantiation of the algorithm steps. Namely, the analysis assumes that the algorithm steps are serializable, that is, it takes no time to draw a ball, announce it, and let the drawing tiny artifact and the neighboring tiny artifacts update their urns.
In real distributed systems, these assumptions do not always hold and concurrent algorithm steps can be nonserializable. Therefore, we require that at any time and any neighborhood, there is at most one tiny artifact that takes an algorithm step. In other words, no two nodes that have a path of less than three hops may concurrently take the algorithm steps.
In order to provide serializability of the algorithm steps, we borrow existing self-stabilizing infrastructure. Herman and Tixeuil [30] present a self-stabilizing algorithm for accessing a shared media, such as the communication environment of wireless tiny artifacts. The algorithm assures that starting for an arbitrary configuration of the system, eventually every node has a unique time slot for broadcasting. Namely, no node broadcasts concurrently with a neighboring node. The property of time slot uniqueness facilitates serializable steps of the algorithm that is presented in Algorithm 1. In other words, when the broadcasting time slot of a particular tiny artifact arrives, this tiny artifact can draw a ball (see line 25), announce it using a broadcast (that eventually does not collide; see line 26), and let the neighboring tiny artifacts update their urns; see line 21 (as well as updating its own urn; see line 27). Hence, eventually the algorithm steps are serializable.
4.2. Self-Stabilization
Self-stabilizing systems [7, 8] can recover after the occurrence of transient faults. These systems are designed to automatically regain their consistency from any starting state. The arbitrary state may be the result of violating the assumptions about the system settings and assist with dealing with the self-organization requirements of ad hoc networks. The correctness of a self-stabilizing system is demonstrated by considering every sequence of actions that follows the last transient fault and is, therefore, proved assuming an arbitrary starting state of the automaton.
The property of serializability is guaranteed to be archived eventually. We note that since this property does not always hold, it implies, for example, that while the network of tiny artifacts is deployed, the property of serializability can be violated.
The technique of floating output (see [8]) is a way to convert a nonstabilizing algorithm that computes a fixed output into a self-stabilizing algorithm. We use the technique of floating output in order to overcome the scenarios in which the property of serializability is violated during the deployment of the network.
The algorithm executes the interacting urn process for a sufficiently long period, T, that allows the interacting urn processes to produce the correct output (assuming that the property of serializable steps is never violated). We name by parameter of the floating output the constant T.
We assume that the system has access to a self-stabilizing clock synchronization mechanism (such as [31, 32]), that facilitates the agreement on a particular time slot once in every T time slot. The algorithm makes sure that in that time slot
4.2.1. Correctness
Demonstrating that the algorithm presented in Algorithm 1 is self-stabilizing is quite simple and is followed by the conventional arguments of the technique of floating output (see [8]).
We consider the period that is after the network was deployed and the media access algorithm has stabilized to work correctly. It is required to demonstrate that within a period of T, the variable
5. Conclusions
We are interested in simplifying the design of tiny artifacts and bridging the gap between these future networks and existing ones. Existing implementations, say, for sensor networks, often use protocols that assume traditional system settings that require resources that tiny artifacts do not have. Alternatively, when the designers do not assume traditional system settings, they turn to improving performance and reducing resource consumption by using probabilistic algorithms. However, designers that do not consider implementation explicitly do not specify the exact computational power required for each node. In some cases, the implementation requires storing nontrivial quantities of data.
This work presents a self-stabilizing building block that can facilitate infrastructure for tiny artifacts, such as reasonable clustering and efficient georouting. Our analytical and numerical results show that global formations appear rapidly (with the use of small number of transmissions and few bits at a time).
Footnotes
Acknowledgments
This work would not have been possible without the contribution of Paul G. Spirakis in many helpful discussions, ideas and analysis. Many thanks are due to Edna Oxman for improving the presentation. The authors are thankful for the code provided by the students of the course DATX01-15 (Chalmers University of Technology), 2008. This work has been partially supported by the Swiss SER Contract no. C05.0030, and by the ICT Programme of the European Union under contract number FP7-215270 (FRONTS). An extended abstract of this paper appeared in [![]() ].
].