
Abstract
The topology control techniques of underwater wireless sensor networks and terrestrial wireless sensor networks are significantly different because of the particularity of underwater environments and acoustic communication. In this paper, an underwater wireless sensor network model was constructed, and six universal topology control objectives were concluded. The QoS topology control problem was mapped into an ordinal potential game model, and a distributed strategy adjustment algorithm for nodes was designed accordingly. The strategy vector resulting from the algorithm converges to the Nash equilibrium; minor complexity and preferable approximate ratios can be represented by the algorithm as well. The performance of the algorithm was analyzed through simulation experiments which indicate a well-constructed topology. Every objective was upgraded when model parameters were set suitable.
1. Introduction
Recently, there has been growing interest in the application of sensor networks in underwater environments to enable and enhance applications such as ocean resource exploration, pollution monitoring, and tactical surveillance [1–3]. Before the emergence of wireless sensor networks (WSNs) [4], the perception and collection of underwater data are generally accomplished through wired networks which are very costly. Underwater wireless sensor networks (UWSNs) [5–7] are the enabling technology for these underwater applications. UWSNs consist of sensors that perform collaborative monitoring tasks over a three-dimensional volume. Acoustic communications [8, 9] are the typical physical layer technology in underwater networks. There are three types of nodes in UWSNs: bottom nodes, anchored nodes, and surface sinks. The given phenomenon is observed by interconnected bottom and anchored nodes in charge of relaying data to surface sinks. The architecture of a UWSN is depicted in Figure 1.
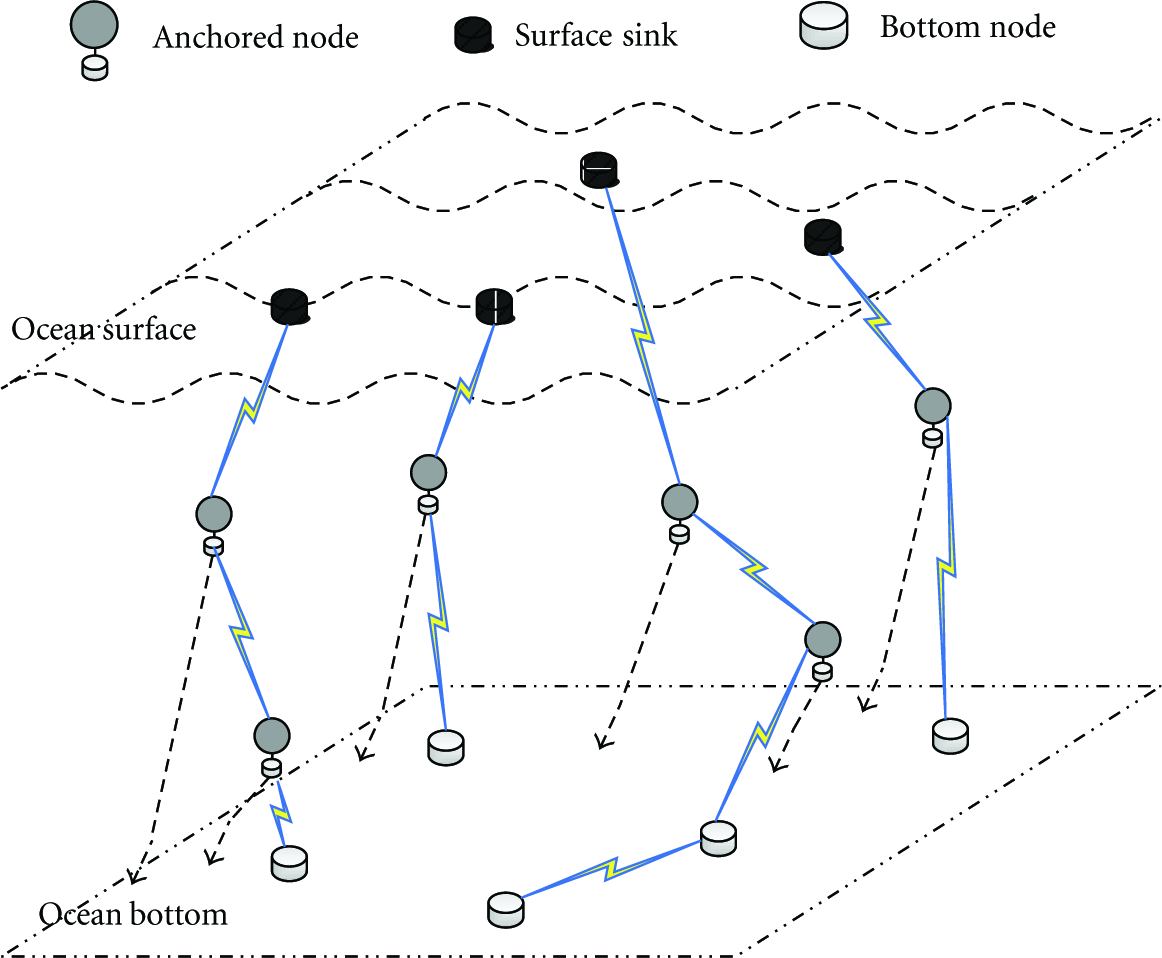
UWSN architecture.
Figure 1 illustrates a three-dimensional UWSN; each bottom or anchored node can monitor and detect environmental events locally, and then transfer these measurements to a surface sink by multihops. Bottom nodes are spread on the seabed. Anchored nodes are equipped with floating buoys that can be inflated by pump. The depth of the anchored node can be regulated by adjusting the length of the wire.
QoS is an important issue in WSNs because quality of service has immediate impact on the availability of networks, and topology control is one of the main techniques to improve the quality of WSN service. Due to the specificity and complexity of the water medium, UWSN and terrestrial wireless sensor networks are significantly different. These differences include the following: (a) the propagation delay of the acoustic wave is much larger than that of the electromagnetic wave, and the propagation delay in UWSN cannot be neglected. (b) The limited bandwidth of underwater acoustic links is prone to cause high error rates and frequent dynamics of topology [10]. (c) Underwater acoustic communication requires more energy for signal modulation, and the energy consumption for sending messages is significantly larger than that for receiving. These differences make it difficult to guarantee the quality of the service (e.g., propagation delay, bandwidth, and transmission success rate) in UWSNs. In this regard, topology control is an efficient way to enhance the quality of services. In addition to the common topology control objectives of WSNs (full coverage, network connectivity, decrease in energy consumption, enhancement of network capacity, reduction of communication interference, and increase of spatial reuse), the topology control objectives in UWSN should also include the shortening of propagation delay, improvement of energy consumption efficiency, extension of network lifetime, augmentation of transmission bandwidth, and increase in the transmission success rate. Therefore, in this paper QoS-based topology control for UWSN is defined as the art of coordinating nodes' decisions regarding their communication and sensing ranges, in order to generate a network topology with the desired properties (e.g., connectivity, coverage), while optimizing some (or all) of other service metrics (e.g., energy consumption, propagation delay, transmission bandwidth, and transmission success rate) in underwater environments.
The remainder of this paper is organized as follows. In Section 2, we discuss related works; in Section 3, we describe the UWSN model and define some concepts; in Section 4, we map QoS topology control problem into an ordinal potential game model; Section 5 proposes a strategy adjustment algorithm SAA; in Section 6, SAA is analyzed from the aspects of convergence, complexity, and approximate ratio; in Section 7, we discuss the performance evaluation of SAA; finally, Section 8 provides some conclusions.
2. Related Work
The problem of QoS topology control for WSN has been extensively studied. However, most studies have been based on specific applications or partial objectives. Furthermore, the characteristics of acoustic communication and underwater environments have never been taken into account. Li et al. [11] proposed an MST-based topology control algorithm (LMST) that can effectively reduce transmission power while maintaining global connectivity. However, the topology obtained by LMST is fragile, and network lifetime is prone to termination. In a study by Li et al. [12], the QoS topology control problem in heterogeneous ad hoc networks was formulated as an integer linear programming problem or a mixed integer linear programming problem. This produced a network topology that meets QoS requirements and minimizes the maximum energy utilization of nodes. Liu et al. [13] reported that each node in the network has different functionalities in data transmission, and they correspondingly proposed a topology control algorithm (EasiTPQ) to improve packet loss rate and propagation delay. Cai and Yang [14] presented a multi-QoS optimization distributed topology control algorithm (MQOTC) considering residual energy, end-to-end delay, and link loss ratio; every sensor node builds the local maximum QoS topology independently. MQOTC is distributed and is scalable, but it does not consider the full coverage objective, and it cannot be adapted when the requirements of specific applications change. To ensure high QoS (maximizing network lifetime and ensuring message delivery), a topology control algorithm (EBC) which exploits the edge of the centrality concept is proposed [15]. In the investigation conducted by Ma et al. [16], both centralized and distributed QoS topology control approaches employing opportunistic transmission are put forward; simulations demonstrate that the approach significantly improves energy efficiency with low communication overhead. Forghani et al. [17] improved network lifetime and decreased average energy consumption by reducing the transmission power of nodes and periodically choosing the active path. However, the approach ignores the extra overhead brought by the periodical regulation of active paths. Reference [18] proposed a framework, based on the emergent potential games to deal with a variety of network resource allocation problems. But the framework was designed for terrestrial wireless sensor networks, and some basic topology requirements (e.g., coverage) were not taken into account. An energy-efficient topology control algorithm FiYG was proposed in [19]. FiYG was designed for three dimensional UWSNs, but it was unable to achieve typical underwater QoS objectives.
In summary, the existing algorithms or approaches of QoS topology control are difficult to apply in UWSN because of the following. (a) Currently, the QoS topology control objectives of UWSN have not been analyzed intensively. Therefore, some important objectives in underwater environments have been neglected. (b) Due to the multiformity of UWSN applications, different QoS objectives will be required in different applications. The QoS topology control model and algorithm should be capable of objective-driven adaptation. (c) Most current studies assume that the deployment space is a two-dimensional plane. However, underwater topography is complicated, and so the deployment space must be three dimensional.
Inspired by such motivations, the QoS topology control for UWSN is investigated in this paper by exploiting the ordinal potential game model. Given an amount of wireless sensor nodes in a 3D space where nodes have a set of strategies (i.e., different communication radiuses and sensing radiuses) and given the capacities of energy consumption, propagation delay, bandwidth, and transmission success rates on links, the aim is to find a UWSN topology that can meet both full coverage and global connectivity while optimizing other objectives as much as possible.
3. UWSN Model
Our work is based on the scenario that a set of static sensors are deployed in underwater space
3.1. Model Description
(1) Nodes
For all
(2) Links
For all
(3) Paths
For all
3.2. Definitions and Assumptions
Suppose that X is a set of Boolean values, and R is a set of positive real numbers. UWSN coverage function is expressed as
Definition 1.
Node coverage space: for all
Definition 2.
Bidirectional links: for all
Definition 3.
Full coverage: for all
Definition 4.
Global connectivity: for all
Definition 5.
Alive status of UWSN: full coverage and global connectivity can be achieved by awake nodes set
Assumption.
Sensor nodes are uniformly distributed in
Assumption.
Assumption.
Assumption.
For all
Assumption.
If for all
3.3. Objectives
The QoS topology control objectives of UWSN can be presented as
Objectives (i) and (ii) should be strictly satisfied, and objectives (iii)–(vi) are optimized as much as possible. The QoS topology control problem with multiobjective optimization is a NP-hard problem which will be solved approximately by the ordinal potential game in the next section.
4. Ordinal Potential Model
4.1. Game Description
Game theory attempts to mathematically capture behavior in strategic games, in which an individual's success in making choices depends on the choices of others [20]. Similarly, every node in UWSN expects to optimize service quality, and decisions of radiuses (communication and sensing radiuses) of nodes are dependent on each other, hence topology control can be considered as a game process. In order to map the topology control problem into a game model, the tuple (communication radius, sensing radius) is viewed as the strategy of node, and payoff function of every node should be defined. To facilitate the description of the model, the explanations of symbols are first given as shown in Table 1.
Description of symbols in the game model.

The mixed-strategy game is impractical in the context of design problems [21, 22]; therefore, the pure strategy game [23, 24] is considered. The pure strategy game is denoted as 
In Expression (1), for all 
Payoff function vector 
In Expression (3),
4.2. Payoff Function
A sufficient condition is given for full network coverage size to guarantee global connectivity.
Lemma 6.
When
Proof.
The proof is similar with Theorem 7 in a study by Wang et al. [25]; for any two nodes
(a) Coverage Function
Any node 
Formula (5) shows that the coverage function is the product of all nodes' local coverage functions.
Formula (6) means all points in every node's possible maximum coverage area should be covered by at least another node.
Theorem 7.
Full coverage can be achieved when
Proof.
(b) Energy Consumption Function
For any node 
(c) Propagation Delay Function
Suppose that the number of neighboring nodes is κ in 


(d) Bandwidth Function

(e) Transmission Success Rate Function

Theorem 8.
Proof.
The ordinal potential function is defined as 
If
If
If
If
As a result of the analysis, the sign of
Definition 9.
Nash Equilibrium (NE):
Potential games are known to possess at least one NE in pure strategies as proven in previous reports [29].
5. Algorithm
In this section, a distributed strategy adjustment algorithm (SAA) is proposed for nodes to achieve objectives (i) and (ii) while optimizing objectives (iii)–(vi) approximately. The following are the description and pseudocode of the SAA algorithm.
Strategy Adjustment Algorithm (SAA)
Any node If one node receives announce_msg, then it replies with receive_msg (Table 2). At the ξth round, the node which will adjust the strategy is selected randomly from the probability formula
For any node The strategy of Upon completion of the strategy adjustment, the last round broadcasts announce_msg.Step 1.
Step 2.
Step 3.



Step 4.
Step 5.
Announce_msg/receive_msg structure.

Inquire_msg/feedback_msg structure.

The pseudocode of SAA is given in Pseudocode 1.
6. Algorithm Analysis
6.1. Convergence
SAA is theoretically proven to be convergent.
Theorem 10.
SAA converges to NE.
Proof.
For all 
After strategy update, the payoff of
6.2. Complexity
For any node
Theorem 11.
For all
Proof.
Suppose that there exist
The implementation and operating cost of algorithm realization can be measured with algorithm complexity. The complexity of a distributed algorithm is measured in message complexity and time complexity [30]. The quantity of messages in SAA depends mostly on the judgment of UWSN coverage (Step 3). According to Theorem 11 and Assumption 1, the strategy adjustment of one node can possibly influence the local coverage function of
SAA should be executed N rounds; therefore, the time complexity of SAA is considered as
SAA has polynomial complexity, which indicates relatively low implementation cost of SAA realization.
6.3. Approximate Ratio
Supposing that the total payoff function 
7. Performance Evaluation
SAA is evaluated by observing the performance variation when adopting different model parameters and by comparing SAA with other algorithms. SAA is realized in OMNeT++ [31]. MAC Layer and routing are outside the scope of this paper. The IEEE 802.15.4 routing algorithm [32] is adopted for MAC and FA [33]. The simulation environment is set as
Simulation Parameters.

7.1. Connectivity and Coverage
The connectivity of UWSN is defined as the proportion of the maximum number of connected nodes and N; the coverage is the proportion of current covered space and
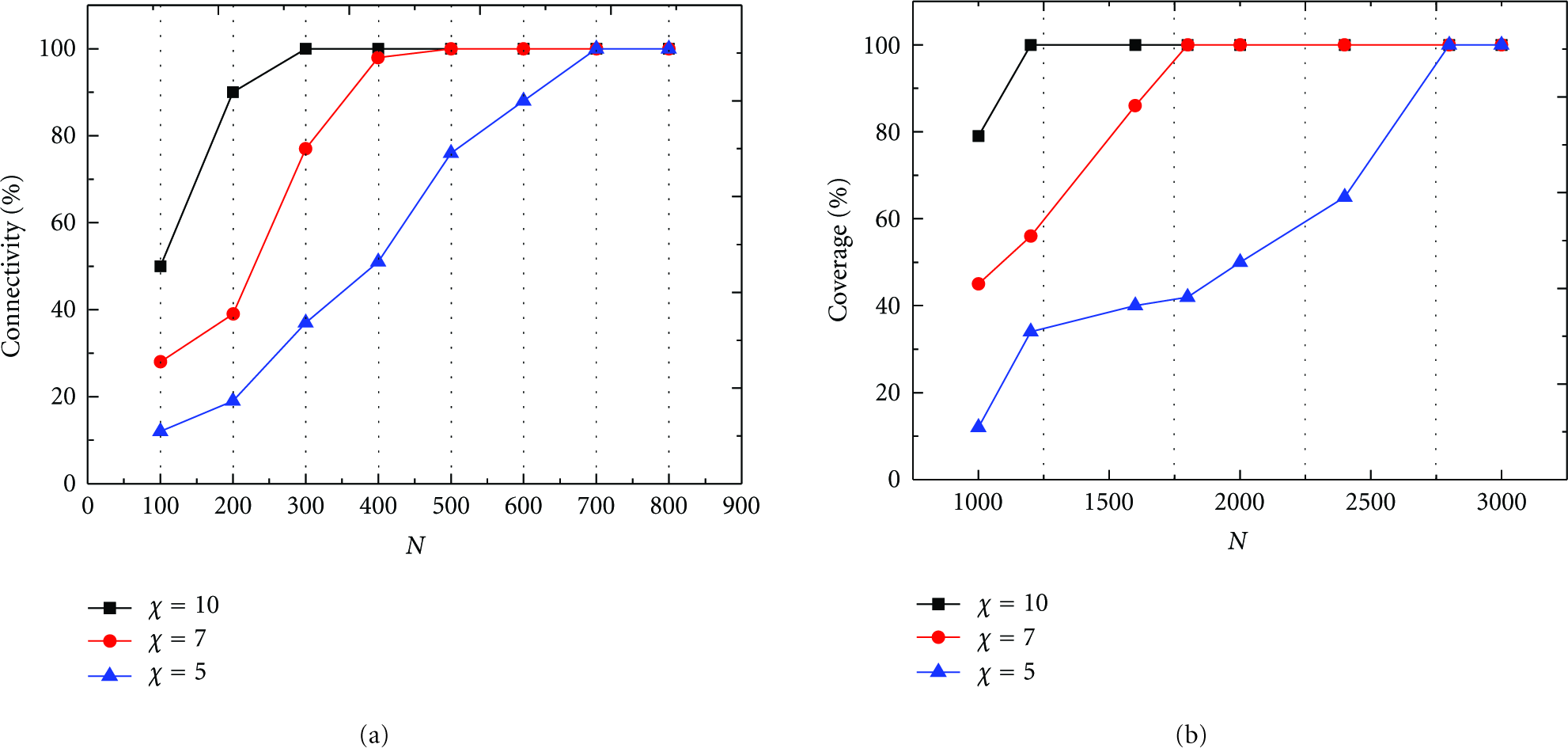
Connectivity and coverage.
Three observations can be made: (a) as N increases, both connectivity and coverage increase until 100% regardless of the value of χ. The reason for such behavior is that the deployment density of nodes must be large enough to achieve full coverage and global connectivity; (b) the plot
7.2. Average Energy Consumption
Set
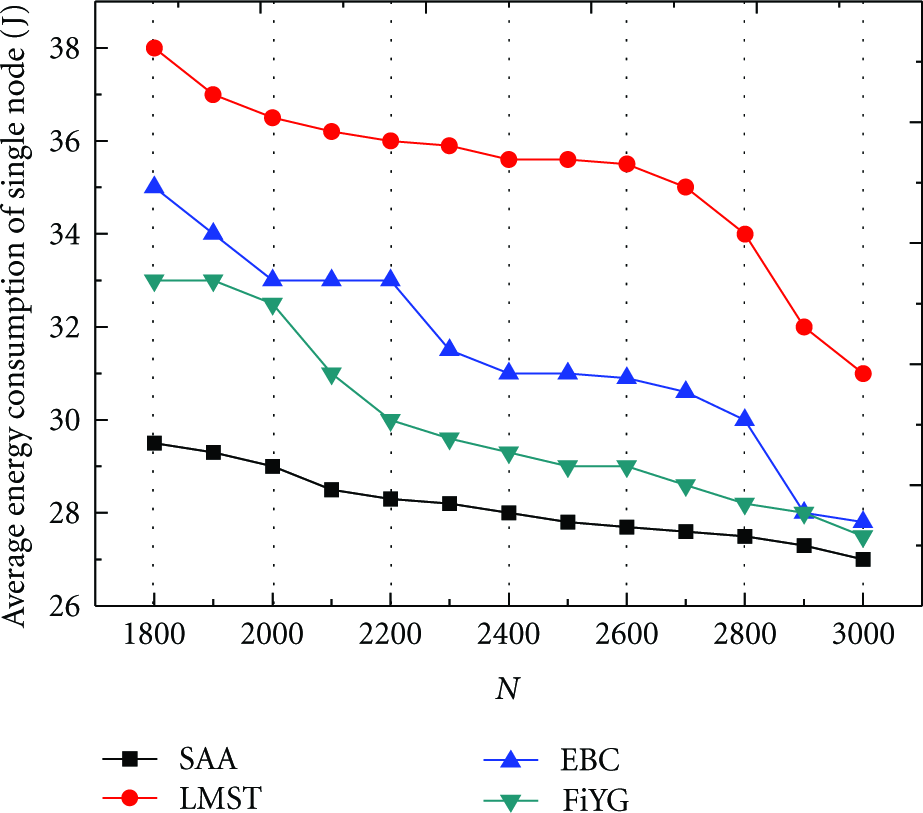
Average energy consumption.

UWSN lifetime.
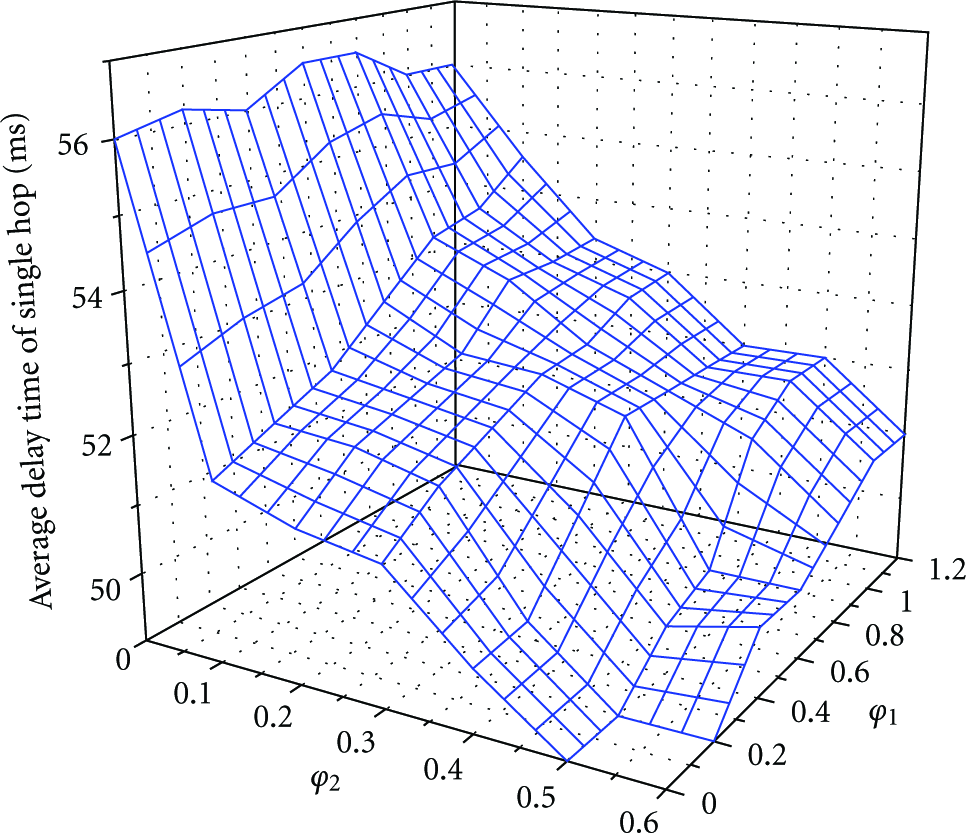
7.3. Average Delay of Single Hop
Set

Average delay of a single hop.
7.4. Influence of
and
Low energy consumption and low propagation delay are the most important and common objectives. The influence of
There are three observations from Figure 6: (a) when
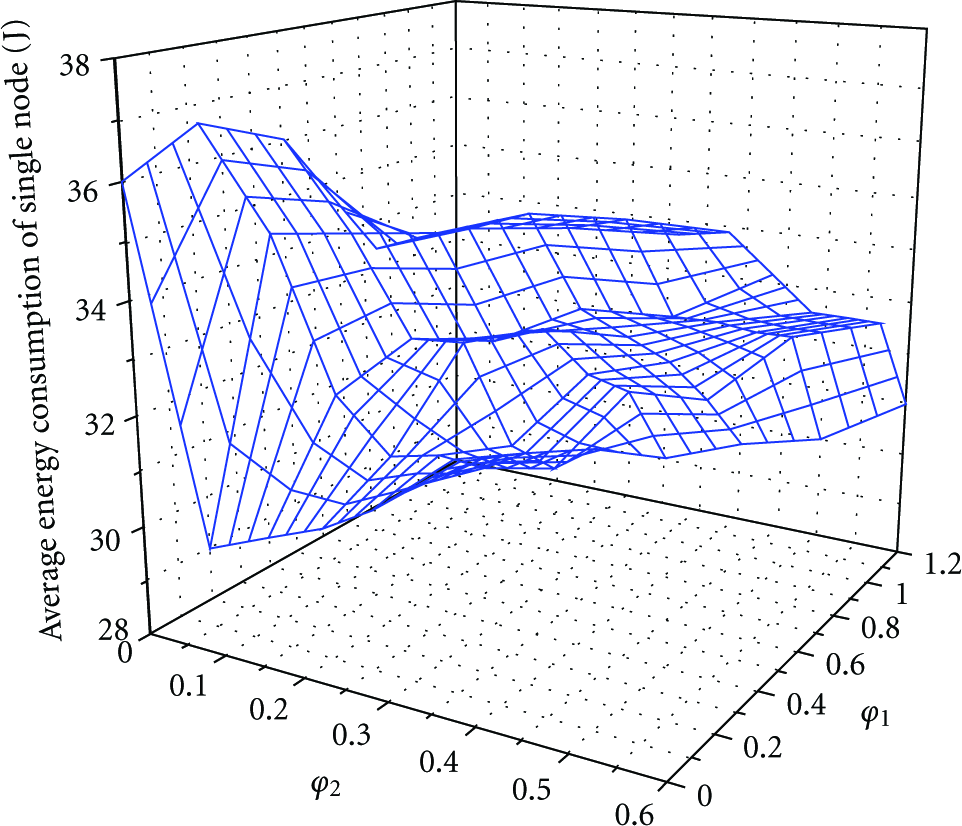
Influence of
Influence of
7.5. Average Path Bandwidth
Set

Average path bandwidth.
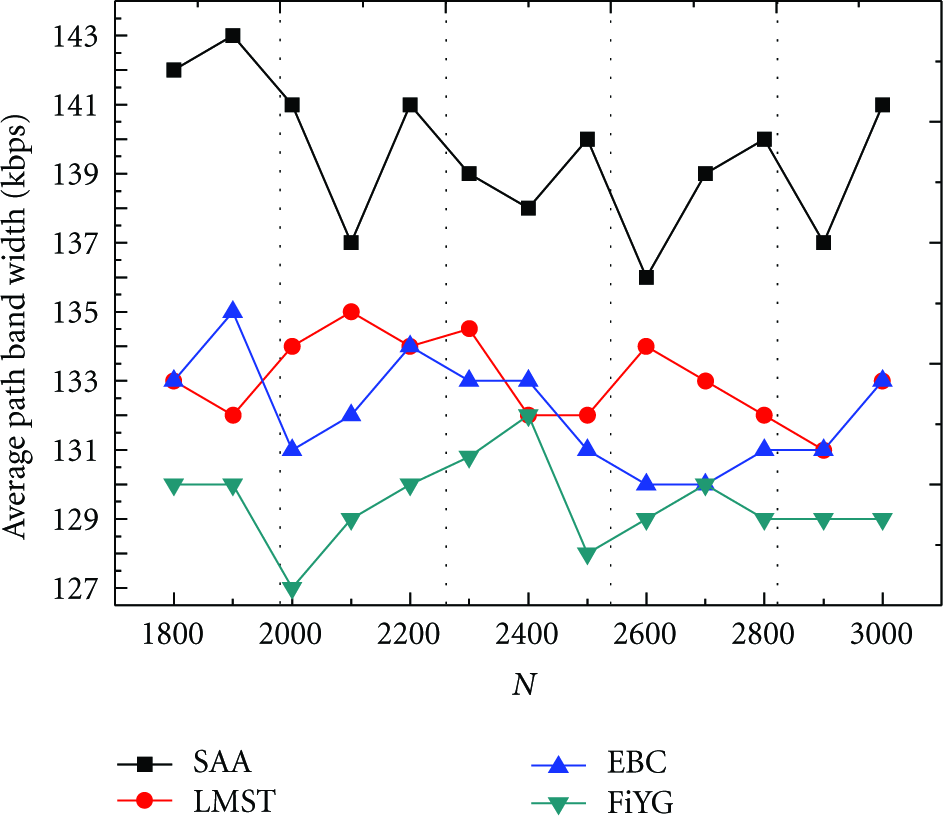
Comparison of average path bandwidth.
7.6. Average Path Transmission Success Ratio
Set
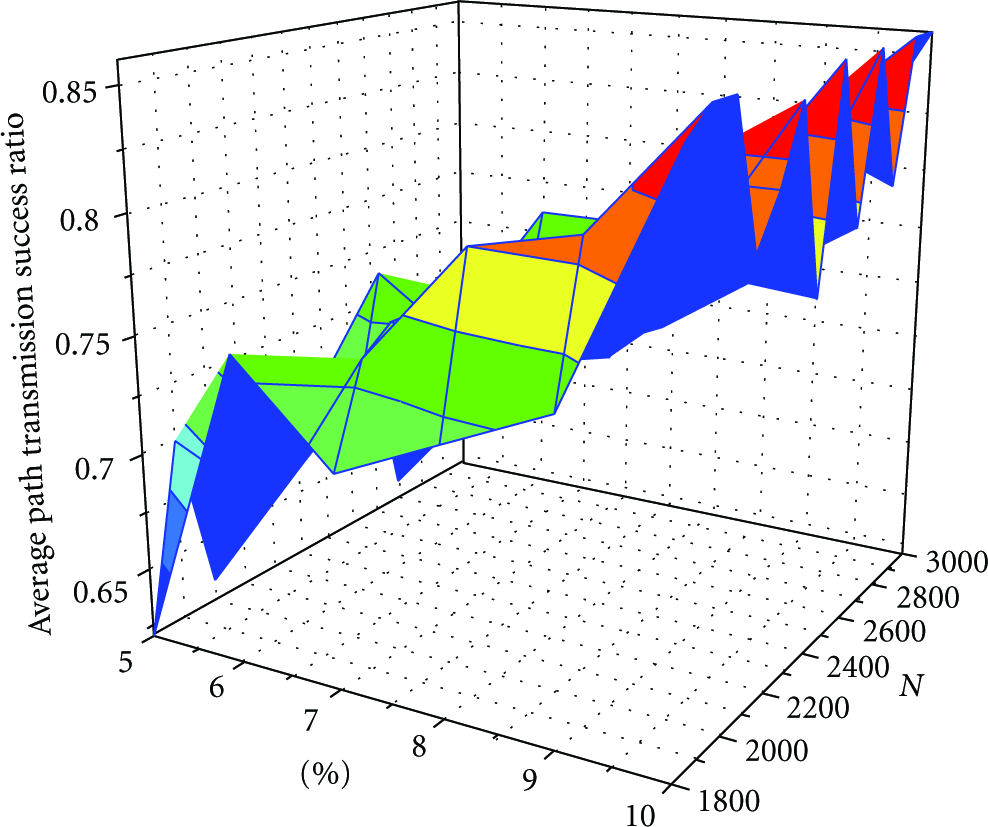
Average path transmission success ratio.
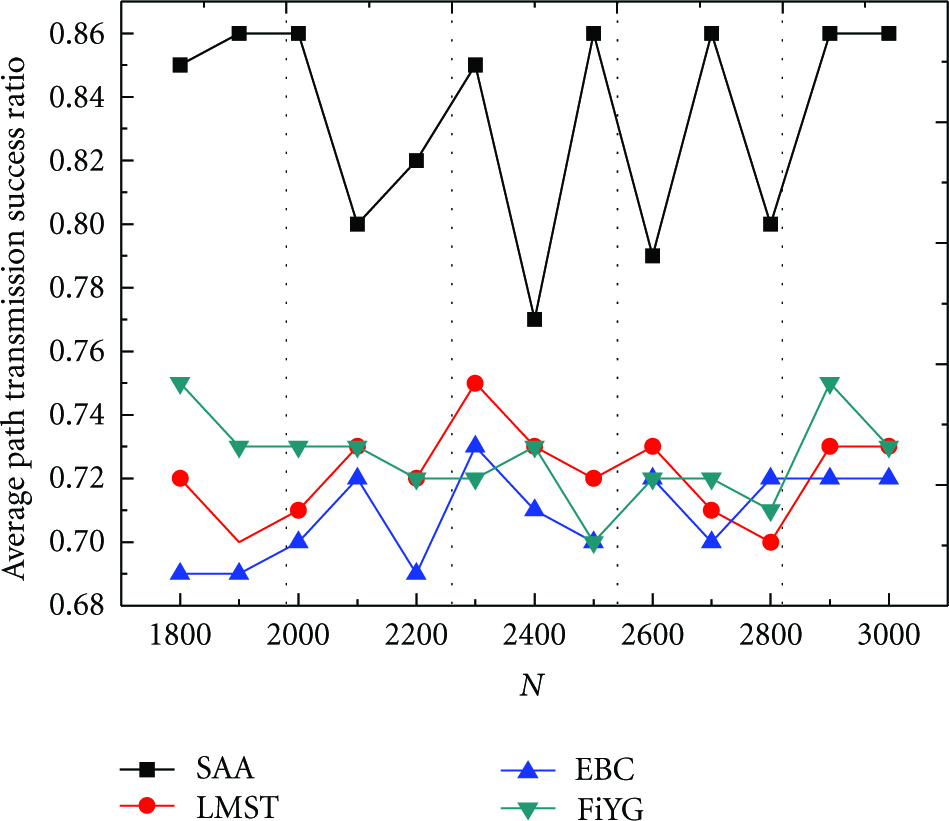
Comparison of average path transmission success ratio.
In summary, (a) the proposed algorithm SAA efficiently improves performance in terms of energy consumption, propagation delay, bandwidth, and transmission success rate while meeting both full coverage and global connectivity; (b) the simulation results indicate average energy consumption and UWSN lifetime: the average delay is optimized while N increases, whereas the average path bandwidth and average path transmission success ratios are independent of N. Therefore, SAA possesses scalability with respect to the number of nodes; (c) according to different multiobjectives of UWSN applications, SAA shows favorable performance at properly set parameters.
8. Conclusions
Aiming at the particularity of water medium and underwater acoustic communication, the QoS topology control problem was studied in this paper, and a distributed SAA was designed accordingly. SAA can exhibit outstanding performance in every typical objective. However, the UWSN model in this paper is idealistic, that is, it prohibits node mobility, and delays from calculation, energy consumption by receiving messages are neglected. Furthermore, the communication range and sensing range of nodes are irregular rather than spheres. Addressing QoS topology control in more real environments or scenarios is suggested for further study.
SAA(G( announce(); for
Footnotes
Acknowledgments
This research is supported by the National Natural Science Foundation of China under Grants Nos. 60903181, 61003236, 61003040, Talents Start Research Foundation of Nanjing University of Posts and Telecommunications under Grant No. NY208073. L. Liu also wants to acknowledge the support from the Key Laboratory of Ministry of Education for Computer Network and Information Integration (Southeast University), Nanjing, China.