
Abstract
Reduced-order modeling is a systematic way of constructing models with smaller number of states that can capture the “essential dynamics” of the large-scale systems, accurately. In this paper, reduced-order modeling and control techniques for parametrically excited MEMS are presented. The techniques proposed here use the Lyapunov-Floquet (L-F) transformation that makes the linear part of transformed equations time invariant. In this work, three model reduction techniques for MEMS are suggested. First method is simply an application of the well-known Guyan-like reduction method to nonlinear systems. The second technique is based on singular perturbation, where the transformed system dynamics is partitioned as fast and slow dynamics and the system of differential equations is converted into a differential algebraic (DAE) system. In the third technique, the concept of invariant manifold for time-periodic systems is used. The “time periodic invariant manifold” based technique yields “reducibility conditions”. This is an important result because it helps us to understand the various types of resonances present in the system. These resonances indicate a tight coupling between the system states, and in order to retain the dynamic characteristics, one has to preserve all these “resonant” states in the reduced-order model. Thus, if the “reducibility conditions” are satisfied, only then a nonlinear order reduction based on invariant manifold approach is possible. It is found that the invariant manifold approach yields the most accurate results followed by the nonlinear projection and linear technique. These methodologies are general, free from small parameter assumptions, and can be applied to a variety of MEM systems like resonators, sensors and filters. The reduced-order models can be used for parametric study, sensitivity analysis and/or controller design. The controller design is based on the reduced-order system. Thus, first the reduced-order model of the large-scale system is constructed that captures the essential dynamics. If a controller is designed to stabilize this reduced-order system, then it guarantees that the large-scale system is controlled. The theoretical framework to design linear and nonlinear controllers is also presented.
1. Introduction
Micro-Electro-Mechanical Systems (MEMS) are miniature systems capable of controlling mechanical structures. These systems are fabricated using I.C. processing technology. A lot of research initiatives are supported by the governments, automobile and space organizations to develop micro-sensors, micro-machined gyroscopes, accelerometers, switches, micro-engines, micro-pumps and so on. The numbers of MEM devices continue to grow exponentially and national attention is focused on MEMS technology and education [1].
Even though the MEMS technology has advanced a lot, enabling innovative designers to design and make new MEM devices (which were not possible a few years ago) and experimentalists to conduct various experiments for performance and efficiency evaluation, there seems to be a “gap” between the theoretical predictions and experimental results. This deviation is predominant especially when these miniature systems are operated at extreme, critical conditions. Many times these discrepancies are attributed to the flaws in manufacturing, experimental errors, human errors and scaling effects. However, if one critically evaluates the arguments presented in this regard, it is not difficult to observe that the fundamental reason behind this issue seems to be that the mathematical models developed for a particular miniature system may not be accurate enough to capture all of the dynamics. The assumptions regarding linearity, magnitude of forces, some parameters being small (correct at macro-level) may not be valid at micro-level. Thus, a MEM device based on an inadequate mathematical model or analyzed using the approximate techniques may not capture all of the dynamical effects, especially when it is used for very crucial applications like medical, defense, aerospace, safety sensors and operated under extreme conditions like large operating range, noise, as well as thermal and magnetic effects.
The mathematical models describing MEMS dynamics have lots of degrees of freedom (arising either from a complex model or descretizing the governing partial differential equations). These modes are highly nonlinear and difficult to analyze within the constraints of limited time, computational resources, efforts, and desired accuracy. One possible way to analyze these systems is by the means of “order reduction”. Order reduction is replacing the original large-scale system by an equivalent small-scale system, which is easier to analyze. The response of this small-scale system is similar to the original large-scale system and it preserves all stability and bifurcation characteristics. One can investigate the effect of change in the system parameters on the stability of this small system and extend the conclusions to the stability of large-scale system. If one designs a controller for this small-scale system to achieve asymptotic stability, a limit cycle (by means of bifurcation control) or marginal stability then the same behavior will be depicted by the large-scale system. Controlling a very large-scale system by means of reduced-order controller has lots of advantages like relatively easy controller design, less controller effort and suitability for real time implementation.
In this research effort, we concentrate upon order reduction and control issues related to time periodic MEM systems. These MEMS are described by linear or nonlinear mathematical models, where the periodic coefficients multiply the state vectors. These types of systems constitute a large class of MEMS like resonant oscillators [2–4], micro-cantilevers [5, 6], micro-flight mechanisms [7], parametrically excited MEMS based filters [8] and miniature rate gyroscopes in electrostatic force fields [9, 10]. These systems exhibit very rich and interesting dynamics and are generally described by coupled Mathieu type equations [11]. Even a single DOF system described by a linear Mathieu type equation is not easy to analyze. It has regions of stability and instability in certain parameter range. Conventionally, these types of problems are analyzed using the averaging or perturbation type approaches [11]. These methodologies depend upon assumptions that there exists a generating solution and the parametric excitation terms are small. For general MEMS, either or both the assumptions may not be valid implying that the analysis performed using these techniques may not yield accurate results and the subsequent experimental findings deviate from them.
The order reduction and bifurcation studies for nonlinear time periodic systems have not received considerable attention in the structural dynamics community and never attempted for parametrically excited nonlinear MEM system. On the other hand, there exists a vast amount of knowledge on order reduction of time invariant systems at macro-level [12]. Many MEMS researchers have attempted order reduction of MEMS using these techniques [13]. Typically, this order reduction problem is two pronged. The first one is the order reduction from structural aspect where the aim is to construct a reduced-order system that retains the structure of the original system either in the state space or in second order form. This reduced-order system is then used for response analysis [14], sensitivity analysis [15], optimization and so on. Another approach to view this order reduction problem is controller design, which is very active research area in control community [16]. Here the problem is formulated in the state space with a controller. The system order is reduced and finally the analyst comes up with a suitable reduced-order controller that can be used to control the original large-scale system.
From structural point of view, various order reduction techniques like classical Guyan reduction [17] and its extensions to nonlinear systems can be used. For nonlinear systems, the order reduction techniques based on “nonlinear normal modes” [18] (which are the nonlinear counterpart of linear normal modes) can be used. Shaw and Pierre [19] presented an alternate formulation for nonlinear normal modes by applying the center manifold theory. Afterwards Shaw et al. [20] presented a rigorous order reduction technique where the configuration subspace is confined to a high dimensional curved manifold, described by “master” degrees of freedom of the subset. Similar ideas are presented by the structural dynamics researchers [21–24] for order reduction in second order form. Gabby et al. [23] successfully implemented an approach based on basis function and presented an automated procedure for constructing reduced-order models for MEMS that captures the nonlinear effects. The same approach was modified to incorporate stress-stiffening effects [24]. Though these methodologies yield good results, they cannot be used directly for order reduction of time periodic systems.
From control point of view, quite a few order reduction techniques are available. For small linear systems, balanced truncation approximation [25], singular perturbation approximation [26] and Hankel norm approximation [27] can be used and are successfully implemented in software routines like MATLAB [28] and SILICOT [29]. These methods require solutions of the Lyapunov equations or Singular Value Decomposition, which can be a computationally demanding task. For large linear systems, order reduction algorithms based on Krylov spaces [30] are proposed. Krylov spaces, in most cases are good candidates for lower order subspace. The most popular algorithms based on Krylov space are Lancoz [31] and Arnoldi [32] methods. Another interesting approach of order reduction is Padé and Padé type approximations [33]. The objective here is to find out a rational transfer function of smaller dimension, which retains the essential behavior of the large dimensional transfer function. This is done by matching moments of the original and reduced-order transfer function around some fixed point [34]. All of these techniques are applicable to autonomous linear systems. For nonlinear systems order reduction and controller design techniques based on Proper Orthogonal Decomposition (POD) and Empirical eigenvectors [35] are proposed. The techniques based on POD are more suitable when experimental data is available.
Recently, Sinha et al. [36] presented a novel technique for order reduction of nonlinear time periodic systems based on “time periodic invariant manifold technique”. This technique is based on the Lyapunov-Floquet (L-F) transformation [37], which converts a linear time varying system into a time invariant one and at the same time preserves all stability and bifurcation properties. This approach also yields unique “reducibility” conditions, which answer very fundamental questions in order reduction. “Is order reduction really possible? and if so then which states should be retained and which should be eliminated?”. Some new techniques based on the L-F transformation and singular perturbation are discussed by Redkar, et al. [38]. From control point of view, Deshmukh et al. [39] proposed a method for order reduction of a large-scale linear system and implemented control algorithm successfully. So far, these techniques are applied to large-scale structural systems. However, preliminary results show that similar techniques can be used for order reduction and control of MEM devices. These approaches are free from “small parameter” assumption and take into account “strong” nonlinear effects. It is expected that the order reduction and control techniques based on the L-F transformation and “invariant manifold” techniques will show a new path in the research of parametrically excited nonlinear systems and reduce the “gap” between theoretical results and experimental findings. These tools will certainly help MEMS researchers to design, study, simulate, analyze, optimize and control complex parametrically excited MEMS (and possibly NEMS) systems in a better way.
2. Model Order Reduction Techniques
2.1. Order Reduction via Linear Projection
Consider a nonlinear time periodic MEM system described by

where
Applying the L-F transformation [37]

where
After the modal transformation

where
The objective of order reduction is to replace the nonlinear time periodic system given by (3) by an equivalent system given by

where
This linear projection technique assumes
2.2. Order Reduction Using Nonlinear Projection
Once again, consider a nonlinear time periodic MEM system described by

where

where
The objective here again is to approximate (6) by a reduced-order system given by

where

This transformation from (6) to (7) is achieved by means of a nonlinear projection given by (8). As before, (7) can be integrated numerically and using the L-F and modal transformation all of the states in
Depending upon the complexity of large-scale system, availability of computational power and the required accuracy of reduced-order system, one may choose the method to compute the nonlinear projection
2.3. Order Reduction Using Time Periodic Invariant Manifold
This methodology is based on the “Time Periodic Invariant Manifold Theory”. According to this theory, there exists a time periodic relationship between the dominant and the non-dominant states of the system and it is possible to replace (under certain conditions) the non-dominant states by dominant states. Thus, the order of system can be reduced.
Consider again, the nonlinear time periodic MEM system,

with all of the terms appearing in (9) being defined as before. After the L-F and modal transformation equation (9) can be transformed into (6) and further partitioned as

At this stage, we assume a nonlinear relationship between the dominant

where
Here

where
It can be shown that if the “reducibility condition” is satisfied then vector
Assuming the “reducibility condition” is satisfied, the reduced-order equation can be written as

As before, this reduced-order equation can be integrated numerically and using the L-F and modal transformation, all the states in
3. Application: A MEM Torsional Mode Oscillator
In order to demonstrate the applications of the order reduction approaches, we consider a coupled oscillator MEM sensor-actuator system. Baskaran and Turner [3, 4] have analyzed this system to study electrostatic interaction and their effect on the system stability. The scanning electron micrograph (SEM) of the system is shown in the Figure 1(a). The system is composed of two torsional oscillators actuated using electrostatic forces as shown in Figure 1(b). For design, fabrication and parameter estimation details, we refer to the papers by Baskaran and Turner [3, 4]. The mechanical equivalent system is shown in Figure 1(c), where the springs (kactuation) represent the electrostatic stiffness due to interdigitated comb fingers and the pendulums represent the MEM torsional beams.
MEM Torsional Oscillators [3].

Assuming the device is operated in vacuum and has negligible structural damping, the undamped equation of motion can be shown [3, 4] to be

where

where A, B, C are coupling constants. Depending upon the type of external forcing voltages
where

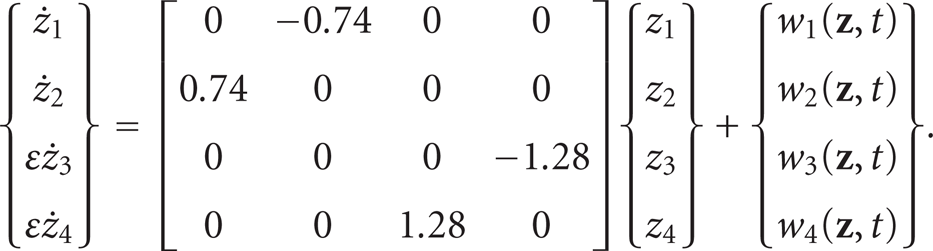
Equation (17) can be written in the state space form as

where

Applying the L-F transformation, (19) can be written as

where
For the detailed discussion on these resonances, refer to Sinha et al. [36]. These resonances are discussed in the context of this example.
3.1. The Case of No Resonance
The system parameters are chosen such that the system does not exhibit any resonance, that is, the “reducibility condition” in (13) is satisfied. The parameter set for this case is given in Table 1.
Parameter set for the case when no parametric/internal resonance exists.
For this set of parameters, the multipliers are
Using the modal transformation,

where
3.1.1. Order Reduction Using the Linear Method
Equation (22) comprises of 4 states,

Equation (23) is the reduced-order model of MEM system described by (22). This reduced-order system is integrated numerically with typical initial conditions and all the states in
Time trace comparison.
Comparison of Poincaré maps (no resonance case).

3.1.2. Order Reduction Using the Nonlinear Projection Based on Singular Perturbation Method
Once again, we take
We let ε = 0, and resorting to one fixed point iteration, as discussed earlier, z3 and z4 are approximated as

We substitute the single fixed-point iteration solution of

Equation (26) is integrated numerically and using the L-F and the modal transformation
Once again, we compare the time trace of θ1 obtained using the nonlinear projection technique with the time trace of θ1 obtained by integrating the original (19). It can be seen that these time traces (given in Figure 2(b)) match better when compared to the time traces obtained by the linear method (Figure 2(a)).
When we observe the Poincaré map of reduced system (given in Figure 3(c)) via nonlinear projection, we find that it is very close to the Poincaré map of the large-scale system (given in Figure 3(a)), but does not show a “band”. However, comparing the time traces we conclude that the nonlinear projection yields a better-reduced model than the linear method.
3.1.3. Order Reduction Using an Invariant Manifold
As discussed in Section 2.3 we try to relate the non-dominant states to the dominant states by a time periodic nonlinear transformation. If the system does not exhibit “true internal resonance” (like the case under consideration) then the “reducibility condition” is satisfied and the system order can be reduced.
We start with (22) and select the same states [

where

Here

Equation (29) is substituted into top half of (22) to obtain the reduced-order model as

This symbolic computation was performed using Mathematica. Numerical solution of (30) was carried out and the L-F and modal transformation was used to determine
Once again the time trace of the reduced-order system (θ1) obtained by this method is compared with the time trace of
3.2. The True Internal Resonance Case
For the time periodic systems, a “true internal resonance” is said to occur when some linear combination of λ
l
(the Floquet exponents of dominant states) and

where
Parameter values for the case when “True internal resonance” exists.

In this case, the “reducibility condition” is not satisfied since for ν = 0, (13) yields
However, linear or nonlinear projection based order reduction is certainly possible for small initial conditions when the nonlinear effects are not significant.Figure 4 shows comparison of error for linear and nonlinear projection based reduced-order models. In Figure 4, Error Norm
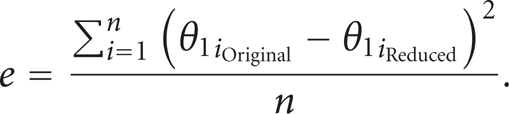
This norm was computed for n = 3000. It can be observed that for very small initial conditions, the error as defined by (32) between the responses of the linear reduced-order model and original system (shown as dash-dot line) is small. However, as the initial conditions increase and nonlinear effects dominate the response, the error becomes significant and grows without bounds. Similarly, for the reduced-order system via nonlinear projection the error norm defined by (32) is small for very small initial conditions but increases rapidly and continues to grow (shown by the dashed line) with a small change in the initial conditions. Thus, it can be concluded that we need to retain all of the states in the dynamical system and order reduction using linear or nonlinear methods does not yield acceptable results.

Comparison of Error in the case of true internal resonance.
4. Controller Design
The controller design for a MEM device is a very interesting problem. For a complex, nonlinear MEM system designing is full state controller is a very difficult task. However, one can make use of the order reduction methodologies and design a reduced-order controller, which will control the “dominant dynamics” in the system. This controller will be easier to design at the same time guarantee that the original system will meet the specifications. Application of the L-F transformation, order reduction methodologies and bifurcation studies enable researchers to design linear and nonlinear controllers. It is noted that one can design linear or nonlinear controllers using symbolic computation techniques [41, 42], Lyapunov type approach, Feedback linearization [43] and back stepping [44] to mention a few. All of these controller design approaches integrate very well to the order reduction methodology presented here. As an example, we present the theoretical framework to design a simple linear controller and nonlinear controller for the reduced-order system. There are various combinations possible like reduced-order system using linear approach along with linear or nonlinear controller, reduced-order system based on singular perturbation approach along with linear or nonlinear controller and invariant manifold based reduced-order system with linear or nonlinear approach. The detailed discussion on advantages and disadvantages of these combinations along with examples will be presented elsewhere.
4.1. Linear Controller Design
Consider a nonlinear MEM system described by

where

The system described by (34) is also a large order system. At this stage the order reduction techniques can be applied and a reduced-order system of dimension

Now consider the linear part of (35):

Assuming

with unknown gains

where
4.2. Nonlinear Controller Design
Theoretically, the necessity for nonlinear control for critical MEM systems arises only in the situation when the system has linearly uncontrollable critical modes, and all of the unstable modes are controllable. From a practical point of view, however, there may be reasons to choose nonlinear control even if the system is linearly controllable; among these reasons are better system performance and lower energy requirements that may be achieved with a nonlinear controller. It is known that sometimes performance can be significantly improved if the system is operated near a stability boundary. However, it may not be safe to do so, especially if a subcritical bifurcation occurs when the system crosses the boundary. On the other hand, if small vibrations can be allowed without causing system failure, then systems can be operated very close to the stability boundary if the bifurcation is of the supercritical type.
It should be noted that for critical systems (due to so called “resonance”) the normal form reduction cannot eliminate all of the nonlinear terms. Therefore, the resulting normal form will be not only nonlinear, but also time-dependent, in general. Thus, the nonlinear controller design to control bifurcations is an extension of bifurcation studies.
Once again, the objective is to design a nonlinear controller to control the bifurcations of the original MEM system described by large number of nonlinear differential equations with time periodic coefficients given by (34). The first step in the analysis is order reduction. Once the system order is reduced, the system dynamics is described by

This equation is same as (35) except the control vector

where

This is the simplest nonlinear form of (40), and for the codimension one bifurcations it is either time invariant or can be brought into a time invariant form by further simple coordinate transformations. For example, in case of a symmetry breaking bifurcations (when one of the Floquet multipliers is plus one and the system has a trivial equilibrium on both sides of the critical point) (41) takes the form

which is a one dimensional time invariant equation [45]. The equilibrium of this equation (and thereby the equilibrium of (40)) can be stabilized by an appropriate choice of the control parameters
5. Discussion and MEMS Application Areas
The reduced-order modeling techniques proposed in this work are general can be used for order reduction of macro as well as micro systems. They are free from small parameter assumption. We presented a MEMS case study to show how these methods can be used to simulate and study system dynamics. The example in previous section had 4 states and we reduced its dimension to 2 states. Even for a model comprising large number of states (say 100) the methodology remains the same. For systems with varying nonlinear parameters (e.g., tunable sensors and filters) this order reduction can be performed in symbolic form. It is possible to obtain a concise expression governing the dynamics of the system with symbolic nonlinear parameters. One can study the effect of change of these dominant nonlinear parameters in the operating range of the device or tune them to obtain the desired response. Typical practical applications of this approach are described below.
5.1. Parametric Resonance Based Sensors
In the case of linear oscillator with parametric excitation (when frequency of periodic term ω p and the natural frequency ω n satisfy certain integral relationship) response of the system is amplified in the form of exponentially growing solution. It is characterized by multipliers becoming either +1 or −1 resulting in zero Floquet exponents corresponding to the bifurcating states. In the presence of nonlinearity, the system undergoes bifurcation and depending upon the type of bifurcation may even become chaotic. The states undergoing resonance (and dominating the system response) corresponds to bifurcating states and must be retained in the reduced-order model. This reduced-order model is purely nonlinear and in some cases can be simplified further. By constructing the versal deformation and tuning the nonlinearity it is possible to control the post bifurcation behavior. This kind of analysis also yields useful information like effect of parameter dependence, sensitivity and robustness in the operating range.
5.2. Active Amplifiers and De-Amplifiers
Parametrically excited MEMS amplifiers and de-amplifiers have been used to increase the Quality factor of system and to suppress noise, respectively. Reduced-order modeling techniques described here can help design these systems more effectively and efficiently and provide a better understanding of dynamics. It is possible to tune the collective modes in MEMS arrays by means of controlling the bifurcation and achieve amplification or de-amplification. This approach can be used in switching where a particular MEM device can be switched on or off by simply controlling the nonlinearity.
5.3. Large-Scale Integration of MEM Devices
The ongoing efforts of developing parametrically excited MEM devices comprising of various subcomponents give rise to very complex models with very large number of states. The techniques presented here can be applied straightforwardly to reduce these complex models to simple models with less number of states. These reduced-order models can be used for experimental validation and optimization of the MEM device to obtain desired response.
6. Conclusions
In this paper, order reduction techniques for parametrically excited nonlinear MEMS are suggested that can be used to design controller. All order reduction techniques make use of the L-F transformation that produces equivalent systems with time invariant linear parts but the nonlinear parts remain time-periodic. These approaches do not restrict parametric excitation to be small.
The first procedure is a linear technique that can be considered as a state apace version ofthe “Guyan Reduction” where the entire non-dominant dynamics is neglected. As an improvement over the linear technique, a “nonlinear projection method”, based on singular perturbation, is suggested. The “invariant manifold technique” is a nonlinear order reduction methodology similar to the concept of “Time Periodic Center Manifold Theory”. It also yields a “reducibility condition” that determines whether (or not) an order reduction is possible. Reduced-order models constructed from this method capture the dynamics of original large-scale system very accurately in comparison with the other two approaches. As an extension to order reduction, linear and nonlinear controller design approaches are also suggested that integrate well with the order reduction methodologies presented here.
These reduced-order modeling techniques are applicable to general nonlinear time periodic MEM devices. They can provide computable, efficient procedures for order reduction, bifurcation studies and control and convenient for implementation on digital computers and real time application.
In conclusion, it can be stated that some possible techniques for order reduction of general nonlinear time periodic MEMS undergoing strong parametric excitation have been suggested. Some immediate applications in the active area of MEM sensors and amplifiers are also discussed. Several extensions, generalizations and applications are in progress.