
Abstract
The paper proposes a new approach based on reciprocal screw theory to analyze kinetostatics of lower-mobility parallel mechanisms with overconstraints and static indeterminacy. For force analysis of parallel mechanisms, the main reactions should be solved firstly, and then all other constraint reactions are easy to be obtained. The approach can remarkably reduce the number of unknowns and keep the number of simultaneous equilibrium equations not more than six each time. For static indeterminacy, it also needs to set some complementary equations. All active forces and constraint reactions of the kinematic pairs can be simultaneously obtained by analyzing the equilibrium of everybody one by one. A 4-R(CRR) parallel manipulator with collinear-force static indeterminacy is taken to introduce the method, which indicates that the method is simple and effective.
1. Introduction
Force analysis of lower-mobility parallel manipulators (PMs) is one of the important steps for mechanism design, simulation, and control. It generally needs to solve for active forces and constraint reactions of all kinematic pairs. Force analysis contains statics and dynamics. Only the statics analysis is needed when the device moves at low speed. However, when it moves at high speed, the inertia forces of links cannot be neglected, and it needs dynamics analysis.
The issue has attracted huge attention in the community. Tsai [1] presented the statics and dynamics of parallel mechanisms; Merlet [2] discussed the dynamics of PMs. Zhang and Gosselin [3, 4] discussed a general kinetostatic model of PMs. Gallardo et al. [5] solved the dynamics of PMs by screw theory and the principle of virtual work. Ider [6] developed a method for the inverse dynamic solution of PMs in the presence of drive singularities. Li et al. [7] presented a method for the inverse dynamic formulation of the 3-DOF modules of two PMs. Russo et al. [8] discussed the static balancing of parallel robots. Sokolov and Xirouchakis [9] presented a dynamics analysis of a 3-DOF PM. Lu et al. [10] solved active and passive forces of some PMs. Callegari and Cammarata [11] discussed the dynamics of a 3-CRU parallel robot. Jaime et al. [12] approached the dynamic analysis of 2(3-RPS) manipulator via screw theory and the principle of virtual work. Zhou et al. [13] studied the static solving of a 3-DOF 3-RRR parallel mechanism. The statics of spatial mechanisms can be traded by various methods, such as the vector method [14], the dual vector and dual number quaternions [15], the screw calculus [16], and the principle of virtual work [17]. For dynamics analysis, the principle of d'Alembert is one of the common methods.
Most of the above-mentioned literatures only analyzed the actuator forces of lower-mobility PMs, but few discussed constraint reactions of kinematic pairs. The reaction analysis is very useful; however, it is quite complicated. Tsai [1] successfully analyzed constraint reactions of all the pairs for a serial robot by static equilibrium of free-body diagrams. Recently, we note that Lu [10] only discussed parts of constraint reactions of a mechanism, which is not overconstrainted. In many applications, PMs not only have lots of kinematic pairs and unknowns but also are overconstrained and statically indeterminate, which increase the complexity and difficulty of reaction analysis. Particularly, the unknowns are correlative, and they oblige us to set high-order matrices. For example the number of the unknowns of a 5-DOF 5-5R PM is 130. However, the number of its available equilibrium equations is only 126. Especially, for the simple 3-RRR spherical PM, the order of its static indeterminacy is up to six. For the static indeterminacy, it needs to set some complementary equations. Note that the static indeterminacy of the lower-DOF PMs can be classified into two cases: collinear forces and coaxial couples, and their analyses are also different. From this point of view, the issue is a completely new problem in the community.
This paper proposes a new simple and effective approach to analyze both the active forces and constraint reactions based on reciprocal screw theory. For this method, the main reactions should be solved firstly, and then all other constraint reactions are easy to be obtained. The method is able to remarkably reduce the number of unknowns and keep the number of simultaneous equations not more than six each time. All the constraint reactions are easy to be simultaneously obtained by analyzing the equilibrium of each body one by one. We name this case as force decoupling (see Section 3). Another merit of this method is the actual axes acted about by reaction forces and moments can be clearly determined from screw theory before the numerical calculation, and it is useful for other mechanism analyses and designs including singularity research.
A 4-DOF 4-R(CRR) parallel mechanism [18] is analyzed as an example. This manipulator is symmetrical [19], and the moving platform has two translations and two rotations. The 4-R(CRR) PM, which belongs to the case of collinear constraint forces, is of overconstraints and static indeterminacy.
2. Structure Description
2.1. A 4-R(CRR) Parallel Mechanism
The 4-R(CRR) parallel mechanism, as shown in Figure 1(a), consists of a moving platform, a fixed platform, and four identical branches with four kinematic pairs, R, C, R, and R. R indicates the revolute pair; C, the cylindrical pair, is equivalent to two single-DOF pairs, R and P (prismatic pair). The axis of the first pair R in each branch is normal to the base, and the axis of the second pair C is parallel to the base. The axes of the last three pairs intersect at a center point. The four branches have two center points, m and e.
The 4-R(CRR) mechanism

The moving platform and the base are both square. The global coordinate system O-XYZ, moving system o-xyz, and limb systems
2.2. Mobility Analysis
In order to analyze the mobility, the Modified Grübler-Kutzbach Criterion [20, 21] based on screw theory [22, 23] is used. For the method, overconstraints are divided into two parts: common constraints and parallel constraints. They are named as the common constraint factor d and the parallel constraint factor ν, respectively. The Modified G-K Criterion is written as

where M denotes the mobility; n is the number of links including frame; g is the number of kinematic joints; f i is the number of freedoms of the ith joint. d is the common constraint factor:

λ is the number of the common constraints of the mechanism. The common constraint is defined as a screw reciprocal to all the kinematic screws in the mechanism. ν is the number of the redundant constraints of the whole mechanism subtracting the number of the common constraints having been accounted. The redundant constraints of the whole mechanism can be obtained by screw analysis.
For 4-R(CRR), one of its limbs, say i, is shown in Figure 1(b). Its five single-DOF pairs are expressed into screw Plücker coordinates in
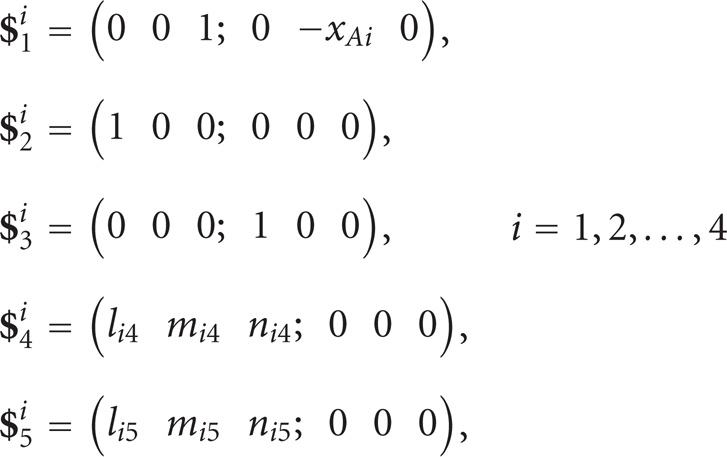
where x A,i relates a geometrical parameter and l i,j , m i,j , and n i,j are direction cosines, where j indicates the serial number of the kinematic pair in limb i. However, the values of x A,i ,l i,j , m i,j , and n i,j are not important for mobility analysis.
The five-screw system, Equation (3), has one reciprocal screw:

where
Then four identical limbs exert four constraint forces in total on the same platform but passing through two different points, e and m. In the global system O-

where x m , y m and x e , y e relate to the geometrical parameters of the mechanism.
The four screws compose a constraint screw system

From

Therefore, the mechanism has four degrees of freedom.
From the analysis we know that the platform is simultaneously acted upon by two linearly independent parallel constraint forces, which constrain one translational motion along Z-axis and one rotational motion about the normal direction of the plane determined by the two forces. Therefore, the mechanism is able to translate along two directions, X and Y, and rotate about two axes, X and Z.
After any possible motion including translation or rotation of the platform, the screw systems and the Modified G-K Formula denoted by (3)–(7) are all invariable. Therefore, the mobility is global.
2.3. Selection of Active Pairs
For the 4-DOF mechanism it needs four inputs. The input selection principle is that after locking all the selected inputs, if the platform is subjected to six linearly independent constraints in total and has no remnant freedom, the selection is correct; otherwise, it is wrong. From this point of view, there are many different selections. Here, the first revolute pairs of limbs 1, 2, and 3 and the single-freedom revolute pair of the cylindrical pair in limb 4 are selected as the four inputs. To prove the correctness of the selection, the selected four pairs need to be locked, and then the following analysis is carried out.
For limbs 1, 2, and 3, each limb-screw system has only four screws, that is the last four screws in (3). With respect to the limb coordinate system, the four screws are
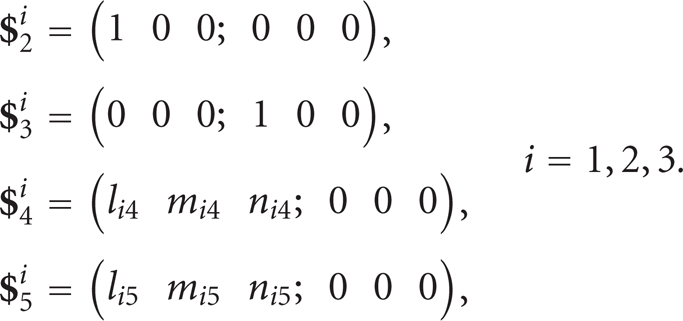
Two reciprocal screws of (8) are
For limb 4, when the revolute part of the cylindrical pair is loked, the limb screw system becomes

Reciprocal screws of (10) are as follows:

where the first one is a constraint force and the second one is a constraint wrench with pitch
Since
3. Force Analysis
The position, velocity, acceleration, and inertia force/moment of the mechanism should be determined before further force analysis, for which we can refer to [20, 24] or many other literatures.
The kinematic pairs connecting the platform and the limbs are named as the main kinematic pairs or main pairs, and the reaction in the main pair is named as the main-pair reaction or main reaction. For force analysis, the main reactions should be solved firstly, and then all other constraint reactions are easy to be obtained. In order to analyze the main reactions, it needs to calculate the main reactions brought about by all the external forces acting on the platform and on different limbs one by one, respectively and then summate them by superposition principle.
In general, everybody is acted upon by gravity, inertial force, and other external forces/moments, and all the forces can be vectorially summated as one 6D external force acting on the body. Our method is based on the principle of d'Alembert and the steps are as follows:
Analyze the mobility and select all the input pairs;
Analyze the inertia force of each body based on [20, 24], if necessary, and then summate the inertia force, gravity and other external forces of each body to get the 6D resultant external force of that body.
Analyze the reactions of main pairs produced by the external forces only exerted on the moving platform.
Analyze the reactions of main pairs produced by the external forces only exerted on the links of limbs one by one.
Respectively, summate the main reactions obtained in steps (iii) and (iv), by the superposition principle to get the final main reactions.
All the active couples and constraint reactions of other kinematic pairs can be directly obtained by setting corresponding equilibrium equations of the limb links one by one.
Since the 4-R(CRR) has thirteen movable bodies, twelve R-pairs, four C-pairs, and four unknown inputs, the number of unknowns is
3.1. Force Expression
Generally, every body may be subject to forces including external forces, inertia force and gravity, and so forth, and then the 2nd step of the last Section is needed for every link. Nevertheless, without loss of generality, for brief introduction, we only consider that the 2nd step has been completed and the given forces are only the resultant external forces acting on the platform as well as on link
Let
where
3.2. Main-Pair Reaction
3.2.1. Main-Pair Reactions Produced by Platform Force
Equations (9) and (11) denote main reactions, and each main pair contains two reactions.

Free-body diagram of the platform (1)
However, the maximum linearly independent number of the eight constraints is six. From this point of view, there are only six independent unknowns and the issue is solvable.
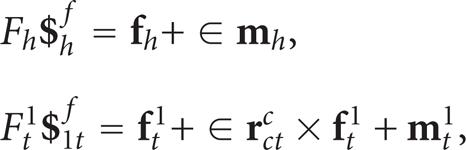
Here, we use
Considering the equilibrium of the platform, we have

Equation (13) is a screw equation and it is equivalent to six linear equations. The six unknowns can be solved.
If we use the traditional approach, each R pair has five unknown reactions and there are twenty unknowns corresponding six equilibrium equations of the moving platform. It is insolvable directly. Therefore, for solvability, it has to consider the equilibrium of other bodies, even all other bodies simultaneously. Considering the situation, this may be named as force coupling. Obviously, the new method described here is able to reduce unknowns and makes the solution decoupled and easy.
From (13), we can solve the six unknowns including
However, in order to simplify the analysis and considering our core object not for stiffness analysis, here a hypothesis is given; that is, the stiffness proportion of the two parts is η. Therefore, the complementary equations are as follows [25]:

3.2.2. Main-Pair Reactions Produced by Limb Force
Suppose that link
The sub-mechanism and link t in branch 1

Reactions of revolute pair at a1. The R pair at a1 connects link

It is still a 4-DOF mechanism. There are only three input pairs in the subchain. After the three input pairs are locked, it has one freedom. Respectively, the platform of the submechanism is subjected to five constraints. From (9) and (11), the five linearly independent reactions include
In the system m-

where
The five-system is denoted as

where

Therefore the twist system of the sub-chain is a two-screw system including the screws in (17) and (18). Reciprocal screws of the system are four main reactions (pink) acting on link

where

Suppose that the four screws with their intensities are expressed as
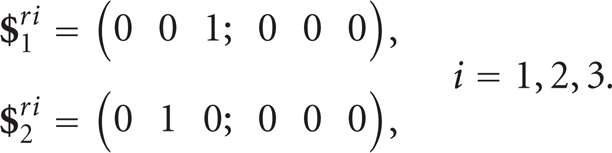
(2) Reactions of revolute pair at b1. Reactions of the revolute pair at b1 are determined by analyzing the subchain RCR in limb 1. When the input pair is locked, there are only three basic pairs, whose screws are just the three screws in the middle of (3). Their three reciprocal screws, constraints, in the limb system are written as follows:

where
Suppose that we use
(3) Equilibrium of link a1 b1. As shown in Figure 3(a), the reactions of the revolute pairs at a1 and b1 of limb 1 can be obtained. The equilibrium equation with six unknowns of link

In the equation, there are six linearly independent unknowns and the main-reactions are solvable. From (22)
(4) The external force acting on link


Free-body diagram of the platform (2) (Red denotes unknowns)
How to obtain

Nevertheless, comparing with (14), it is clear that
3.2.3. Resultant Main-Pair Reactions by Superposition Principle
In Sections 3.2.1 and 3.2.2, main reactions brought about by the platform force and limb force have been solved by (13), (22), and (24). From superposition principle the resultant reaction at point a1 is

The resultant main reaction at point a i , i = 2, 3, 4 is
3.3. Active Moments and Reactions of Other Pairs in Limbs
When the constraint reactions of the four main pairs are obtained, the four active moments and reactions of other pairs can be easily obtained by solving the equilibrium equations of the links in every limb from up to downone by one. If it does not need to calculate the constraint reactions of pairs in limbs, the active forces can be directly obtained by the principle of virtual work. Actually, when the forces of the main joints are solved, each limb becomes a serial-chain, and its dynamics analysis would be much simple by directly setting equilibrium of each body. However, here we want to show the number of equilibrium equation can be less than six by this method.
3.3.1. Reactions of Revolute Pair at b i
Resultant main-reactions of the revolute pair at a
i
have been got by (13), (22), and (24), then for obtaining the total unknown reactions at b
i
we have to set the equilibrium equation of link
For limb 1, there are ten forces acting on link
where
For limbs 2, 3, and 4, considering (13) and (24), the balancing equation with three unknown reactions of link

3.3.2. Reactions of Cylindrical Pair at c i
For analyzing the reactions of the cylindrical pair at c i , it needs to consider the kinematic chain RC in each limb.
Limbs 1, 2, and 3. The 1st pair at A i is the active pair; Figure 5(a). When the actuated joint is locked, there are only two single-freedom pairs, R and P in chain RC. The twist system includes the 2nd and 3rd screws in (3), and their four unknown reciprocal screws (pink) are

where
Free body diagram of link

Assume that the four reaction screws of the cylindrical pair at c
i
in (30) are denoted as

Limb 4. The single-freedom revolute pair of the cylindrical pair is the actuated joint and can be locked similarly like the section above. However, here we prefer not to lock the input and consider that there is an unknown applied force,

Considering the equilibrium of link

where
3.3.3. Active Moments and Reactions of Revolute Pair at A i
In the limb system, the R pair has five constraints, such as

where
Assume
For limbs 1, 2, and 3, Figure 6(a), the equilibrium equation with six unknowns including input couple of link
Free body diagram of link u in limbs.


For limb 4, Figure 6(b), the equilibrium equation with five unknowns of link

where
4. Numerical Example
Assume that the distance Oo is 0.55 m; l
a
=0.4 m, l
A
=0.9 m; vector

The constraint screws in (13) are as follows:

The results of the active moments and reactions are listed in Table 1.
The results of active moments and constraint reactions of the kinematic pairs.

5. Discussion
Based on the mobility analysis, Equation (2), the number of overconstraints of the 4-R(CRR) mechanism is two. As the mechanism has 13 links including the frame, 12 revolute pairs and 4 cylindrical pairs, as well as 4 unknown active moments, the number of its unknowns, u, and the number of equilibrium equations, e, are as follows

It means there is a static indeterminacy, and we need two extra complementary equations, which could be set based on the theory of elastic mechanics. If so, the problem is solvable theoretically. However, in this case we should set a system of 80 equations including two complementary equations and solve the matrix with the rank up to 80. Evidently, it is very difficult.
In order to avoid the high-rank matrix and reducing the unknowns the new method is proposed. Firstly, based on screw theory the unknowns could be reduced. Secondly, when there are two external forces acting on two different bodies, the force analysis should carry through one by one. As shown in 4-R(CRR) example, first, we only consider the force acting on the platform, and two complementary equations, Equation (14), are needed. Then, consider the external force acting on link 1, another two complementary equations are needed, too, as (23) and (25). Therefore it needs four (actually three) complementary equations in total for this example. That means that the force analysis needs two complementary equations each time. Therefore, the total number of complementary equations may be more than the difference between the numbers of unknowns and equilibrium equations.
6. Conclusion
Based on reciprocal screw theory, the kinetostatic analysis method of parallel mechanisms with special static indeterminacy containing collinear forces has been investigated in the paper. Our method can remarkably reduce the number of unknowns and the number of simultaneous equilibrium equations is not more than six each time. All active forces and constraint reactions of kinematic pairs are easy to be simultaneously obtained by analyzing the equilibrium of everybody one by one. The solution steps are also very clear.
The typical 4-DOF 4-R(CRR) parallel manipulator with special static indeterminacy containing collinear forces has been taken as an example to introduce this strategy. After analyzing screw systems, determining main-reactions and setting complementary equations, all the active forces and constraint reactions of the kinematic pairs are simultaneously solvable. Evidently, the forces are decoupled by the method. Therefore, the method can avoid setting complex high-order matrices.
The complex special static indeterminacy of lower-DOF parallel mechanisms still calls for further research as an open problem.
Footnotes
Acknowledgments
This research is supported by NSFC (50875227). The authors would like to express their gratitude to Professor X. Z. Bai for valuable discussions.