
Abstract
This paper focuses on the optimization of the McGill Schönflies Motion Generator. Recent trends on optimum design of parallel robots led us to investigate the advantages and disadvantages derived from an optimization based on performance indices. Particularly, we optimize here two different indices: the kinematic conditioning and the inertial conditioning, pertaining to the condition number of the Jacobian matrix and to that of the generalized inertia matrix of the robot, respectively. The problem of finding the characteristic length for the robot is first investigated by means of a constrained optimization problem; then plots of the kinetostatic and the inertial conditioning indices are provided for a particular trajectory to be tracked by the moving platform of the SMG. Deep connections appear between the two indices, reflecting a correlation between kinematics and dynamics.
1. Introduction
In recent years researchers and industry have been paying more attention to parallel-kinematics machines (PKMs) with reduced mobility [1–4]. The growing search for high performance in terms of accuracy, precision, maximum acceleration, and ease in control revealed some limits of PKMs with full mobility to accomplish certain types of tasks [5]. The main characteristic of a PKM with reduced mobility is a reduced number of limbs with respect to a six-degrees-of-freedom (dof) PKM. This aspect yields a reduced weight of the global structure, which leads to an enhanced performance of the moving platform (MP). Besides, this feature implies a lower complexity of the architecture, which leads a lower risk of limb collisions, while increasing the workspace. Obviously, robots of this type are designed for specific applications and cannot perform the general tasks of their six-dof counterparts. Then again, industrial tasks usually call for specific types of motions; that is, not all dof of the MP are necessary. Some applications, as pick-and-place, drilling, riveting, assembling, painting, and so on, call for three to five dof. If a particular task required more dof than those provided by a single PKM, two or more PKMs might be assembled to cooperate. Unfortunately, the simpler architecture of these robot does not translate into a simpler analysis. The main issues lie in type synthesis, which excludes the use of the intuition at the conceptual design stage; a more systematic synthesis procedure of this new class of robots is needed [6].
Achieving high performance involves optimization in terms of kinematics and dynamics. Essentially, a performance index is a scalar function related to the kinematic or the dynamic performance of a robot. Kinematic-performance indices are mainly based on the robot Jacobian matrix. Various performance indices based on the Jacobian matrix have been proposed: we cite the conditioning of robotic manipulators [7–9], or the concept of manipulability, as proposed by Yoshikawa [10], is an attempt to measure the distance to singularity of the Jacobian matrix of a robot. One of the most frequently used performance indices, the kinetostatic conditioning index, is based on the condition number of the Jacobian matrix [11]. We refer to [12–14] for a summary of the aforementioned kinematic-performance indices.
We shall devote our paper to only the kinetostatic conditioning index, the one studied most intensively.
Most of the dynamic performance indices have been derived through analogy from the kinetostatic indices. As a matter of fact, the dynamic conditioning index is obtained similar to the kinetostatic conditioning index by replacing the Jacobian matrix with the generalized inertia matrix (GIM). By the same token, Yoshikawa introduced the dynamic manipulability measure as the counterpart to his kinematic manipulability [15]. Wiens et al. [16] proposed some indices for the measure of the nonlinear inertia forces while Khatib and Burdik [17] defined the isotropic acceleration as the greatest magnitude that the acceleration of the end-effector can reach in any direction starting from a given manipulator configuration. Ma and Angeles introduced the dynamic isotropy of an n-dof serial manipulator and the “dynamic conditioning index” as a measure of the latter [18]. Di Gregorio and Parenti-Castelli proposed the use of three homogeneous coordinates, chosen among the operational-space coordinates, for the definition of a three-dof-manipulator GIM to be used in the determination of the dynamically isotropic configurations meaningful for three-dof-manipulator design [19]. Di Gregorio studied two-dof mechanisms and defined some indices that characterize the dynamic isotropy of these mechanisms [20].
In this paper the case of the McGill Schönflies-Motion Generator (SMG) is analyzed to apply the concepts of kinetostatic and inertial conditioning.
First, a brief description of the robot is provided. Then, the concept of characteristic length for positioning and orienting robots is recalled and adapted to the case of the McGill SMG. Further, a constrained optimization problem is set to find the posture of the robot with a Jacobian matrix and a GIM of minimum condition number. Finally, the same indices are analyzed while the robot moves along a standard trajectory, the test-cycle trajectory, to show that it would be possible to find an optimum location for the said trajectory where the indices attain minimum values.
2. Robot Description
Here a brief description of the McGill SMG is given, further details being available in [21]. The McGill SMG is a parallel robot for SCARA-type motions: its moving platform can undergo three independent translations and one rotation about a vertical axis. A CAD model is shown in Figure 1, where one can distinguish the different parts composing the robot. Starting from the top of the fixed frame, each limb is composed of two motors, an epicyclic gear train (EGT), a right-angled gear box (RGB), and an R∏∏R kinematic chain. Then, the two chains, one for each limb, are coupled to a moving platform (MP). The EGTs and the RGBs are made of steel, while the two brackets, referred to as the distal and the proximal brackets, links of the R∏∏R chain, are fabricated of aluminum. Finally, the ∏ joints are slender plate elements fabricated of carbon-fiber to make these joints lighter.

CAD model of McGill Schönflies Motion Generator.
Figure 2 shows the kinematic chain of the SMG. Hereafter, we will refer to the set of angles

Kinematic chain of McGill Schönflies Motion Generator.
In Table 1 the notation used throughout the paper is described. All symbols with double subscript, comprising one Roman and one Arabic numeral, refer to the limb number, I or II, and to the corresponding item of the respective arm. In Table 1,
Nomenclature.

We will not dwell on the derivation of the kinematics and dynamics model of the SMG, described in detail in [21].
3. The Characteristic Length
Before starting with the conditioning-index definition, we recall the kinematics equation of a parallel robot:

which relates the array of actuated joint rates

as derived in [21]. It is noteworthy that

where
For robots accomplishing positioning and orienting tasks, like every SCARA, and the SMG is a parallel version thereof, the Jacobian bears different units, thus preventing the computation of the Jacobian condition number for optimization tasks. In order to remove the dimensional inhomogeneity, a characteristic length is introduced. The characteristic length is defined as that normalizing length that renders the condition number of the Jacobian matrix a minimum [12]. As we will explain in detail in this section the condition number of the Jacobian matrix is bounded from below by unity but unbounded from above. Two situations can occur: robots whose Jacobian condition number can attain the minimum value of unity at one or more postures, termed isotropic robots, and robots whose Jacobian condition number attains a minimum larger than unity, at certain postures. Isotropy is not the rule but depends on the robot architecture.
It has been demonstrated that for spatial serial manipulators the characteristic length is the root mean square of the distances of the revolute axes to the operation point when the robot finds itself at a posture of minimum condition number [23]. For parallel robots this geometric condition has not been found, although the original definition still stands. Finding a formula for the characteristic length is possible only for simple cases; more generally, the characteristic length is calculated via an optimization procedure.
The problem we solve here is formulated as follows: given a manipulator with a prescribed architecture, find its characteristic length as that which renders the Jacobian dimensionless and its condition number a minimum at an optimum posture. As the characteristic length is strictly connected to the concept of condition number of a matrix, that is, the Jacobian matrix, we briefly recall some pertinent concepts. It is noteworthy that the concept of condition number of a matrix is meaningful if and only if all the matrix entries bear the same physical units. The simplest definition of condition number is based on the matrix 2-norm, namely, [22],
where

where, for SMGs,

which is the weighted Frobenius norm of a 4 × 4 matrix, as the Jacobian at hand has four nonzero singular values. Using (6), κ
F
(

We recall further that κ
F
(

Once again, a robot is termed isotropic when the condition number of its Jacobian reaches its minimum value of unity. It should be underlined that the condition number is configuration-dependent, and so, a manipulator can attain isotropic configurations only at certain points of its workspace if its design so permits.
For the McGill SMG we will set a constrained optimization problem to find its characteristic length L and its minimum condition number. Firstly, let

Now, after introducing the vectors

subject to the constraints:


where z
J
is the z-component of
It is noteworthy that the minimization problem is set for all configurations inside the workspace of the robot. As the moving platform has four dof, that is, three translations and one rotation, we might give a complete representation of the workspace only in a four-dimensional space. To overcome this issue we will recur to the constant orientation workspace representation, that is, the reachable volume attained by the operation point of the MP, its centroid in our case. In Figure 3 the said workspace is plotted for different values of the angle of rotation of the MP.
Constant orientation workspace of the McGill SMG.

The results of the minimization problem are reported in Table 2 and Figure 4. As we can see, two postures, symmetric with respect to the YZ-plane, in which the robot Jacobian matrix attains minimum condition number κ
F
(
Postures with optimum condition number and characteristic length.

Optimum symmetrical configurations for minimum condition number.

Apparently, the condition number κ
F
(
4. Inertial Conditioning
Germane to the kinematic conditioning, the concept of dynamic isotropy relates to the GIM
where
Usually, the units of the GIM depend on the generalized coordinates chosen to describe a mechanical system. In robotics, for control purposes, it is often convenient to make these coincident with the actuated-joint variables. Therefore, the entries of the GIM of a robot can bear disparate units. The McGill SMG is actuated by two pairs of motors, all entries of
The global GIM

All parameters used to obtain these matrices are recorded in [21], the corresponding expressions derived in the same reference.
We formulate now an optimization problem to find the posture of the SMG at which its GIM attains its minimum condition number κ
F
(

subject to the same constraints introduced in (11a)-(11b). It is noteworthy that the global GIM is a 4 × 4 matrix whose entries bear all units of kg m
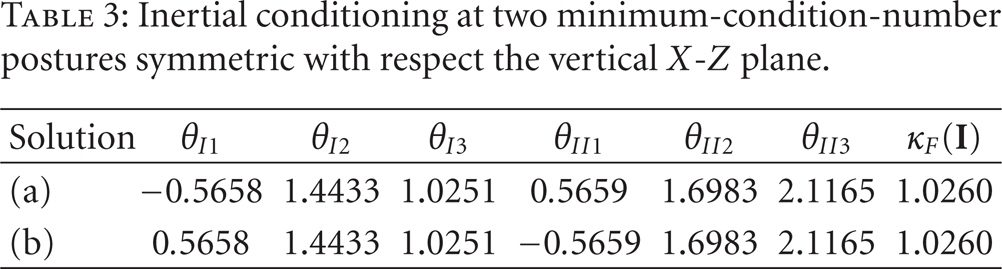
Inertial conditioning at two minimum-condition-number postures symmetric with respect the vertical X-Z plane.
Configuration (a) of the minimum condition number

The GIM at the minimum-condition-number posture is close to isotropic, namely,

Notice that matrix
5. Test-Cycle Trajectory
In this section we apply the concepts of kinetostatic and inertial conditioning to optimize the pose—position and orientation—of a test-cycle trajectory in the X-Z plane. The test-cycle trajectory is a particular trajectory commonly adopted by the industry to represent the standard pick-and-place task performed by a SCARA robot. In our case, the test-cycle trajectory lies in the medium vertical plane of the robot. The SMG should pick an object, release it, and return to the initial MP pose in a given cycle of duration T. Shown in Figure 6 is the trajectory, projected into the X-Z plane, as generated using a 4-5-6-7 polynomial displacement program, which is reproduced here for quick reference [12]:

where

Path generated using a 4-5-6-7 polynomial displacement program, displayed with different x and z scales.
Cartesian variables along the test-cycle trajectory.

5.1. Kinetostatic Conditioning along the Test-Cycle Trajectory
The kinetostatic index is used here to compare different locations, on the vertical plane of symmetry of the robot, of the same test-cycle trajectory. Hence, the kinetostatic conditioning index has been evaluated on the test-cycle trajectory (in solid line) and on two other trajectories shifted along the Z-axis by 0.05 m and 0.10 m, but lying in the same XZ-plane, as shown in Figure 8. We can notice that the condition number worsens when the test-cycle trajectory is translated closer to the base.
Condition number of the Jacobian
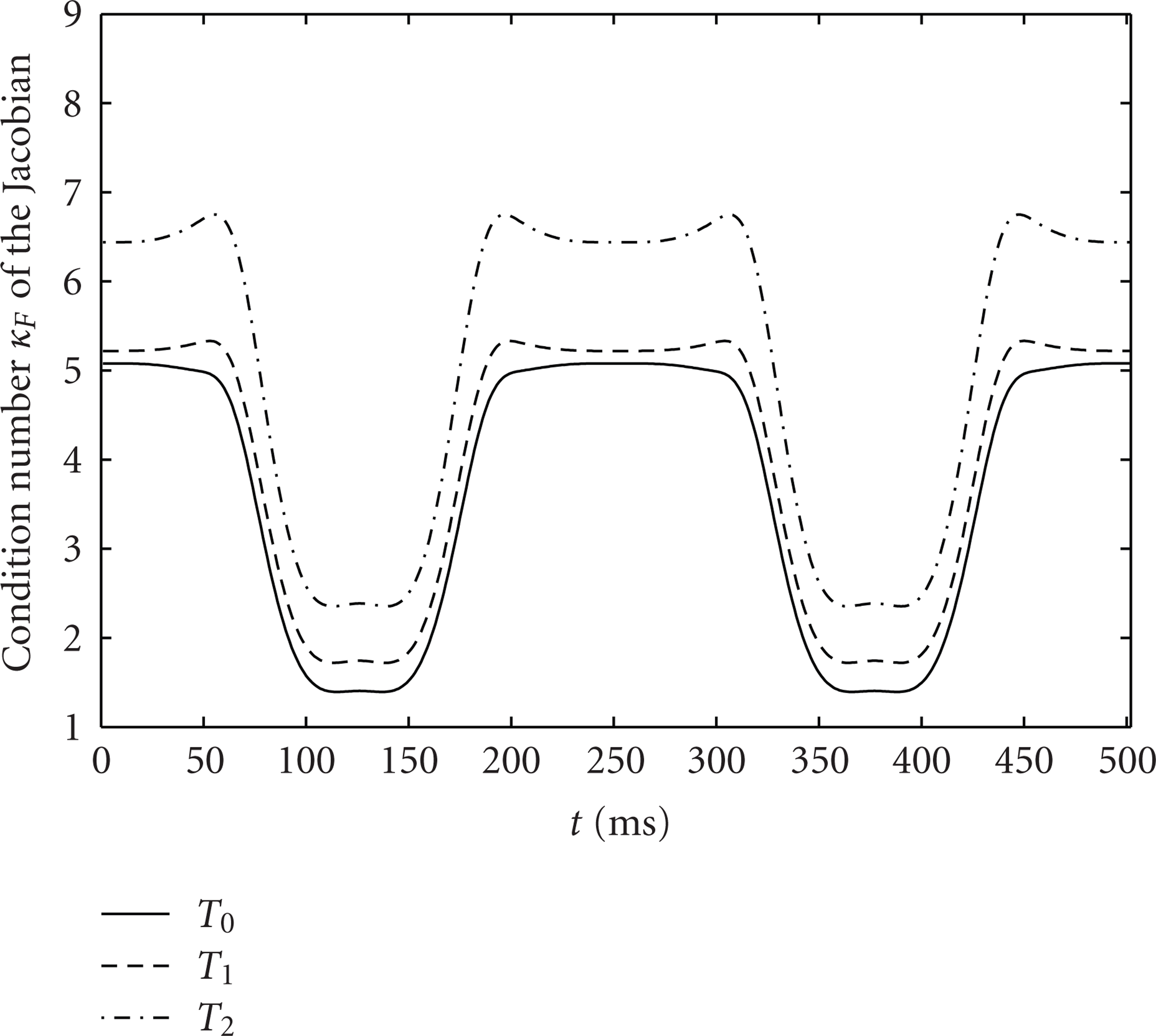
5.2. Inertial Conditioning along the Test-Cycle Trajectory
Figure 9 shows how κ
F
(

GIM condition number along three distinctly located trajectories lying in the X-Z plane: T0: the test-trajectory; T1: shifted 0.05 m, along Z, from T0; T2: shifted 0.10 m, along Z, from T0.
Finally, in Figure 10 we plot the condition number of

GIM condition-number distribution on a constant-y volume.
Summarizing results we can conclude that the kinetostatic and inertial conditioning indices seem to have similar trends, the latter being a stretched and scaled version of the former. Therefore, one might consider only one of the two optimization problems to observe the robot behaviour on a quality level. Sometimes, as in the case of the McGill SMG, it might be easier to work with the inertial conditioning index rather than with its kinetostatic counterpart, for the latter does not require a characteristic length as a further design-variable. On the contrary, the kinetostatic index is usually simpler to calculate than the inertial index, for the latter needs the complete dynamics model.
6. Conclusions
The kinematic and dynamic conditioning of the McGill SMG were studied. Firstly, a constrained optimization problem was set to find the robot characteristic length and the minimum condition number of the robot Jacobian. Then, a similar constrained optimization problem was set to find the optimum robot posture of minimum condition number of the generalized inertia matrix. The kinetostatic and inertial conditioning indices were evaluated on a particular trajectory, the test-cycle, to be tracked by the MP. The evaluation has revealed similar behaviors between kinetostatic and dynamic indices. Particularly, the inertial effects seem to amplify and distort the values of the kinetostatic index, thereby modifying both the scale and the maximum peaks. Finally, the inertial conditioning index was plotted over a constant-y volume to better understand the effects of a displacement of the test-cycle trajectory on the XZ-plane of symmetry of the robot.