
Abstract
This paper provides a method to determine the variable flexible joint parameters which are dependent on configurations for a PRS Parallel Robot. Based on the continuous force approach, virtual springs were used between the joint components to simulate the joint flexibility. The stiffness matrix of the joint virtual springs was derived. The method uses system dynamic characteristics in different configurations to set the virtual spring stiffness for all the joints in the system. Modal testing was conducted on a set of selected robot configurations to determine the system natural frequencies and mode shapes along with their variation. To obtain the virtual spring stiffness, the system was condensed at the joint nodal coordinates. Then eigen-sensitivity analysis was conducted on the condensed system matrices with respect to the stiffness parameters of the joint virtual springs. Thus, the virtual spring parameters in the model can be set to match the variation of the system dynamic responses with the robot configuration changes. The virtual spring parameters between the selected robot configurations were obtained by interpolation. The research indicates that the method is effective and relatively easy to conduct, compared to other methods. The variable flexible joint model is applicable to flexible multibody systems with variable configurations.
1. Introduction
Dynamic modeling of flexible multibody systems is a classical problem. The link flexibility and joint compliance (elasticity) of robots or mechanisms in general have been studied for a long time. This paper focuses on the difficult issue of joint flexibility which varies due to system configuration changes. Joint flexibility has been studied since the 1980s, mainly by relating it to contact/impact mechanics. Tzou et al. [1] proposed a stochastic approach to model the random feature of the dynamic contacts in the joints. Bowden and Dugundji [2] presented the linear and nonlinear analysis for the global dynamics of jointed structures. Moon and Li [3] conducted an experimental study on a pin-jointed truss. Tzou and Rong [4] provided a mathematical model for a three-dimensional spherical joint based on the contact force analysis. Kakizaki et al. [5] presented a dynamic modeling method for a SCARA manipulator with link flexibility and joint clearances. Seneviratne et al. [6] provided a combined massless-link and spring-damping model for modeling the joint clearance. Ravn et al. [7] presented the analysis of revolute joint clearances with and without lubricant. Schwab et al. [8] presented a study on the dynamic response of mechanisms affected by the joint clearance. Ting et al. [9] presented a novel and simple approach to identify the worst position and direction errors due to the joint clearance of a single loop linkage. Zhu and Ting [10] studied the uncertainty of planar and spatial robots with joint clearances. Wang et al. [11] presented the virtual spring method at joints to completely decouple the dynamic model of complex robotic systems with closed kinematic chains.
In the above investigations, two basic approaches were used in the dynamics of flexible joint systems. The first approach uses an impulse momentum model, where the pieced intervals are analyzed. The impulse momentum equations can be solved with the restitution condition for the jump discontinuity in the system velocities and the joint reaction forces. The second approach uses a continuous force model to represent the force of interaction between the impact surfaces. Stiffness and damping coefficients are set to account for the impact surface compliance and energy dissipation during the impact process. Obviously, the second approach is easier to handle than the first. No matter which method is used, a key step is to determine the parameters in the joint models. Though the above models are effective to different extents when used to represent the physics of an individual joint in a configuration-fixed system, they are difficult to use for multiple joints assembled together in a configuration-variable system (such as a robot). The difficulty is that the joint flexibility parameters may change when the system configuration changes. Also, the parameters may be different for the same type of joints at different locations in a system. It is the highlight for this paper to display how to set the flexibility parameters for multiple joints in a system with variable configuration.
Based on the continuous force model, this paper presents a modeling method on the joint whose flexibility results from the variable joint looseness due to the system configuration change. The flexible joint model was used in the simulation of a PRS parallel robot shown in Figure 1. Instead of studying the joint individually, the method uses system dynamic characteristics to set the flexibility parameters for all the joints in the system. Experimental modal testing was conducted at a set of selected robot configurations to determine the variation of the system natural frequencies and mode shapes. To easily obtain the joint flexibility parameters, the system was condensed at the joint coordinates. At each selected robot configuration, eigen-sensitivity analysis was conducted on the condensed system matrices with respect to the joint flexibility parameters. Thus, the joint flexibility parameters in the model can be updated at each selected robot configuration to be consistent with the variation of the system dynamic responses. The joint flexibility parameters between the selected configurations were obtained by interpolation.

The Parallel Robot Prototype.
2. Flexible Joint Model
Figure 2 shows the system model of a PRS parallel robot, where OXYZ is the global reference,

Parallel Robot System Model.
(a) Flexible Revolute Joint Model (axial-section view). (b) Flexible Revolute Joint Model (cross-section view).
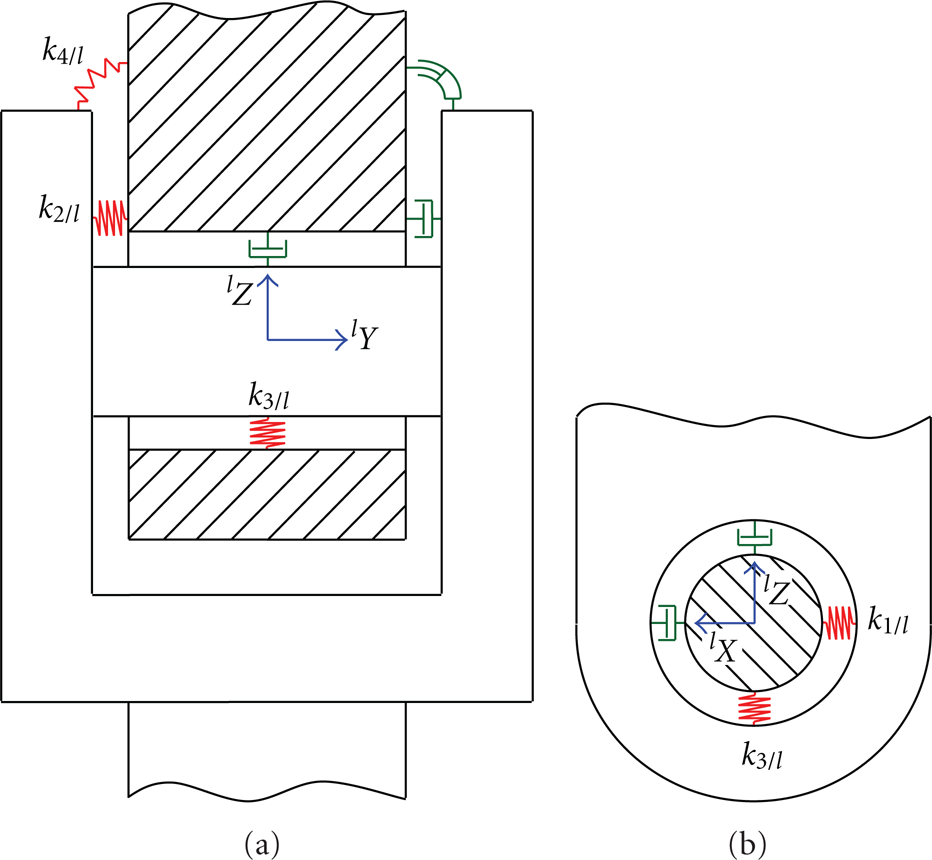
In this case it is recognized that the special revolute joint (not related to the leg body) is not a “general” revolute joint even for the flexible case, and so the symbol “R” in the phrase “PRS parallel robot” may not seem perfectly suitable. Rather than use a special symbol (such as R′), we have maintained the use of R in order to reduce unnecessary confusion. For simplicity, this research considers the joint virtual dampers with modal damping in the entire system; only the joint virtual springs are modeled here.
The potential energy of the joint virtual springs in the lth branch can be originally written as

where
in which

where

and

where 프 denotes
The joint coordinates

where the elements of matrix
By writing the system potential energy, the system stiffness matrix [

In (6), the joint stiffness parameters will be set variable to match the variation of the system dynamic responses at different configurations. Therefore, (5), (8), and (9) are variable matrices.
Using static condensation method given by Guyan [12], the condensed system stiffness matrix [


where [

The above [
3. Eigen-Sensitivity on the Condensed System
According to Fox and Kapoor [13], the natural frequency sensitivity and mode shape sensitivity with respect to joint stiffness parameter
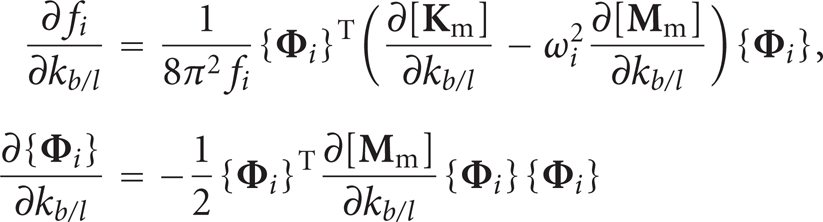

where fi is the ith natural frequency,
Therefore, the terms


In light of (8), the term

where

where ℭ denotes

4. Modal Testing and Simulation
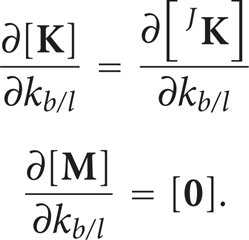
MATLAB codes were written based on the above analysis. The link model was built by using finite elements and was used to investigate the joint flexibility. For coordinate condensation, the selected master coordinates are the linear joint nodal coordinates in (4) in three branches (removing angular coordinate
Configuration Settings for the Simulations and Modal Testing.
Physical data for numerical calculations.

Modal testing was conducted at each selected robot configuration. In order to understand the entire robot prototype, all measurement points were chosen to be evenly distributed on the platform and three legs. The excitation points were chosen close to the spherical joints on the moving platform. Accelerometers were used to detect the responses in the local body reference directions at the measurement points of each leg and the platform. The excitation and response signals were amplified and then recorded using LabVIEW where the FRF of each measurement is generated. The sampling frequency was 2000 Hz and sampling time was 1 second. The window function was set as force-exponential with 50% force window and 10% exponential window. The FRF measurements were imported to the postprocessing software ME'scope which extracts the system natural frequencies and operating deflection shapes (ODSs) that are theoretically close to the mode shapes.
With eigen-sensitivity (13) and (14) at hand, the natural frequencies and mode shapes in the model can be modified at the selected robot configurations according to the modal testing results by adjusting the joint stiffness parameters as follows:

where {Δ
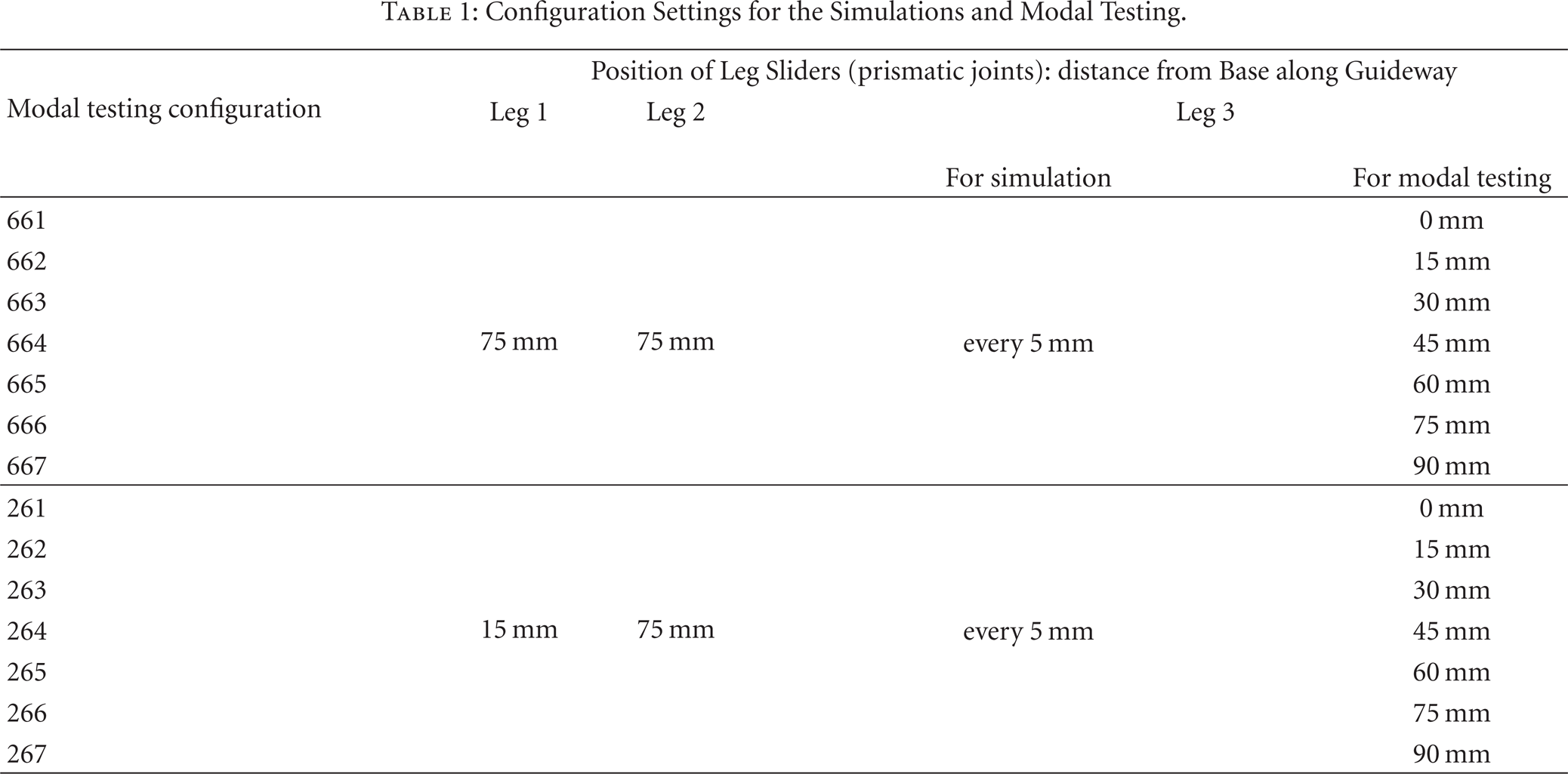
Figures 4(a), 4(b), and 4(c) show the stiffness parameters of the joint virtual springs for the robot configurations from 661 to 667, and Figures 5(a), 5(b), and 5(c) from 261 to 267 The initial joint stiffness parameters are uniformly set as 105 N/m (or N*m/rad for k4/l, l = 1, 2, 3) for all configurations. By using (21) for iteration, the joint stiffness parameters are obtained at the modal testing configurations 661 to 667 and 261 to 267, and linearly interpolated into the simulation configurations between these modal testing configurations. These figures indicate that the joint stiffness parameters are set configuration-dependent in order to match the variation of the system dynamic responses.
(a) Joint Stiffness in Branch 1 versus Configuration from 661 to 667. (b): Joint Stiffness in Branch 2 versus Configuration from 661 to 667. (c) Joint Stiffness in Branch 3 versus Configuration from 661 to 667.

(a) Joint Stiffness in Branch 1 versus Configuration from 261 to 267. (b) Joint Stiffness in Branch 2 versus Configuration from 261 to 267. (c) Joint Stiffness in Branch 3 versus Configuration from 261 to 267.
Figure 6 displays and compares the variations of the first 15 calculated and measured natural frequencies with the slider (prismatic joint) position changes starting at configuration 661 and ending at configuration 667 (referring to Table 1), and Figure 7 starting at configuration 261 and ending at configuration 267. The differences between the calculated and the measured frequencies are mostly less than 1%, and the largest deviations are less than 7% at the 5th and 6th natural frequencies at configurations 661 and 267. The possible reasons for the deviations are that the solutions of the joint stiffness parameters are locally optimal and that these two frequencies may be related with some slave coordinates.
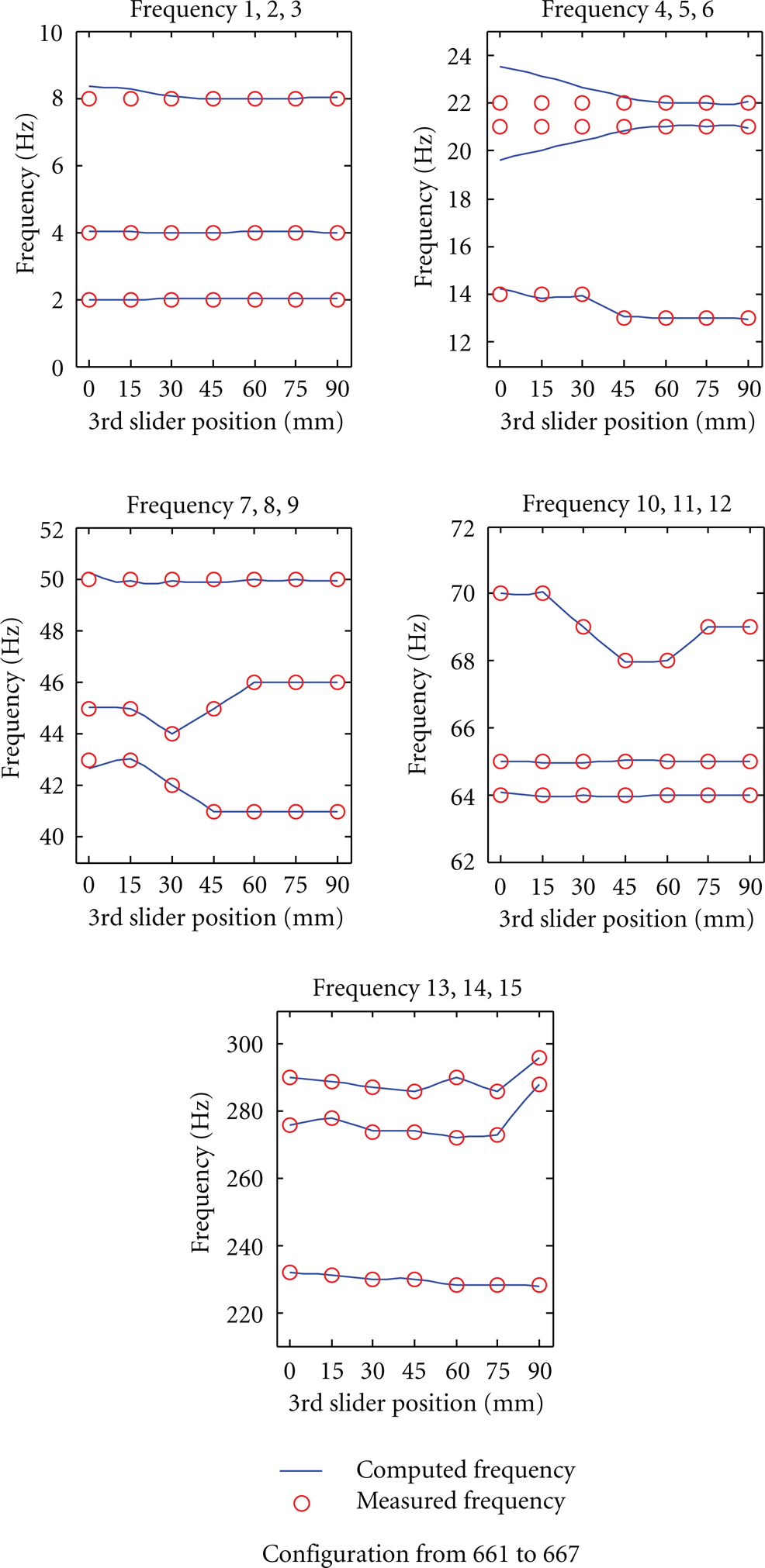
Natural Frequency versus Configuration from 661 to 667.

Natural Frequency versus Configuration from 261 to 267.
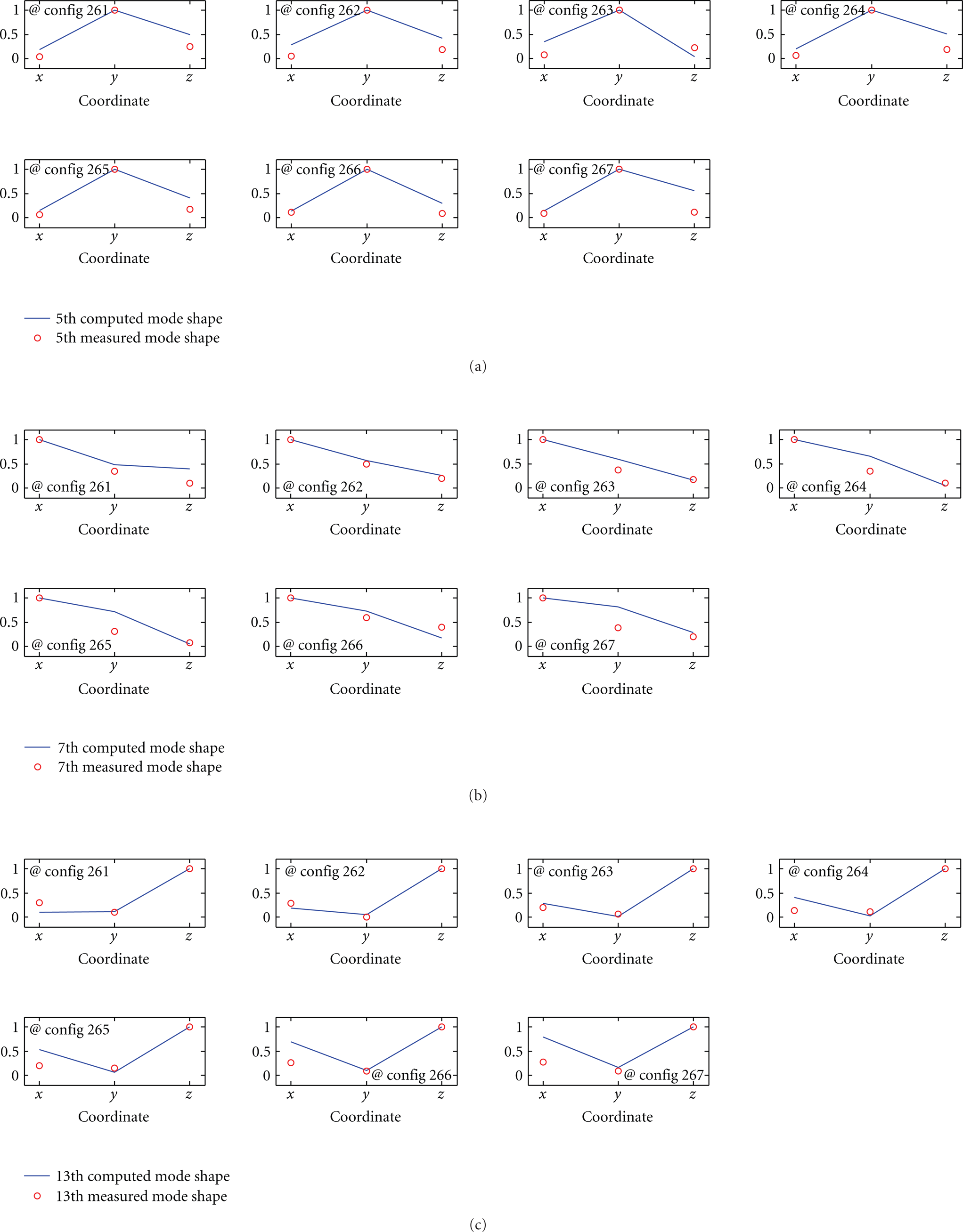
Figures 8(a), 8(b), and 8(c), respectively, display and compare the 5th, 7th, and 13th mode shapes at the node of the platform center (omitting mode shapes at other nodes) at configuration 661 to 667, and Figures 9(a), 9(b), and 9(c) at configuration 261 to 267 These mode shapes have the largest displacements at the platform center compared to other mode shapes: the 5th mode shape has the largest displacement in p Y direction, the 7th in p X direction, and the 13th in p Z direction. For easy comparison, the selected mode shape components are normalized. These figures show that the calculated mode shapes are close to the measured ones although they do not perfectly agree. The disagreement may result from the undamped joint model on which the joint stiffness parameters are calculated. For the simplicity of the method, however, it is worthy of the small loss of mode shape accuracy.
(a) 5th Mode Shape at Platform Center at Configuration 661 to 667. (b) 7th Mode Shape at Platform Center at Configuration 661 to 667. (c) 13th Mode Shape at Platform Center at Configuration 661 to 667.

(a) 5th Mode Shape at Platform Center at Configuration 261 to 267. (b) 7th Mode Shape at Platform Center at Configuration 261 to 267. (c) 13th Mode Shape at Platform Center at Configuration 261 to 267.
It must be indicated that, for the ideal rigid (tight) joint model of the same robot, natural frequencies and mode shapes will also be variable with the configuration changing (not shown here), but the natural frequencies are much higher than those of the flexible joint model. In simulation of the ideal joint model, the first natural frequency is about 200 Hz and the second is about 500 Hz. Therefore, Figures 6–9 display the flexible joint effect on the system due to configuration changes.
5. Conclusions
This study presents a configuration-dependant flexible joint model for a parallel robot. The method is based on adaptation of virtual springs between the joint components to simulate the joint flexibility. The joint stiffness matrix of virtual springs was derived. The system was condensed at the joint nodal coordinates. Eigen-sensitivity analysis was conducted on the condensed system matrix with respect to the stiffness parameters of the joint virtual springs. Dynamic modification was conducted at a series of robot configurations for the virtual spring parameters to be set variable to match the variation of the system natural frequencies and mode shapes obtained from modal testing. The virtual spring parameters between the selected robot configurations were obtained by interpolation. The research indicates that the presented method is effective and relatively easy to conduct, compared to other methods. The variable flexible joint model is applicable to flexible multibody systems with variable configurations.