
Abstract
The inherent challenges of robotic underwater exploration, such as hydrodynamic effects, the complexity of dynamic coupling, and the necessity for sensitive interaction with marine life, call for the adoption of soft robotic approaches in marine exploration. To address this, we present a novel prototype, ZodiAq, a soft underwater drone inspired by prokaryotic bacterial flagella. ZodiAq’s unique dodecahedral structure, equipped with 12 flagella-like arms, ensures design redundancy and compliance, ideal for navigating complex underwater terrains. The prototype features a central unit based on a Raspberry Pi, connected to a sensory system for inertial, depth, and vision detection, and an acoustic modem for communication. Combined with the implemented control law, it renders ZodiAq an intelligent system. This article details the design and fabrication process of ZodiAq, highlighting design choices and prototype capabilities. Based on the strain-based modeling of Cosserat rods, we have developed a digital twin of the prototype within a simulation toolbox to simplify analysis and control. To optimize its operation in dynamic aquatic conditions, a simplified model-based controller has been developed and implemented, facilitating intelligent and adaptive movement in the hydrodynamic environment. Extensive experimental demonstrations highlight the drone’s potential, showcasing its design redundancy, embodied intelligence, crawling gait, and practical applications in diverse underwater settings. This research contributes significantly to the field of underwater soft robotics, offering a promising new avenue for safe, efficient, and environmentally conscious underwater exploration.
Introduction
Our vast ocean, covering more than 70% of the Earth’s surface, is vital not only for marine ecosystems but also for the health of the planet and the well-being of billions of people. In this context, the development of unmanned underwater remotely operated vehicles (ROVs) is of immense significance. Rigid ROVs benefit from their well-developed high-speed rotary propulsion systems (typically >2000 RPM) and well-understood fluid interaction models, enabling fast and highly controllable motion. 1 Some designs feature a low turning radius and can translate in 3D, while some designs incorporate actuator redundancy for fault tolerance. 2 While various commercial solutions exist for tasks like environmental monitoring and resource mapping, 3 the close-up exploration of underwater life and navigating through cluttered seabeds or around submerged structures benefit from bio-inspired designs to avoid accidental damage to the fragile marine environment. 4 The high-frequency rotation of traditional motors close to the sea floor or marine life can cause self-damage and disturb marine life, making it harder to study underwater ecosystems.
Compared with their rigid counterparts, the compliant nature of soft robots allows for safer and less precision-demanding interactions. They are also bio-compatible and adaptable to unpredictable environments. Inspired by the efficient morphology and body structure of aquatic organisms, soft roboticists have proposed a range of bio-inspired designs for different swimming strategies.5–8 Lift-powered swimming, inspired by the techniques of animals such as manta rays 9 and turtles, 10 utilizes hydrodynamic lift forces generated by the movement of their fins or limbs. The undulation strategy, in contrast, relies on the body’s wave-like motion, effectively producing propulsion thrust through the cyclical storage and release of elastic energy. Robot designs in this category draw inspiration from the slender and streamlined bodies of creatures such as snakes 11 and eels, 12 making them ideal for navigating narrow environments. Various robotic designs adapt the swimming strategy of frogs and insects, which use oar-like limb movements to push water backward and generate forward thrust.4,13,14 Lastly, the jet propulsion strategy, used by animals like squids and octopi, propels them forward by expelling water, utilizing the conservation of momentum principle.15,16
Soft robot prototypes often lack actuator redundancy, the ability to translate in 3D, and a low turning radius. Additionally, most soft robot designs based on the aforementioned locomotion strategies require intricate mechanisms or the incorporation of smart materials, which contrasts with the simpler, conventional motor-based propellers used in rigid drones. Recently, a novel macroscale underwater locomotion strategy has been developed in a high Reynolds number regime, combining motor rotary actuation with an elongated passive soft filament acting as the rotor. 17 The strategy mimics the swimming gait of bacterial flagella, often regarded as the only example of a biological “wheel.” The transmitted torque and external fluid interaction on the soft body prompt the soft body to adopt a helical shape, effectively generating the propulsion thrust needed for movement.18,19 Unlike traditional (rigid) propellers that depend on high-frequency, low-torque rotation, these macroscale soft propellers utilize low-frequency, high-torque actuation, offering an equally powerful yet bio-inspired mode of locomotion that minimizes physical impact and potential harm to marine life, both flora and fauna. In a previous work, 20 we presented a comprehensive design, characterization, and modeling framework of flagellate underwater robots. The flagella were modeled using the strain-based modeling approach of Cosserat rods,21,22 while simplifying assumptions are used to model hydrodynamic forces.
Underwater drones used for close inspection of marine environments benefit from a compact turning radius and 3D maneuverability. Designing with redundancy is beneficial for fault-tolerant operation. Accounting for all these functionalities, we introduce a new design for a soft robot comprising 12 flagella modules arranged symmetrically across a dodecahedral shell. We named it “ZodiAq” to signify its characteristic shape with 12 actuators, with “Aq” indicating its aquatic nature. The design and fabrication details of the prototype are provided in Section “Design and Fabrication.”
To analyze locomotion and develop control laws, we created a digital twin of ZodiAq using SoRoSim, a MATLAB toolbox based on the geometric variable strain (GVS) model. 23 The methodology for constructing the digital twin and a dynamic simulation result is described in Section “Digital Twin of ZodiAq.” We have developed a simplified model-based control law and implemented it on the digital twin to control all 6 degrees of freedom (DoF) of the robot body, while for the prototype, control of depth and orientation is achieved (Section “Nonlinear Motion Control for Robot Navigation”). Using four experimental demonstrations (Section “Experimental Demonstrations”), we showcase the capabilities of ZodiAq and their real-world applications. Our first demonstration focuses on the design redundancy of ZodiAq, which ensures that the prototype remains functional even with the failure of an actuator module. In the second demonstration, we explored ZodiAq’s “embodied intelligence,” derived from its soft body’s physical form (compliance).24,25 The third demonstration showcases a supplementary locomotion gait of the prototype: crawling. Finally, the fourth demonstration highlights ZodiAq’s ability to navigate artificial coral, showcasing its suitability for marine close inspection tasks. The final section (Section “Discussions and Conclusions”) summarizes the results and outlines potential future developments.
Design and Fabrication
To achieve omnidirectional movement and rotation about the vertical axis, as well as to ensure design redundancy, we opted to equip the robot with 12 flagella modules. For geometrical symmetry, we chose a dodecahedron—the fourth Platonic solid—as the shell structure of the robot (Fig. 1A). Each pentagonal face of the robot houses a motor canister assembly to power the flagella, which are fabricated through a silicone molding process with a 3D-printed hook embedded at their base. For low-frequency, high-torque operation, we used a geared DC motor with a maximum rotational speed of 130 RPM and a rated torque of 78 Nmm. ZodiAq uses a Raspberry Pi as its central control unit. Its sensory system consists of a camera for vision, sensors including a temperature and humidity sensor for internal damage detection, an inertial measurement unit (IMU) for motion detection, a depth sensor for depth feedback, and an acoustic modem for underwater communication. The entire system is powered by lithium polymer (LiPo) batteries, which are mounted inside. Lastly, a ballast is mounted inside to shift the center of gravity below the center of buoyancy. All components of ZodiAq are methodically arranged to achieve neutral and stable buoyancy. A comprehensive list of all external and internal components of ZodiAq are listed in Table 1.

Prototype design:
Components of ZodiAq According to Figure 1A
Subassembly of DC motor: Model GA25-370, 130 RPM, 6 V, shaft coupler, shaft, shaft O-rings, and a PVC canister.
Adafruit DC motor HATs (motor drivers) ×3, IMU, temperature and humidity sensor, and PiCamera.
Buck converter (step-down transformer), relay switches, battery management system, voltage indicators, and electrical connections.
The schematic of the electrical connection is shown in Figure 1B. The charging and operation circuits are split into two: one for the Raspberry Pi and another for the motor drivers. The setup includes components for short-circuit protection, voltage balancing, and voltage conversion. The motors associated with the 12 flagella modules follow a numbering scheme mentioned in Figure 1C. Pairs of consecutive motors (1 and 2, 3 and 4, etc.) are arranged on opposite sides of the prototype. This particular arrangement ensures minimum load on the motor drivers and assists in simplifying the control law (details in Supplementary Data).
The fully assembled ZodiAq prototype, immersed underwater, is shown in Figure 1D. We tested the prototype’s functionality up to a depth of 2.5 m and an estimated operational duration of 1 h, constrained primarily by Raspberry Pi’s energy consumption. The neutral stability of the prototype is validated in an experiment illustrated in Figure 1D. In this test, a vertical force (fa) was applied, causing the prototype to descend and tilt. The force (fb) and the stabilizing moment (mb) due to buoyancy successfully repositioned the prototype, restoring its depth and orientation. Readers may refer to the video demonstration in Supplementary Movie S1. Table 2 lists the key specifications of the prototype. For detailed information on the design and fabrication, readers may refer to Supplementary Data.
Key Specifications of ZodiAq
Digital Twin of ZodiAq
To analyze the dynamics and formulate control laws, we created a digital twin of ZodiAq using the SoRoSim toolbox, 23 which employs the GVS approach. The GVS approach is based on the strain parameterization of the Cosserat rod: a 1D continuum mechanics object with axial torsion, bending in two directions, axial stretch, and shear in two directions. It is a Lagrangian mechanics framework based on screw theory, which effectively connects rigid and soft bodies to model hybrid soft-rigid robots using a minimal set of generalized coordinates. A summary of the GVS model and the implemented algorithm specific to the ZodiAq design is provided in Supplementary Data, while for a detailed understanding of the framework, the readers may refer to Refs.21,22,26
The toolbox defines links and their assemblies (linkages) as MATLAB class objects. Each link has a rigid joint and a soft or rigid body. The geometric and material properties of the link are defined during link creation. For the robot’s dodecahedral shell, we created a rigid link with a 6 DoF joint. Shafts are created as rigid links with revolute joints and assembled appropriately using a fixed transformation matrix gf (Fig. 2A) corresponding to each face of the shell. Connected to each shaft is a hook, a rigid link with a fixed joint and a precurvature, and to each hook, we connect a flagellum, a soft link with a fixed joint. We model the soft flagellum as an inextensible Kirchhoff rod, a sub-class of Cosserat rod with torsion and bending with linear strain parameterization (6 DoFs). The total number of links in the linkage (assembly) is 37 and the total DoFs of the system are 90. External forces due to gravity and fluid interaction, including buoyancy, drag, lift, and added mass are considered. Joints of the shafts are defined as angle-controlled actuators. The overview of the linkage creation in SoRoSim is shown in Figure 2B. For a comprehensive understanding, readers may refer to Supplementary Data.

For an illustrative simulation, we arbitrarily actuated motors M6, M8, M9, and M11, which are distributed predominantly on one side of the dodecahedral shell, at 60 RPM in the counterclockwise (CCW) direction (Fig. 2C). We noted that besides the intended straight-line motion toward the opposite side (−ve x-axis), there was an unintended drift of 0.74 m in the y-axis and a minor displacement of 0.03 m in the z-axis. Additionally, the robot experienced a significant orientation shift about the z-axis by 32.8°. Due to the dodecahedral design of ZodiAq, the commands for 3D translation or rotation are not straightforward motor commands. The deployment of controllers, which will be discussed in the subsequent section, aids in sustaining precise orientation and trajectory during movement. The dynamic simulation is available in Supplementary Movie S2. Readers can also simulate the digital twin in MATLAB through the GitHub link provided in Ref. 27
Nonlinear Motion Control for Robot Navigation
The dynamic modeling of our robot is highly complex, primarily due to the interaction between the soft parts with the fluid. With a total of 90 DoFs and 12 inputs, the dynamics of the robot presents substantial challenges for model-based control design. We propose a simplified model that solely accounts for the robot’s shell. The collective throttle input is determined by aggregating the forces and moments generated by each flagellum positioned at the center of each face. The proposed model allows for the development of a nonlinear model-based controller for robot navigation. The control law demonstrates tracking performance in the system’s 3D position and vertical orientation (ψ) while the other angles stabilize to neutral equilibrium, highlighting control over the 6 DoFs in simulations. The developed control law has been employed in the digital twin, demonstrating the effectiveness of the simplified model for control design. However, due to the absence of a tracking system in our experimental setup, planar coordinates (x and y) feedback is unavailable. Consequently, we have a semi-closed-loop control in the prototype with depth (z) and orientation (ψ) feedback obtained from the depth sensor and IMU, while the planar movement (x and y) was controlled in an open-loop manner by commanding a desired acceleration. This adjustment in the control law enables the execution of various trajectories with the prototype, including straight-line movements, square paths, and rotational maneuvers, as we demonstrate later on. The simplified model and control law details are provided in Supplementary Data.
Closed-loop control simulation
The effectiveness of the proposed control method is tested using the digital twin, which simulates the whole dynamics of the system. The proposed control law predefined the rotation direction of each flagellum, considering that the direction of the rotation does not impact the direction of the thrust. Moreover, it combines the two motors of opposite faces to create a new input, making the system differentially flat. We conduct closed-loop control simulations where the system executes a planar semicircular trajectory with a radius of 2 m over 60 s while also controlling the orientation of the vertical axis ψ and the depth z of the system. Moreover, we can see that the Euler angles ϕ and remain stable around the equilibrium point without the need to control those variables directly θ in the closed loop. The simulation results, together with the developed control scheme, are shown in Figure 3. Readers may watch Supplementary Movie S3 to view the dynamic simulation results.

Simulated results of the closed-loop system:
Depth and orientation control
The submerged prototype’s depth and orientation were intentionally altered by applying external forces and moments. We analyze the control system’s ability to respond to these disturbances, restoring the prototype to its preset depth and orientation.
Figure 4A and B shows the simulation study of depth control and results from the experiment. The drone is forced downwards. Subsequently, using the depth feedback, the control system actively minimizes the depth error and returns the drone to its initial depth. Notably, the buoyancy force also plays a role in facilitating this correction. Figure 4C and D illustrates the orientation control. After a forced clockwise rotation, the control system corrects the induced orientation error, realigning to the initial orientation. In the simulations, these disturbances are modeled as step signal forces/torques lasting for 1 s. Readers can access Supplementary Movie S4 to see a qualitative comparison of simulation and experiments, including clockwise (CW) and CCW rotations, as well as vertical shifts downwards and upwards. Figure 4E shows the orientation and depth errors in simulation (Δψs and Δzs) and experiments (Δψ and Δz), while Figures 4F and G illustrate the controlled rotational velocities (ω/ωmax, ωmax = 130 RPM) of all 12 motors. The small discrepancies in simulation and experiments arise primarily from the challenge of accurately simulating the external disturbances on the real robot. However, the qualitative similarities between the simulations and the real-world experiments remain evident. To avoid overloading motor drivers, the velocities have been capped at 0.8ωmax for all experiments. Hence, throughout all the experiments, the robot operates in low-speed mode (<2 RPS). The experiment also demonstrates the ability of ZodiAq to rotate with a near-zero turning radius, highlighting its maneuverability in confined spaces.

Validation of depth and orientation control. The sequence of video snapshots illustrates the active depth control by controlling the motors using depth feedback in simulation
Square trajectory
The second experiment aimed to navigate a square trajectory. Due to the absence of planar coordinate feedback in our experimental setup, this method involved maintaining initial orientation and depth while the planar motion was regulated by commanding desired accelerations. The procedure entailed commanding a positive acceleration in the x-direction and then a positive acceleration in the y-direction. This was followed by commanding a negative acceleration in the x-direction and, finally, a negative acceleration in the y-direction, with each step lasting for 40 s.
To validate the control strategy in a semi-closed loop, we simulated the robot’s dynamics. Figure 5A presents the digital twin’s trajectory, while the experimental results of the prototype are shown in Figure 5C. Supplementary Movie S5 provides both the simulation and experimental video results. A qualitative comparison of the two results and controlled motor speeds (Fig. 5B and D) demonstrates that the simulation and experimental results are in good agreement. The prototype successfully follows the square trajectory, except on the fourth side, where a notable deviation is observed. This deviation can be attributed to imperfections in the prototype and the absence of planar coordinates feedback. The maximum error in the depth is 5 cm (Fig. 5E), while the maximum orientation error is 23° (Fig. 5F).

Square trajectory using semi-closed-loop control:
Experimental Demonstrations
To demonstrate the prototype’s functionalities, we delve into demonstrations of design redundancy, embodied intelligence, crawling gait, and its application in close exploration of marine environments. Readers may refer to Supplementary Movies S6, S7, S8, S9 for video results of these demonstrations.
Prototype redundancy
A robot’s redundancy is defined by its ability to continue operation despite losing functionality in some parts, such as a damaged actuator or a defective motor. This important feature enhances the adaptability and reliability of the robots that operate in unpredictable underwater environments. 28 The ZodiAq is equipped with 12 actuators specifically to ensure operational redundancy. When an actuator becomes damaged, the robot should redistribute the affected operation among other actuators, significantly lowering the risk of critical failures. To test the redundancy of ZodiAq, we conducted the following experiments (Fig. 6).

Assessing design redundancy:
In the first experiment, ZodiAq was set to move in a straight line in the positive x-direction (acceleration command) with all flagella intact (full system). In the second experiment, we removed one of the actuators (M5), thereby creating an impaired system. As illustrated in Figure 6A, the full system covered a distance of two body lengths every 15 s. The impaired system also maintained a straight-line trajectory as depicted in Figure 6B. However, its speed was reduced to one body length every 15 s, nearly half the velocity achieved by the full system. It’s important to note that the initial orientation and depth were established at the time of ZodiAq’s placement, resulting in a different x-axis direction for each experiment. The variations in motor speed for both cases can be inferred from the plot of controlled motor speed. Figure 6C and D shows that, despite the impairment, the robot maintained its depth (z) and orientation (ψ) close to the desired values.
Embodied intelligence
In recent times, compliant structures that are capable of using the environment to their advantage rather than avoiding them are getting attention from the soft robotics community.24,25 This is in response to the need for robot platforms that can safely interact in complex and dynamic surroundings, especially through embodied cognition. 29 Here, we demonstrate ZodiAq’s ability to navigate through an artificially created environment. The envisaged scenario is depicted in Figure 7A, where the robot is commanded to follow a simple translation along the x-axis. Along the trajectory, an inclined obstruction is placed. The experiment aims to observe the strategy employed by this robot to intentionally interact and utilize the obstacle for its navigation. This approach contrasts with the traditional strategy of rigid robots, which sense the environment and use advanced control algorithms to circumvent obstacles. 30 While rigid drones with multiple redundant rotors require active sensing and protective shields to avoid damage from collisions, ZodiAq leverages its inherent embodied intelligence to address the same problem.
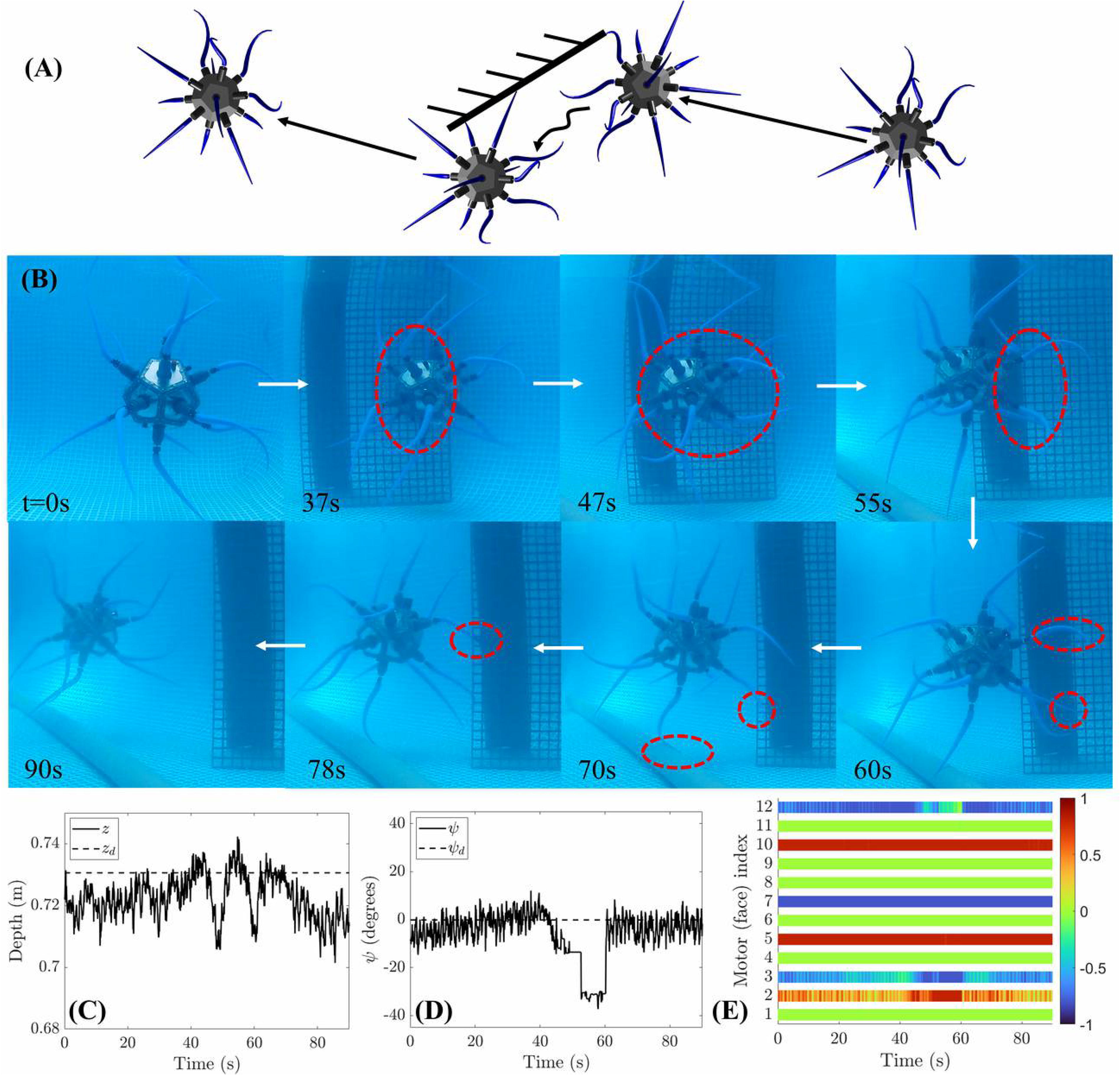
Demonstration of soft interaction and adaptive trajectory of the ZodiAq as it follows a straight-line motion:
Figure 7B shows the result of the experimental demonstration. The ZodiAq meets the rigid barrier at the 37-s mark. The robot’s arm flexibility enables a safe and advantageous interaction, guiding movement along the barrier. Postbarrier, the ZodiAq resumes its intended path. Notably, at 70 s, the flagella press against a cylindrical block, and at 78 s, against the wall’s far edge, utilizing these interactions for forward thrust. Figure 7C–E demonstrates the semi-closed-loop controller action.
Crawling gait
In previous demonstrations, the locomotion of ZodiAq is achieved through the thrust generated by the flagella interacting with the surrounding fluid. Another form of underwater locomotion is crawling. Crawling using appendages refers to a mode of locomotion where a robot moves using its limbs to push the body forward.31–33 Even though the prototype is not designed for crawling, we made it heavy enough to sink to the floor by increasing the ballast mass. Inspired by the movement of sea turtles, we implemented a manual open-loop actuation strategy (Fig. 8A). To propel forward, the left bottom arms (M6 and M8) were rotated CCW, while the right side arms (M10 and M12) were rotated CW. All other actuators were kept passive.

Demonstration of ZodiAq’s crawling gait:
Figure 8B demonstrates the crawling gait of ZodiAq. The arms perform a sweeping action, which produces a fluid thrust and additional reaction thrust from contact, that pushes the body forward. Additionally, the direction of the motion of the robot is altered by the cylindrical obstacle. We note that the locomotion cannot be classified as pure crawling, as it is also augmented by thrust from fluid interactions. The crawling locomotion on unpredictable terrain demands the adaptability of actuators—a capability that rigid robots cannot provide. 34
Marine exploration
Our final demonstration focuses on the application of the prototype for close inspection of a marine environment like that of a coral reef (Fig. 9). This scenario establishes a rocky underwater environment simulating a coral reef. As ZodiAq hovers above the target location, a descent command is sent using the acoustic modem. Upon receiving the command, the robot descends and contacts the coral. Despite this contact, it attempts to continue its downward motion. Subsequently, a command is sent to rotate the prototype to scan the environment. A rigid drone would require precise collision monitoring to avoid contact and rely solely on fluid thrust for locomotion. In contrast, the bionic design of ZodiAq reduces the need for active sensing and control and can utilize the additional thrust from the environment for the rotation. Even when in contact with a surface, the robot can reorient itself with a small turning radius.

Coral reef exploration with ZodiAq
Figure 9B shows the snapshots taken from the video footage recorded by the onboard camera. In the current prototype, a low-resolution PiCamera module is internally mounted behind a transparent face on one of the top faces. The quality of the footage is also affected by underwater low lighting conditions. This can be enhanced by integrating higher-quality external cameras or floodlights onto the prototype.
Discussions and Conclusions
The article introduces the design, simulation, and control of a novel soft underwater drone. The prototype demonstrated translation along all three axes (motion in the xy-plane in Section “Square Trajectory” and in z direction in Section “Marine Exploration”) and rotation about its vertical axis with an extremely small turning radius (Sections “Depth and Orientation Control” and “Marine Exploration”), which is advantageous for close inspection tasks. It has shown resilience in operating despite actuator impairments and has engaged in safe interactions with its surroundings, which are beneficial traits in unpredictable marine environments. The prototype demonstrates the ability to use the environment to supplement its motion with minimal control requirements, showcasing the design’s embodied intelligence.
Although the prototype features a range of innovative capabilities, there is scope for improvement in some aspects. The prototype’s redundancy is also intended for the multi-functionality of flagella in future designs. It allows strategic actuation of some flagellas for locomotion, while others can be used for manipulation and sensing. The risk of rotor entanglement in marine environments is reduced due to the compliance of the flagella and the low speed of motor rotation. In addition, a fail-safe mechanical release system could be implemented in flagella hooks, allowing ZodiAq to utilize its redundancy to drive to a safe zone during severe entanglement. Hence, while redundant actuators introduce additional drag, inertia, and manufacturing costs, enhanced functionality and safety prospects justify their integration into the prototype.
The control law can be modified to account for the design imperfections of the prototype, which lead to deviations in Figure 5C. Another obvious source of the deviation is the absence of feedback from planar coordinates in the experimental setup. Two or more acoustic modems can be implemented to triangulate the robot and provide planar coordinates feedback for fully closed-loop control. The triangulation technique can also be extended to geolocate images and data collected by the robot, enhancing ZodiAq’s capabilities for environmental monitoring. Additionally, stereo cameras, light detection and ranging, or depth cameras compatible with the Raspberry Pi can capture dimensional information. Multiple units of these devices and floodlights, all powered by the existing battery system, can be mounted externally to enhance image sharpness, data accuracy, and underwater visibility. The mounting process can follow the same approach used for the current design’s external units.
With these improvements, this prototype holds promise for real-world applications, signaling a significant step forward in the field of soft robotics for underwater exploration. The potential for these technologies to contribute to safe, efficient, and environmentally conscious exploration is immense, and we believe that our work lays a significant step toward realizing this potential.
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Authors’ Contributions
A.T.M.: Led the research project and contributed to writing—original draft, simulations, methodology, conceptualization, validation, investigation, data curation, formal analysis, visualization, experiments, and prototyping. D.F.-T.: Contributed to writing—original draft, simulations, methodology, validation, experiments, and controller implementation. Y.A.A.: Assisted with data curation, prototyping, investigation, and experiments. I.B.H.: Contributed to modeling, simulation, formal analysis, and writing—original draft. C.A.: Contributed to planning, methodology, conceptualization, review & editing. C.S.: Provided expertise in prototyping, planning, conceptualization, methodology, and supervision. L.S.: Contributed to writing—review & editing, and supervision. F.R.: Contributed to writing—review & editing, conceptualization, supervision, project administration, and funding acquisition.
Funding Information
The work was supported by the US Office of Naval Research Global under Grant N62909-21-1-2033 and in part by the Khalifa University of Science and Technology under Grants CIRA-2020-074 and RC1-2018-KUCARS-8474000136.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.