
Abstract
A new generation of soft functional materials and actuator designs has ushered the development of highly advanced soft grippers as adaptive alternatives to traditional rigid end-effectors for grasping and manipulation applications. While being advantageous over their rigid counterparts, soft gripper capabilities such as contact effort are mostly a consequence of the gripper workspace, which in turn is largely constrained by the gripper design. Moreover, soft grippers designed for highly specific grasping tasks such as scooping grains or wide payloads are usually limited in grasping other payload types or in their manipulation versatility. This article describes a reconfigurable workspace soft (RWS) gripper that exploits compliant structures and pneumatic actuators to reconfigure its workspace to suit a wide range of grasping tasks. To achieve desired kinematics, finite element analysis (FEA) studies are conducted to dictate actuator design and materials used. Various grasping modes and their reconfiguration of the gripper workspace are presented and characterized, including the gripper's capability to reliably scoop granular items with radii as small as 1.5 mm, precisely pick items as thin as 300 μm from flat surfaces, as well as grasp large convex, nonconvex, and deformable items as heavy as 1.4 kg. The RWS gripper can modify and increase its grasping workspace volume by 397%, enabling the widest range of grasping capabilities to date achieved by a single soft gripper.
Introduction
Consumer goods, logistics, and food industries stand to benefit greatly from robotic automation to meet their increasing and highly dynamic demands. In such industrial environments, reliable robotic handling of goods depends heavily on the development of versatile grippers with comprehensive and adaptive capabilities. Compared to traditional rigid grippers, state-of-the-art soft grippers use compliant soft actuators1–5 and functional hyperelastic materials,6–9 allowing them to grasp a wider range of geometries safely and reliably. In addition, soft gripper's high degrees of freedom and compliance enable several grasp modes despite underactuation10–12 and oversimplified control strategies,13–15 making them ideal for goods handling in such industries.16,17
Despite the advances made by soft grippers, their grasping capabilities are still constrained by their grasping workspace volumes and their ability to change these workspaces for different tasks. Several studies have used gripper workspace as an indicator of grasping performance (i.e., payload size, grasp types, and so on) and capabilities (i.e., in-hand manipulation, payload reorientation, and so on) of robotic grippers.12,18–21 Traditionally, workspace is defined as the range of positions a robot can reach to interact with its physical environment. Thus, a robotic manipulator's workspace consists only of all possible positions of the tip of the robot, or “end-effector.” On the contrary, soft grippers, such as human hands, can interact with payloads at all points within the volume swept due to their actuator deformations. All passive and active deformations possible for the soft gripper actuators contribute to the workspace. This swept volume or workspace volume has a strong correlation with the payload size range and grasping versatility of the gripper.
For instance, anthropomorphic soft grippers attempt to mimic the impressive capabilities of human hands. 22 However, grasping workspaces due to discrete finger-like actuators make these grippers incapable of grasping batches of items that are individually much smaller than the actuator size, such as small grains or beads. In addition, their bulky designs and complex underactuated kinematics make precision grasping of thin low surface area items (cotton gauze strips, needles, etc.) difficult. Several researchers have developed soft grippers with reconfigurable finger poses,12,23 fingertips,24,25 apertures, 26 and finger lengths27,28 to control the workspace and accommodate payloads of varying sizes and geometries. However, the mechanisms involved often rely on rigid parts such as motors and linear actuators, making such grippers heavy and bulky. In contrast, closed-cavity soft grippers21,29–33 could potentially exhibit a closed shell-like workspace, potentially scooping granular items but do not have the ideal nonobtrusive workspace required for high-aspect ratio items wider than the gripper aperture.
In general, robots based on single actuators or actuation approaches are often limited in their workspace volumes and, hence, their functionalities. Recently, several robotic design studies have been done to introduce multiple actuators to overcome these limitations, add functionalities, and improve performance across multiple domains. Kim et al. 34 integrated thrusters, commonly seen on aerial robots and multijointed legs, typical of bipedal robots, to develop a robot that is capable of complex aerial and terrestrial maneuvers. Similarly, to overcome the locomotive and functional limitations seen in traditional robots, several hybrid multiactuator robots have shown better functionalities and performance across multiple domains.35–37 Soft robots too have been shown to use multiple actuators and features to improve their performance over several tasks which were not possible before using single actuator-based designs. Joyee et al. 38 developed a 3D printed soft robot, which combined macro to micro design features to impart locomotive and manipulative functions to a single robot not seen before.
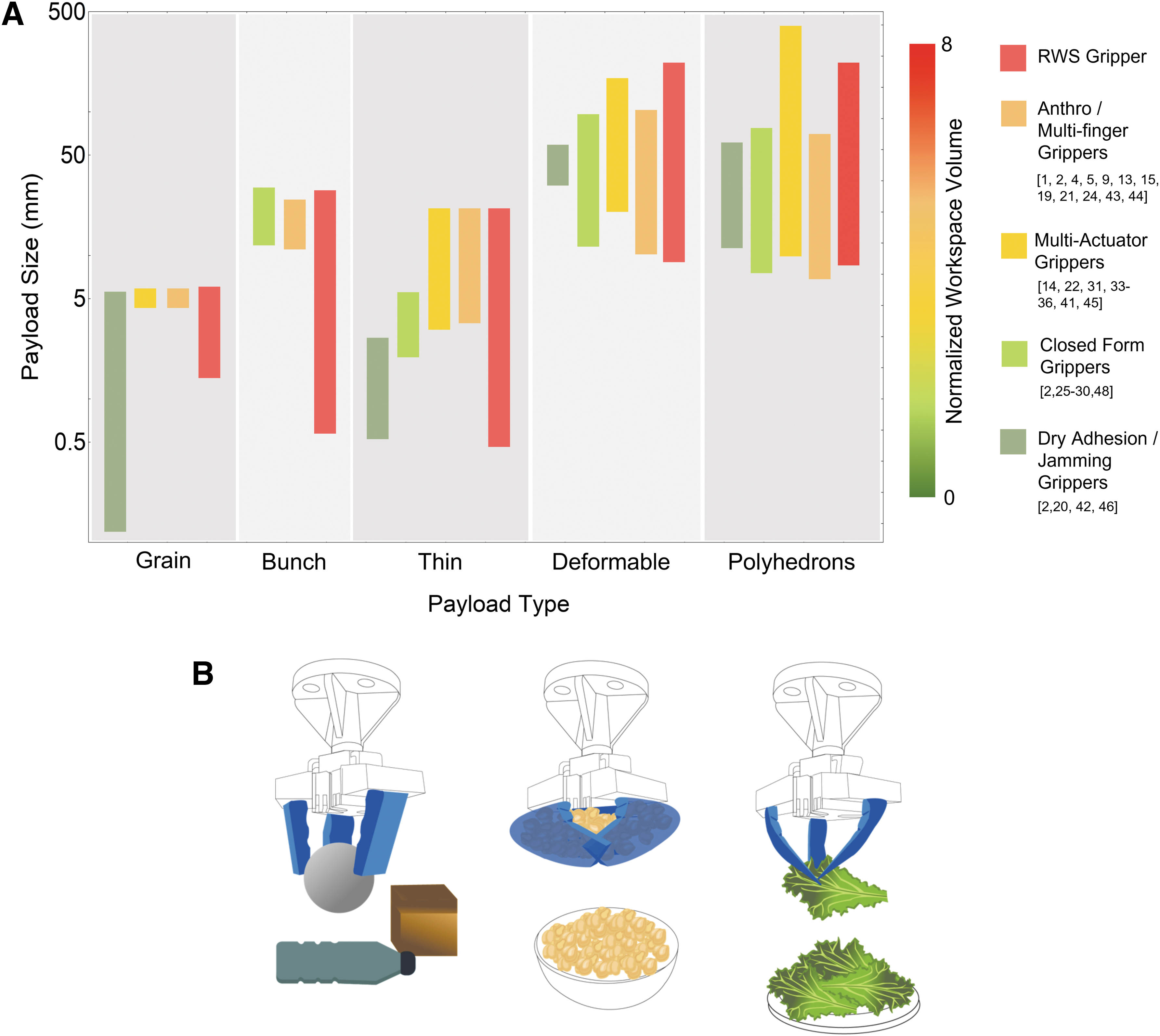
Similarly, grippers made of a single type of actuators are often not sufficient for highly dynamic industrial environments.39,40 Figure 1A shows the grasping performance of state-of-the-art soft grippers by comparing the normalized workspace volume (the ratio of the gripper workspace volume as defined above to total gripper volume) and the range of graspable payload size across different payload types such as granular, deformable, etc. As seen from Figure 1A, most single actuator type grippers (anthropomorphic, closed-form, stiffening, adhesion type grippers) tend to perform well in one or two payload categories only.
Gripper workspace and grasping capability:
To overcome these limitations, several groups have developed multimodal soft grippers by integrating multiple actuators or actuator morphologies, each designated for a specific grasping task.12,21,41–44 Each actuator provides a unique workspace configuration and contact area suited for a particular grasping task or a payload type. However, in these designs, the actuators are assembled using a rigid chassis or elements, making the grippers bulky and heavy, with low compliances or softness. They also often require manual interventions resulting in slower reconfiguration times, making them nonideal for autonomous multistep tasks in which each task requires a unique gripper modality. In addition, none of these grippers can perform tasks such as scooping or pinch grasping of thin items.
Using multimodal actuation, the grasping workspace of a soft gripper can be changed rapidly for payloads with different contact area requirements. In this study, a reconfigurable workspace soft gripper (or RWS gripper) capable of multiple grasping modes is presented. Figure 1B introduces a concept drawing of an ideal RWS gripper that can change its workspace volume through actuator shape morphing to have versatile grasping capabilities. While the ideal RWS gripper is capable of uninhibited shape morphing, grasping workspace reconfigurations, and universal grasping, the gripper presented in this study stands as the first step toward developing the ideal RWS gripper. It is capable of quickly reconfiguring its workspace volume using independently controlled actuators, namely: bending fingers, passively retractable nails, bidirectional foldable petals, and a flexible palm to suit the grasping task at hand. To achieve the desired morphing kinematics, finite element analysis (FEA) of the gripper's features is used to validate actuator designs and material choices.
The actuator kinematics and grasping modes are also characterized systematically through experiments. The gripper's capabilities and reliability while performing complex tasks such as scooping small grains or lifting thin items from flat surfaces are demonstrated using a robotic manipulator. The RWS gripper seamlessly combines complementary features and uses the interplay of two or more actuators to exhibit high workspace reconfiguration and multiple grasping modes. It can perform challenging tasks involving several grasping modes and payload types (Fig. 1A), which were previously not possible with a single soft gripper.
Reconfigurable Workspace Soft Gripper Design
The RWS gripper (Fig. 2A) consists of three pneumatic bending actuators mounted on a soft palm. While some of our previous gripper designs 19 could grasp a considerable range of geometries, the fixed shape of the fingers allowed grasping only of items with dimensions larger than the gripper fingers. This limitation is shared by most anthropomorphic soft grippers.3–5,11,22,45,46 The new actuators developed in this study address these limitations by actively morphing their shapes and adapting their contact surfaces to suit a wider range of geometries and grasping tasks. In addition, the new actuators use internal structures with elliptical voids (Fig. 2B) to increase bending curvature compared to our previous designs. The morphing capabilities of these actuators can be attributed to three novel design features: (1) passively retractable nails, (2) bidirectional folding petals, and (3) a flexible palm.

RWS gripper design:
Enhanced adhesion or controlled stiffening6,9,24,45,47 are effective techniques for precision grasping of thin payloads, but they rely heavily on the available contact area at the payload. Alternatively, fingers with actively controlled fingertips can modify the contact area of the gripper to better suit small and thin payloads. As shown in a previous study, 25 pneumatically controlled retractable finger nails can enable grasping of items with low surface areas such as thin wires, threads, or needles. However, these active nails require additional pneumatic inputs. In addition, active nails studied in Jain et al. 25 could not be partially actuated and behaved like fixed nails when fully extended under positive pressure. This results in the nail tip changing in height as the finger bends, requiring precise position control to allow for sufficient nail tip contact with small payloads.
Instead, a new compliant retractable fingernail capable of passively adjusting its length (Fig. 2B) can greatly simplify manipulation. A telescopic channel houses a fingernail, which in turn is connected to a highly compressible open cell foam. The nails are by default fully extended; however, they can retract when they are pressed against a rigid surface and return to their default state once moved away from the surface, due to the foam's elasticity. As shown by experiments, contrary to actively controlled or fixed nails, passively retractable nails presented in this study allow for robust grasping without the need for precise fingertip control or multiple actuation inputs.
Fixed geometries of finger-like48,49 and closed-form actuators21,29–31 prevent the scooping of granular materials and bunched payloads. Instead, the bidirectional actuators shown in Figure 2C allow the fingers to morph from distinct digits to wide petals. A pneumatic network of bellow actuators is used to control the curvature of the petal surface. When vacuum is applied to the bellows, they collapse causing the petals to fold behind the fingers, which can then bend as distinct digits under vacuum for power grasps. Under positive pressure, the bellows inflate and the petals fold toward the gripper center, forming a closed volume on finger actuation. This closed volume is suitable for picking multiple items in a single grasp or for scooping granular items.
A gripper's aperture heavily influences the range of payload sizes it can reliably grasp. Traditionally, bidirectional control of soft gripper apertures has been achieved through rotation of the fingers or bidirectional finger actuation.26,44,46,50 These techniques rely on either complex mechanisms with rigid linkages or fingers with multiple actuation inputs. In this study, aperture control is achieved by a novel multimaterial soft palm design (Fig. 2D). The soft palm consists of a trefoil-shaped hollow chamber with a relatively stiff core, thin inflatable bellows on the top surface, and inextensible finger adapters on the sides. The stiff core and soft bellows result in nonuniform inflation and deflation of the palm under positive and negative pressures, respectively, causing the rotation of the attached fingers (mounted on the finger adapters) and regulation of the gripper aperture. The finger adapters are supported using relatively stiff L-shaped hinges (Fig. 2D(ii)), which also add stiffness to the palm.
Finite Element Analysis
Finite element analysis (FEA) was performed to guide the actuator design and material composition to achieve the desired kinematics and workspace reconfigurability. The vacuum-actuated fingers are inspired from a previous finger design. 19 However, in this study, the geometry of the finger's internal structure is changed such that the actuator has elliptical voids, compared to the previous triangular voids. FEA studies show that the new actuator, Finger A, bends further and achieves a smaller radius of curvature (20.82 mm) compared to the previous actuator, Finger B (32.54 mm), at a pressure of −80 kPa (Fig. 3A, B). This can be attributed to the 44.34% larger actuator cavity volume and lower bending stiffness of the new internal geometry.

FEA of finger and petals:
To uncover any effects of petal actuation on finger bending, simulations of the finger bending without petals, with static petals, and with actuated petals were performed. The FEA studies (Fig. 3C) showed that the presence of a petal reduces finger bending (52% increase in radius of curvature), and the petal actuation further reduces finger bending (70% increase in radius of curvature). While the petals have a significant impact on the finger bending, the petal actuation only causes a further 18% reduction in finger bending and is deemed insignificant considering their added capabilities.
Two key configurations are desirable for the bidirectional petal actuators (Fig. 3E): (1) when petals are under negative pressure, they should fold onto themselves and “tuck” completely behind the fingers for the finger's unobstructed access to payloads during power grasping, (2) when petals are actuated using positive pressure, they should form a closed volume under finger actuation for secure grasping of small granular items. The kinematics of a single petal actuator were uncovered through simulations, and petal curvatures under different actuation pressures can be seen in Figure 3F where it can be seen that the petals fold substantially behind the fingers, as desired.
Extensive FEA studies of three finger-petal assemblies were performed to explore the scooping kinematics and select a petal shape with the highest effective scooping volume. Four candidate petal shapes (A–D) were chosen for the studies. First, starting with the assumption that the gripper scoop has a hemispherical geometry, the shape of petal A was formed by dividing a hemispherical shell into three parts and projecting each part onto an orthogonal plane. The simulated scoop volume for petal A was found to have several gaps between the three petals (Fig. 3G). Extra material was added to the top right and top left sections of petal A, resulting in petal B. FEA analysis showed that for petal B, these interpetal gaps were reduced by 31%, but were still very large for scooping small grains.
Next, a broader, nearly hemispherical petal (petal C) was chosen to close these interpetal gaps further. FEA analysis showed that gaps reduced significantly, compared to petal B. However, the petal shape resulted in large interpetal contact, interfering with the finger bending and scoop closure at the center of the scoop. This analysis helped us realize that petals with more tapered tips (i.e., petals A and B) worked better for closing the gaps near the center of the scoop due to lesser interactions between the petals. The side gaps were formed due to buckling of the petals when they were actuated along two different axes (due to finger bending and petal bellow inflation). To close these gaps, flaps at an angle of 120° to the petal surface were added to the sides of petal B, resulting in petal D. Figure 3H compares the areas of the gaps formed between the petals and the effective scoop volume of the four actuated grippers (effective volume being the scoop volume capable of holding grains of at least 3 mm diameter).
Scoops from petal shapes A, B, and C show large gaps either between the petals or at the centers of their respective simulated scoop volumes, rendering a large section of their scoop volume ineffective for scooping small grains. Petal D presents minimal gaps, hence has a significantly larger effective scooping volume, and is selected for the RWS gripper.
To enable passive nail compliance, it is essential that the foam used is compressible enough to allow retraction under low applied forces and extends back to its full length quickly when the forces are removed. FEA studies of the nail retraction and extension were performed on nail assemblies made of three different open cell foams, each having unique compression characteristics—High-Density Polyethylene Foam (F1), Ethylene Propylene Diene Monomer Foam (F2), and Low-Density Polyethylene Foam (F3). The study includes one loading step, where the nail is retracted and the foam is compressed, followed by another unloading step, where the foam extends back to its original length (Fig. 4A). Forces required to retract the nail assemblies (Fig. 4B) and the time required for the nails to restore to their full lengths once the forces were removed (Fig. 4C) were extracted from the simulations. While the restoration times for the different foams do not vary significantly, the force curves for Foam F3 show a lower and longer plateau, indicating higher nail retraction under lower applied forces, compared to other foams.

FEA of nails and palm.
The soft palm relies on inflating bellows to rotate the finger bases and increase the gripper aperture. Having an entirely soft palm would make the palm core inflate or deflate when actuated, leaving less pneumatic energy for inflating the bellows and, thus, making the aperture regulation less efficient. In addition, a soft palm core would make the gripper prone to vibrations during fast grasping and manipulation tasks. Hence, proper material distribution to enforce and stiffen the palm core while allowing the bellows to inflate easily is essential.
Palms with four unique material compositions were studied, using materials that represent the range of elastic moduli that is typically used in soft robots due to their stress–strain properties and abilities to transfer loads while actuated with positive and negative pressures—SortClear12 (“SC,” modulus 150 kPa) to MoldStar30 (“MS,” modulus 600 kPa) to SmoothSil960 (“SS,” modulus 2 MPa). The candidates consisted of two isotropic palms (labeled SS-Iso and MS-Iso) and two multimaterial palms (labeled SS-MS and SS-SC). Each palm's aperture regulation was studied by applying different positive pressures (Fig. 4D). Figure 4E shows the bellows inflation of all four palms at an input pressure of 35 kPa, and Figure 4F shows their aperture regulation. SS-MS offers the highest aperture range, setting the aperture at 158 mm for an input pressure of 35 kPa, and hence was selected for the RWS gripper.
Properties of the materials used in the FEA studies, along with their constitutive material relations, are listed in Table 1 (see Supporting Information Section 2 for the derivation of the hyperelastic and hypercompressible material modes). Setups of all FEA studies are detailed in Supporting Information Section 3. Supplementary Movie S1 shows selected animations for all actuators. For all the studies, the FEA predictions were verified by tracking the kinematics of the actuators experimentally (Supporting Information Section 7).
Mechanical Properties and Material Models of All Materials Used
For properties of materials evaluated in FEA, please refer to Supporting Information Section 2.
Flexural modulus.
Modulus measured at 2% strain.
Modulus measured at 100% strain.
PE, polyethylene.
Gripper Fabrication
Materials used for each gripper actuator are listed in Table 1, and material preparation is detailed in Supporting Information Section 5.
Finger fabrication
The finger fabrication involves internal geometry (i.e., finger wedges) and finger skin casting. Four-piece and three-piece mold assemblies were created using Fused Deposition Modeling (FDM)-printed components for the finger wedges and skins, respectively. The wedges and skins were cast separately using SmoothSil-960 and DragonSkin-30 and then assembled and bonded together by dispensing uncured DragonSkin-30 through slits present on the skin top and bottom (Fig. 5A). Once cured, a silicone tube was inserted, and 3D printed adapters were bonded to the finger base using Permabond 730 and POP Primer.

Reconfigurable workspace soft gripper fabrication.
Petal fabrication
For the bidirectional petal actuators, bellows were cast using SmoothSil-960 in a two-piece FDM-printed mold (Fig. 5B). A silicone layer of 1 mm thickness was prepared by depositing uncured SmoothSil-960 on a 3D-printed petal template and rotating the template in a spin coater at 300 deg/s for 80 s to achieve a uniformly thick layer. The cast bellows were carefully positioned on this uncured layer and cured to bond the cast bellows and petal flap. The finished petals were glued to the back of the finger assembly using silicone adhesive (Sil-Poxy).
Nail fabrication
The nail and telescopic channel were printed using a Polyjet J750 3D printer. An open cell polyethylene foam (LD450) was glued to the back of the nails and then slotted inside the nail channel. Silicon oil was carefully applied to the nail channel to allow the nail to retract and extend smoothly. The finger has a hollow fingertip cavity in which the nail assembly was then press-fitted (Fig. 5C).
Palm fabrication
The palm's soft bellows and walls were cast from a 3-piece mold assembly using MoldStar-30 and SmoothSil-960, respectively (Fig. 5D). In another FDM printed template, SmoothSil-960 was poured to form the palm base, on which the previously cast component was carefully placed. FDM printed adapters (ASA) were glued to sides and bottom of the palm. These adapters allow the mounting of fingers, as well as assembly of the palm and gripper on robotic manipulators. L-shaped hinges were cast using 2-piece FDM printed molds and SmoothSil-960, to be later glued to the side and bottom adapters using Permabond 730 and POP Primer.
Gripper Modes and Workspace Reconfigurability
Each actuator can be controlled independently using positive and negative pressures, enabling workspace reconfigurability of the soft gripper for different grasping tasks (Fig. 6 and Supplementary Movie S2). The electropneumatic setup for controlling the gripper is detailed in Supporting Information Section 5. To verify the FEA predicted kinematics of the gripper actuators, each actuator was tracked using video under different actuation inputs and compared with the simulation results (Supporting Information Section 7 and Supplementary Fig. S4). It was found that the finger actuators presented in this study could not only bend further (Fig. 6A) but also actuate faster (curvature of 47.88 m−1 and actuation time of 80 ms at −80 kPa) compared to our previous design (curvature of 32.09 m−1 and actuation time of 240 ms at −80 kPa). This can be attributed to the finger's new internal geometry with elliptical voids.

Actuation modes and grasping workspace:
Upon application of negative pressure to the petal actuators, the petals fold behind the fingers (Fig. 6D-II). In this state, the finger-petal assemblies behave like distinct digits, setting the gripper in spherical or cylindrical power grasping mode. The workspace of the gripper in this mode (Fig. 6B) is suitable for grasping large items such as the large tea box shown in Figure 6C. Alternatively, applying positive pressure to the petal actuator causes the petals to roll forward, toward the gripper palm. This changes the form factor of the fingers to wide scoop-like structures (Fig. 6D-III). In this state, fingers are bent under vacuum to form a closed scoop, enabling a scoop grasping mode with a significantly reconfigured workspace (Fig. 6E) suitable for grasping multiple items that are packed tightly or for scooping grains like legumes and dried beans (Fig. 6F).
When pressed against a surface, the passive retractable nails can automatically retract and adjust their length to be level with the surface even when the fingertip orientation changes (Fig. 6G). Once the nails are moved away from the flat surface, they return to their fully extended states. This pinch grasping mode allows the grasping of thin or small items with nonuniform geometries or low surface areas in the workspace shown in Figure 6H. An example, shown in Figure 6I, would otherwise require precise position control if done using fixed rigid nails, as the nail position would change with the finger curvature during finger bending.
Supplementing the power and pinch grasping modes, the gripper aperture can be controlled by applying positive or negative pressure to the palm, as shown in Figure 6J. In this aperture control mode, the gripper can reconfigure its workspace further (Fig. 6K) for grasping items larger than the gripper itself (Fig. 6L) or for closing (or focusing) the fingers for grasping a single item from a tightly packed cluster.
Actuation times for the gripper in different modes were recorded and are listed in Table 2. The gripper modes can be switched in <1s by changing the pneumatic inputs, except for the passive nail extension (1.35 s for an 11 mm extension). This fast switching allows rapid reconfiguration of the gripper workspace volume to suit the grasping task at hand.
Reconfigurable Workspace Gripper Properties
List of all the physical properties of the gripper, along with details of the different actuators—actuation time, inputs required, and actuation ranges.
Average diameter corresponding to dry couscous grains.
Payload measured while aperture is set at 62 mm.
Payload measured while aperture is set at 158 mm.
Gripper Characterization
The gripper aperture was characterized by tracking the diameter of the circle formed by the gripper fingertips at different palm inflation pressures. It was found that the aperture could be varied from 41 mm at −80 kPa up to 158 mm at 35 kPa, resulting in a 285% aperture change (the unactuated gripper aperture being 62 mm). From the experiment data, a linear relationship between aperture diameter and input palm pressure can be approximated (Supplementary Fig. S5) by the equation,
where Dap is the gripper aperture diameter (in mm) and Ppalm is the palm inflation pressure (in kPa). This relation can be used to estimate the palm pressures required for payloads of different sizes.
In power grasping mode, it is also essential to determine the gripper payload capabilities for items of various sizes. Using a custom setup shown in Figure 7A, peak grasping forces for geometries of different reference dimensions were measured and are shown in Figure 7B. The peak grasping forces are maximum for payload sizes closer to the gripper's unactuated aperture (∼62 mm). For objects that are smaller or larger than the unactuated aperture, the grasping forces decrease. This could be due to the nature of the aperture regulation, in which the rotation of the finger invariably changes the normal contact force exerted by the fingers on the payload for different aperture values.

Grasp characterization.
In a previous study, 25 nails were shown to grasp items as thin as 0.2 mm from flat surfaces by improving gripper contact area. However, grasping using nails was characterized only with thin cards of the same dimensions as the unactuated gripper aperture, ensuring that the fingers remained almost vertical throughout the grasp. For items that are smaller or larger than the gripper aperture, pinch grasping becomes challenging as the height of the nail tip changes when the palm or fingers are actuated to bring the nails closer to the items (Supplementary Fig. S6). This calls for a complex control strategy combining gripper actuation with precise robotic end-effector height offsets to ensure proper positioning of the nail tip (i.e., near the base edges of thin items). This problem can be avoided using passively retractable nails, where the nail tip stays level with the surface during finger or palm actuation.
To quantify the improvements of passively retractable nails over fixed nails, two experiments were carried out. First, cards of varying thickness t and the same diameter as the gripper's unactuated aperture (62 mm) were placed on a flat table. The cards were grasped using grippers without nails, with fixed rigid nails, and with passively retractable nails (Fig. 7C). The grasping was done by bringing the robotic arm to the same end-effector height (h = 152 mm) and then actuating the gripper. This grasping was repeated 20 times for each card thickness, and the success rate was recorded. For card thicknesses below 3 mm, grippers with nails perform more reliable grasping than grippers without nails (Fig. 7D). In addition, passive nails allow similar grasping performance as fixed nails for extremely thin cards of 0.2 mm thickness (i.e., no significant performance losses were observed due to nail compliance).
In the second experiment, circular cards of fixed thickness (t = 1 mm) and different diameters Dcard were grasped using fixed and retractable nails by regulating the aperture of the gripper through palm actuation to match the diameter of the card and then actuating the fingers. Since both palm and finger actuation cause a change in the height of the nail tip, grasping performance was tested across different end-effector heights h. For reference, h is measured as the vertical distance between the base of the gripper and the flat surface. Height offset (Δh) is zero for h = 152 mm and positive in the direction shown by the red arrow in Figure 7C. For negative height offsets, both fixed and compliant nails fail to grasp the cards when the gripper is too high, such that the nail tips do not make contact with the card edges (i.e., when Δh < −t). For positive height offsets, in the fixed nails case, success over 50% can be seen only over height offset (Δh) ranges spanning 1–2 mm (Fig. 7E), after which the nails hit the flat surface, temporarily locking finger bending or causing jerky finger bending.
Alternatively, in the passively retractable nails case, higher success can be seen over a larger height offset (Δh) range, spanning 5–8 mm, indicating that the passively retractable nails can reliably pinch grasp thin items without very strict control of the end-effector height. To summarize, both fixed and compliant nails will fail if the gripper is moved higher than the card thickness. For cases where the gripper is moved too low, fixed nails can grasp only for errors up to 2 mm (or 15% of nail length), while compliant nails can tolerate offsets of up to 8 mm (or 65% of nail length). The compliant nails allow for reliable grasping of cards having diameters varying from 30 to 90 mm (48–145% of gripper's unactuated aperture diameter). While apertures smaller and larger than this range can be achieved by the gripper, the current nails are not capable of error-tolerant pinch grasping of cards with diameters smaller than 30 mm or larger than 90 mm due to a limited nail retraction length.
To automate tasks using scooping mode, it is essential to have control over the amount of payload scooped per grasp. This can be achieved by varying the depth of gripper penetration into the granular medium. During scooping, it can be assumed that commonly scooped items (such as rice, grains, and so on) are small, lightweight, and have cumulative friction forces much lower than the bending force of the actuators. Hence, the petals undergo minimal deformation due to contact with the granular items, and the final scoop shape is mostly defined by the petal and finger's inherent kinematics. In context of the payloads mentioned above, in scoop grasping mode, the scoop volume resembles a Reuleaux's triangle extrusion of side length equal to the width of the petal wp. Using geometry, a simple relation for the number of scooped grains, N, at gripper penetration depth d (Fig. 7F), can be derived as,
where φ and R are the packing fraction and radius of the granular items, Lf is the finger length, and Vfinger is the finger volume. Supporting Information Section 6 details the derivation of Eq. (2). To verify this concept, scoop grasping tests of foam beads of different radii, R, at different penetration depths, d, were conducted using a UR10 robotic arm (Fig. 7F). The number of beads scooped was estimated by weighing the scooped beads using a semimicro balance. Figure 7G shows the variation of the number of beads scooped for different gripper depths along with the values predicted using Eq. (2), indicating good agreement between predictions and experiment results. In the case of larger or heavier grains, the petals could deform in contact with the grains, resulting in a different scooping volume, and hence, the scooping behavior would deviate from Eq. (2). Understanding the petal-grain interaction will improve the model, but it is outside the scope of the current study.
Discussion
The gripper presented in this study overcomes limitations posed by previous grippers using a well packaged design of multimaterial soft actuators and passive compliant mechanisms to produce considerable reconfigurations in the gripper workspace volume without increasing the gripper volume or weight. In each grasping mode, at least two actuators are used simultaneously to create grasping modalities beyond those of single actuators. For instance, in scoop grasping mode, the fingers and petals are used in unison. The studies (depicted by Fig. 3C, D, and Fig. G) are aimed to explore the coupled kinematics of the finger bending and petal actuation, along with the impact that the fingers and petals have on each other. Similarly, gripper characterization shown in Figure 7E aims to understand the pinch grasping due to compliant nails in conjunction with finger bending and aperture regulation. The nails passively extend or retract based on the finger's bending and palm's aperture allowing robust and error-tolerant grasping of cards having a wide range of diameters.
The new finger design allows for a 56.54% increase in bending curvature over the previous iteration. More actuator bending results in a larger grasping workspace, which has been shown to allow for grasping of a wider range of geometries.51–53 The retractable nails enable simple and passive control of fingertip position on contact surfaces despite changes in curvatures of the fingers during grasping. In addition, the nails are tolerant to offsets in nail tip positioning of up to 65% of the nail length. The gripper can seamlessly change its aperture by more than 285% (from 41 to 158 mm) to better grasp different item sizes. Finally, the gripper can also alter its finger width from regular cylindrical fingers well suited to grasp a wide range of large objects to wide scoop-like fingers better suited for granular payloads.
The gripper can vary its workspace volume by 397%, from power grasping mode (91 cc) to scooping mode (482 cc), estimated from simulations (Fig. 8A). While these quantitative changes in gripper workspace impact the payload sizes, workspace reconfiguration also qualitatively changes the workspace shape, which in turn modifies the contact area (Fig. 8B). In pinch grasping mode, the nails allow to change the gripper contact area to apply the grasping forces precisely to the edges of thin items being grasped. In addition, in scoop grasping mode, the contact area is changed to that of a closed shell with no gaps, allowing for grasping of granular payloads. For power grasping mode, the contact area is changed to the discrete finger surfaces, which allows for unobstructed grasping of large payloads.

Workspace volume and grasping capabilities.
Due to the multiactuator design, the payload capacities of the RWS gripper vary with the different grasping modes. Table 2 lists the heaviest, as well as the smallest, payloads possible with the four grasping modes. Pick and place trials using payloads of a wide variety of sizes, geometries, and weights, commonly found in the food and consumer goods industries, were conducted using the RWS gripper and a UR10 manipulator. Figure 8C and Supplementary Movie S3 show the gripper using its various modes for a wide variety of payloads ranging from a small coin to bubble tea pearls to wide glass beakers. Figure 8D shows the RWS gripper grasping a few objects from the Yale-CMU-Berkeley (YCB) dataset. 54 All payloads tested, including YCB payloads, are detailed in Table 3.
All Payloads Tested with Reconfigurable Workspace Soft Gripper
Grasps for all payloads were tested using a vertical pick-and-place robot trajectory, similar to the one shown in Movies S3–S5.
Payloads from the YCB dataset.
CD, compact disc; YCB, Yale-CMU-Berkeley.
The RWS gripper's ability to quickly reconfigure its grasping workspace makes it an ideal candidate for challenging applications for which different task-specific grippers would otherwise be used. Supplementary Movies S4 and S5 show the RWS gripper performing food cup and plate assembly involving highly unique subtasks. By changing its workspace on-the-fly, the gripper can perform these unique subtasks in succession (e.g., changing from pinching gripper for packing thin slices to a scooping gripper for rice), thus eliminating the need for changing grippers and associated downtimes. Due to the use of commercial food-safe and heat tolerant silicones, the RWS gripper can handle hot, cold, and wet payloads. In addition, any remnant wet foods or dry grains stuck to the gripper's surfaces can be removed by immersing the gripper in water (as shown in Supplementary Movie S5).
In summary, the RWS Gripper presented in this study exemplifies the positive impact of gripper workspace volume reconfigurability on grasping versatility. However, workspace volume configurability is not the sole metric for gripper performance. For instance, in adhesion-based grippers, the gripper performance can rely more on the adhesion characteristics than the gripper workspace volume. Future studies will expand this gripper metric to combine workspace volume reconfigurability, contact area, and adhesion. Gripper workspace reconfigurability will be developed further through more actuation modes and morphologies to help to achieve the ideal RWS concept described in Figure 1B.
Follow-up studies will also address the following inter-related challenges: (1) shape morphing actuation and control, (2) topology optimization for improving payload capabilities, and (3) advanced fabrication. Functional materials such as piezoelectric, conductive silicones and fibers55,56 can be embedded inside the soft structure of the RWS gripper to improve each actuator's workspace while enabling pose and force sensing for closed loop control. Building on the FEA studies presented in this work, design and topology optimization tools 57 can also be used to increase the gripper payload capabilities (i.e., size and weight of payloads in each grasping mode). Finally, advanced additive fabrication techniques 58 can be implemented to enable cofabrication of the complex 3D composite structures needed for both sensing and optimized gripper morphologies. Future studies will also be done to explore kinematics and payload capacities of other actuator combinations (e.g., scooping with aperture control).
Footnotes
Acknowledgment
The authors acknowledge Soh Gim Song for facilitating the use of a UR10 robotic arm for experiments.
Authors' Contributions
P.V.Y.A. led and guided the concept ideation, development, and experimental efforts. S.J., S.D. and J.E.M.T. designed the gripper, and. S.J. derived hyperelastic material models from test data, and S.J. and S.D. performed FEA simulations to refine the design of all gripper features. S.J. and J.E.M.T. fabricated the gripper and conducted the grasping characterization and robotic grasping tests. All pictures and videos were taken by S.J., S.D., and J.E.M.T. and edited by S.J. S.J. and P.V.Y.A. drafted the article, and J.E.M.T, S.D., and S.J. prepared all Figures. All authors contributed to the proof-reading of the article.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This project was supported by the Agency for Science Technology and Research (A*STAR), National Robotics Program, under its Science and Engineering Research Council (SERC) awards 1822500053 and W2025d0243.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.