
Abstract
The concept of creating all-mechanical soft microrobotic systems has great potential to address outstanding challenges in biomedical applications, and introduce more sustainable and multifunctional products. To this end, magnetic fields and light have been extensively studied as potential energy sources. On the other hand, coupling the response of materials to pressure waves has been overlooked despite the abundant use of acoustics in nature and engineering solutions. In this study, we show that programmed commands can be contained on 3D nanoprinted polymer systems with the introduction of selectively excited air bubbles and rationally designed compliant mechanisms. A repertoire of micromechanical systems is engineered using experimentally validated computational models that consider the effects of primary and secondary pressure fields on entrapped air bubbles and the surrounding fluid. Coupling the dynamics of bubble oscillators reveals rich acoustofluidic interactions that can be programmed in space and time. We prescribe kinematics by harnessing the forces generated through these interactions to deform structural elements, which can be remotely reconfigured on demand with the incorporation of mechanical switches. These basic actuation and analog control modules will serve as the building blocks for the development of a novel class of micromechanical systems powered and programmed by acoustic signals.
Introduction
Soft materials can be programmed to change their physical properties such as shape and stiffness on-the-fly by the externally applied light, heat, mechanical forces, or magnetic fields.1–5 Such material formulations have great potential, particularly at small scales, to achieve functionalities that are unattainable by conventional mechatronic systems.6–13 Notably, simple mechanical structures fabricated from magnetorheological or liquid crystal elastomers displayed a virtually unlimited number of degrees of freedom (DOF), as a result of either the spatial complexity of the magnetization profile14–16 or the use of structured illumination.17,18 Moreover, rationally designed flexible structures, also known as mechanical metamaterials, can realize programmable digital logic.19–29 This route for physical intelligence has already been pursued by living organisms,30–32 and extensively studied for the development of autonomous soft robots.33–36
Acoustofluidics has several unique properties that can reveal the full potential of programmable soft matter. Air bubbles are efficient transducers that generate forces through interactions with the external pressure waves, the surrounding fluid, and with each other.37–45 Therefore, these interactions can be programmed by modulating the acoustic wave as well as the geometry and the spatial distribution of bubbles. The generated forces are determined by primary and secondary acoustic effects that are highly nonlinear. Thus, a detailed understanding of the underlying physics is instrumental to using air bubbles for controlling deformable elements. To address this unmet challenge, we combined analytical modeling, finite element simulations, and experimental analysis that involved detailed characterization of acoustic pressure, bubble oscillations, and forces generated by bubbles with coupled dynamics.
In this study, we present an integrated design, fabrication, and control methodology that transforms monolithically printed flexible structures into programmable soft robotic systems. The key innovation is the spatial patterning of polymer capsules that stably contain individual air bubbles along ultraflexible beams using direct laser writing (Fig. 1a, Supplementary Fig. S1 and Supplementary Movie S1). By tuning the geometry of the capsules and the architecture of the material, we precisely controlled the acoustofluidic interactions (Fig. 1b, c). We demonstrate the compatibility of our acousto-active systems with mechanical logic by constructing actuated bistable mechanisms.

Conceptual illustration of the presented methodology.
Results and Discussion
The basic actuator module consists of a 3D printed cylindrical capsule with a single circular orifice (Fig. 2a). A similar manufacturing technique and geometry has been recently used to generate polymer microparticles with liquid-phase core. 46 We printed all the structures as a monolithic piece from a single biocompatible soft polymer, trimethylolpropane ethoxylate triacrylate (TPETA), 47 using two-photon polymerization (Fig. 2b). A detailed description of the experimental methods and control system, including the peripheral electronics is provided in Supplementary Note S1 and pictured in Supplementary Figure S9. Within this capsule, the bubble is physically isolated from the surrounding fluid except at the side of the opening (Fig. 2c). Acoustic excitation of a single bubble submerged in liquid generates microstreaming. 48 By entrapping bubbles inside cavities, their oscillations are constrained to regions defined by the orifices.

Design, fabrication, and operation of acoustic actuator modules.
In this configuration, acoustic streaming generated counter-rotating vortices and a jet localized in the center, which was captured using high-speed recordings of tracer particles around the actuator module (Fig. 2d). Once an actuator is connected to a cantilever beam, it is expected to generate thrust normal to the orifice's plane, thereby deforming the beam. By carefully tuning the acoustic frequency, different vibration modes of the coupled fluid-structure system can be excited. 49 The vibration modes are manifested by the unique deformation patterns of the bubble at the interface. Nevertheless, we focused our attention on the first mode because, assuming a uniform distribution, the projection of the impinging pressure is maximal.
Large deformation and complex motion can be generated with slender structural elements, including beams, plates, and shells.50–52 We have recently developed an analytical model that calculates the natural frequencies and corresponding vibration modes of bubbles entrapped inside arbitrarily shaped cavities with multiple circular orifices. 49 In brief, we extended a previously published model 53 to accommodate multiple orifices on the same cavity, incorporate all the possible mode shapes, and consider the geometry adjacent to the orifice. We derived the model by formulating the potential and kinetic energy in the system. The contribution to the kinetic energy comes from the fluid motion while the gas compressibility and interface deformation determine the potential energy. The acoustic wavelength is much larger than the capsule's largest dimension for the frequencies studied in this work. Thus, the instantaneous pressure in the gas can be considered uniform and, as a result, the interior shape of the capsule has a negligible effect. The spherical shape was chosen to maximize the gas volume, increase the bubble's stability, and simplify the printing procedure.
We recorded the power spectrum of the ultrasound transducer using a hydrophone to determine the frequency bands at which the actuators could be effectively powered (Supplementary Fig. S2). Using our model, we designed the geometry (i.e., volume and orifice radii) so that the first natural frequencies of the entrapped bubbles are within these bands (Fig. 2e). For the chosen parameters, variations in the bubble orifice radius, R, have a greater influence on the natural frequency than the internal volume, Vc, because R influences both the potential and kinetic energy of the system. We printed two capsules with orifice radii of 7.75 and 13 μm, respectively (Supplementary Table S1). Entrapped bubbles were actuated selectively at their estimated natural frequencies of either 85 or 170 kHz, which led to a sequential deformation of the beams (Fig. 2f and Supplementary Movie S2).
Actuators with orifices close to the substrate are not ideal for the quantification of forces because the entrapped bubbles may interact with the substrate's surface.44,45 To minimize such perturbations, we printed the beams vertically, raising the actuator modules 50 μm above the substrate (Fig. 3a). Laser scanning confocal microscope images of fluorescently labeled samples verified that the structures were printed according to the CAD design (Supplementary Fig. S3). In this configuration, the beam bending could be followed from the actuator's in-plane displacement (Fig. 3b), which increased quadratically with the input voltage (Fig. 3c). The bending modulus was calculated from the material's Young's modulus, E = 13 MPa, 47 and the dimensions of the beam were measured using electron microscopy (Supplementary Fig. S3). The generated force was then estimated using linear beam theory (Supplementary Note S2).

Mechanical characterization of the actuator module and the pressure field.
Although the linear theory was used, the displacement is a nonlinear function of the applied force because the part of the beam corresponding to the location of the actuator was taken as rigid (Supplementary Fig. S10). The tip displacement, δ, is given as:
where L is the length of the beam, l is the length of half the actuator, E is Young's modulus, I is the second moment of inertia of the cross-section and P is the applied force. Nonlinear finite element method (FEM) simulations (i.e., large deformations) using linear elastic material (E = 13 MPa and Poisson's ratio is taken as 0.45) were in perfect agreement with the analytical model, thus confirming that the linearity assumption was acceptable for the given range of deflections (Fig. 3d). The analytical model was used to calculate the total force acting on a deforming beam from the recorded deflection.
We observed a linear relationship between the voltage applied to the transducer and the resultant acoustic pressure measured by a hydrophone (Fig. 3e), as predicted by the theory. 54 The acoustic energy density in the workspace quadratically increases with increasing pressure, 55 and so does the streaming velocity around the bubble. 44 Sequentially increasing the input voltage resulted in a new configuration within milliseconds. Furthermore, when the input voltage was turned off, the beam immediately returned to its original position, confirming that the actuation was in the elastic range. We characterized the oscillation amplitude at the bubble's first natural frequency using a custom-built experimental platform (Supplementary Fig. S4). The data showed that the deflection amplitude at the air–fluid interface increases linearly for the range of pressure we applied (Fig. 3f).
An actuator module with multiple DOF would drastically increase the dexterity and form factor of printed structures. We postulated that a capsule, which contains multiple orifices of different sizes, would serve this purpose. To test this idea, we printed an actuator module in the shape of an equilateral triangular prism with three orifices, one at the center of each face (Fig. 4a). The actuator module was connected atop a 50-μm-long and 2-μm-diameter cantilever beam. The sizes of the orifices (15, 9.5, and 7 μm) were chosen in a way that corresponding natural frequencies were well spaced and within the effective range of the transducer (Fig. 4b). Simulation results have shown that primarily one interface is deformed at each mode (Fig. 4c).
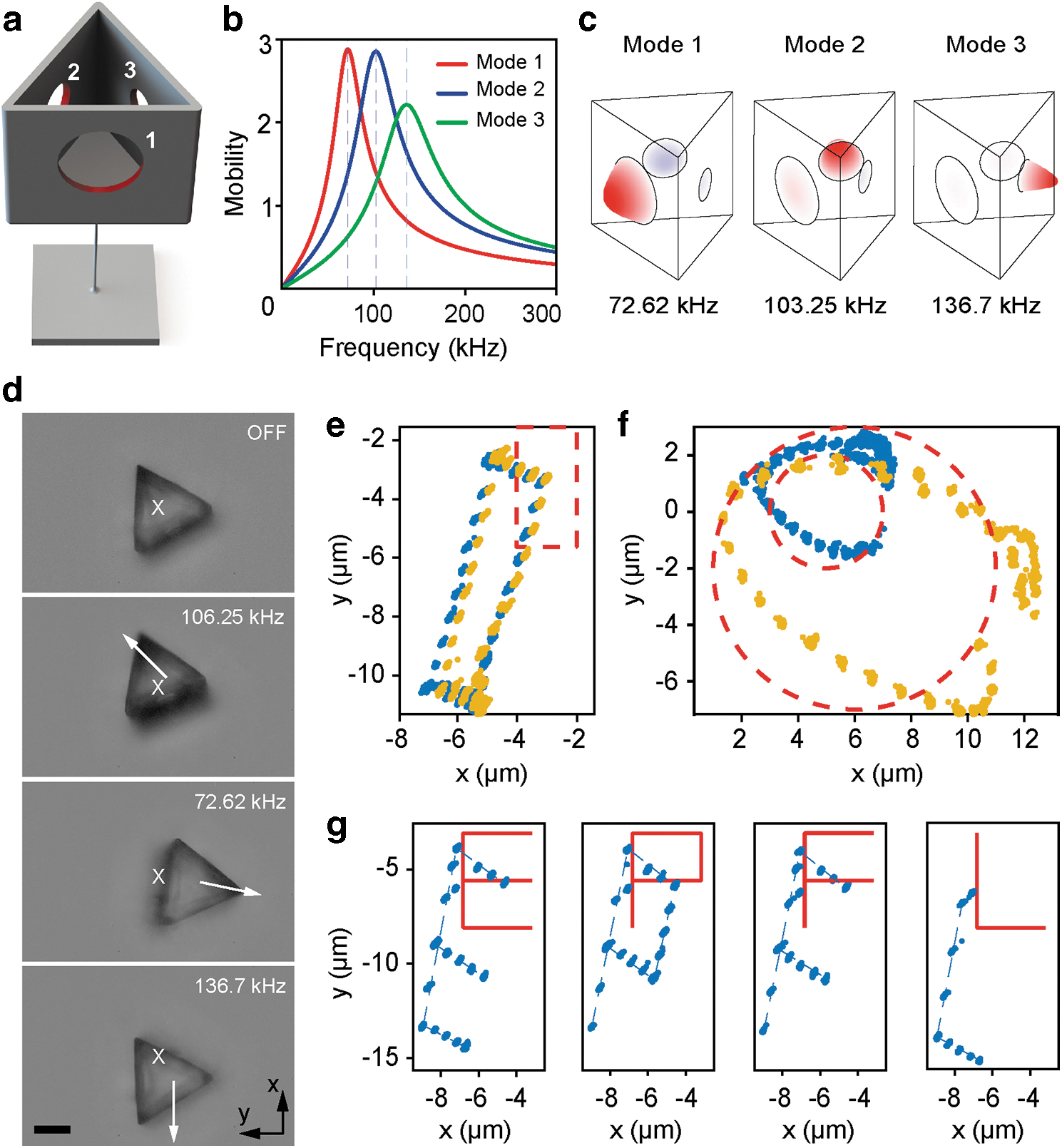
Design, calibration, and control for multi DOF motion.
We excited the system at multiple frequencies simultaneously to control the position. The force is unidirectional, therefore, at least three frequencies are required to fully control the 2D position. Ideally, these frequencies are the ones where the largest displacement is obtained, which are expected to be the bubble's natural frequencies. However, the transducer has its own dynamical response, and the input pressure varies with the excitation frequency (Supplementary Fig. S2). We addressed this issue by experimentally calibrating the response of the system.
We recorded the actuator motion while sweeping the frequency from 40 to 160 kHz at a constant input voltage. Using a subpixel resolution image processing algorithm, 56 we extracted the planar position of the module (Supplementary Fig. S5a). We then selected three frequencies where the largest deflections in different axes were recorded. Figure 4d shows the undeformed and deformed states of the system at the chosen frequencies. Next, we measured the actuator's deflection at each frequency and built the vectors spanning the planar displacement field. We implemented an open-loop controller that leverages the superposition principle and excites the system with a signal comprising three harmonic terms, which correspond to the aforementioned vectors. We controlled two DOF with three forces, thus, there are infinite combinations. We solved a constrained linear least-squares problem, 57 where we minimized the voltage signal amplitude.
We performed a series of experiments to evaluate the control strategy. First, we programmed a calibrated device to repeatedly follow a rectangular trajectory, slightly offset from the origin where we had better control over the motion (Fig. 4e). Second, we programmed several circular trajectories with different radii and offsets (Supplementary Movie S3). The position error increased with the distance from the origin (Fig. 4f). Third, we used the calibration parameters of one device to control another with the same design (Supplementary Fig. S5b). The trajectories of the two devices were close, suggesting that calibration might be performed once and used repeatedly for different devices. As a final demonstration, we designed four trajectories prescribing the initials Ecole Polytechnique Fédérale de Lausanne to show that control was not limited to specific geometries (Fig. 4g).
Acoustically excited bubbles interact with each other through the surrounding fluid when they reside in close proximity. The total force acting on a bubble is the result of the exciting primary pressure field, and higher-order fields emanating from neighboring bubbles that also act as acoustic sources.38,58 The distances between bubbles are significantly smaller than the acoustic wavelength in all our prototypes. Therefore, we can assume that the acoustic radiation forces caused by the primary field do not affect the relative displacement of the actuators. The secondary forces that act on the coupled actuators are thrust, drag-induced acoustic streaming, and secondary acoustic radiation force (also known as secondary acoustic radiation force or secondary Bjerknes force). Identical bubbles are expected to generate the same acoustic streaming; thus, the generated thrust would push the bubbles away from each other. On the other hand, the magnitude of the acoustic radiation force, which primarily acts to pull the bubbles toward each other, depends on the distance between them.38,58
The total force,
where
To quantify the total force generated by interacting bubbles, we printed two adjacent cantilever beams with identical actuators that were faced toward each other (Supplementary Table S1). The initial distance between the actuators, di, was systematically varied to study the effect of spacing. At equilibrium, |

Characterization of acoustic radiation forces between two actuator modules.
Figure 5e summarizes the nonlinear responses of coupled actuators with respect to the initial distance and the input voltage. The further away the actuators were from each other at rest, the more the beam deflection resembled that of the isolated single beam (Fig. 3c). Based on this empirical observation, we hypothesized that the dynamics could be captured by an analytical model where all forces are proportional to the input voltage squared.
59
We assumed that
We also assumed that
where
Our results have shown that radiation forces between identical actuator modules do not change direction for a given spacing. Actuators with different orifice sizes displayed more complex interactions. We discovered that depending on the excitation frequency, actuators with the same initial distance attracted or repelled each other. An analogous phenomenon was observed between acoustically excited free-floating spherical bubbles with different radii.38,58
Different bubbles oscillate with a different amplitude and phase for the same impinging pressure wave (Fig. 5f). The relative oscillation phase dictates the direction of the radiation force. When the bubbles oscillate in a relative phase of less than a quarter of a period, the force is attractive, but if the phase differs by more than a quarter but less than three-quarters of a period, the force is repulsive. Therefore, identical bubbles tend to attract each other, and nonidentical bubbles can either attract or repel each other, depending on the excitation frequency (Fig. 5g). In our experiments, actuator modules with cavity radii of 25 and 17.5 μm and orifice radii of 10 μm, attracted or repelled one another at 85 and 125 kHz, respectively (Fig. 5h and Supplementary Movie S5).
We designed a flextensional mechanism that leverages this frequency-dependent behavior to manifest multiple distinct deformation patterns on the same system (Supplementary Fig. S7 and Supplementary Movie S6). Both couples of arms simultaneously closed at one frequency, and one couple opened while the other closed at another frequency. The frequencies at which the arms would open or close were determined by the relative phase of oscillations, which was modified by capsule geometry. Both operation modes were independent of the input signal amplitude, therefore, the angle between the arms could be tuned with the applied voltage.
So far, we focused on a paradigm where actuator modules were patterned on different structures. In this arrangement, a rapid increase in radiation forces with decreasing distance limits the range of motion that the actuators can generate. To extend the interval at which the structure bends in a graded fashion, we constrained the actuators' motion. To this end, we connected two actuators with a truss so that they were not allowed to come very close to each other (Fig. 6a). As expected, the arms progressively bent out of plane for a large range of input voltage (Supplementary Movie S7). To report the deformation, we recorded the displacement of the actuators along the y-axis (Fig. 6b). Although the arms bent under the dominant radiation forces, the displacement curve did not follow the highly nonlinear trend presented in Figure 5e. We built a FEM model of the mechanism based on the CAD design and the material properties (Fig. 6c, d). The radiation force magnitude and its direction are expected to change as the arms bend due to the relative position of the bubbles.

Mechanical programming of soft micromachines.
We simplified the model by assuming that the radiation force always acted to pull the actuators toward each other, and its magnitude was proportional to the thrust. We took the thrust calculated for a single actuator module (Fig. 3) as input and estimated the acoustic radiation force for the applied voltage values by fitting the empirical data shown in Figure 6b. In this study, the acoustic radiation force was taken as
The out-of-axis bending is a classic example for unimorph actuators where we control the angular displacement. By simply connecting a microbubble pair with an ultraflexible spring mechanism, we developed a linear microactuator (Fig. 6e). Acoustic forces were primarily uniaxial and, as expected, we did not observe out-of-axis deflection during operation (Supplementary Movie S8). Attractive radiation forces between the two microbubbles caused the gap to narrow. The deflection of the spring followed an almost linear trend with respect to applied voltage until the bubbles were 20 μm apart, at which point the radiation forces overcame the structural stiffness leading to a fast closure of the mechanism (Fig. 6f), similar to the pull-in instability observed in microelectromechanical systems devices. 60
When the excitation signal was turned off, the acoustic forces vanished, and the actuator returned to its initial position. We calculated the magnitude of forces that correspond to the input voltage using Equation (3) and applied these forces to an FEM model. The model captured the behavior of the experimentally recorded spring deflection, verifying that we have a reliable way of calculating forces generated by the acoustic actuator modules (Fig. 6f, g). We calculated the stiffness of the spring as 0.7563 nN/μm by computing the derivative of the displacement with respect to the total force (Supplementary Fig. S8).
Constrained elastic beams can exhibit complex mechanical responses depending on the geometry, degree of confinement, and boundary conditions. Previous work has shown that such mechanisms instantiate embodied logic and programmable functionality in soft machines.19,33,61,62 We designed beams to present a snap-through instability so that application of a relatively small thrust would be sufficient to cross the energy barrier and trigger rapid and large deformation toward a second stable configuration. Key geometric parameters for the beam design are the inclination angle of the beam, θ, and the slenderness ratio,

Mechanical reprogramming of soft micromachines through elastic instabilities.
For a fixed beam length and cross-sectional profile, as
We used a 2D FEM model to obtain the double-well potential energy landscape for the same design parameters (Fig. 7d). The simulation results showed that the strain energy quadruples when
We harnessed frequency-selective thrust generation to realize reversible actuation for the bistable mechanism (Fig. 7e). We kept the bubble size constant and tuned the actuators' orifice size to be able to activate them at distinct frequencies, 85 and 170 kHz (Fig. 2e). Connecting two actuator modules with a single beam to the anchor point proved to be undesirable. To stabilize the structure and ensure reliable operation, we extended the mechanism by adding support structures. The resulting mechanism could be switched repeatedly at the same amplitude and excitation frequency (Supplementary Movie S9).
As a final demonstration, we programmed the motion of a continuously bending cantilever beam using an actuated bistable mechanism, which we refer to as the control module (Fig. 7f-left). Here, triggering the control module changes the direction of bending by introducing radiation forces to a system otherwise driven solely by acoustic streaming (Supplementary Movie S10). To trigger the controller and actuate the beam at different frequencies, we engineered capsules with different geometries. At 125 kHz, the beam bent clockwise while the control module stayed idle (Fig. 7f-middle). Exciting the system at 85 kHz activated the bubble located on the left of the control module, moving the right one closer to the actuator connected to the beam. The control module stayed in this stable state when the system was turned off, as expected. Then, exciting the system again at 125 kHz bent the beam counterclockwise due to the attractive radiation forces generated between the two neighboring bubbles (Fig. 7f-right).
In this prototype, the control module must be reset manually because the radiation forces are stronger than the thrust. However, by tuning the bubbles' geometry, we can introduce a third frequency at which the control module would be reset.
Conclusions
We introduced a suite of mechanical microsystems with relatively basic design yet complex motion. Precise control over geometric parameters facilitated detailed analysis of forces and fluid–structure interactions. We made two important discoveries. First, we showed that a single bubble can provide multiple-DOF motion along prescribed trajectories with high fidelity through the application of frequency- and amplitude-modulated acoustic signals. Second, as a result of higher-order interactions, forces between oscillating bubbles emerge, and their amplitude and direction can be programmed by tuning the excitation frequency. The realization of the former required printing of capsules with multiple orifices at different sizes, a calibration process, and dynamic control.
Direct laser writing has been used to develop wireless soft microactuators powered by magnetic fields 63 and photothermal effects.64,65 Acoustic actuation is appealing for in vivo biomedical applications, specifically to remotely steer ultraflexible microcatheters 66 and control the release of biologics from miniaturized wireless implants. 67 Ultrasound is minimally invasive, acoustic microactuators are compatible with magnetic resonance imaging, generating acoustic waves does not require sophisticated and expensive equipment, and the whole device is fully biodegradable.
We developed an open-loop control scheme that drives a mechanical system to follow prescribed trajectories by applying a complex signal, based on the model and calibration. The position errors between the programmed and executed motion are not negligible, which may stem from multiple sources. We assumed that the 3D printed cantilever beam has isotropic stiffness. However, the material stiffness depends on the degree of polymerization, which might show spatial variations along the vertical axis. Moreover, the controller assumes small deflections although the beam deflected beyond the limit defined by the theoretical linear model. Finally, at relatively large deflections, the beam started to tilt out-of-plane and rotate around its axis while we only considered in-plane translation.
We focused our attention on geometric arrangements of entrapped bubbles, as a means to program the soft robotic system. Leveraging frequency-selective bubble excitation, we could operate systems in different modes at different frequencies. Considering the interactions among neighboring actuators would advance the programming framework. An actuator may be attracted to other actuators from multiple directions, realizing a sophisticated motion that highly depends on the excitation frequency and time-varying spacing among bubbles. We have also incorporated acoustically actuated bistable mechanisms as onboard control units to introduce the capability to operate in different modes under the same input signal.
This last functionality represents the first step toward reconfigurable mechanical systems that operate analogously to mechatronic systems. To this end, reversible switching of several bistable structures will be instrumental. Moving forward, bistable beams could be replaced by 3D architected materials that display sensing, pattern analysis, and multistability.68–70 The fabrication of such complex structures is feasible with two-photon lithography, and local actuation initiated by entrapped bubbles will reveal unprecedented reconfigurability and multifunctionality.
Footnotes
Acknowledgments
The authors thank Dr. Guillermo Villanueva for generously providing the vibrometer, Dr. Pedro Reis for fruitful discussions, and Furkan Ayhan for his assistance with electron microscopy imaging.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work was supported by the European Research Council (ERC) under the European Union's Horizon 2020 research and innovation program (Grant agreement No. 714609), and the Marie Sklodovska-Curie Actions Postdoctoral Fellowship (Grant agreement No. 101022448).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.