
Abstract
Soft continuum bodies have demonstrated their effectiveness in generating flexible and adaptive functionalities by capitalizing on the rich deformability of soft material. Compared with a rigid-body robot, it is in general difficult to model and emulate the morphology dynamics of a soft continuum body. In addition, a soft continuum body potentially has an infinite degree of freedom, requiring considerable labor to manually annotate its dynamics from external sensory data such as video. In this study, we propose a novel noninvasive framework for automatically extracting the skeletal dynamics from video of a soft continuum body and show the applications and effectiveness of our framework. First, we demonstrate that our framework can extract skeletal dynamics from animal videos, which can be effectively utilized for the analysis of soft continuum body including animal motion. Next, we focus on a soft continuum arm, a commonly used platform in soft robotics, and evaluate the potential information-processing capability. Normally, to control such a high-dimensional system, it is necessary to introduce many sensors to completely capture the motion dynamics, causing the deterioration of the material's softness. We illustrate that the evaluation of the memory capacity and sensory reconstruction error enables us to verify the minimum number of sensors sufficient for fully grasping the state dynamics, which is highly useful in designing a sensor arrangement for a soft robot. Also, we release the software developed in this study as open source for biology and soft robotics communities, which contributes to automating the annotation process required for the motion analysis of soft continuum bodies.
Introduction
Living organisms incorporate elastic body tissues to realize smooth and adaptive behavior in uncertain environments. Motivated by the ubiquity of soft structures in creatures, soft robots have been developed that incorporate the deformability of soft material.1,2 In addition, the diverse spatiotemporal pattern of soft continuum bodies has recently been highlighted as a novel tool for implementing adaptive behavioral controllers,3–6 sensors,7–12 and information-processing devices.13–15 To sum, the dynamic property of soft material will be exploited to realize the versatile functionality in developing next-generation robots.
It is, however, challenging to quantitatively capture skeletal dynamics of a soft continuum body in biology and soft robotics. Unlike a conventional rigid-body robot, soft continuum bodies are often continuous, and modeling their dynamics potentially requires an infinite state space. Owing to the intrinsic nonlinearity and hysteresis of soft materials, soft continuum bodies generate a rich variety of dynamic deformation patterns when actuated, making it difficult to construct a precise model describing the deformation dynamics.16,17 Moreover, the morphology displacement may be able to be measured by embedded sensors. However, the implanted sensors often impair a material's softness, limiting the number to be used. Therefore, to completely grasp the deformation dynamics of a soft continuum body, it is desirable to extract the skeletal dynamics by noninvasive external sensors such as video cameras or laser rangefinders.
In the field of computer vision and imaging science, skeletonization has been an important topic for finding compact representations of objects from the image for many years. 18 Blum's pioneering work 19 first formulated the concept of object skeletons and established the foundation of skeletonization. Blum's skeleton is obtained by the grassfire transform process and analytically defined as a set of collision points of two independent curves propagating from the object boundary at a constant velocity. 20 Based on the grassfire transform process, many approaches have been developed, including geometric approaches approximating the skeleton using the Voronoi diagram21–23 and continuous curve propagation approaches emulating grassfire propagation with partial differential equations.24–27 The skeletonization technique has been widely employed in various image processing and computer vision applications. In particular, medical imaging widely uses skeletonization to extract the centerline of blood vessels and arteries from computed tomography imaging.28,29
Many frameworks have also been proposed to extract skeletal dynamics from the video recording of the motion of a soft continuum body. To analyze the complicated behavior of an octopus, a framework for extracting a three-dimensional (3D) arm trajectory was developed using multiple video cameras.30,31 The skeletonization algorithm is easily accomplished by simulating Blum's grassfire process on the digital grids. By parameterizing the contour with elliptic Fourier descriptors, it is possible to describe the morphology dynamics of soft continuum bodies. 37 Also, deep neural network (DNN) models that track characteristic points on video have recently been proposed, which would be powerful options for skeletonizing soft continuum bodies.33,38 Although these approaches based on computer vision are useful in skeletonizing soft continuum body dynamics, they have several drawbacks. For example, the endpoint coordinates of the skeleton should be manually specified for all video frames in the octopus arm tracking system used in Refs.30,31 The model-free method based on the elliptic Fourier descriptors 37 is not suitable for extracting skeleton dynamics because it does not provide direct information of the skeletal coordinates. It is necessary to prepare annotation data and fine-tune the model in the methods based on DNN (Table 1). 33 Also, the markers were directly attached or written on the soft continuum body as a reference point,8,14,39,40 which involves an invasive process and cannot be used, especially with animals.
Comparison with Other Markerless Methods That Can Skeletonize Soft Continuum Bodies (
In this study, we propose a novel framework called SSS (Soft Skeleton Solver) for skeletonizing soft continuum body dynamics based on a background subtraction algorithm and a skeletonization algorithm
36
using a fast marching method (FMM).
35
By employing the minimum distance field and the traveling time field calculated during the skeletonization algorithm, our framework can effectively and automatically extract the endpoint coordinates and skeleton curve of the soft continuum body on all frames except the first one. Furthermore, by specifying the resolution and tracking parameters, it is possible to extract the skeleton curve with arbitrary accuracy. Below, we list the contributions of this article:
Our proposed method automates the annotation process of specifying the skeleton's tip points, which significantly enhance the extraction efficiency and reduce the manual operation costs. Unlike skeletonization methods based on DNN, our proposed method does not require pretraining, which alleviates the annotation and training costs. We demonstrate that our methods can fully capture the deformation dynamics of soft bodies in a noninvasive manner, which could be effectively employed for designing the optimal sensor placement.
In this article, we first demonstrate that our framework can extract skeletal dynamics from dead fish “swimming” and brittle star movement videos. We also show that both the microscopic and macroscopic features of the animal motion are effectively reflected in the analysis. In addition, we verify the minimum number of sensors sufficient for fully grasping the state dynamics of a soft silicone rubber arm, a typical platform in soft robotics, from the video. Normally, to completely capture the deformation dynamics, a sufficient number of sensors should be embedded in the body. However, implanting sensors in the soft components often reduces its deformability and motion variety. We exhibit that our framework effectively offers a noninvasive indicator to design the sensor arrangement on a soft robot through the two demonstrations measuring the information-processing capacity and the reconstruction error of the actual sensor dynamics. Finally, we discuss the usefulness and future extension of our framework. Our software used in this study is open source and released on a website, which should be especially helpful for biologists and soft roboticists who wish to analyze the dynamic movement of soft continuum bodies.
Proposed Method
In this study, we propose an iterative skeletonizing framework for soft continuum bodies composed of the following three steps (Fig. 1A–C). The skeletonization process is automatically completed for all frames except the first one by extending the centerline estimation algorithm 36 based on the FMM algorithm. We explain the detailed algorithm of each step through a demonstration with a five-armed brittle star video (Fig. 1). Five skeletal curves should be extracted in this demonstration.

Detailed description of the algorithm. The algorithm has three steps. Each step processes data from left to right figure (i–iii).
Basal point estimation
First, one of the two endpoints of the skeletal curve is estimated (referred to as the basal point). Initially, the region of target object
Tip point estimation
Next, another endpoint of the skeletal curve is estimated (referred to as the tip point). First, the following speed vector field
where
This is called the eikonal equation, whose solution can be efficiently acquired by the FMM algorithm as with the calculation of the distance field. 36
After the calculation of
Skeletal curve extraction
Finally, the  distributed at regular intervals on the skeletal curve is extracted by connecting the basal point
distributed at regular intervals on the skeletal curve is extracted by connecting the basal point
The minimum cost path between  on the skeletal curve Ct. Note that
on the skeletal curve Ct. Note that
After the backtracking process, the smoothed point sequence  is obtained from point sequence Pt with the following smoothing algorithm:
is obtained from point sequence Pt with the following smoothing algorithm:

where K is a constant value adjusting the smoothing strength. Then, Qt is interpolated to construct a smoothed curve
Case Studies
In this section, we demonstrate the applications of our framework to biological and soft robotic data.
Analysis of biological data
First, we demonstrate the effectiveness of our framework by skeletonizing animal movement. We prepared a dead trout swimming video (published in Refs.,41,43 178 frames) as a simple task and extracted the spine dynamics. This video displays the ability of a dead fish body to swim upstream by employing the Karman vortices generated by a D-shaped obstacle. In this demonstration, we used the manually annotated time series data of the head position as the basal point dynamics
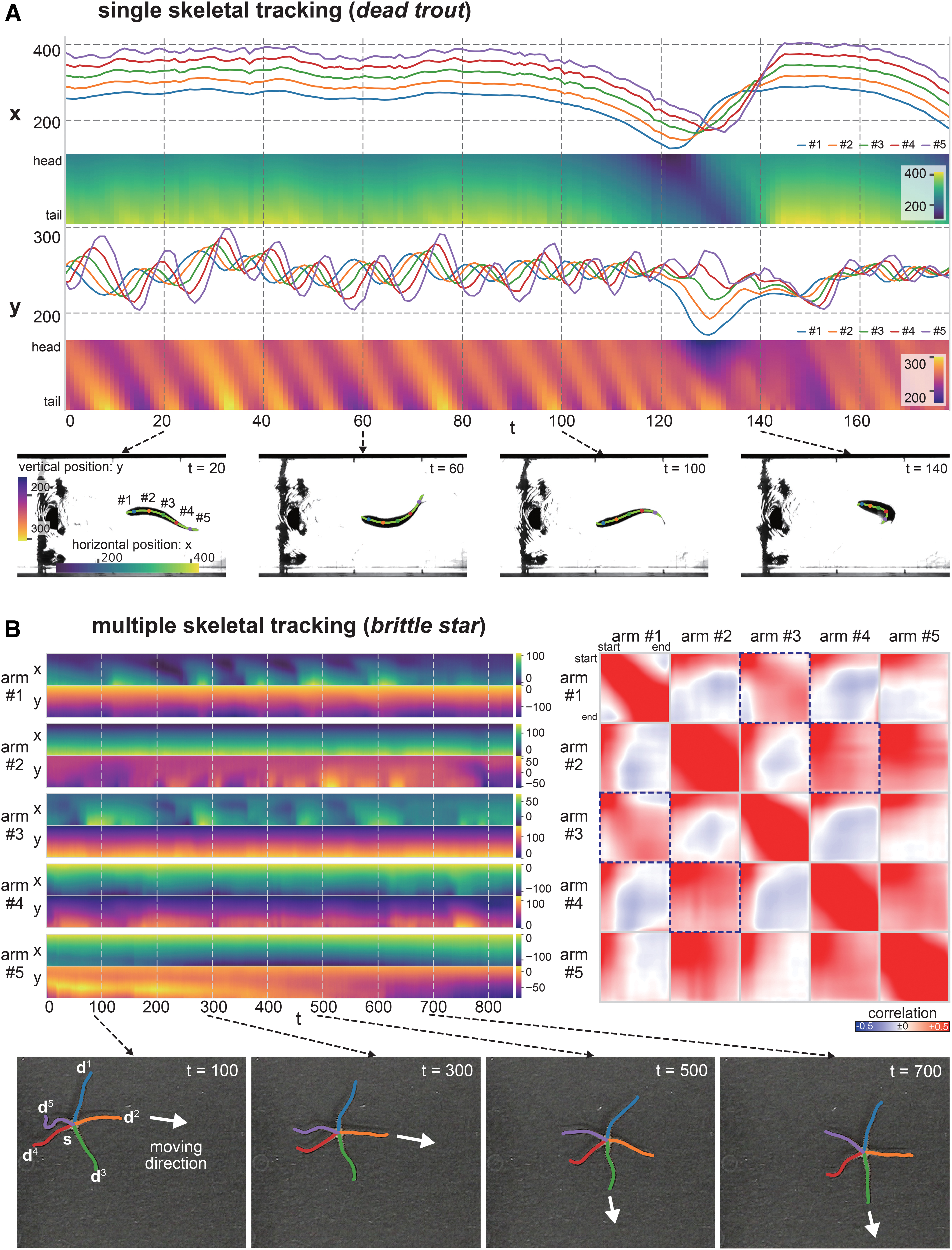
Demonstration of skeletal dynamics extraction.
Next, we exhibit that our framework can be applied to skeletonizing a multi-armed object. We prepared a five-armed brittle star (Ophiactis brachyaspis) video (published in Ref.,
42
843 frames). It was reported that brittle star randomly selects the leading arm opposite to one that is stimulated and has a tendency to move forward in the direction of the leading arm while synchronizing the bilateral arms adjacent to the leading arm.
42
Especially, there exist two candidate arms to be selected in response to the external stimulus in a five-armed brittle star. In the video, the tester provided a stimulus to the tip of arm #5 (purple). Then, the brittle star selected arm #2 (orange) as the leading arm until around the 500th frame, and arm #3 (green) after that. Figure 2B shows the relative coordinates dynamics (
Also, our proposed method can be used to skeletonize fuzzy soft body objects. We prepared a video recording the behavior of Hydra vulgaris, 44 whose body is semitransparent and thus generally hard to skeletonize. Our proposed method is, however, applicable to skeletonizing such a blurry body when the background is homogeneous since a simple binarization process can extract the semitransparent object (Supplementary Video S5). In this way, our proposed method can extract the object structure more robustly in a case where the background environment can be easily controlled (e.g., in a laboratory environment).
Designing sensory configuration for soft robotic arm
Next, we demonstrate that our framework offers a noninvasive indicator for designing the sensory configuration of a soft robot. Here, we prepared a movie recording of soft octopus arm movement (published in Refs.,15,46 36,321 frames). The soft octopus arm is a typical soft continuum robotic body in which a servomotor and 10 bend sensors are attached to a silicone rubber arm (Fig. 3A). A soft continuum arm is a commonly used platform in the field of soft robotics.13,14,47 Also, the soft octopus arm is a primary mechanical device for physical reservoir computing,5,6,48–53 where the complicated time series responses generated on the soft material are exploited for machine-learning tasks. In particular, the soft octopus arm converts binary motor commands

Soft octopus arm setup.
We prepared for 10,010 points of extracted skeletal dynamics Rt (
Figure 3C and D displays the skeletal dynamics
To evaluate the information-processing capability, we prepared a short-term memory task that measured the memory property for a random input signal. The short-term memory task requires system to reconstruct past input before n segments,
Since the logistic regression model has a minimal nonlinearity and no memory property, the task performance significantly reflects the degree of the computational capability of the system. Here, we introduced mutual information
Figure 4A depicts the performance function

Furthermore, we demonstrate that our framework can estimate the number of required sensors to extract deformation dynamics even without input information
where
Figure 4B displays the reconstruction error over
As with the case studies in the Analysis of Biological Data section skeletonizing biological data, our framework, of course, can be used to extract the skeletal dynamics of the other soft robotic systems, which offer useful information for control (see the Supplementary Video S7 skeletonizing a soft manipulator from a video published by Truby et al. 58 ). Also, 3D skeletal coordinates can be easily implemented with multiple videos from different viewpoints. We prepared a simple setup recording behavior of the soft octopus arm from two cameras arranged in the vertical direction and reconstructed the 3D arm dynamics (Supplementary Video S8 and Appendix). This 3D skeletonization would help estimate the posture of soft robotic systems.
Discussion
In this article, we proposed a framework for automatically extracting skeletal dynamics from video information of a soft continuum body. Since most of the annotation process are automated compared with the conventional methods, our framework can efficiently skeletonize soft continuum bodies. Also, the skeletal curve can be extracted with arbitrary accuracy by adjusting the tracking width and normalization parameter.
In the Analysis of Biological Data section, we exhibited that our framework efficiently extracted the skeletal dynamics from the video recording of animal movement. We showed that our framework can simultaneously extract multiple skeletal dynamics through a demonstration with a brittle star video. Also, we illustrated that our framework is applicable to analyze animal behavior. In the brittle star demonstration, for example, we demonstrated that the macroscopic arm movements of the five-armed brittle star were effectively reflected in the analysis with correlation matrices. We show that O. brachyaspis continuously switches the leading arm, which was neither quantitatively evaluated nor visualized in a previous study. 42 The extracted arm dynamics of H. vulgaris can be used to study the mechanism of the behavioral generation when it is analyzed with the imaged cell activity data 44 In this way, our framework is promising for studying animal behaviors.
In the Designing Sensory Configuration for Soft Robotic Arm section, we verified the minimum number of sensors sufficient for fully grasping the state dynamics by evaluating the information-processing capacity through the short-term memory task. We also demonstrated that the number of required sensors can be estimated without input information through the reconstruction of actual sensory dynamics. From the viewpoint of morphological computation, it is desirable to know the potential computational capacity of a body before deciding the sensor configuration.59–62 However, an implanted sensor often worsens a soft material's deformability, which limits the number of attachable sensors. Our framework can be employed to estimate the optimal sensor positions of soft robots in a noninvasive manner, which is helpful in the design of soft robot. For example, by optimizing the sensory placements to maximize a measurement called effective dimension, 63 we can reduce the redundant sensors and efficiently capture the internal state of the soft body with a limited number of sensors. Another possible scenario is that our framework can be used to estimate the minimum dimension to model the deformation dynamics of the soft body. Since the redundant sensors are wiped out by the optimization, the number of obtained optimal sensors would be related to the required dimension for modeling the soft body. To sum, our framework offers a useful indicator in designing soft robot setups.
Finally, we discuss the possible direction for extending our framework. The accuracy of our framework depends highly on the performance of the background subtraction algorithm. In this study, we prepared movies where the background and the object could be easily binarized by a single threshold value. It is, however, necessary to introduce advanced background subtraction algorithms such as Refs.64,65 especially when the background has a complicated pattern such as in a natural environment. Moreover, our framework cannot extract the skeleton of a soft continuum body overlapping on the image, limiting the scalability of our framework in the control of soft robots. To solve the problem, a 3D volume video should be used instead of a two-dimensional video. In particular, the FMM algorithm, a core algorithm in our framework, can be easily extended to a 3D volume image, which should be developed in future work.
Footnotes
Acknowledgments
We thank K. Tanaka and Y. Minami for providing the mechanical setups for our demonstration.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work was based on results obtained from a project commissioned by the New Energy and Industrial Technology Development Organization (NEDO). Katsuma Inoue was supported by JSPS KAKENHI grant number JP20J12815. Katsushi Kagaya was supported by JSPS KAKENHI grant numbers JP19H05330 and JP18K19336. Kohei Nakajima was supported by JSPS KAKENHI grant number JP18H05472.
Appendix
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.