
Abstract
Recent studies have been inspired by natural whiskers for a proposal of tactile sensing system to augment the sensory ability of autonomous robots. In this study, we propose a novel artificial soft whisker sensor that is not only flexible but also adapts and compensates for being trimmed or broken during operation. In this morphological compensation designed from an analytical model of the whisker, our sensing device actively adjusts its morphology to regain sensitivity close to that of its original form (before being broken). To serve this purpose, the body of the whisker comprises a silicon-rubber truncated cone with an air chamber inside as the medulla layer, which is inflated to achieve rigidity. A small strain gauge is attached to the outer wall of the chamber for recording strain variation upon contact of the whisker. The chamber wall is reinforced by two inextensible nylon fibers wound around it to ensure that morphology change occurs only in the measuring direction of the strain gauge by compressing or releasing pressurized air contained in the chamber. We investigated an analytical model for the regulation of whisker sensitivity by changing the chamber morphology. Experimental results showed good agreement with the numerical results of performance by an intact whisker in normal mode, as well as in compensation mode. Finally, adaptive functionality was tested in two separate scenarios for thorough evaluation: (1) A short whisker (65 mm) compensating for a longer one (70 mm), combined with a special case (self-compensation), and (2) vice versa. Preliminary results showed good feasibility of the idea and efficiency of the analytical model in the compensation process, in which the compensator in the typical scenario performed with 20.385% average compensation error. Implementation of the concept in the present study fulfills the concept of morphological computation in soft robotics and paves the way toward accomplishment of an active sensing system that overcomes a critical event (broken whisker) based on optimized morphological compensation.
Introduction
Due to frequent burrowing and inhabiting in dark narrow spaces, rats elaborately control their muscular whiskers to make rhythmic back-and-forth swing for environment exploration. 1 Whisker-obstacle contacts cause the whisker to bend stimulating mechanoreceptive neurons in follicle complex. 2 Many scientists in biology and psychology have been inspired by how rodents utilize tactile sensation to accomplish tasks, including localization 3 and texture discrimination. 4 In addition, constructing a biomimetic whisker-based sensor could facilitate not only research of natural behavior in rodent sensing but also a proposal of bioinspired solutions for sensing capability in mobile robots, especially ones operating in complex and dangerous terrains that are inaccessible for humans such as collapsed tunnel, building or rooms filled with gas or smoke, and so on.
Recently, autonomous robots have been a focus of the engineering and research community for their ability to operate independently in unstable and hazardous conditions. 5 To achieve this ability, sensory systems of robots require both competencies in sensing ability and flexibility in responding to contingencies. However, adaptability of sensing components had not been considered as a crucial feature, especially for artificial vibrissa systems whose whisker tips are frequently eroded, trimmed, or broken (Fig. 1). To deal with such events (e.g., broken sensor whiskers), autonomous robots normally have to stop their operation, then be manually repaired or replace the broken sensing components. To overcome this limitation, effort must be paid to on-site solutions, especially development of control algorithms that can counter problems of broken components at high levels of uncertainty. 6

Illustration of the proposed whisker sensory system that was integrated into a mobile robot. This whisker can actively change the morphology of the integrated chamber upon pressurization to adapt to the critical circumstance of its morphology (being trimmed, broken, or partly damaged) during operation.
In this article, we suggest an approach that utilizes a morphological computation technique, which can be referred in Pfeifer and Gómez, 7 to offload the complexity of the control system and take over the adaptive function. Inspired by how rodents adjust the capacity arrangement of “barrels” in their primary somatosensory cortex in adaption to broken whisker, and the dependence of mechanical properties on the medulla layer of the whisker, 1 we introduce an intriguing prototype of a soft artificial whisker sensor that can actively vary its sensitivity with change in chamber morphology (similar to the medulla layer), changing the chamber morphology, including geometrical and mechanical specs such as shape and softness, as illustrated in Figure 1A.
The ultimate goal is to enable autonomous robots to maintain sensibility despite a broken sensory system and remain functioning until the next maintenance. To support this idea, the morphology of the inner chamber of the whisker is actuated by pressurized air to change the tension of the outermost layer where a strain gauge is bonded as a receptor. Although there are no sensing receptors on the outer surface of a rodent's whisker, there are many reports of insect antennae with sensing components along their length. 8 On top of that, as far as the authors know, no study has previously used the rodent ability to compensate for a trimmed bio-whisker in a robotic system. Our study demonstrates the advantage of soft materials over rigid materials for artificial whiskers and the importance of researching the influence of whisker morphology in tactile perception.
Related Works
Bioinspired active vibrissal sensor in robotics
Haptic sensing through touch offers enormous potential to robots in assessing their surrounding environment, including interaction with human beings. There has been a great deal of research regarding proposals of new tactile sensing systems based on a variety of touch phenomena. Vibrissa sensory systems are typical examples that were inspired by the tactile discriminatory abilities of natural animals.
The first implementation by Russell and Wijaya 9 involved a continuum rigid wire to extract contact location, shape, and contour information regarding a target object through contact interaction. Tactile responses were collected by a simple mechanical system comprising a servo-potentiometer and springs. In the following years, a series of studies focused on the application of biomimetic whiskers in robotics. Kaneko et al. 10 established the first idea of investigating the correlation between the curvature of a flexible wire and tactile information. The term rotational compliance introduced in this work was also used as a fundamental hypothesis to explain how rats convert perceptible mechanical signals received during the sensing process into perceivable tactile information. 11 Ahn and Kim 12 proposed another example of a bio-whisker system integrated into the Koala robot platform. A Hall-effect magnetic sensor was used to measure the protraction angle to detect contact location, as well as the texture of the object. Researchers in Emnett et al. 2 designed an artificial follicle containing four pairs of strain gauges that functioned as mechanoreceptors at the follicle-sinus complex. By collecting and analyzing a set of three different mechanical components related to bending moments and axial force along the length of the whisker, the location of the whisker-object contact point in three-dimension working space could be determined. Anderson et al. 13 suggested an efficient solution to the problem of discriminating sensory responses caused by self-active movement based on the SCRATCHbot robotic platform. More recently, TacWhiskers were proposed in Lepora et al., 14 in which a vision-based vibrissal sensor utilizes a camera to capture the deformation of inner nodular pins upon interactions with obstacles. Besides inspiration from land mammals, systems inspired by whiskers of aquatic animals have been proposed such as flow-whisker sensor. 15 One system mimicked the seal's hunting ability of using its whiskers to track vortices left by moving prey. 16 A similar effort inspired by seal whiskers was introduced by Zhu et al., 17 which was able to work on the land (exploring an obstacle and its surface), as well as underwater (detecting water flow direction and velocity).
In general, most of these whisker sensors focus on embedding sensing components into the base, similar to the follicle-sinus complex in mammals, where external impacts along the length are transferred to the base.2,18 Such models were considered efficient copies of rodent's natural behavior in environment exploration and were proven successful in performance of sensing and navigation tasks by robotic systems. Nevertheless, consideration of systems that can adapt to change the mechanical properties (elasticity, stiffness, moment of inertia) with variation in geometry of the whisker is still limited. The novelty of our study lies in the intriguing inspiration from bio-whisker's structure analysis and plasticity in the neural circuits to create advantageous adaptability for the artificial whisker sensory system.
Morphological computation and soft active tactile sensing
Morphological computation is a method that exploits the structure, material characteristics, and dynamics of a flexible body during interaction with its environment and thus outsources relevant computational function to the “body” rather than assign it to “central nervous system.” 19 This concept has been widely applied to the design of bioinspired robots and related applications, especially in soft robotics. Hauser et al. 20 exploited static feedback generated from a muscle-skeleton system (equivalent to a mass-spring system) to generate periodic locomotion. Nakajima et al. 21 proposed a soft arm inspired by the octopus and demonstrated that the high-dimensional nonlinearity system could be partially emulated using the dynamics of a physical body.
Recently, the demand for improving the interaction of robots with humans and the surrounding environments has been growing. Since soft-bodied robots are inherently soft and deformable, it is expected that they can not only efficiently accommodate their environment but also actively change their own morphology to realize various sensing tasks. For example, Ho et al. 22 introduced a simple active sensing platform Wrin'Tac, which mimicked water-induced wrinkles on a human finger by extended periods in a wet environment. They argued that changing morphology of the contact surface would give benefit in varying the stimuli perceived from the environment and allow the agent to actively select the sensing modality. Similarly, Qi et al., 23 also inspired by human wrinkles, addressed the idea of forming wrinkles to localize the sliding movement on a soft path, as well as discriminate a surface profile. Further research highlighted the potential of using embodiment to explain the behavior of a robot 24 and gave some clues to understand theoretically how an organ's morphology defines the agent's behavior.
Regarding the whisker sensor, most recent studies have used steel or aluminum wires to fabricate such devices. However, such materials may experience unexpected oscillation of the whole structure during strong external interactions. Moreover, there is little work considering the medulla layer, which plays an important role in the mechanical properties of the vibrissae,25,26 in designing robotic whiskers. In this study, we propose a design of soft whisker sensor with novel inclusion of the medulla layer, which plays a crucial role in variation of whisker sensitivity upon morphological change. The main contributions of this article can be summarized as follows:
Proposal of a novel structure sensory system mimicking the geometry of a rodent whisker with the ability to compensate if broken/trimmed or eroded during operation. Construction of a detailed analytical model to describe and compute morphological deformation. Through this model, we can predict the required chamber morphology for the compensation process, namely a morphological compensation strategy. A suggestion of a new platform for soft tactile sensing systems that can actively change its morphology to facilitate desired responses.
Idea and Fabrication of Soft Whisker Sensing System
Idea
Mammalian vibrissae are of interest not only to biologists but also to neuroscientists, thanks to their exquisite features. In this landscape, a question that arises is: How does a rodent cope when a whisker is trimmed? Many studies in biology and neuroscience have tackled this question and characterized the contribution of whiskers to sensorimotor development by trimming collective whiskers of rats and observing their behavioral adjustments, 27 as well as the structural dynamics of neocortical neurons when those rats grew up. 28 Holtmaat and Svoboda 29 reported a noticed phenomenon which demonstrated how a rodent's central nervous system (i.e., brain) adapts to a broken whisker by adjusting neural region (known as the barrel cortex), where sensory signals are transferred from the snout so that the broken whisker (with decreased sensitivity) would be functionally replaced by its neighboring intact whiskers that appear to be more sensitive as compensators. In short, rodents compensation mechanism of tactile sensing is accomplished at the central nervous system as illustrated in Figure 2A.
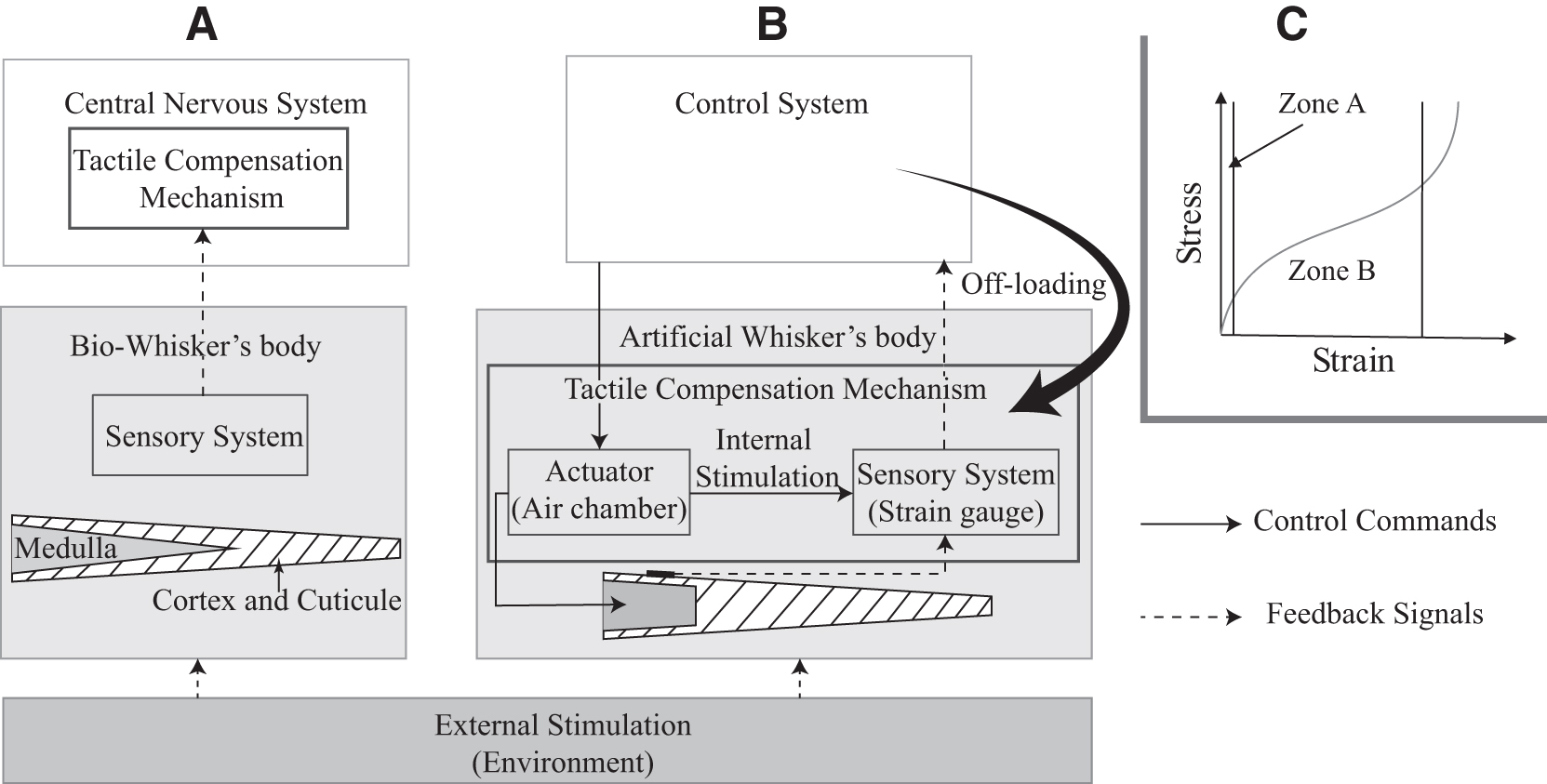
Assuming that such mechanism was implemented in a robotic system, the control system integrated with data-based learning techniques should be exploited to address the scenario of losing tactile information due to broken structure. However, this implementation generally requests the controller to share its limited resources for computation tasks when the whisker was broken (Fig. 2A). To reduce such computation burden in biomimetic system, in this study, we approached differently by assigning the adaption process from the central system to the whisker's body (i.e., the chamber) itself as inspired by the proposal of morphological computation. 19 More specifically, as demonstrated in Figure 2B, actively actuating the air chamber is expected to change not only the whisker's geometry but also its mechanical characteristic. By doing so, the sensitivity of the sensing element (i.e., strain gauge) could be controlled in the way of compensating for incorrect tactile signals during interaction with the surrounding environment. In addition, it allows the decentralization of the control system from the central (brain) to the local one (body), thus ideally reducing computation burden at central level.
In terms of the whisker body, the internal structure plays a critical role in transferring tactile signals to mechanoreceptors. According to Lucianna et al., 1 a bio-whisker has three separate layers: cortex, cuticle, and medulla (Fig. 2A, B), in which the medulla layer, which tapers from the base toward the tip, is the softest layer of the whisker. This suggests that a whisker could produce different levels of elasticity as reflected in Young's modulus E (explained in the next section) by reshaping the medulla layer, such that perceived signals induced by an external contact would be adjusted as expected due to the heterogeneous structure. The design of a proposed artificial whisker based on this hypothesis is introduced in the following sections.
Although the concept of “compensation” in nature varies among species, it is worthwhile investigating this function in a robotic device. As suggested by Solomon and Hartmann,
30
the contact distance is generalized for any whisker by following equation:
Silicon-rubber characterization
Thanks to the softness of silicon rubber, the morphology of a soft structure is actively changed by the integration of a simple pneumatic actuator. It is worth noting that the response of a soft material to stress highly depends on the applied strain, and the stress–strain relationship may vary significantly as illustrated in Figure 2C. More importantly, the linear theory of elasticity is only valid for a very small deformation that corresponds to zone A of the stress–strain curve, which obeys Hooke's law, and is characterized by a constant Young's modulus. As stress increases slowly with high deformation in zone B, it is expected that the applied Young's modulus in this region reduces, which may result in a change of the soft body morphology. This characteristic is applied in our method to achieve the changeable morphology of an artificial whisker.
Design and fabrication of artificial whisker
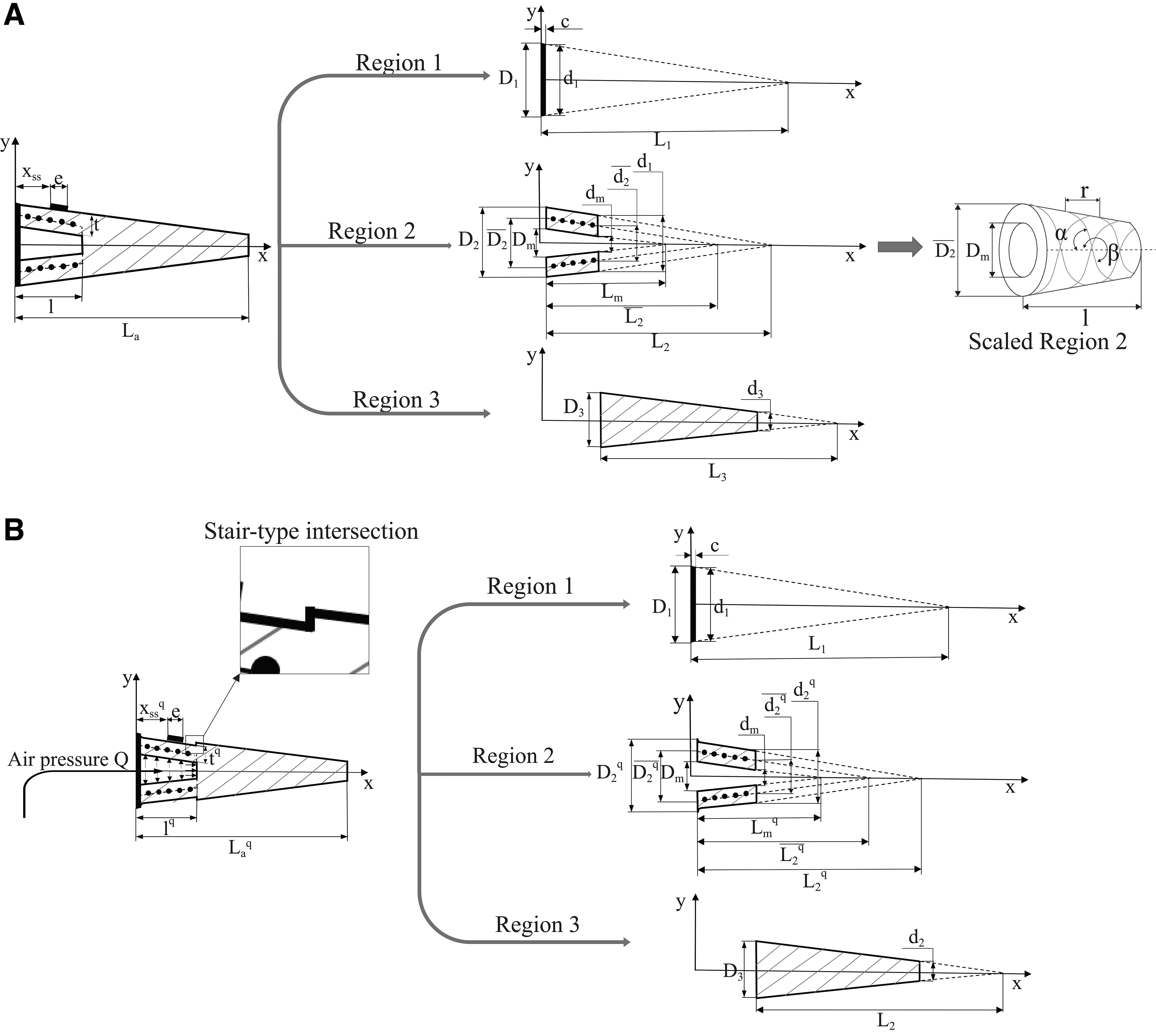
To achieve the soft changeable morphology in our device, we replicated the shape of a linearly-tapered natural whisker using silicon rubber and introduced a unique occurrence of the medulla chamber inside the whisker as illustrated in Figure 2B. The proposed whisker was divided into three separate regions to facilitate construction of the analytical model: cap (region 1), chamber (region 2), and whisker body (region 3) (Fig. 3). First, the chamber (region 2) is tapered at an equivalent degree of taper as the outer layer, that is,
The design and dimensions of the artificial whisker for each region:
Artificial Whisker Parameters (Fig. 3)
The fabrication procedure is summarized in Figure 4A. We used silicone-rubber Dragon Skin 00-30 (Smooth-on, Inc., PA) to make the soft whisker body. Molds were designed using 3D-CAD software (SolidWorks) and fabricated in a 3D printer (Zortrax M200; Zortrax, Olsztyn, Poland). Two different sets of core molds were used in sequence due to the complicated design. First, core molds of set I were used to form the double-helical trench to make ease for wrapping the inextensible fibers in the next step. Then, set II was used to obtain all the dimensions of the outer layer as designed in Table 1. Both sets shared the same medulla mold, which was not removed until finishing step 3. The model was then set on a cap mold with a cylindrical air hose (outer diameter 2 mm), and a thin layer of Dragon skin 30 was used to create the cap. Finally, a strain gauge was bonded by glue at the designate site

Analytical Model for Normal and Compensation Mode
As aforementioned, a typical whisker-like sensing system accomplished various tactile exploration tasks that happened on the whisker length. However, in the present study, we particularly focused on contact localization ability, that is, specifying where contact occurs along the body of the whisker. Therefore, we aimed to propose an analytical solution to tackle this issue, as well as a platform for a morphological compensation strategy. For the sake of simplicity, the following assumptions were made:
All possible interactions will be assumed to exert only in region 3 of the whisker body to minimize estimation error due to high rotational stiffness. In practice, this hypothesis is biologically relevant to the fact that rats tend to make whisker-environment collisions near the tip to avoid the increasing spike rate of some cells in follicle when contact is close to the snout. 32
Lateral slip at the contact location is neglected.
Deformation of the whisker is within the measurable range and principle measuring plane of the strain gauge.
A single-point contact is solely considered.
Normal mode
We attempted to construct a model for prediction of the strain gauge output upon contact with the external environment, which depends on the geometry, location of applied force, and deformation of the proposed whisker. Especially, the correlation between the morphology of the whisker model and the medulla chamber is of particular interest with an intrinsic effect on the response of the sensor system. Therefore, an effective analytical model was not only necessary to assess our idea but also applicable for operation in a robotic system.
When the whisker encounters an obstacle, the contact force exerted at a location along the body generates a bending moment as illustrated in Figure 4B. We focused on expressing the ratio of the interpreted tactile signal (or the mechanical strain) to whisker deflection at the contact point. This approach is one of two fundamentally different methods for performing tactile perception extraction used by Refs.10,12 However, such effort used classical beam theory Euler–Bernoulli, which is only applicable for a beam that has a homogeneous cross section and material property (Young's modulus). As a result, for our nonuniform whisker design, we used Castigliano's theorem
33
that relates to strain energy generated at each section of the whisker body. In short, by assessing the strain energy stored in a soft structure during its deformation, the displacement of the contact point is identified. First, the principle of conservation of energy is given by:
where U denotes the strain energy, Wi is total work done by internal forces,

where
Then, the generalized formulation of
According to Castigliano's theorem, displacement
In normal mode, Young's modulus is constant for the whole whisker's body
where


Consequently, Equation (8) denotes the dependence of contact deflection
Hooke's law is applied to construct the relationship between bending stress
where y is radius of the outermost layer of the chamber's wall where the strain is measured:
Let us substitute y,
where
Combining Equations (9) and (15) yields:
Equation (17) implies that the tactile signal in the form of mechanical strain relies on the geometry, the location of the stimuli source, and the deformation of the whisker (candidates for contact force P and Young's modulus E). Validation of the above model was examined by experimental results discussed later.
Compensation mode
The proposed whisker is able to use the compensation mode when it was trimmed or broken along its body. In this mode, the air pressure inside the medulla chamber is varied, bringing change in chamber morphology, which results in an adjustable output of the strain gauge (attached to the chamber outside wall). For the accomplishment of this purpose, the analytical model must predict outputs of the sensing element (strain gauge) for different dimensions of chamber morphology (Fig. 3B). Let us introduce variable
Possible deformation upon pressurization of the chamber was assumed to be in region 2. As a result, the morphology of region 1 and region 3 remains unchanged under any pressure value. Extension in the length of region 2 may only be caused by pressure force Q (represented by black arrows in Fig. 4C) in the x-direction because of reinforced fibers.
The diameter at each end of the chamber does not change during air pressurization. Region 2, in general, and the chamber, in particular, remain linear-tapered upon pressurization.
The intersection of region 2 and region 3 was stair-like type as illustrated in Figure 3B, instead of a fillet shoulder.
Thickness tq, corresponding to the pressure Q in the chamber, was considered to remain a linear distribution across region 2. Thus, tq is calculated as the average value of thickness at two arbitrary cross-sectional areas near two ends of region 2 [we chose
The estimation equation for
Poisson's ratio of a typical silicone-rubber material was estimated in a tension experiment as approximately equal to 0.534; in this study, we chose the value of 0.49. Then, thickness tq applying along region 2 is calculated as:
where
in which F is an internal force generated on the cross-sectional area at x (indicated by red arrows in Fig. 4C) with area
Rewriting Equation (16), we obtained following relation:
By the combination of above-derived equations, relation of
Consequently, Table 2 shows all changed parameters for reconstructing the original analytical model introduced in the previous section and their new approximation equations. Otherwise, as discussed in Silicon-Rubber Characterization section, Young's modulus of region 2 (E2) is expected to vary corresponding to the change in chamber morphology with pressurization. Hereafter, this variation is described by variable k2 with the following relation:
Reidentification of Whisker's Structure


as well as Equation (15):

where:
Finally, the final equation to compute the numerical strain in the compensation mode is:
Experimental Results
Experiment design
To evaluate the reliability of the proposed sensing system, an experimental setup was designed as illustrated in Figure 5. It comprised an artificial whisker and an obstacle (with a rigid sharp edge), fixed onto two linear motorized stages (PG750-L05AG-UA; Suruga Seiki, Japan) perpendicular to each other. They were driven precisely at a resolution of 2 μm by a stepping motor controller (DS102; Suruga). The X linear stage was used to ensure that the contact was exerted at the desired distance from the base, whereas the Y linear stage drove the obstacle back and forth for expected deflection with velocity

Experimental setup.
To acquire information on pressure value and axial deformation of the chamber in the compensation mode, a digital pressure sensor ISE20A-R-M (SMC Co., Japan) and an analog laser sensor IL-030 integrated with amplifier IL-1050 (Keyence Co., Japan) were used. The sensor head of the laser was fixed in a mounting bracket so that the laser light from the transmitter was coincident to the centerline of the whisker. Moreover, to ensure that the laser light absorption or excessive reflection did not affect the measurement, a black layer of silicone covered the free end of the whisker. All analog signals from these devices were recorded by a microprocessor (Arduino MEGA 2560) and transmitted to the computer. Finally, MATLAB R2019a was used for data analysis.
Procedure for Young's modulus estimation
In this section, a static test to observe the variation of the material property of region 2 (E2) under increased air pressure in the chamber was conducted. In detail, we evaluated the response of the strain gauge generated by expansion in the x-direction of the chamber to compute the value of k2 (
where
We regulated pressure Q within the range

Variation of material characteristics with respect to a range of pressure Q:
In conclusion, the results prove our concept that variation of the inner pressure would lead to morphological change (including softness and shape) of the whisker, as well as the response of the strain gauge. This was exploited to implement the broken whisker compensation strategy in the next section.
Validation of the analytical model
In this section, we report an experimental method for validation of the proposed analytical model for two modes (normal and compensation) and demonstration of the feasibility of using the model to predict an appropriate chamber morphology for the compensation process (of a broken whisker). Measurement of the strain gauge response with different value of pressure in the chamber (
First, we validated the proposed model for the normal mode (

Numerical solution versus experimental result in normal mode (
Regarding the model in the compensation mode, a similar procedure was applied with different values of compressed air Q in the chamber, and the results are presented for the entire range of contact location and deflection (Fig. 8). At first glance, both graphs share a similar trend compared to the normal mode results in Figure 7, which highlights an increase in strain amplitude with pressure Q increase under the same interaction conditions (location and deflection). It can be explained by Figure 6B where the value of

Numerical solution versus experimental result in the compensation mode: The gradient of the strain output gets higher as the input of air pressure increases.
In the next section, two case studies are examined which could emulate the compensation process inspired by rodents and demonstrate the applicability of the proposed whisker sensor to a robotic system for clarification of the efficiency of the analytical model.
Compensation experiment
In this section, two study cases regarding a broken whisker compensated by its neighboring shorter whisker (Case 1), as well as longer whisker (Case 2), are introduced in evaluation of the suggested compensation strategy for broken whiskers. While these cases are inspired by the natural behaviors of rodents, another subcase of Case 1, which is more appropriate for a robotic system, is also investigated:
Case 1: A short whisker compensates for a neighboring long whisker. In this case, the experimental prototype 2 (65 mm in length, Fig. 5B) plays the role of compensator, and the prototype 1 (70 mm in length) plays the role of target. This also includes a subcase when a broken whisker (the short one) compensates for itself after being trimmed from its original (long) state.
Case 2: A long whisker compensates for a neighboring broken (shorter) whisker. In this case, the experimental prototype 1 (70 mm in length, Fig. 5B) plays a role of compensator, and the prototype 2 (65 mm in length) plays a role of target.
The compensation technique is based on the proposed analytical model for calculation of an appropriate value of chamber pressure Q so that the updated sensitivity of the compensator is close to that of the target one. The experiment procedure can be summarized in the following steps:
First, we selected the initial air pressure
Second, from the analytical model for the compensation mode in Compensation Mode section, to obtain at the similar response of the strain gauge for the compensator and target (i.e.,
In this evaluation, we chose the input of contact location
Third, we substituted the value of k2 from the previous step to the relation equation between k2 and pressure Q to determine the necessary amount of air to be compressed into the chamber.
Finally, the strain gauge output was recorded under different interaction conditions [

Compensation test results. Graphs in
Case 1
In this scenario, the compensator (prototype 2) attempted to adjust its sensitivity (i.e., change pressure value Q) to match that of the target whisker (prototype 1). Substituting the required variables to solve Equation (34) reveals that the desired value of air pressure is
Case 2
In this case, the compensator (length
In conclusion, by evaluation of two showcases on morphological compensation, despite a small difference among calculated and experimental values, the proposed whisker could actively adjust its sensitivity to match sensing performance of itself (or a neighboring whisker) when the body length shortened (trimmed or broken). At the same time, the proposed whisker design and compensation strategy can be exploited to develop active robotic whiskers that can actively change their sensitivity to match various sensing tasks or even to compensate itself when it is accidentally broken.
Discussion
Artificial whisker design with changeable morphology
The design of our artificial whisker was inspired by the structure of a rodent whisker but has some differences. The performance of the sensing element (strain gauge) is highly dependent on the morphology of the chamber layer, which differs from a natural whisker in proportion (as illustrated in Fig. 2A, B). In detail, the conical-shaped medulla of a natural whisker extends further toward the tip than the chamber in our artificial whisker, which provides different levels of elasticity. Generally, we kept the chamber's length at around
In contrast, the precision of the morphology analysis relies on the stable expansion of the chamber in the direction of measurement by the strain gauge, thanks to the reinforcement fiber. However, in experimental trials, a slight bend of the chamber was observed at high inner pressure. Due to this observation, the resulting strain output shown in Figure 6A may include not only pure axial translation. However, this may little affect whisker performance as long as the screw pitch r (Fig. 3A) of the helical path is sufficiently small. In addition, we ignored any possible impact of the nylon fiber in the analytical model and evaluation test of the material characteristics, even though they were assembled without twisting or tightening.
Applicability: haptic sensing system for autonomous robots
A changeable morphology whisker is considered appropriate for embodied intelligence 20 and behavior adaptivity. Our aim was to provide an efficient solution to active sensing, which allows us to actively reconfigure the sensing components to fulfill specific purposes or adapt to critical uncertainty (e.g., partly-broken state). In this discussion, we recommend two types of application configurations for our whisker-based system.
Type 1: an array of whiskers
An array of whiskers is capable of tactile exploration since all whisker tips lie in a plane such that an obstacle will be swept over by multiple whiskers to obtain rich information. This case deploys the biological compensation procedure discussed in Idea section, which is summarized as follows: the broken whisker will be completely and functionally replaced by its neighboring whiskers in an array of whiskers. Furthermore, whiskers in this system would require the ability to compensate for either longer (Case 1) or shorter (Case 2), which was validated by two experiment cases in Compensation Experiment section. Hence, stability is highly required for both working states. We will demonstrate how this configuration hardly meets such criteria in the next section.
Type 2: a single whisker
For a sole whisker system (or more than one located independently), to deal with unexpected situations (e.g., broken or trimmed whisker), it needs to be able to self-calibrate its performance. The experimental results, discussed in the previous section (Fig. 9B), demonstrate the potential of our whisker system for such application. Obviously, only air decompression is sufficient in this case. Nevertheless, the robot must be able to acquire feedback about the new configuration of the whisker after trimming to select an appropriate chamber morphology for exact compensation. This feature will be further examined in the next study. Furthermore, along with the investigation of sensing ability, we target this sensing device as a new communication protocol that a mobile robot can use to send a message to their allies in a swarm through touching, whereas the content of the message depends on the morphology of the chamber.
Reliability of the analysis model
In this article, a numerical model of strain energy stored in each section of an artificial whisker body was introduced to analyze the consequences of morphology change if its internal chamber is changed. The convenience of this approach lies in the independent expression of the material characteristic for each region, which is significantly important for the nonuniform structure proposed in this study. Nevertheless, due to the fact that the inherent relationship between the actuation and the morphological (including geometrical and material) properties was approximated (by equations as introduced in Analytical Model for Normal and Compensation Mode and Experimental Results sections), we might be unable to obtain an explicit solution for Equation (34). Among those equations, the expression of the second moment of cross-section area for region 2, which is approximated by Equation (6), is considered to be a major factor. We compared the approximated expression
In contrast, quasi-static tests to observe responses of the embedded sensing element under different contact conditions were conducted with a wide range of chamber morphology. Comparison results in Procedure for Young's Modulus Estimation and Validation of the Analytical Model sections show consistency with the hypothesis we made at the beginning of this study. The first agreement is related to the decreasing trend of Young's modulus E2 when the air pressure in the chamber increases (as illustrated in Fig. 6B), which conforms to the stress–strain curve (Fig. 2C). The second agreement is that the experimental results of the analytical model could predict the overall performance of the system. Thus, the model could be utilized to serve as a brain to actively control the whisker body depending on various tasks such as adaptive functions.
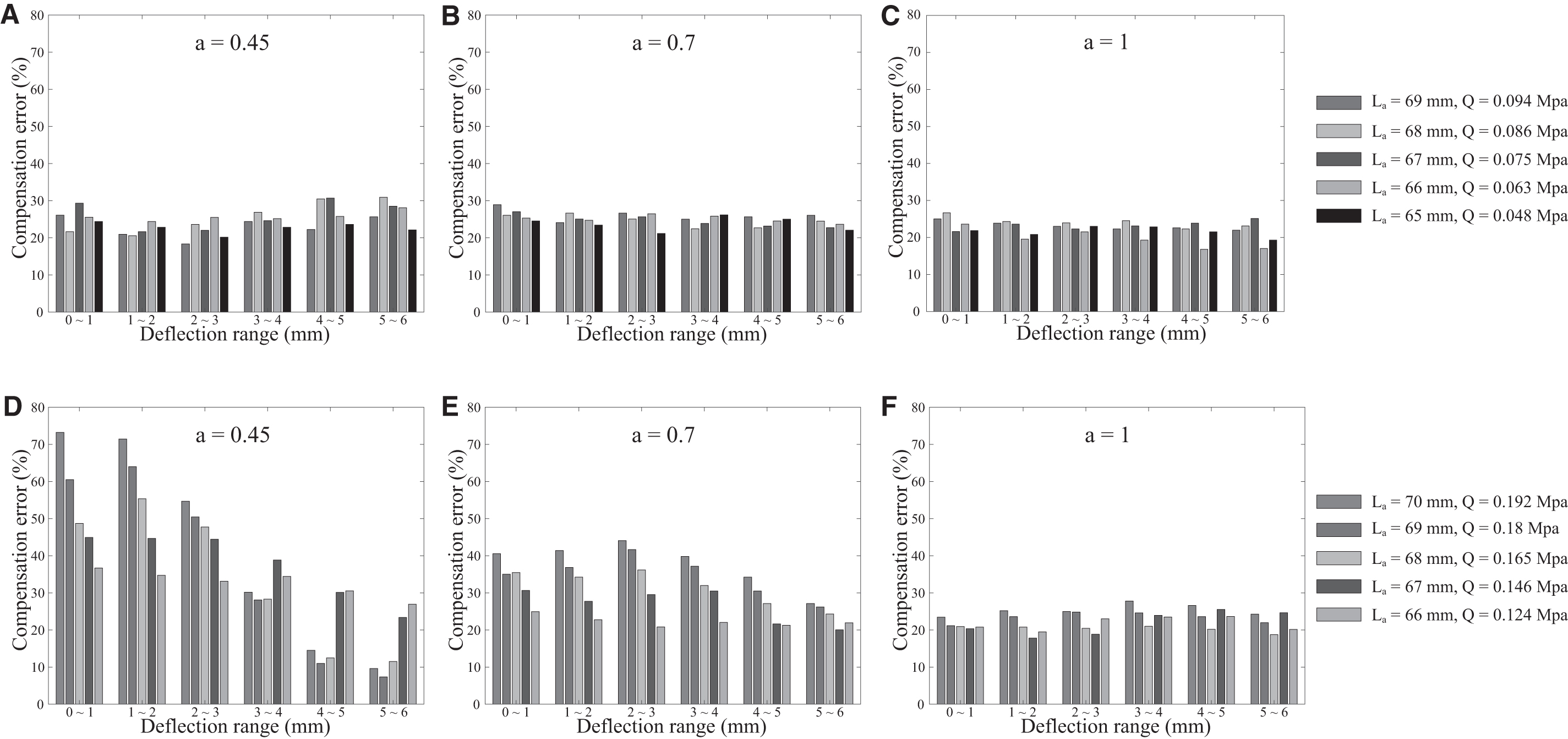
Although the performance of the whisker prototypes in compensation mode (Fig. 9) tended to agree with the hypothesis, some challenges still remain. Some errors in the measurement data may have arisen during analog-to-digital conversion by the microprocessor system or the proposed analytical model itself does not fully consider all potential factors affecting system performance. For overall evaluation, we examined how the parameters of actual length La and air pressure Q influenced the compensator performance in the compensation mode. Moreover, we evaluated how accuracy of the proposed model changed in compensation mode, when the whisker was trimmed at different locations. An experimental procedure similar to that introduced in Compensation Experiment section was conducted on the compensator whisker with the length varied from 65 to 69 mm in Case 1 and 66 mm to 70 mm in Case 2. Under each condition of trimmed whisker, the desired inner pressure Q was estimated from the model and applied to the chamber. Then, the difference between the strain signal of compensator whisker and its target one after implementing the compensation was computed through Equation (35).
where
Figure 10 compares the average compensation error with respect to a specific range of deflection at three different contact locations, that is, the contact location ratio a was varied from 0.45 (contact location is near the tip of the chamber), 0.7 (contact location is near the center of the trimmed whisker), and 1 (contact location is at the tip of the trimmed whisker). Generally, the error of Case 1 (Fig. 10A–C) was rather consistent under most conditions of length and pressure and smaller than most conditions of error of Case 2 (Fig. 10D–F), especially when contact occurred near the tip of the chamber (i.e.,
Compensation error analysis for Case 1
Figure 10D illustrates that, at the early stage of whisker bending (very small deflection), the larger the value of the chamber inner pressure, the larger the compensation error. This can be explained by the fact that at high pressure, the chamber is stretched resulting in a significant increase of tension of the chamber wall, which requires greater contact force even with small deflection. As a result, the outer surface of region 2 experienced a local deformation at the interacted region, leading to an amount of strain output absorbed.
Whereas, at higher deflection ranges, the bending stress increases enormously producing larger mechanical strain output complying with the stress–strain curve in Figure 2C. Thus, the compensation error decreases dramatically which can be observed more clearly for the high-pressure cases (e.g., blue and orange columns). As can be seen from Figure 10E and F, the influence of such factors described above was no longer significant due to the inversely proportional relation between contact location and contact force.
For other cases (Fig. 10A–C), the results were consistent with the above arguments. Generally, the greatest error occurred with contact close to the base (
According to above investigation, we conclude that, with the morphology of the artificial whisker suggested by the analytical model, the compensator in Case 1 accomplished the compensation task with more stability and lower overall average error (
Affecting factors of compensable range
In the proposed whisker sensory system, the largest compensable range of a shortened whisker is considered as a fundamental feature of the compensation ability. This feature is also understood as the maximum and minimum level of tactile perception that a whisker can actively adjust to accomplish compensation tasks with an acceptable accuracy rate. According to the compensation principle clarified in Idea and Analytical Model for Normal and Compensation Mode sections, this range is strongly dependent on the morphological transformation of the chamber. In this study, we tested two scenarios (Compensation Experiment section) with trimmed length up to 5 mm. However, it should be noted that the proposed compensation process also works for a wider range. To tackle this issue, the value of the initial air pressure Qi (i = 1, 2) assigned in the experiment Compensation Experiment section need to be altered to 0.2 MPa for Case 1 and 0 MPa for Case 2, respectively. As a result, the changeable range of air pressure inside the chamber, which is proportional to the morphological transformation level, will be increased accordingly.
Nevertheless, increasing the adjustable range of the compressed air inside the chamber to claim a better compensation range is not always advantageous due to a higher resulted compensation error (as pointed out in Reliability of the Analysis Model section). Furthermore, in such attempt, the air regulating system needs a more power-consuming and bulkier compressor, which is not suitable especially for a small-scale robotic system. An alternative approach is to optimize the geometrical variables of the whisker body especially the chamber such as the chamber length l, the thickness t, and outer diameters of each region (Fig. 3) to achieve the maximum compensable range (upon application's demand) with a small value of compressed air. Since such approach requires more thorough investigation on the correlation among influencing elements to the compensation range, it remains in our future work as a comprehensive fulfillment of the idea of morphology-based tactile compensation.
Conclusion
The novelty of this artificial vibrissa sensing device is the variable morphology of the medulla-like chamber actively controlled by an external pneumatic actuator to accomplish the recalibration task for the tactile perception of a broken or trimmed whisker. In the compensation mode, all potentially deformable parameters were considered in the analytical model and estimated with respect to the inner pressure of the chamber. In addition, various experiments confirmed that the material characteristic reflected in the term Young's modulus E was strongly dependent on the morphology of the chamber. This indicates that the sensitivity of the sensing element (strain gauge) can be controlled using the analytical model. In addition, the feasibility and variability of the proposed device were investigated through two separate experimental cases, in which Case 1 (a short whisker compensating for a longer one or self-compensation) outperformed its counterpart with only
In future work, we will explore new methods to optimize the design and increase its precision rate. The analytical model based on the morphological computation technique will be investigated more thoroughly to exploit this idea for other applications such as a failure warning system. In addition, the efficiency of this sensory system will be verified by integrating it into a robotic system.
Footnotes
Acknowledgment
The authors thank Mr. Le Dinh Minh Nhat for his support in setting up the data acquisition system.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work was partially supported by the Doctoral Research Fellowship of JAIST and partially by JSPS Grant-in-aid for Scientific Research KAKENHI number 18H01406.