
Abstract
Hand exoskeletons are primarily designed for hand-impaired individuals to grasp objects of daily living to live a more independent life. Recent advances in soft robotics offer new perspectives and benefits. This article presents a three-dimensional (3D)-printed soft hand exoskeleton and an assessment protocol, i.e., hand exoskeleton assessment protocol (HEAP). The exoskeleton is printed using thermoplastic polyurethane material and is equipped with an electrooculogram (EOG) to manipulate the finger flexion and extension. A voluntary blink activates the exoskeleton and grips using a current control and finger position. The HEAP evaluates the hand exoskeleton’s ability to perform tasks such as grasping, lifting, rotating, and releasing an object. The grasp lift rotate (GLR) score quantifies these tasks’ success as a metric. It was tested on a healthy human hand and a 3D-printed hand. The results demonstrate the feasibility of the design to grasp, lift, rotate, and release a wide range of objects in Yale-CMU-Berkeley benchmark object sets, such as a tennis ball, screwdriver, and card. The results also indicate that the exoskeleton performed better on a human hand than a 3D-printed hand. The human hand successfully gripped all 15 objects, whereas the 3D-printed hand managed to grip 11 objects. The GLR score averages 3.79 with the human hand and 2.7 with the 3D-printed hand. These findings show the protocol’s potential in evaluating the performance of a hand exoskeleton in activities of daily living.
Introduction
In the past decade, the designs of hand exoskeletons have evolved tremendously along with the rapid technological progression. Previously, the exoskeletons were made of rigid materials. 1 These designs are mechanically complex, heavy, and bulky; therefore, they are preferred for rehabilitation and task-training exercises. They also require additional link(s) to align with the finger joint axis.2–4 This adjustment introduces extra mass to the system, thus limiting its mobility and application. Soft material addresses this issue and introduces new design alternatives. 5 The elastic nature of the soft material aligns the exoskeleton with the finger joint’s axis of rotation without additional link or mechanism. It also provides comfort and safer human–robot interaction. Its low density reduces the exoskeleton weight, making it lighter and more suitable for activities of daily living (ADL).
The recent developments of the soft hand exoskeleton are reported in Ref. [5–19]. Some of them are five-finger exoskeletons, such as the GraspyGlove 7 and RELab tenoexo, 8 whereas the others are three-finger exoskeletons, such as Exo Glove poly II5 and ironHand. 9 Most of them use cable-driven mechanisms to make compact and light exoskeletons, with few exceptions, such as RELab tenoexo 8 and exoskeletons by Ref. [16,17]. The RELab tenoexo used a linear actuator and rack and pinion mechanism. Takahashi et al. 16 used McKibben artificial muscle. Li et al. 17 used a soft pneumatic actuator. Despite the variations in design features and actuations, these studies produced encouraging results: soft hand exoskeletons can be light and compact and grasp objects of daily living. A detailed review of the existing hand exoskeleton can be found in Ref. [1,20].
Existing literature considered electroencephalography (EEG) and electromyogram (EMG) to be plausible modalities to control the hand exoskeleton.21–23 Zhang et al. 21 used a multimodal EEG, electrooculogram (EOG), and EMG approach to control a five-fingered exoskeleton for multiple grips. Soekadar et al. 22 and Crea et al. 23 proposed the combination of EEG and EOG. Although these methods allow direct communication between the exoskeleton and the wearer, they have merits and limitations. EEG is noisy and has less spatial resolution. It also requires greater processing power to analyze the signal. EMG can be a better option. However, an appropriate muscle must be identified without interfering with or affecting the muscle’s original function. An EOG, which measures eye blink, can be a practical alternative. The electrode can be easily attached around the eyes to obtain reliable readings. The spatial and temporal differences between voluntary and involuntary blinks are distinctive, and the data processing is relatively easy.
Although the existing exoskeletons can grasp various objects, there is a lack of uniformity in assessing or evaluating their abilities, especially before the clinical study. The assessment criteria are diverse, with most studies focusing on the position of distal interphalangeal (DIP), proximal interphalangeal (PIP), and metacarpophalangeal (MCP) joints, 19 whereas the others examined the gripping force.2,16 Several studies demonstrated the ability of the exoskeleton to grasp and lift objects, e.g., a cup, smartphone, paper roll, and screwdriver; 7 a ball and water bottle; 8 water bottle; 10 and glass, cup, brush, ball, and 1 kg bag. 12 However, daily living objects can come in different shapes, sizes, and weights. The ability to move the DIP, PIP, and MCP joints and exert specific gripping force does not necessarily correspond to the ability to grasp objects with various geometric properties. This issue creates a gap in translating the novelties of the existing hand exoskeletons to their practical use for ADL.
The Yale-CMU-Berkeley (YCB) benchmark object set 24 is a popular standard in robotics. This benchmark comprises different shapes, sizes, textures, weights, and rigidities. These items are divided into five categories: food items, kitchen items, tool items, shape items, and task items. The benchmark uses different protocols for different applications. The gripper assessment protocol (GAP) 25 and anthropomorphic hand assessment protocol (AHAP) 26 are the two most commonly used protocols. Robotic grippers or manipulators use GAP to pick and place tasks for autonomous objects. Tactile Model O 27 uses the GAP protocol to measure its performance in gripping and placing YCB objects. AHAP focuses on the posture and gripping of an anthropomorphic hand, such as a prosthetic hand. The self-actuated tenim hand 28 and the synergy-inspired three-fingered hand 29 used AHAP as a tool to measure the ability of the hand to grasp various objects. Benchmarking the design of a soft hand exoskeleton using a readily available object set such as the YCB benchmark can be crucial as it provides a uniform and comprehensive method to evaluate the exoskeleton’s ability.
Several studies5–8,18,21,30–32 had been conducted in developing soft hand exoskeletons for ADL. Some of them18,21,30–32 measure human intention to control multiple grips. This method allows the user to select numerous grips by activating unique signals from the same recording sites. The common mode of activation uses EEG sensors with multiple channels. However, none of them discussed the standard to evaluate the performance of hand exoskeletons in ADL. Each study uses a random object to perform specific tasks and measure the relevant grip parameters. The hand exoskeleton assessment protocol (HEAP) benchmark allows researchers to measure devices according to a standard protocol. This benchmark is devised for three tasks: gripping, lifting, and rotating ADL objects. The grasp lift rotate (GLR) score also measures the device’s reliability and success in performing each task.
From the above considerations, it can be concurred that (1) a soft hand exoskeleton with a cable-pulley mechanism is preferred over the rigid exoskeleton; (2) despite the numerous design attempts, none of them were evaluated using the same method or standard, and (3) a more complex modality, such as EEG or EMG, was used to manipulate the exoskeleton, but it may not be practical for daily use. To further simplify the existing design and enhance its practicality without compromising its functionality to grasp objects of daily living, this study proposes (1) a soft hand exoskeleton that is 3D-printed using thermoplastic polyurethane (TPU) material and can be controlled using EOG to manipulate (grasp, lift, rotate, and release) an object and (2) a new protocol, HEAP, to examine the ability of the exoskeleton to grasp, lift, rotate, and hold the objects used in the YCB benchmark. Some distinctions that differentiate this exoskeleton from others are:
The exoskeleton is 3D-printed using TPU. This process differs from the conventional fabrication method that requires casting and molding. 3D printing allows the parts to be easily customized according to the user’s hand and finger geometries. Using soft material such as TPU eliminates the need for additional parts/linkages to align it with the finger joint axis. It also reduces the overall weight and volume of the exoskeleton. Lastly, it improves user safety because it is soft, malleable, and does not have sharp edges that can potentially injure the user. This design creates a safer interaction between the user, the exoskeleton, and the environment. It uses an EOG signal to flex and extend the finger. This technique is unique and practical because it does not need sophisticated processing, and more importantly, the user can attach the electrodes without assistance. It does not have a thimble. Instead, it has a brace that constrains the DIP joint, creating a unique design that forms a claw-like posture and relies on the user’s fingertip to grasp and hold objects.
These features are expected to widen the adoption of wearable exoskeletons, not just limited to medical and rehabilitation institutes but also for home and daily use. It is also hoped that the proposed protocol can potentially allow other future hand exoskeleton designs to use the same benchmark to evaluate the efficacy of the designs and compare the results with other exoskeletons.
Soft Hand Exoskeleton
Design
Several design requirements were considered to develop a hand exoskeleton suitable for daily use. One of them is compact and light. The mechanical structure of the exoskeleton must be small and light such that it does not encumber the natural movement of the finger when grasping an object. The other requirement is wearability. It must be comfortable since it will be used for a long period. Another consideration is that it must adopt the underactuation mechanism such that the overall structure worn around the finger can be small and compact. The last requirement is the two-finger exoskeleton. Several studies1,5,6,30 suggested that the index finger and middle finger are the most frequently used for grasping objects; therefore, the two-finger exoskeleton is sufficient and can be used for ADL.
The hand exoskeleton is made of several 3D-printed parts. These parts are designated as the finger brace A, finger brace B, palmar wire sheath, and thumb brace, as shown in Figure 1. They are printed using TPU filament with a shore hardness of 95A. TPU is a commonly used material for printing flexible 3D-printed parts. Earlier soft hand exoskeletons used traditional manufacturing processes and sometimes required actuators to be placed during fabrication. 3D printing improves the precision in engineering the soft parts and significantly minimizes the volume of the finger. Likewise, it reduces the manufacturing cost and the weight of the parts. The finger parts are 1.25 mm thick. Pulleys are designed to guide and actuate their respective phalanges. The printing settings are customized to 0.15 mm layer height and shell thickness of 0.4 mm. The infill density is set at 5% and of cubic pattern to create lightweight and flexible components. The inflow density is set at 105% for better TPU layering.

An overview of the soft hand exoskeleton.
Finger brace A combines the distal and middle phalanges and limits the DIP joint angle to 32°. Finger brace B is worn around the proximal phalange. The palmar wire sheath isolates the cable from the external environment. It also prevents the bowstringing. The thumb brace acts as a firm stationary support to hold an object. The brace can be manually adjusted for a more suitable and comfortable thumb abduction or adduction. With finger braces A and B, the thumb brace forms a claw-like posture that eases object grasping. This configuration also offers a more compact and lightweight hand exoskeleton design.
Studies3,33 suggested that a more significant portion of ADL requires the functioning of three fingers, namely the index finger, middle finger, and thumb. They also proposed that an adjustable thumb brace would be sufficient to grasp an object and function accordingly. Study 34 also indicates that many grips require distal and metacarpal phalanges to generate the maximum gripping force. This phenomenon is seen in power grip, where the finger curls around the object’s surface until the hand grips it firmly. However, this functionality still requires an underactuation mechanism. Therefore, the device must control the finger actuation independently while gripping. This process also assists in effectively gripping objects with different shapes and sizes.
The human hand has a complex structure with 15 joints and 20 degrees of freedom, and controlling all of them simultaneously can be challenging. To simplify the design without losing its intended functionalities, two cables, i.e., flexor cable and extensor cable, are used to flex and extend the fingers. The flexor cable is wound around the flexion motor spool, and the extensor cable is around the extension motor spool. Both cables are split into two branches and anchored around the finger brace A, as shown in Figure 1a. The only difference between them is that the flexor cable passes through the palmar side of the finger brace B and the palmar wire sheath. In contrast, the extensor cable passes through the dorsal side of the finger brace B and palmar wire sheath. The finger flexes when the flexion motor rolls the cable in to generate sufficient tension. At the same time, the extension motor rotates in the opposite direction to loosen the extension cable. Similarly, when the extension motor generates sufficient tension to extend the finger, the flexion motor rotates in the other direction. It relaxes the tension so the extension motor can roll the cable without resistance.
Control strategy
Two direct current (DC) motors (Herkulex smart servo DRS-0101 7.4V, Dongbu Robot) activated the exoskeleton into flexion or extension. The motors are attached to the wrist using a 3D-printed part made of polylactic acid (PLA) and a Velcro strap. This attachment provides a wrist-free motion for the user. A custom-designed spool with two grooves is fitted to the motor shaft to wind the cable (Fig. 1b). The first groove has an inner diameter of 17.5 mm intended for cable attached to the index finger. The second groove has an inner diameter of 21.5 mm for the middle finger cable.
Three types of sensors were used as the inputs: (1) flex sensor (FSL0095103ST, Spectra Symbol) to measure the MCP joint angle; (2) current sensor (INA219, Texas Instrument) to measure the motor current; and (3) EOG (Spikershield, Backyard Brains) to measure the voluntary eye blink. Two EOG electrodes are placed on the user’s left orbital ridge and left mastoid. 35 A master controller, Arduino Mega (Arduino.cc), was programmed to process the input signals and control the DC motors.
Figure 2 illustrates the activation of the hand exoskeleton to perform finger flexion and extension using the EOG signal. If the fingers are in extension, a single voluntary blink activates the hand exoskeleton, flexes the fingers, and performs the light grip. If the wearer blinks twice, the hand exoskeleton will perform a strong grip. Whether it is a light or strong grip, the voluntary blink will initiate the current control strategy to monitor the current drawn by the motor, estimate the gripping force, and manipulate the current supplied to the motor. An experiment measures a force-to-current relationship, determining grip applied to a controlled current. The current control strategy regulates the current and, with it, the force. A similar experiment is shown in Ref. [30]. In light grip mode, the motor can draw a maximum current of 0.95A, corresponding to approximately 4.23 N gripping force. With this, it can hold small objects, such as markers and cards. In strong grip mode, the motor can draw a larger current of up to 1.25 A, equivalent to 10.12 N gripping force. It was reported that a grip of 10 N is sufficient for gripping.1,5,7 This grip allows the user to impose a firmer grip to hold heavier or larger objects. Objects that weigh more than 50 g or have a diameter of more than 50 mm require strong grip mode. A similar grip mode is seen in Ref. [25,26] as well as the choice of grips in Ref. [34]. A voluntary blink will activate the position control strategy if the fingers are flexed and are in light or strong grip condition. This method monitors the MCP joint angle and manipulates the fingers back to extension by rewinding the extensor cable to the spool. The motor draws minimum current while performing this action. It stops when the MCP joint angle reaches 0° (or in full extension).

Activation of the soft hand exoskeleton using electrooculogram.
Energy storage is an essential element of the hand exoskeleton, especially if it is meant for daily use. The human hand performs an average of 7,500 actions for 7.5 hours a day. 36 With a 20 Ah battery, it was found that the exoskeleton can continuously perform 13,000 cycles of finger flexion (6,500 cycles of light grip and strong grip each) and finger extension for 5 hours. This power consumption is on par with the other existing designs.5–9
Electrooculogram
Different people have different EOG characteristics; therefore, a calibration process is needed to distinguish voluntary and involuntary eye blinks. It is divided into two parts and must be performed before using the device. The first part requires the user to blink voluntarily every 4 seconds. The second part requires the user to remain stationary so that the eyes blink involuntarily. An inverting bandpass filter with a cutoff frequency of 1–50Hz and a notch filter at 60 Hz was used to process the EOG signal. 30 The bandpass and notch filter are tuned to minimize eye tracking and involuntary blinking. 21
A sample of the calibration results is presented in Figure 3. It can be observed that the voluntary blink has a larger EOG signal amplitude (VEOG ≈ 0.4 mV) than the involuntary blink (VEOG <0.2 mV). The duration of a voluntary blink is longer (0.15 seconds < tEOG <0.59 seconds) than during an involuntary blink (0.09 seconds < tEOG <0.13 seconds). These characteristics are used to differentiate voluntary and involuntary blinks. In this study, it is a voluntary blink if VEOG exceeds the 0.2 mV threshold and tEOG is longer than 0.175 seconds to return to normal state. Similarly, if it is <2 mV and takes <0.175 seconds to return to normal, then it is an involuntary blink.

Voluntary and involuntary blinks in electrooculogram (EOG) signal (VEOG is the EOG signal amplitude during the voluntary blink, and tEOG is the duration of the voluntary blink).
Hand Exoskeleton Assessment Protocol
This study proposes a new method called “hand exoskeleton assessment protocol,” or HEAP, to evaluate the overall performance of the hand exoskeleton. Traditionally, hand exoskeletons were assessed for rehabilitation and improving motor functionality. 1 However, none of the hand exoskeletons designed for ADL were tested on a standard benchmark or protocol. The YCB24 benchmark was intended initially to measure grips using everyday objects. Study in Ref. [25] measures grip with soft grippers, whereas the other study 26 measures grip with prosthetic grippers. HEAP takes inspiration from these studies and develops a protocol that measures grip, lift, and rotate activities. Similarly, the object sets that are commonly used and seen for ADL are selected. It assesses the ability of the exoskeleton to perform several basic hand motions, such as grasping, lifting, and rotating an object.
In this approach, the object is initially placed on a stationary platform. The hand exoskeleton performs four primary tasks, as summarized in Table 1. In the first task, it is required to grasp the object using the correct pose. A score of one will be awarded if it grabs the object using the right posture. A score of 0.5 will be awarded if the hand exoskeleton grasps the object using a different pose. A zero score will be given if it fails to grasp the object. In the second task, the hand exoskeleton must lift the object 10 cm above the platform and hold it for 3 seconds. A score of one will be awarded if the hand exoskeleton successfully performs this task. A score of 0.5 will be awarded if the object slips but remains between the fingers. A zero score will be given if the object is dropped. In the third task, the hand exoskeleton is rotated 90° in a counterclockwise direction and is required to hold the object for 3 seconds. Similar to the second task, a score of one will be awarded if it can complete this task. A score of 0.5 will be given if the object slips. A zero score will be given if the object is dropped. In the last task, the hand exoskeleton is rotated back to its original position. It then puts the object down back on the platform. A similar scheme is applied here. A score of one will be awarded if the exoskeleton can complete this task without dropping the object. A score of 0.5 will be given if the object slips. A zero score will be given if the object is dropped. Since every task must be performed sequentially, no mark will be awarded for the subsequent task if the exoskeleton fails. These four tasks are crucial, as they are the fundamental tasks performed by the hand in ADL.25,26
Hand Exoskeleton Assessment Protocol
Ten trials were performed for every object listed in Table 2. A total of 15 YCB benchmark objects were selected and categorized into 4 groups: four large round objects, 3 small round objects, 4 tool kit objects, and 4 everyday use objects. A numerical GLR score is calculated as defined in (1), where S1, S2, S3, and S4 are the scores obtained from the first, second, third, and fourth tasks, respectively. A maximum score of four means that the hand exoskeleton can help to grasp, rotate, and hold the object firmly and complete all four tasks without dropping the object. A score of zero means that it fails to grasp the object. An average GLR score is calculated for every object to measure the hand exoskeleton’s ability to hold the object and complete all tasks. The average GLR score is mathematically computed as in (2), where i is the number of trials and N is the total number of trials conducted in this study (n = 10).
List of Objects of Daily Living and Their Properties
The soft hand exoskeleton was tested on a 3D-printed hand, i.e., the Flexy hand, 38 and on a healthy human hand. The Flexy hand was 3D-printed using PLA. A nonfunctional anthropomorphic hand imitates the patient’s inability to grasp and hold an object. This approach provides a better outlook on how the exoskeleton behaves in a real-life scenario. The author held, rotated, and moved the Flexy hand and performed voluntary blinks when it performed the assigned tasks, including gripping, lifting, holding, and rotating objects listed in Table 2.
One healthy male volunteer (33 years old; height: 175 cm and weight: 84 kg) participated in this study. Before obtaining written consent, he was briefed on the experiment’s objective and protocol. Monash University Human Research Ethics Committee approved this study with project reference no. 28181. The participant wore the exoskeleton on his right hand. When the fingers of the hand exoskeleton are in extension and the participant blinks once, a light grip mode is activated. When the participant blinks twice, a strong grip mode is activated. When the fingers are in flexion and gripping an object, the participant blinks once to release the object. The GLR score was recorded using the participant’s MCP joint angle and gripping force.
Results
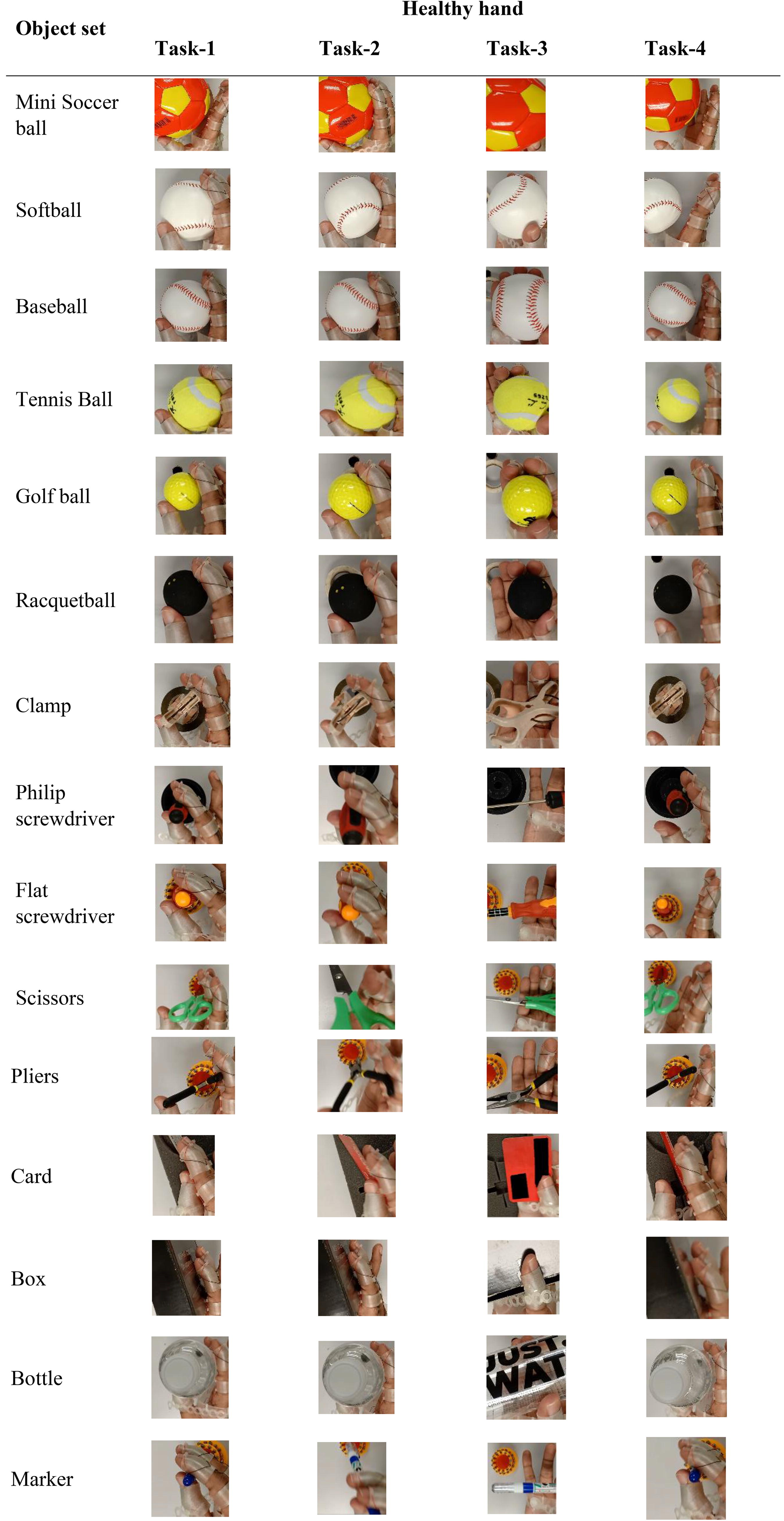
The ability of the hand exoskeleton to grip various objects of daily living is shown in Tables 3 and 4. The GLR score is presented in Figure 4. The hand exoskeleton could grip all objects using the intended pose when worn on a human hand. With a few exceptions, objects such as a mini soccer ball, a golf ball, and a scissor slipped when it was rotated 90°. This failure to grip led to lower GLR scores. The slip could occur for several reasons, such as low surface roughness of the object and poor contact between the fingertip and the object. Nevertheless, the grip was still sufficiently strong, thus allowing the remaining tasks to be completed without dropping the object.

The soft hand exoskeleton Grasp lift rotate score.
Snapshots of Soft Hand Exoskeleton Performing Hand Exoskeleton Assessment Protocol

Snapshots of Soft Hand Exoskeleton Performing Hand Exoskeleton Assessment Protocol
The Flexy hand failed to grip a few items, such as a mini soccer ball, scissors, a box, and a marker. Hence, these objects have zero GLR scores. One of the main differences between the Flexy hand and the participant’s hand is that the participant can abduct and adduct the index finger and middle finger. When the participant was holding these objects, he might have subconsciously abducted his fingers and created a larger grasping area. This action allowed the fingers to wrap around the item and hold it firmly.
Flexy hand cannot abduct or adduct its fingers. Thus, it could not grasp a mini soccer ball, the largest item used in this experiment. The Flexy hand could neither hold a marker nor a smooth surface scissor. Both items slipped and dropped during the experiment. Similar outcomes were observed even though the posture was changed to power grasp. This issue occurred because the Flexy hand fingertip and the objects have low surface roughness; therefore, they could not grasp the object firmly. The Flexy hand could not hold the paper box because the thumb could not adjust and form a parallel extension grip.
Different MCP joint angles were observed when the hand exoskeleton gripped the objects. The variations in the MCP joint angle were intuitive and logical. The joint angle’s magnitude depends on the item’s geometrical properties and the gripping posture. The larger the item, the greater the joint angle. This phenomenon comes with a few exceptions. For example, a larger MCP joint angle was found when the exoskeleton was worn on the Flexy hand. Although the cross-sectional area of the card is small, it holds the card using a different posture, as seen in Table 5. It does not compromise the ability of the hand exoskeleton to grip, hold, and rotate the cards as intended.
Gripping Force and Average and Standard Deviation of Metacarpophalangeal (MCP) Joint Angle
The results also show that the predefined light and strong gripping forces were sufficient to hold objects of daily living. Although several objects slipped from the grip, they were not dropped during the experiment. The slipping occurred mainly due to the roughness of the item’s surface and fingertip. Items with smooth surfaces, such as a scissor and a marker, could slip easily. Human natural hand fingertip stiffness and surface roughness can mitigate this issue. When the exoskeleton was worn on a human hand, it could grip, lift, and rotate these objects.
Discussion
The soft hand exoskeleton has been widely considered to be the technological alternative to assist people with hand impairment in ADL. However, the existing designs are bulky. Most of them employed soft pneumatic actuation that uses compressed air to inflate the pressure chamber. These chambers can be large, creating ballooning effects around the hand, making it uncomfortable and inconvenient for many activities. Moreover, constant air pressure is required to transmit and maintain the force to grip and hold an object. Minor air leaks can deteriorate this function. The power losses were found to be much larger than the other types of actuations too. Therefore, these designs are more suitable for stationary rehabilitation purposes and less preferred for mobile use.
Evaluating the soft hand exoskeleton
The use of soft material enhances the overall wearability and comfort. It is lighter and more compact than the rigid link exoskeleton. It is also mechanically compliant. These features create a safer human–robot interaction and thus have the potential to be used for daily activities. The soft exoskeleton design allows for the user’s natural fingertip stiffness. This phenomenon can be observed in Table 3 as the human hand grips and scores with all the YCB objects. Likewise, the 3D-printed hand fails to grip some objects, as seen in Table 4, due to the rigid surface contact between the finger and the object. The Exo Glove Poly 2.05 design highlighted a similar result. The exposed fingertip design with a constraint DIP joint significantly improves the gripping capabilities of the exoskeleton. However, the 3D-printed hand still scores considerably well with other object sets. This score is mainly because of the ability to actuate fingers and wrap the object in between.
The 3D-printed soft parts have several advantages over the traditional fabricated parts. They can be conveniently resized and printed according to the wearer’s hand and finger properties. Printing the parts using soft material, e.g., TPU, allows the parts to be reshaped and better conformed to the hand and finger, thus removing the need for additional components to align the finger joint axis. This method does not require molding and casting to create or fabricate the component, thus reducing the required effort and resources. Limiting the DIP joint to 32° offers a few benefits. It simplifies the overall design of the hand exoskeleton. It also forms a claw-like posture that allows the exoskeleton to grasp an object quickly.
An underactuation mechanism that relies on the tendon/cable to drive the finger motion is preferred in hand exoskeleton design because the overall structure can be made light and compact while allowing the finger to perform basic movement. Like the other designs that used tendon-driven mechanisms, the proposed exoskeleton has the same limitations, including slack and positional inaccuracies. Since the control focuses on the gripping force instead of the position of the fingers, these limitations do not affect its ability to grasp the object. However, minor positional errors may occur when the exoskeleton extends the fingers. These errors will not negatively influence the exoskeleton’s functionality because they return the fingers to the neutral position.
The other limitation of this design and many other soft exoskeletons is that it can only flex and extend the fingers. It cannot manipulate the finger motion. Lastly, it cannot distinguish the object’s essential properties, such as hardness and rigidity. These limitations should not affect its use for ADL to grasp, lift, rotate, and release an object. The hardness and rigidity of the object can be difficult to distinguish; therefore, the user’s perception is required to gauge these properties.
One main benefit of using EOG sensors over other sensors, such as EMG and EEG, is that it only requires three electrodes to be attached to the user’s body. Signal processing is faster and simpler. Moreover, the difference between voluntary and involuntary blinking is distinctive. These characteristics make it easy and intuitive to operate the hand exoskeleton and to grasp and release an object. However, different persons have different EOG characteristics. Calibrating the threshold is critical to ensure the exoskeleton performs flexion and extension correctly.
Benchmark for ADL gripping of hand exoskeletons
Clinicians use several standard tests to assess hand function. Among them are the grasp and release test (GRT) 39 and the Jebsen–Taylor hand function test (JTHFT). 40 In the standard GRT, peg, paperweight, fork, block, juice can, and videotape/book are grasped, moved, and released as many times as possible in 30 seconds. In the conventional JTHFT, a series of activities is performed, such as lifting small and large objects, simulating feeding, stacking checkers, and writing a sentence. Despite their popularity, they were designed to assess patients’ conditions, and several elements can be less relevant to the design and development of hand exoskeletons. For example, in GRT, time is a consideration, and the number of objects is limited to minimize fatigue. In JTHFT, writing sentences can be complex for the exoskeleton, requiring dexterity and delicate coordination of the fingers, wrist, and forearm.
Although many soft hand exoskeletons have been designed and developed recently, the assessment criteria are diverse without a consistent benchmark. This limitation makes it difficult to compare the proposed designs quantitatively and qualitatively. Most studies focused on the kinematic and kinetic characteristics of the finger rather than their practicalities in grasping objects of daily living. This study introduces HEAP to address this limitation. It uses a publicly available set of objects: the YCB benchmark object set, a standard many robotic engineers and researchers use to assess their designs. HEAP has a series of tasks requiring the hand exoskeleton to grasp, lift, rotate, and release an object. It also has numerical measures, i.e., GLR score (Fig. 4), to quantify the exoskeleton’s ability to perform the required tasks. Because the tasks are performed sequentially, the GLR score can be interpreted easily. A zero score implies that the exoskeleton cannot grasp the object. A score of one means it can help to grasp the object firmly. A score of two means it can lift the object without slipping. A score of three means it can rotate the object without dropping it. A GLR score of four indicates that the hand exoskeleton can perform all the tasks correctly without the object slipping or falling from the hand. If the score is in a fraction of 0.5, the object slips from the grasp.
Unlike the standard clinical outcome measures that require the patients to wear the hand exoskeleton to evaluate its capabilities, HEAP can be used to determine the efficacy of the hand exoskeleton before clinical study. This benefit can potentially improve and shorten the iterative design process that involves multiple parties, such as engineers, roboticists, medical practitioners, and patients. It also reduces the risk of incurring additional injury on the patient’s hand or fingers. Lastly, HEAP can be used as a universal benchmark to compare the existing and future soft exoskeletons in grasping various objects, which can consequently accelerate the deployment of the hand exoskeleton for rehabilitation and daily use.
Conclusion
Soft hand exoskeleton has been considered a popular technological alternative to assist hand-impaired individuals performing basic ADL. The summary of this study is as follows:
A 3D-printed soft hand exoskeleton is activated using voluntary eye blinking. A HEAP is introduced that uses the YCB benchmark—object sets evaluate the hand exoskeleton’s ability to grip, lift, and rotate various objects. Results indicate that the exoskeleton can perform these tasks satisfactorily on various items, including a golf ball, a screwdriver, and a bottle. The GLR score indicates the reliability of the exoskeleton in successfully gripping objects with the human hand compared with the 3D-printed hand. It also provides a uniform assessment to measure the ability of the hand exoskeleton to grip, lift, and rotate an object and compare many future hand exoskeleton designs.
Despite its simplicity and ability to perform essential hand functions, several potential improvements can be made to enhance the autonomous features of this design. The instrumentation of the exoskeleton can be enhanced by including a force sensor or pressure sensor at the fingertip. A robust control strategy can be implemented to further manipulatesthe finger motion and control it independently. The human–machine interface that includes EEG to measure human intentions, allowing users to instantly select and perform several grips can be introduced. This phenomenon will provide richer information to interpret the user’s intention and translate it to exoskeleton motion. However, these improvements have to be carefully considered as it will increase the overall weight, computational complexity, and power consumption of the hand exoskeleton, which consequentially can be impractical for daily use.
Footnotes
Authors’ Contributions
T.S.: Conceptualization, writing—original draft, formal analysis, methodology, investigation, and writing—review and editing. D.G.: Conceptualization, writing—review and editing, methodology, supervision, resources, formal analysis, and validation. A.A.G.: Supervision and writing—review and editing. T.K.K.: Supervision and writing—review and editing.
Author Disclosure Statement
All authors declare no competing interest.
Funding Information
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.