
Abstract
To foster attachment to nonliving robots, previous studies have aimed at adding lifelike appearances and movements. In contrast, this study focuses on applying human–animal interaction to nonliving robots. We selected drones as a type of nonliving robot for their agility and potential to fulfill auxiliary roles in domestic environments in the future. In the experiment, we tested whether simulating pet–owner interactions can elicit a stronger emotional connection with these devices. Through experiments that mimic situations of training/nontraining, and playing with pets whose interests shift (fickle personality)/interest remain constant (sticky personality), the study aims to evaluate the effectiveness of these interactive behaviors in enhancing attachment to drones. The results showed that when users recognize that the drone has trained enhances attachment toward the drone. In addition, playing with a drone of a fickle personality induced boredom, whereas a drone with a sticky personality promoted the exploration of new forms of play, mitigating boredom. Moreover, behaviors that attracted the drone gave the impression of interacting with a mammalian creature, while repelling the drone evoked perceptions akin to those of insects.
Introduction
Robots that are designed to assist humans in their daily lives have become increasingly common. These robots often have a shape that is tailored to their function, which results in the appearance and behavior of a nonliving. It is expected that if such robots were treated with the same level of attachment as pets, they would be able to perform their functions more effectively. For example, users who have a pet-like attachment to their automatic vacuum robot may be more inclined to clear the floor to prevent any obstruction of the robot’s path. Regardless of the robot’s functionality, if users feel an emotional attachment to it, they may cherish the robot and use it for a longer time. Previous studies on nonliving robots have reported attaching LEDs to robots to indicate their line of sight 1 and attaching tails to robots for the robots to express emotions. 2 These studies have primarily focused on showing the robot by adding features and movements to make the robot resemble a living being.
In contrast to these approaches, our study focuses on fostering interactive behaviors between users and robots. Specifically, we apply human–animal interaction to nonliving robots, and we include situations such as an owner attracting or driving away a pet, training the pet, and the pet shifting its attention during play with the owner.
This study explores whether promoting interactive behaviors between a user and a nonliving robot could facilitate the development of an intimate relationship with a robot, as evidenced by the participant’s impressions and behaviors. To explore these effects, we selected drones as a type of nonliving robot 3 . Unlike automated vacuum robots that move in a two-dimensional plane, drones are capable of rapid movements and travel in three dimensions. 4 By leveraging this versatility and agility, drones will able to play supportive roles in domestic settings in the future, including for conducting surveillance 5 and carrying objects. 6 In the experiments we tested whether simulating pet–owner interactions can elicit a stronger intimate relationship with a drone.
Our article is structured as follows. After introducing related work in Section 2, we describe the experiments in Section 3. Section 4 describes the results, Section 5 discusses about the results obtained from Section 4, and we conclude by describing our main findings in Section 6.
Related Works
Interactions with nonliving robots have been studied extensively. Representative studies in this field focuses on imbuing robots and artifacts with a sense of animacy through the design of their appearance and movement. Some examples are attaching eyes and arms to artifacts, 7 altering the expressions of robots, 8 and making robots or artifacts move as if they have a purpose (goal-directed movement). 9 Furthermore, recreating the endearing appearance, tactile qualities, and behaviors of pets in robots has been reported to have therapeutic effects, akin to those observed with pet therapy.10–13 Previous studies that were focusing on drones have proposed to express emotions,14–16 personality, 17 and sociability6,18 through the manipulation of parameters such as movement speed, acceleration, and altitude, as well as through innovations in appearance. These studies aimed to enhance the impression that drones made on humans through modification of drone movements. Another study reported that attaching eyes to drones reduced resistance to interacting with them. 19 These studies investigated the effects of changes in appearance and did not clarify whether interactions between users and drones could improve user perceptions of drones. This study focuses on applying human–animal interaction to drones without altering their appearance.
Experiments
The purpose of this study is to implement the human–animal interaction using a drone to test whether users can feel an emotional attachment to drones, and to observe changes in user behavior. Among various human–animal interaction, we applied two situations to the experiment. The first experiment mimicked a situation in which an owner trains their pet, and the second experiment mimicked a situation in which a pet’s interests shift during an interactive play session with its owner.
Hypothesis
Previous studies have reported that the dog training methods, known as “clicker training,” can be applied to robots,
20
and the communication of learning states in training through natural behaviors to impress users as teachable.
21
These studies focused on training robots that resembled animals, and they did not determine whether such methods would be effective on inanimate-type robots. In addition, training nonliving robots could lead users to perceive them as intelligent animals, such as mammals. Therefore, we formulated the following hypothesis: After training the drone, users perceive it to be an intelligent animal, and experience increased emotional attachment to the drone.
To test Hypothesis 1, Experiment 1 compared the training condition with the nontraining condition.
Previous studies have reported that a robot’s unexpected responses give the impression that it has an intention,
22
and when a robot does not always react in the same way to a user’s actions but instead shows varied responses, this enhances animacy.
23
Pets often show fickle behavior in their interactions with humans, such as suddenly losing interest in a toy. Therefore, we formulated the following hypothesis to investigate whether a similar phenomenon could be observed with nonliving robots. Therefore, we formulated the following hypothesis: When the drone exhibits a change in interest during play, users perceive it to be like an intelligent animal, enhance a stronger emotional attachment to the drone, and find playing with the drone less boring.
To test Hypothesis 2, Experiment 2 compared two drone personalities: one with shifting interests (fickle personality) and one with remain constant interests (sticky personality).
Conditions
In Experiment 1, participants were tasked with training the drone not to approach designated objects. The conditions were as follows:
Training condition: Participants trained the drone to refrain from approaching designated objects. The drone approached the designated object four times during the initial three minutes of the experiment, and it did not approach the designated object from then on until the end of the experiment.
Nontraining condition: Participants were not given any training instructions. Therefore, the drone approached the designated object throughout the entire duration of the experiment.
Figure 1 shows the details of each condition. The overall time of the experiment was six minutes. In a preliminary experiment, some participants felt that the drone did not learn their instructions if the drone approached balloons four or more times. Therefore, in the training condition, the drone exhibited learning behavior over time. The drone approached a designated object four times during the initial three minutes of the experiment, and it did not approach the designated object from then on until the end of the experiment. In addition, to enhance the perception of successful training, the drone’s first two approaches toward the balloons were executed rapidly, whereas the subsequent two approaches were executed more slowly. To minimize bias in drone flight between conditions, the drone approached objects placed in the experimental room, approximately once in 10 seconds in both conditions. Upon reviewing the recorded video, the average number of approach events (standard error) was 31.4 (0.55) in the training condition and 35.0 (0.84) in the nontraining condition.

Flow of Experiment 1.
In the nontraining condition, participants were not motivated to interact with the drone. Therefore, participants in both conditions prevented the drone from approaching them. The drone approached the participants a total of ten times, regardless of whether the experimental condition was the training or the nontraining condition.
In Experiment 2, we designed the drone’s personality to be either sticky or fickle. Participants were presented with three musical instruments, and the task involved the drone responding to and approaching only one of these instruments, which was the target musical instrument. The conditions were as follows:
Sticky condition: When the participant plays the target musical instrument, the drone shows interest in the instrument and approaches it. Regardless of whether the participant continues playing the instrument, the drone maintains its interest in the same instrument throughout the experiment.
Fickle condition: When the participant plays the target musical instrument, the drone shows interest in the instrument and approaches it. If the participant persists in playing the target instrument for 5 seconds, the target instrument that captivated the drone’s interest shifts.
Figure 2 shows a flowchart of the process for determining the target musical instrument that the drone shows interest in. Participants needed to observe that the drone showed interest in specific musical instruments and not in others. Therefore, the drone was not interested in the first musical instrument; instead, it showed interest in the second musical instrument played by the participant.

Flowchart of Experiment 2 depicting the process for determining the target musical instrument in which the drone shows interest.
In the preliminary experiment, we set the condition for shifting the target instrument that attracted the drone’s attention based on the elapsed time from the start of the experiment. However, this approach proved inappropriate because the target instrument would shift regardless of whether participants played it, a mismatch occurred between participants’ behaviors and the drone’s interest. Therefore, we tested the conditions shifting the target instrument based on the duration of the instrument playing. When we set the playing time as 1 or 2 seconds for shifting the target instrument, the target instruments switched too frequently, and the drone could not approach them. When we set the playing time as 10 seconds for shifting the target instrument, we observed that a lot of participants did not play the same instrument for extended periods, resulting in a situation similar to the sticky condition. Therefore, we designed 5 seconds, which is the middle time, as the shifting intervals in the fickle condition.
Setup
We conducted experiments in an indoor setting to eliminate the effect of weather conditions on the drone’s movement. We chose the Tello 1 drone for its moderate size and its suitability for indoor flight. Two experiments were conducted using the Wizard of Oz method. Cameras were positioned at two points, one in front and another behind the participant, to facilitate comprehensive observation of the entire experimental area. An experimenter who was in a separate room controlled the drone remotely by monitoring videos captured by the cameras. During the initial trials, some participants expressed fear about the exposed propellers of the drone. Therefore, we enclosed the drone in a protective cover. During the experiment, the drone began its flight at the center of the room and moved freely within the space. To ensure the drone’s safety and to mitigate any fear among the participants about its proximity, the drone and its stand were physically tethered by a thread, which controlled the range of the drone’s movements. Additionally, participants were instructed to remain at a designated position to ensure that the distance between them and the drone did not become too short.
Procedure
Mimic situations of training or nontraining the pet (experiment 1)
We set six objects such as shelves, clothes, a table, a calendar, stuffed animals, and balloons in the experiment room, and the drone flew around the room. Participants trained the drone to keep away from the balloons, as contact would pop the balloon. We gave participants a laser pointer to standardize their interaction. Whenever the light of the laser pointer touched the drone, the drone returned to the center of the room and moved away from the target object. This method allowed for maintaining an optimal distance between the participant and the drone.
The overall time of the experiment was six minutes. To investigate whether participants exhibited hesitation to stop the drone, participants halted the drone by striking it with a stick at the end of the experiment. This was done with the expectation that if participants felt attachment or intimacy to the drone, they would experience reluctance toward this behavior.
The following are the instructions provided by the experimenter to the participants at the beginning of the experiment:
“Upon contact with the light of the laser pointer, the drone will return to the center of the room.” “[Training condition only] Please use the laser pointer to instruct the drone to refrain from approaching the balloons, as it is dangerous if the balloons pop.” “Do not allow the drone to approach you.” “When it is time for the experiment to end, we will ring the doorbell. At that time, please hit the drone with a stick to stop it.”
Mimic the pet’s fickle personality or sticky personality (experiment 2)
Participants were presented with three musical instruments, and the task involved the drone responding to and approaching only one of these instruments. The experiment room was equipped with a desk and a drone, and on the desk were three musical instruments: a maraca, a tambourine, and a handbell. The participant plays one of these musical instruments, and the drone responds by approaching the participant, reacting only to the specific instrument being played.
The duration of the experiment was six minutes. The drone primarily hovered at a distance from the participant, approaching only when the participant played the target musical instrument. The participants were limited to playing only one instrument at a time. When the participants moved the musical instrument up, down, left, or right, the drone followed the movement of the instrument.
The following are the instructions provided by the experimenter to the participants at the beginning of the experiment:
Please play with the drone using the musical instruments." "Do not play more than one type of instrument at the same time.
Measurement
Questionnaires
After the experiment, the participants completed a questionnaire about their impressions of the drone. We set the questions corresponding to the hypotheses as “Attachment,” “Animacy,” “Mammal,” “Bird,” “Fish,” “Insect,” and “bored.” We regarded mammals, birds, fish, and insects in descending order of being perceived as intelligent animals. Table 1 shows that questionnaires included items that were common to both experiments and specific questions tailored to each experiment. The statements were rated on a 7-point Likert scale, where 1 = strongly disagree, 4 = neutral, and 7 = strongly agree. In addition, the participants described the reasons for the responses in the open-ended description.
Statement about Impression of Drone
Analysis of participants’ behaviors
In the Experiment 2, participants were observed engaging with a single musical instrument and the drone for extended periods. This was not merely because the participants were playing the instrument, but also because they were exploring how the drone followed the movement of the instrument. Therefore, we studied this behavior as the time spent exploring or playing with the drone. The time spent was analyzed frame by frame using video processing with Media Pipe. The decision range was defined by an ellipse centered on the participant’s waist, as shown in Equation 1, with the horizontal axis at the edge of the table and the vertical axis at eye level. If Equation 1 was satisfied, it was determined that the participant’s wrist that was holding the musical instrument was outside this ellipse. The area of the ellipse is illustrated in Figure 3. As shown in Figure 3(a), when the participant was merely playing the musical instrument, their wrist was located inside the red ellipse. Conversely, as shown in Figure 3(b), when the participant was exploring play with the drone, their wrist was located outside the red ellipse.

Determining whether the participant was exploring play with the drone. We determined whether the participant’s wrist holding a musical instrument was outside of the red ellipse.
Wr: Coordinates of the wrist
Wa: Coordinates of the waist
R: Radius of the ellipse
Examination of participants’ behaviors to drive away or attract the drone
In Experiment 1, participants attempted to drive the drone away, and in Experiment 2, participants attempted to attract the drone. Therefore, by comparing the no-training condition from Experiment 1, and the sticky condition from Experiment 2, which were the baselines for each experiment, we examined the behaviors that were intended to drive away/attract the drone. In this examination, we used the same questionnaire items, which were common to both experiments’ questionnaire items (Table 1).
Participants
To prevent one condition from influencing participants’ perceptions of the other, two experiments were conducted using a between-subjects design, which each participant participated in only one of the conditions. Participants were college students between the ages of 18 and 24 who lived in the neighborhood. Twenty participants (ten males and ten females) were assigned to Experiment 1, and 26 participants (13 males, and 13 females) were assigned to Experiment 2. Thus, a total of 46 individuals participated in these experiments.
Results
The results of Experiment 1 are shown in Figure 4, wherein each box represents the mean value of the responses to each statement, and each bar represents the standard error of the mean value. We conducted an unpaired t-test on the questionnaire results. We found a significant difference in the questionnaire item about attachment [t(18) = 3.40, p < .01], and a significant trend in the questionnaire item about animacy [t(18) = 1.88, p = .08]. For the question about the type of animal, we found a significant difference in the questionnaire item about mammals [t(18) = 4.22, p < .01], and found a significant trend in the questionnaire item about birds [t(18) = 2.02, p = .08]. In the question regarding the Experiment 1, we found a significant difference in the questionnaire item about intimacy [t(18) = 2.28, p < .05] and sorry [t(18) = 2.87, p < .05]. Therefore, the results support Hypothesis 1.
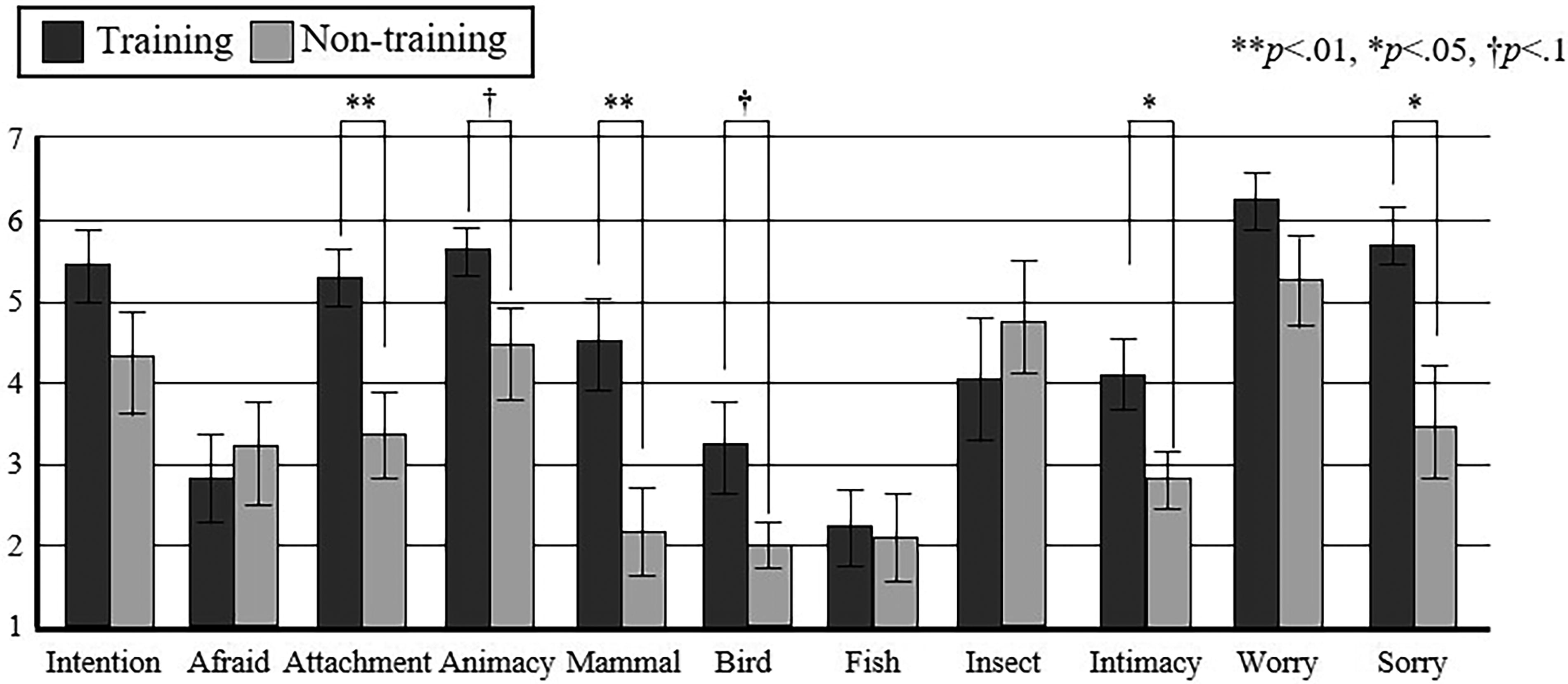
Results of Experiment 1.
The results of Experiment 2 are shown in Figure 5. We conducted an unpaired t-test on the questionnaire results. For the question about the type of animal, we found a significant difference in questionnaire item about insects [t(24) = 2.26, p < .05]. In the question regarding Experiment 2, fickle condition scored higher than sticky condition in the questionnaire item about being bored [t(24) = 2.21, p < .05]. In addition, we found that participants spent more time exploring or playing with the drone in sticky condition than fickle condition [t(24) = 2.09, p < .05]. Therefore, the results did not support Hypothesis 2.
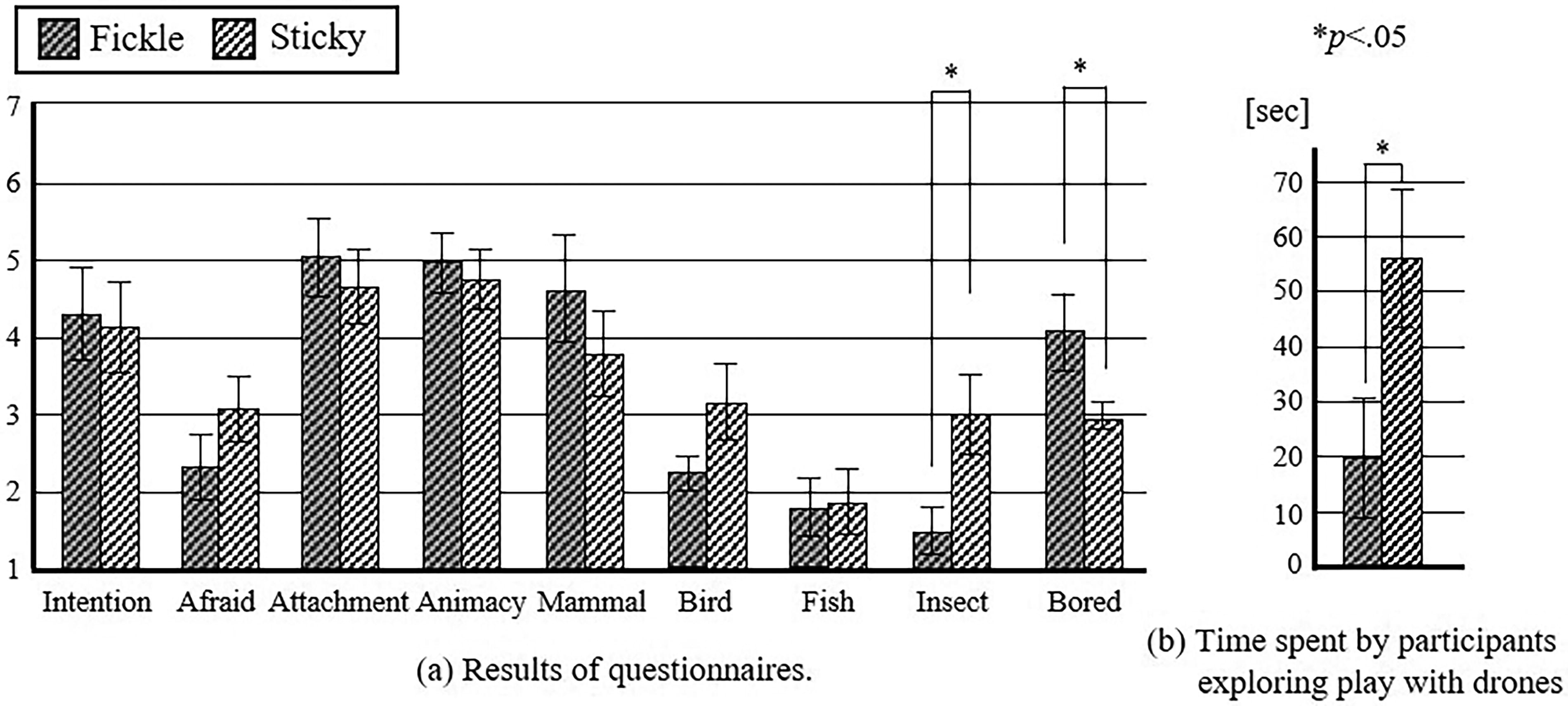
Results of Experiment 2.
The results of the comparative analysis of participants’ behaviors in driving away and attracting the drone are shown in Figure 6. We conducted an unpaired t-test on the questionnaire results. We found a significant difference in the questionnaire item about attachment [t(21) = 2.13, p < .05]. For the question about the type of animal, we found a significant difference in the questionnaire item about mammals [t(21) = 2.16, p < .05] and in the questionnaire item about insects [t(21) = 2.01, p < .05]. In addition, we found a significant trend in the questionnaire item about birds [t(21) = 1.86, p = .078].
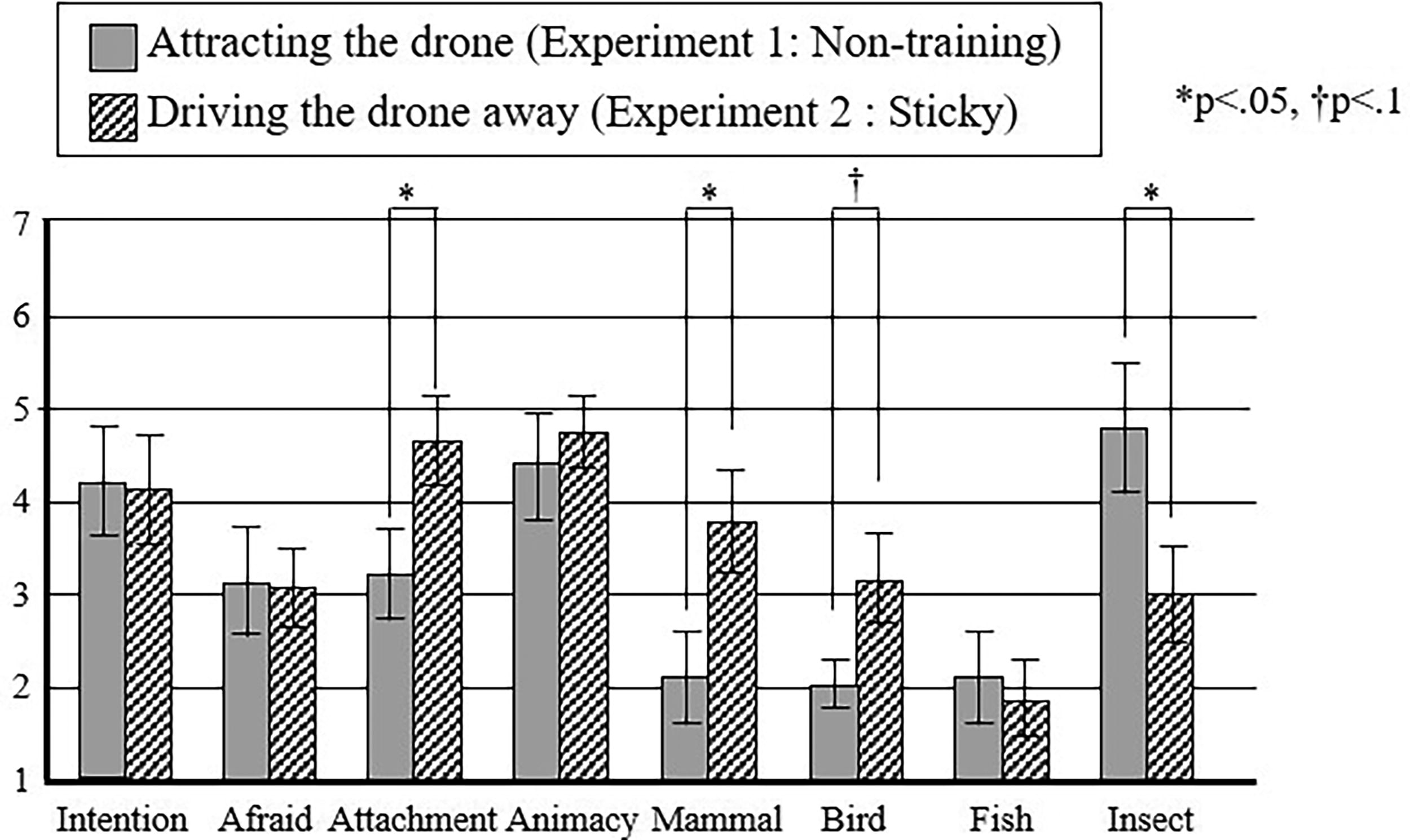
Results of comparison of participant behaviors in driving away and attracting the drone. The no-training condition means the drone was driven away, and the sticky condition means the drone was attracted.
Discussion
After training the drone, we found that participants perceived the drone as an intelligent animal like a mammal, and their attachment to the drone increased, and these results support Hypothesis 1. According to the interviews of the participants in the training condition, five out of six who scored above five for the mammal-like impression felt that the drone understood the training content. In the question of animacy, we confirmed that the training condition tended to score higher than the nonraining condition. This result was attributed to the insect-like impression. We observed high scores for both conditions in this question, and this impression was due to the drone’s noise, which was likened to the buzz of a fly. According to the interviews, the participants cited that the fact that the drone was moving toward objects within the room was why they felt the drone was like a living thing. This aligns with findings from a previous study, 9 which suggested that goal-directedness enhances animacy. We consider that training led participants to perceive the drone as an intelligent animal that recognizes various objects and flies purposefully, rather than moving randomly. Although drone noise was pointed out in this experiment, solutions such as completely covering the drone’s propellers 24 or canceling out the drone’s noise have already been considered, which suggests that this problem could be resolved in the future. In addition, a result of whether participants exhibited hesitation to stop the drone, we confirmed concerns about the drone breaking down in both conditions. However, the scores for feeling sorry for the drone were higher in the training condition. Participants who scored above five on this question (nine participants in the training condition, four participants in the nontraining condition) cited attachment and a sense of closeness to the drone as reasons for their reluctance, with all participants in the training condition and half of the participants in the nontraining condition. We consider that training the drone can enhance positive impressions and potentially inhibit rough handling by inducing feelings of pity for the drone.
In Experiment 2, we could not confirm differences in the scores for the perception of the drone as an intelligent animal or attachment to the drone between the two conditions, and these results did not support Hypothesis 2. The reason for these results can be considered by comparing the participants’ behaviors for driving away/attracting the drone in between Experiments 1 and 2. From the results shown in Figure 6, we found that the drone created a mammal-like impression when the participants attracted the drone, and the drone created an insect-like impression when the participants drove the drone away. In addition, attracting the drone enhanced the participants’ feeling of attachment toward it. According to the interviews, when the participants attracted to the drone, six participants felt that having the drone approach them resembled a dog’s behavior. Therefore, we consider that the act of attracting the drone not only fosters recognition of the drone as an intelligent animal but also enhances attachment to the drone. Furthermore, in Experiment 2, since participants exhibited behaviors of attracting the drone in both conditions, we consider that the attachment to the drone was relatively high, and the drone’s personality did not significantly influence this attachment. In addition, we found that participants felt playing with the drone in the fickle condition was more boring than the sticky condition. According to the interviews, the monotony of the drone’s movement and the fact that they were able to understand the drone’s response pattern during the experiment as reasons for feeling bored. From the analysis of the participants’ behavior, which is shown in Figure 5(b), we found that their exploration time was longer in the sticky condition. Comments from participants in the sticky condition included: “I was curious if the drone had other movements,” “Searching for the rules of the drone’s behavior was fun,” and “I wanted to use other tools to learn more about the drone’s characteristics.” Therefore, we consider that drones that have a sticky personality, which allows for the exploration of play, are less likely to bore users than are drones that have a fickle personality, where the responding musical instrument changes. At question of insect-like impressions, sticky condition scores higher than fickle condition. From the analysis of participants’ behavior, we consider that the sticky condition, which is characterized by the drone spending more time in front of the participants, led to the drone being perceived as more insect like.
Conclusion
In this study, we focused on promoting interactive behavior between users and robots as an approach to fostering attachment to robots that have a nonbiological appearance. Specifically, we applied human–animal interaction to drones, such as an owner attracting the pet or driving the pet away, training the pet, and the pet’s attention shifting during play, and we tested the effects of each in the experiments. The results showed that the attracting behavior gave the subjects a mammal-like impression of the drones, whereas driving the drones away gave them an insect-like impression of the drones. The feeling of attachment was enhanced when the user recognized that the drone was trained. In addition, when users perceived the drone’s personality as fickle, they became satisfied that they knew all the ways to play with the drone, and this led to a monotonous interaction and they got bored of playing with the drone. Additionally, we found that when the drone’s personality was perceived as sticky, encouraging users to explore new ways of interacting with the drone could reduce their boredom.
Behaviors such as attracting the robot, allowing users to recognize the training abilities, and encouraging the exploration of play fostered attachment between users and the robot. These effects were achieved without changing the robot’s appearance. The insights from this study suggest a way to develop robots that, despite being nonliving, can form intimate relationships with users.
Footnotes
Acknowledgment
The authors thank Yuta Watanabe for helping them conduct experiments.
Authors’ Contributions
Y.O.: conceptualization, data curation, formal analysis, funding acquisition, investigation, methodology, visualization, writing—original draft, and writing—review and editing. K.T.: conceptualization, formal analysis, funding acquisition, methodology, writing—original draft, and writing—review and editing. H.N.: conceptualization, formal analysis, funding acquisition, methodology, project administration, resources, supervision, writing—original draft, and writing—review and editing. All authors contributed to the article and approved the submitted version.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
The authors declare that financial support was received for the research, authorship, and/or publication of this article. This work was supported by JSPS KAKENHI Grant Numbers JP19K12081,JP22K12126, JP23K13305, JP24H00151.