
Abstract
A PneuNets actuator consists of a network of interconnected air chambers embedded in an elastomeric substrate attached to a stretch-limiting layer. It is one of the most common soft robotic bending actuators. Despite the versatility of PneuNets actuators in tasks like locomotion and grasping, precise control of their bending motion requires proprioceptive feedback. In this study, we introduce a modular design for integrating a soft sensor into a PneuNets actuator and couple it with a closed-loop control algorithm to achieve proprioceptive feedback. We embedded an off-the-shelf soft capacitive bend sensor into the strain-limiting layer of the actuator to measure angular displacement. Then, we employed a calibrated proportional-integral-derivative controller and tuned it with image-based linearization to accurately control the actuator to follow an input angle trajectory. The proposed approach enhances control precision and promotes modularity, supporting the development of sustainable soft robots with reusable and interchangeable components.
Introduction
Fluidic actuation is one of the most common actuation modalities used in soft robots and has been developed in different configurations. One key development is PneuNets actuators with an embedded network of channels in elastomers. 1 The simplicity and versatility of PneuNets offered researchers a platform for developing new materials and fabrication methods for soft robots. While the compliance of soft materials simplifies the control of soft actuators for various tasks, truly autonomous soft robots require a sense of their own physical state to better interact with their surroundings. 2 To address this challenge, proprioception and exteroception are realized in PneuNets actuators by integrating stretchable sensors comprised of liquid metals, 3 electroluminescent materials, 4 optical waveguides, 5 and embedded fluidic channels. 6 However, these sensorized actuators require specialized materials and advanced fabrication facilities.
We propose a modular proprioception solution for PneuNets actuators to create affordable soft robotics tools using off-the-shelf materials and components. The working principle of PneuNets bending actuators relies on the asymmetrical elongation of two opposite planes with contrasting stiffness around a central network of interconnected pressurized chambers. 1 When inflated, the stiffer layer, known as the strain-limiting layer, restricts the elongation of the softer layer, known as the active layer, and the actuator bends inward to accommodate the differential strain. We harnessed the inextensibility of the strain-limiting layer to devise PneuNets actuators with housing for modular integration of a commercial bend sensor (BendLabs, USA) that simultaneously protects the sensor from overstretching. Then, we devised a proportional—integral—derivative (PID) controller that effectively drives the actuator’s angular position by linearizing the bend sensor feedback with visually tracked angles, facilitating precise closed-loop control.
Materials and Methods
Actuator fabrication
We followed the standard procedure for fabricating PneuNets actuators by casting two types of silicone elastomers into 3D-printed molds.
1
For the active layer, we used a softer silicone elastomer (Ecoflex 00–30, Smooth-On) and for the strain-limiting layer, we used a vinylpolysiloxane with a Shore A32 hardness (Elite Double 32, Zhermack). First, Ecoflex 00–30 was mixed with a 1:1 weight ratio, degassed for 2 minutes using a vacuum chamber (easycomposites DS26-P), poured into the mold, and cured at
For having a modular design, we constructed a strain-limiting layer with an integrated enclosure that can house a sensor inside. For fabrication, a custom mold with a narrow opening that matches the geometry of the bend sensor was created. The resulting part has a cavity with three transversal bands to hold the bend sensor without applying excessive axial force during bending. The mold parts were produced with a stereolithography 3D printer (Formlabs Form 3) using the standard resin (Formlabs White). We mixed the base and the catalyst components of the Elite Double 32 silicone using a 1:1 weight ratio and subsequently degassed the mixture. The prepolymer mixture was then poured directly into the mold and cured in a convection oven at
To assemble the two parts, we applied a thin layer of Ecoflex 00-30 prepolymer to the surface of the strain-limiting layer and gently pressed the active layer against it and let the silicone cure at room temperature (Fig. 1a ii). Next, a hole was made at the end of the actuator using a wooden stick, silicone tubing was inserted, and fixed in place with silicone adhesive (Silpoxy, Smooth-on). Finally, the bend sensor was inserted into the enclosure (Fig. 1a iii-iv) (see Supplementary Video S1).
System architecture
The PneuNets actuator was controlled with a pneumatic system operated through a microcontroller board (Arduino Uno ATmega328P) and a personal computer (Intel Core i7 vPro 1.9 GHz). The pneumatic system operates in two phases for inflation and deflation. The air and vacuum pressure were generated by a micro diaphragm pump (mini air and vacuum pumps VN2708PM). We used two 3-way pneumatic solenoid valves (Parker X-valve, normally-closed) to control the airflow to and from the actuator. Solenoid valve 1 was used for the control of airflow during inflation phase, while solenoid valve 2 is used for the exhaustion. Both pump and valves were powered by a motor driver shield (DFRobot DRI0039) directly mounted on the microcontroller board. An integrated silicon pressure sensor (NXP Semiconductors MPX5100) was installed at the output of the main pneumatic channel to measure the internal pressure of the actuator. The bend sensor (Bend Labs Digital Flex Sensor, 1-Axis) was connected to the microcontroller through an I2C communication port with a bidirectional logic level converter (SparkFun BOB-12009). Silicone tubing (3 mm and 1.5 mm inner diameter) was used to respectively connect the actuator and the pneumatic components (pressure sensor, pumps, and valves) to the system using barbed connectors (Festo RTU-PK-2/3 and Y-PK-3) (Fig. 1b).

Proprioceptive soft actuator.
We chose a bidirectional capacitive sensor made of medical-grade silicone (∼Shore A50 hardness) equipped with an integrated low-power analog frontend and I2C communication (1-Axis Bend Labs Digital Flex Sensor). The sensor outputs the angular displacement Δθ computed from the angle between two vectors tangential to the ends of the sensor. The slender geometry of this sensor allows for easy integration. The sensor has a lifetime of >1M cycles and a linear response with zero drift and produces repeatable (
The firmware uploaded to the microcontroller was compiled in Arduino IDE and is responsible for controlling the pump speed and the state of the valves, acquiring data from the bend sensor and the pressure sensor, and communicating with the central processing unit through a serial port (115200 bps). The frontend software running on the computer is a Python script compiled in Spyder environment. This script generates the input trajectories for the soft actuator and logs sensor output data.
We used a tracking software 7 to trace the tip motion of the actuators from video recordings made with a single lens digital reflex camera (D3400, Nikon) to estimate the bend angle over time.
PID controller
In this work, we applied a PID controller to regulate the input voltage of the pump and activate solenoid valves to adjust the supplied airflow to the actuator in response to the measured bending angle by the sensor. The output of a PID controller is described by the formula:
The controller was calibrated following the Ziegler–Nichols method
8
and then fine-tuned empirically by using a trial-and-error approach. The final values of the tuned PID gains were found to be:
Finally, the control system output is the bend angle of the actuator
Results and Discussion
To ensure the precision of our system, we followed a systematic performance evaluation. Initially, we compared the compliance of the actuator with and without the bend sensor by monitoring the pressure response of the actuator during inflation from
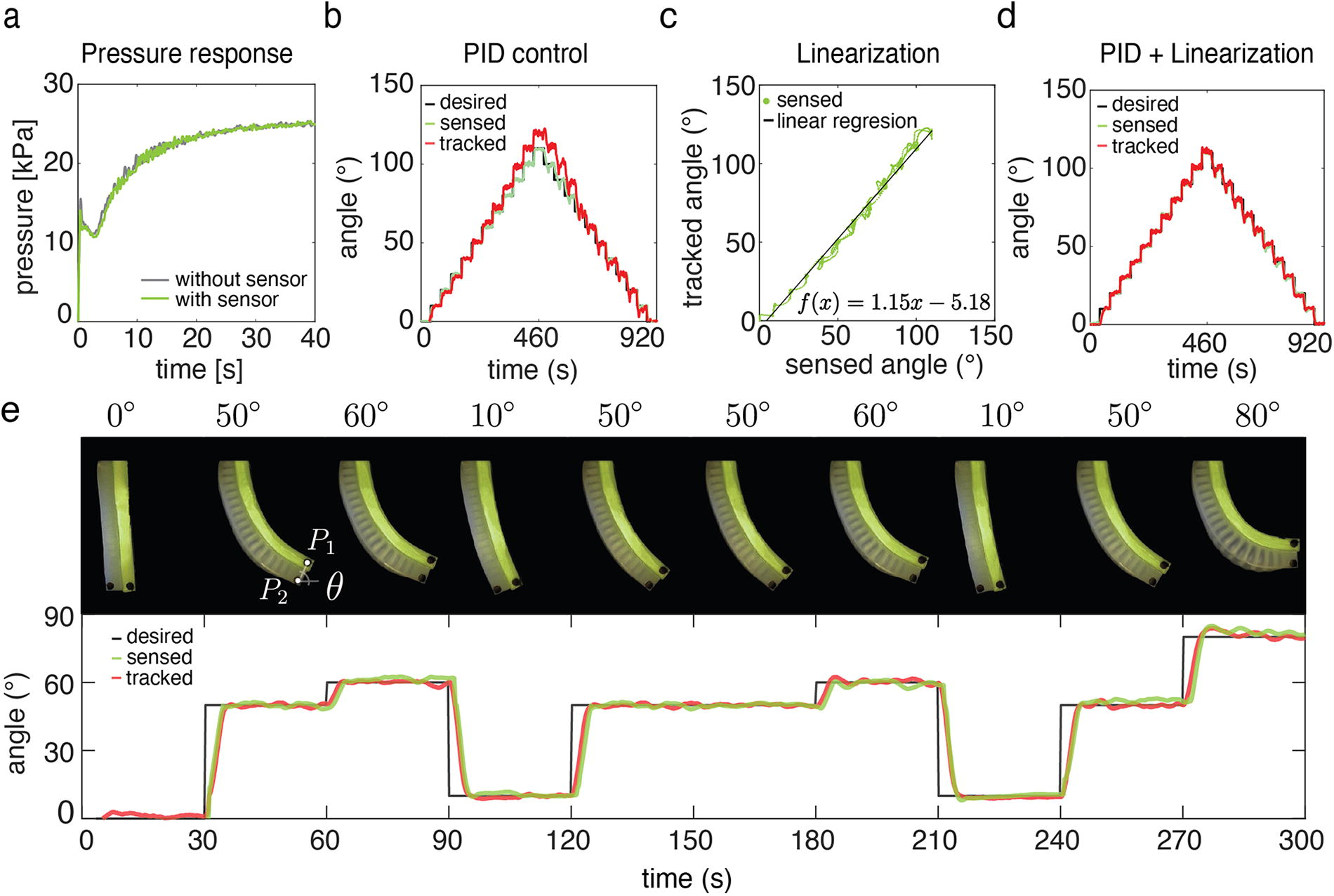
Experimental results.
We logged the filtered angular displacement
To rectify the disparity between sensor
Conclusion
We developed a sensorized soft actuator with integrated modular proprioception as a platform for closed-loop control of soft robots. A capacitive bend sensor was embedded in the strain-limiting layer of a PneuNets soft actuator, while an integrated pressure sensor measured the internal pressure during actuation. A PID controller with a linearization compensation strategy was employed to control the angular displacement of the soft actuator with high repeatability under ramped and arbitrary activation sequences. The work presented here demonstrates an easy-to-implement approach using off-the-shelf components to control soft robots. The control method relies on a purely data-driven approach that utilizes sensor outputs without the analytical description of the system dynamics, which is highly complex due to the nonlinear nature of soft materials and large deformations. The proposed platform is an accessible testbed for developing more advanced control algorithms. 10 Moreover, through a modular design approach, our work contributes towards developing sustainable soft robots with reusable and replaceable components. However, the scalability of our approach may be influenced by the form factors, size, and sensor technology, which may require adjusting the design of the actuator and identifying calibration parameters.
Footnotes
Acknowledgements
The authors thank Colton Ottley and Jared Jonas from Bend Labs for discussions on integration of the bend sensor.
Authors’ Contributions
J.T. and A.R. conceived the research. J.T. and J.M.d.V. conducted the experiments. A.R. supervised the study. J.T. and A.R. wrote the article. All authors discussed the results and reviewed the article.
Data and Code Availability
Author Disclosure Statement
The authors declare no competing interests.
Funding Information
This work was supported by the Maersk Mc-Kinney Moller Institute at the University of Southern Denmark under the Digital Autonomous Production program (SDU I4.0 DAP).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.