
Abstract
Sit-to-stand (STS) and sit-to-walk (STW) are vital daily tasks that affect mobility, independence, fall risk, and quality of life. Therefore, it is important to aid older adults or movement impaired individuals in performing sitting to standing transitions. As such, wearable soft robotic exosuits hold potential in assisting these movements as they can overcome the limitations posed by traditional mechanical exoskeletons. Soft exosuits work in parallel with user’s muscles, are lightweight, compliant, comfortable, and can provide variable stiffness and torque actuation. This reduces the metabolic cost of movement along with the risk of joint misalignment and musculoskeletal injury, as commonly experienced with exoskeletons. Hence, this review aims to provide an overview of the existing and recent soft robotic exosuits that aid STS and STW transitions. A general description of each device is presented while categorizing the exosuits as active and passive, and subdividing as expansive, tensile, and hybrid based on their actuation technology. The core technologies governing soft exosuits are discussed with focus on the physical human–robot interface (HRI), actuation methods, sensors, movement intention detection, and control architecture. The benefits and limitations of each type of exosuit are presented along with future prospectives and areas of improvement for these core technologies. This includes maximizing HRI stiffness while maintaining comfort and designing high hip and knee torque actuators to meet the requirements of STS and STW. Additionally, early and autonomous intention detection should be explored with advanced mid-level control architectures for estimating user-targeted joint torques, based on movement phases, execution strategies, anthropometry, and biomechanics.
Introduction
By 2050, the world’s population above the age of 60 is projected to double and reach 2.1 billion, which indicates a significant increase in older adults. 1 With aging, fall risk increases posing a challenge to the health and well-being of the elderly. It is more pronounced during critical weight-bearing activities of daily living (ADLs) such as sit-to-stand (STS) or sit-to-walk (STW), which are performed about 60 times daily. 2 As the ability to perform these transitions deteriorate with age or movement impairment, individuals can face physical, psychological, and emotional degradation, coupled with an increased fall risk. 3 Therefore, it is necessary to assist older adults or impaired individuals, which would reduce fall risk, improve independence, mobility, and thus, their quality of life.
A range of assistive devices exist for impaired individuals, for general assistance or in rehabilitation given a certain amount of muscle function is retained. The most common are passive mobility aids such as walkers or canes, yet a few were designed to provide lift assistance such as the pneumatically driven robotic cane for STS. 4 However, with the recent improvements in technology wearable assistive devices such as exosuits and exoskeletons are becoming relevant.5–8 Compared with mobility aids, wearable assistive devices can supply assistive torque across the body to compensate for the lack of muscle strength due to aging or impairment (for example, muscle degradation or spinal cord injury). The benefit of these devices is that they can infer the user’s movement and provide assistance as needed, which not only supports the user but also compensates for loss of balance and drives the individual through the motion. 9 Additionally, different movement phases or execution strategies can be accounted for while adapting to the user’s chosen movement style and providing targeted assistance as a personalized aid. 10 The two current designs of wearable assistive devices are mechanical exoskeletons and soft robotic exosuits.
Considering exoskeletons, a few focused on assisting STS and STW, such as the BioKEX-II by Liu et al., 5 the powered knee exoskeleton presented by Shepherd and Rouse, 6 and the HAL-5 LB Type-C by Cyberdyne Inc., Japan. 11 These active exoskeletons target hip and knee extension assistance as they are the primary joints involved in standing, 12 with some being commercially available for purchase. They use high-powered DC motors and transfer force to the body through mechanical linkages, generating the large joint torques required for STS.5,6 Most exoskeletons hold their own weight due to their mechanical structure and can also support paraplegic patients or amputees. 11 However, exoskeletons can be restrictive for the user as their mechanical linkages need to follow the complex motions of the human body. This confines a user to follow the machine’s defined trajectory rather than employing their natural movement biomechanics, leading to joint misalignment and musculoskeletal injury.7,9 Additionally, exoskeletons are bulky and heavy which produces a larger inertia for the body to overcome in motion. This increases metabolic cost and may be uncomfortable for daily use.9,13 Furthermore, most exoskeletons are not inconspicuous and may create self-consciousness, such that users may not feel psychologically comfortable to wear the device. 14
To that end, soft robotic exosuits have significant potential as they can overcome the limitations of mechanical exoskeletons. A soft exosuit is defined as a wearable clothing-like robot that works in parallel with the user’s muscles, does not contain any rigid load-bearing elements, and can support compressive loads across the joints.9,15 Exosuits are commonly made of textile and elastomer based materials and can mimic biological musculoskeletal systems to aid individuals by compensating for lack of muscle function. 10 They are compliant, thereby allowing natural movement biomechanics and strategies to be used without constraint, which reduces the risk of musculoskeletal injury and promotes comfort. Soft exosuits are also lightweight, portable, and can be worn under clothing. 7 However, exosuits cannot support a user’s weight and are not always suitable for individuals with total loss of muscle function. 16 They also struggle to produce large joint torques due to their flexibility and the low stiffness of their physical interface, leading to a trade-off between power and compliance. 17
Despite these current limitations, soft exosuits hold great potential in rehabilitation and in providing movement assistance. Exosuits have been proposed for assisting gait,9,18 upper body movements, 19 and even neuromusculoskeletal diseases such as foot drop; 20 for older adults or impaired individuals. Moreover, exosuits were also developed for ankle assistance such as the commercially available ReStoreTM by ReWalk Robotics, USA, which aids propulsion and ground clearance tasks through plantar flexion and dorsiflexion for stroke patients. 21 This review focuses on soft exosuits for STS and STW transitions as they are vital ADLs that contribute to independence and mobility. In the following sections a general overview of the recent and existing exosuits are presented, followed by their core technologies such as (1) actuation methods, (2) physical human–robot interface (HRI), (3) sensors and intention detection, and (4) control architecture.
Methods
Scopus and PubMed databases were searched for scientific publications involving soft exosuits that assist STS and STW transitions (Fig. 1). The primary search string and keywords used were: “(sit-to-stand OR sit-to-walk) AND ((soft AND robotic AND exosuit) OR (soft AND orthosis) OR (soft AND assistive AND device) OR (soft AND exoskeleton))” and resulted in 562 articles. Literature was shortlisted based on the title, abstract, and keywords, where the inclusion criteria were soft robotic exosuits specifically designed for or tested on STS or STW movements. The exclusion criteria were articles containing solely mechanical rigid exoskeleton assistive devices, non-soft robotic devices, mobility aids, general soft robotic concepts, and devices for alternate motions such as gait or stair ascent/decent. Additionally, studies only considering the sitting test (exosuit does not impede correct sitting posture), were not accounted for in this review.

Number of articles identified for review on soft robotic exosuits to aid sit-to-walk (STW) and sit-to-stand (STS) transitions.
Major Findings
Exosuits can be categorized as active or passive with some having a combination of both active and passive elements, as listed in Table 1. Active exosuits have an external power supply which drives an actuator to generate assistive joint torque. They actively support the musculoskeletal system and mimic plus work in parallel with the user’s muscles. Based on their actuation, active exosuits are subdivided as tensile or expansive.17,33 Alternatively, passive exosuits mirror ligaments/muscles and do not use external power supplies or actuators. Instead, they primarily rely on elastic elements to store and transfer energy through the body based on movement or gravity.7,33 Hybrid exosuits have a combination of an exoskeleton’s rigid structure with soft robotic elements.10,38 Each exosuit category has its own advantages and disadvantages, with an overview presented in Table 2 and further discussed in the following sections.
Overview of Exosuits That Assist Standing Transitions
Overview of Advantages and Disadvantages of the Exosuit Categories
Passive exosuits
Passive exosuits (Fig. 2) are lightweight, compliant, comfortable, and inconspicuous as they can be worn under clothing and help conceal disability. These textile or clothing exosuits comprise elastic bands or springs which stretch and store energy when the user sits down, and then releases this energy as assistive force upon standing. They closely follow the muscle structure of an individual and can also be integrated with active devices for improved assistance.13,16

Examples of passive exosuits with elastic elements.
Lee at al. 16 designed the X-tights, which primarily aids the knee extension torque requirements of STS/STW. This polyester exosuit weighed only 0.3 kg and used stitched-in elastic bands for energy storage and transfer. The bands were routed in front of the knee in an X-shape, with anchor points at the buttocks and calf. To avoid discomfort caused by concentrated pressure, a silicon pad was inserted across the patella. The optimal routing path was chosen based on the anatomical design of the knee extensor muscles (quadriceps) and the deformation of the skin for maximum stretching when sitting down. Skin deformation was tracked using an optical motion capture system, while elastic band stiffness was chosen experimentally to prevent slipping, maintain comfort, and store sufficient energy during sitting (without overcoming gravity). The maximum band stiffness was set at 470 N/m with a maximum knee assistive torque of 0.03 Nm/kg. The study tested the device for STS across 31 subjects and found a statistically significant decrease in metabolic power (3.2 ± 1.5%) with the exosuit, but no significant change in muscle activity.
Lindermann et al. 13 tested a commercially available soft exosuit called Rakunie RK2, Morita Group, Japan, for STS. This exosuit is clipped in place using a chest strap and contains elastic bands, which are routed across the back, buttocks, thighs, and is then fixed below the knee using Velcro. The intensity/stiffness of the elastic bands was scaled experimentally for each subject until a clear tension was felt while standing. This study used the peak angular velocity (PAV) of the thigh to quantify exosuit assistance and tested it on 21 older adults. When rising from a bed and a chair with armrests, the median PAV showed a statistically significant increase without and with the exosuit; from 79.7°/s to 92.6°/s and from 77.8°/s to 92.9°/s, respectively. However, no significant difference was found while rising from a chair without armrests. The increasing PAV shows that the exosuit can support individuals in STS, typically when using arm movements to push off or generate forward momentum.
Following this, Pouwels 24 proposed a concept with an initial prototype for a body fitting soft 3D printed knee brace to assist older adults during STS. The knee brace consists of a hard outer shell and inner Thermoplastic Polyurethane (TPU) padding with thigh and shank segments, connected via a hinge and an incorporated spring. It was targeted to lift 10–40% of a user’s bodyweight with respective spring constants from 1.76 to 7.02 N/mm. The body segments are made of a rib and honeycomb structure, where the ribs help evenly distribute the assistive force from the hinge over the back of the leg; while the honeycomb pattern provides flexibility (allows for muscle deformation), temperature control, reduces weight, pressure on the skin, and a good strength-to-weight ratio. Velcro bands were also used as fasteners to strap the brace onto the user’s leg while internal space was allocated for the sensors. To minimize the force when seated, a locking mechanism was added to the hinge and can be released by posterior foot movement. Knee extension assistance is provided during STS and the device then enters transparent operation allowing for unconstrained gait.
Wendt et al. 22 developed a textile-based functional undergarment for trunk and hip extension with knee flexion assistance during STS. The base material was designed using knitted fabric with 80% polyester and 20% elastane where the functional elements were elastic drawstrings comprising Velcro, polyester, nylon, and natural rubber. The drawstrings were routed through the areas of the body that showed the greatest deformation during sitting, which was found through body surface imaging via Move 4D, Spain. The exosuit was tested on a single older adult (above 65 years) and a healthy young adult for comparison. Muscle activity was measured with and without the exosuit to quantify assistance and the study showed 6–40% savings thereafter. Furthermore, Lamers and Zelik 23 introduced a passive dual-model exosuit with an extension mechanism to support trunk and hip extension. The 1.5 kg exosuit comprised shoulder straps, a waist belt, and conical fabric leg sleeves to transmit force and prevent upward slippage when standing. The extension mechanism was made of two 3D printed flaps with a hinge-lever design, anchored to the waist belt, while two elastic bands (fabric elastic sewn with nonstretchable polyester webbing) were routed through it and the HRI. When the user bends, the flaps rotate and lock to add a spacer between the lower back and elastic bands. This stretches the bands, increases the moment-arm and thus the magnitude of torque assistance about the L5–S1 joint, without increasing shear and device-to-body forces. The exosuit was tested on a single subject during object lifting motions and can be extended for STS transitions. As such, the peak assistive torque and trunk force recorded were 17.2 ± 0.5 Nm and 159 ± 6 N, respectively.
Expansive exosuits
Expansive exosuits (Fig. 3) are active devices actuated using positive or negative pressure, and traditionally rely on pneumatic artificial muscles (PAMs) or pneumatic inference actuators (PIAs) to provide hip and knee extension torque, for STS and STW transfers. PAMs/PIAs also provide variable stiffness actuation which changes their stiffness (like human muscles) based on air pressure, to better respond to changes in environment during motion and match the performed task.27,28

Thalman and Lee 28 proposed a variable stiffness soft robotic ankle–foot orthosis (SR-AFO) that supports the inversion/eversion of the ankle to prevent buckling (ankle sprains), with minimal hindrance to plantar flexion and dorsiflexion stiffness. Fabric-based TPU PAMs with a hollow cylinder design were attached vertically on the sides of the ankle, from the talus to the medial/lateral malleolus. These were placed in heat-sealed rectangular pouches which were folded in two and sewn to form a loop, such that upon actuation the PAMs expand inward to fill the negative space of the loop, providing variable stiffness. The actuators were anchored to a neoprene fabric exosuit which could then be worn over a shoe. The study tested the orthosis on six healthy young adults during sitting and standing tasks and found an increase in stiffness when standing. The SR-AFO achieved a maximum ankle eversion stiffness of 84.9 Nm/rad at 50 kPa, which is a significant increase from the free-foot stiffness. Additionally, it could modulate eversion stiffness from 20–70 Nm/rad at pressures less than 30 kPa, when standing.
With this, high knee extension torque exosuits were also proposed, with actuators placed posterior to the knee (popliteal fossa), to account for the large knee torque requirement during STS. Veale et al. 17 designed the soft lift assister for the knee (SLAK) using PIAs, fabricated from reinforced rubber tubes. It was made up of three PIAs, each containing a pleat to increase output torque. The pleat had two valley folds, a mountain fold, and an antikink cord to prevent the air flow from choking during actuation. The exosuit was attached to the leg using Velcro straps and buckles through a base layer, while the PIAs were inserted through a sleeve layer and the pleats were introduced through a constraint layer, all stitched together. The SLAK generated a maximum knee extension torque of 324 Nm at a knee angle of 82° and pressure of 350 kPa. The device was proposed for paraplegic patients however, was not tested on human subjects, rather on a test bench with an artificial leg. Similarly, Sridar et al. 27 proposed a knee extension exosuit for gait assistance in stroke patients but also tested it on STW transitions. The circular PIA was designed using heat-sealed TPU and encased in fabric. It was inserted into the exosuit using a neoprene sleeve and secured to the leg using hook and loop straps. During sitting, the actuator is bent behind the knee, and upon actuation changes stiffness and straightens to generate knee extension torque. The exosuit generated a maximum torque of 22 Nm and was tested on three poststroke patients, via the timed-up-and-go (TUG) test. TUG timings showed an average decrease of 10.47% across the subjects while wearing the exosuit, indicating improvement in functional mobility.
Building on pleated PIAs, Diteesawat et al. 26 proposed bubble artificial muscles (BAMs), which produce high contraction and tensile force, is lightweight, and scalable. A single BAM contractile unit was made of a polyethene plastic tube with circular metal retaining rings on either side. The plastic tubing is nonuniformly folded in the axial direction (like pleats in a pleated PIA), such that upon pressurization the BAM unfolds and expands radially producing axial contraction force. As pressure increases, it moves from a circular to an elliptical shape (optimal contraction), after which it undergoes plastic deformation. The material thickness (tubing and rings), ring radius, unit length, and fold length can be modulated for different levels of contraction and tension. As such, this was tested on a three-link mechanical structure with revolute joints representing the ankle, knee, and hip, in STS. Three BAM actuators were attached parallelly to shank and thigh links, each with seven contractile units in series. From this experiment, each BAM produced 56.9 N of tensile force at a pressure of 50 kPa. Moreover, Kulasekera et al. 29 developed a low-profile vacuum-actuated muscle-inspired pneumatic structure for hip extension assistance. It consisted of a low-profile helical spring encased in a thermally sealed low-density polyethylene (LDPE) film and placed parallel to the Gluteus Maximus. When actuated from an offboard vacuum pump the film collapses producing rapid axial contraction with passive spring return. The exosuit contained a waist anchoring belt and thigh supports with Velcro straps, giving a total weight of 0.3 kg. It generated a high force-to-weight ratio of 160 and was tested on three healthy adults during STS, with a 46% reduction in Gluteus Maximus muscle activity.
Govin et al. 30 presented a back orthosis that stabilizes the lumbosacral spine, allowing users to reach an upright position and maintain correct posture when standing. Pneumatic bladders made from heat-sealed plastic sheets and encased in fabric pouches were attached parallelly on either side of the spine, and then on the waist in a vertically cascaded design with reducing radius. When actuated, the bladders inflate but are constrained by the fabric pouches which causes them to straighten with increased stiffness. The side bladders resist thoracic motion and the waist bladders form a wedge which produces lifting and squeezing to support the lumbosacral spine. The bladders were attached to a soft harness which sits on the shoulders, waist, and anchors to the legs to minimize upward slippage. The exosuit was tested on a single subject during STS and weightlifting motions, and supported straightening the back and moving to an upright position. The muscle activity of the erector spinae was measured with a 62.2% reduction after donning the orthosis. Likewise, Zhu et al. 25 proposed an exosuit to control and stabilize the lumbar spine during sitting, standing, and lifting motions, using a hydraulic artificial muscle and a fluid pressure based soft knitting sensor to detect incorrect posture. The exosuit is made of nylon, wrapped around the thighs, pelvis, and chest with shoulder straps, while the actuator is placed parallel to the spine. The knitted/interconnected fabric structure of the sensor creates multiple short sensing elements with direct body contact and precise detection of pressure changes. The sensor detects strains and spinal curvature, which informs the artificial muscle for generating a compressive force, mimicking the erector spinae to correct a user’s posture. The actuator itself is designed from microtubes and helical coils with syringes for transferring hydraulic pressure. Zhu et al. 25 tested the exosuit on four subjects and noted a 20% change in length for the artificial muscle, with 35 N of force for a hydraulic volume of 10 mL.
Tensile exosuits
Tensile exosuits (Fig. 4) use Bowden cables or artificial tendons which are anchored and routed across the body, typically following muscle paths. These active exosuits are traditionally actuated using DC motors which tension the cables; yet certain studies have also investigated shape memory alloys, but with focus on upper body motion. 19 Based on cable routing, tensile exosuits allow multiple joints to be assisted simultaneously using a single actuating element, thereby supporting multiarticular actuation like muscles.7,34

Bartenbach et al. 34 proposed a concept for a multiarticular tensile exosuit to aid lower limb joints during STS and stair ascent/decent. The study recognized the large hip and knee extension torque requirements during STS and suggested that exosuits should aid 30–50% of joint torques in an individual. Their design was a textile suit with webbing segments as anchor points for the Bowden cables. Two anchors were suggested at the hip and shank with cables routed posterior to the thigh (Gluteus Maximus and hamstrings) and anterior to the knee (quadriceps), to aid hip and knee extension. Upon actuation the cables are tensioned, pulling the webbing segments together and applying assistive force based around the anchors. Additionally, the study suggested a knee module to increase the knee lever arm, help route the Bowden cables, and shield the knee.
Building on this, Schmidt et al., 33 developed a biarticular, anti-gravity assistance exosuit named the Myosuit, to aid the hip and knee during STS, STW, and gait. The Myosuit has a three-layer architecture comprising garment, ligament, and power layers. The garment layer consists of the textile suit made up of spandex pants, a waist belt, thigh cuffs, and webbing for tendon anchor points. The ligament layer contains passive, adjustable strength rubber bands, which store energy and assist during movement. They are attached anteriorly from the waist to the thigh and posteriorly along the shank for antagonistic hip and knee flexion assistance. The power layer consisted of two DC motor-operated tendon actuators placed distally on each shank. The cable sheaths were sewn into the garment and routed across the knee, anterior thigh, and then posterior waist, with a medial and lateral tendon for each leg. Upon actuation, the Bowden cables wrap around the motor shaft (via a pulley system) to tension and assist the Gluteus Maximus, hamstrings, and quadriceps for hip and knee extension. The Myosuit weighed 4.6 kg, had an operation time of four hours, and generated a maximum force of 435 N at an 80° knee angle. It was tested on a single healthy adult and produced 26% of natural knee moment and 35% of knee power. The Gluteus Maximus showed a general decrease in muscle activity with the exosuit; however, no significant change was observed in the Vastus Lateralis.
Similarly, Park et al. 32 also proposed an antigravity extension exosuit focusing on STS and stair ascent/descent. The exosuit was designed using seatbelt material for high stiffness and low hysteresis, along with foam padding to minimize slipping. It consisted of foot straps attached to a knee pad and anterior V-shaped thigh straps passing posterior to the leg and attaching to a waist belt. A control unit with DC motors was attached at the waist and actuated the tendons via pulleys for hip and knee extension assistance. Each tendon was routed anteriorly to the thigh through a transfer mechanism and anchored to a moveable pulley in the knee pad. The thigh transfer mechanism consisted of a fixed track and slider attached to the outer sheath of the tendon, while the inner cable connects to the moveable pulley and a second tendon is back-connected from the pulley to the thigh cuff. When actuated, the cable retracts causing the thigh slider to move downward for hip extension and pulls the knee pulley upward along with the back-connected tendon for knee extension. Overall, the exosuit was characterized to produce a maximum hip and knee extension force of approximately 100 N and 75 N, respectively; however, was not tested on a human subject. Equivalently, Park et al. 35 designed a single leg knee extension assistance exosuit that contains shoulder straps for transferring force to indirectly aid hip flexion during STS. The DC motors and Bowden cables were housed in a backpack with the Bowden sheath attached to the upper anchor, and the inner cable routed through a thigh belt over the knee and attached to the foot. On actuation, the knee is pulled in extension and the same torque is transferred through the upper body HRI to aid hip flexion. However, in practice, the friction between the chair and upper HRI minimizes hip assistance. The exosuit was tested on a single subject with 61% reduction in average muscle activity of the Vastus Medialis.
Moreover, Lear et al. 31 patented an exosuit design with possible patch assemblies and detailed its embodiments. It had a four-layer architecture with (1) base, (2) stability, (3) power, and (4) a sensor and control layer. The base layer forms the wearable suit from the shoulders to above the knees. It contains flexible spandex panels with inextensible load distribution members to transfer assistive force. The stability layer provides passive assistance using elastic elements integrated into the base layer. A certain embodiment described the power layer interfacing with the stability layer to engage/disengage or pretension the elastic elements. Next, the power layer incorporated twisted string actuators (TSAs) with electromechanical clutching to provide active STW assistance, focusing on spinal extension and hip flexion/extension. The TSAs are motor driven with input and output pulleys, to drive and twist the actuating strings, respectively. They are pretwisted for immediate support and are routed along the back of the torso and legs, mimicking extensor muscle positions. Hip flexion assists trunk lean, while spinal and hip extension assist upward motion during standing. The actuators are then slacked to allow transparent motion during gait or subsequent tasks.
Hybrid exosuits
Hybrid devices (Fig. 5) are mechanical exoskeletons with soft robotic elements. They may use flexible load-bearing support frames to allow unconstrained motion or include exoskeleton devices with soft robotic actuators. This allows the exosuit to bear its own weight and effectively supply assistive torque, while providing compliance and variable stiffness/torque actuation.10,39

Examples of hybrid exosuits, where
Kimura et al. 10 developed a straight fiber-type PAM with an antagonistic pull spring, in a knee exoskeleton for STS assistance. The PAM was designed using cylindrical rubber tubes with axially placed carbon fibers inside the tube (to prevent axial expansion) and three circular rings around it, to control the level of contraction and force generated. When pressurized, the PAM expands radially, thereby contracting axially and generating axial force, whereas changing air pressure affects the elastic modulus of the muscle providing variable torque and stiffness. The PAM was placed in parallel with an antagonistic mechanical spring (stiffness of 4900N/m) routed through a pulley and housed at the shank. A thigh and ankle brace were used to secure the exoskeleton to the user, while the pulley was aligned with the knee joint center. An external air compressor was used and the total weight of the device was 3.1 kg. From this, the exoskeleton generated a maximum output torque of 20 Nm at a knee angle of 90° and a pressure of 300 kPa. Three healthy adults tested the device during STS and a maximum reduction of 50% in Vastus Medialis muscle activity was observed.
Similarly, Lee et al. 38 designed the Samsung walking assist (S-Assist) for hip and knee assistance. It was designed to be worn under baggy clothing (inconspicuous) with a maximum 35 mm bulge height and a weight of 14.5 kg. The flexible exoskeleton was made up of a buckle-free support frame via links connected in series and attached to the thigh and shank. The links allow the frame to bend and follow the body’s natural curvature. Following this, a three degrees of freedom (DOF) hip, one DOF knee, and three DOF ankle anthropomorphic joints were designed to minimize the difference between the user’s movement and the exoskeleton’s allowable motion trajectory (kinematic dissimilarity). The hip joint consisted of a passive waist belt with a sliding mechanism that allowed hip abduction/adduction and mediolateral movement, along with an active joint for flexion/extension. The knee contained an active rolling joint for flexion/extension assistance with an independent self-aligning coupling (using four pulleys) to prevent musculoskeletal misalignment and injury. Finally, the ankle contained a passive remote center motion mechanism for inversion/eversion and a revolute joint for plantar flexion/dorsiflexion. The S-Assist was tendon-actuated using DC motors, housed in a backpack along with the control unit. It produced a maximum torque of 20 Nm for hip and knee joints individually, with an operation time of 60 minutes.
Additionally, Furukawa et al. 36 presented a carbon fiber knee assistive device with a back-drivable PAM housed in a tubular carbon exoskeleton. The exosuit weighed 810 g (excluding an air compressor, battery, and control systems), and generated a maximum torque of 52 Nm. A positive-unlabeled (PU) classifier was used to selectively identify motion intent for STS transitions and provide extension assistance, while supporting gravity compensation during other movements. The exoskeleton used a foot pressure–force model to follow a desired torque trajectory with a root mean square error of 1.86–1.58 Nm based on the sampling frequency. Following this, Zheng et al. 37 discussed the operation of a semi-wearable STS aid, which consists of a low-cost double acting pneumatic cylinder attached to the lower limbs for lift assistance. The cylinder is configured in an inverted crank-slider mechanism to a foot plate, shank bar with an ankle joint, and a thigh plate with a knee joint. The user rests on the thigh plate and during actuation is provided lift assistance based on preset operation modes for the STS movement phases. The device was tested on five subjects and showcased an 18–30% reduction in quadriceps muscle activity, with joint torque up to 30 Nm. The STS assist could also be detached after standing and used a carbon fiber air tank as a portable air supply.
Moreover, Baiden and Ivlev, 39 proposed a two DOF (flexion/extension) exoskeleton for knee and ankle assistance using antagonistic rotary elastic chambers (RECs). The exoskeleton was designed for repetitive STS transitions in rehabilitation, for poststroke hemiplegic patients. Pneumatic RECs have two antagonistic chambers which inflate upon actuation to produce linear motion. This is followed by a mechanical coupling that produces rotary motion and assistive joint torque in both agonist and antagonistic directions. Therefore, RECs can serve as an alternate soft robotic actuator to DC motors. This hybrid orthosis was tested on a single subject performing STS, producing greater than 20 Nm of torque at pressures less than 400 kPa.
Core Technologies
Actuation
Passive exosuits rely on elastic elements such as rubber bands or springs for actuation (Fig. 6). 24 For STS, they store energy when a user sits down and releases it as assistive force upon standing. These elastic elements are placed following hip and knee extensor muscles and by observing the maximum skin deformation through motion capture. 16 The advantages of passive actuators are that no external power supply is required, they can be integrated with active exosuits, and can be worn under clothing with quick don/doff times (time taken to wear and remove the exosuit). 7 However, they produce limited assistive power and while the stiffness or moment-arm of the elastic bands can be modulated, user-specific joint torque based on movement biomechanics or strategies cannot be provided.10,23 Additionally, greater stiffness would produce greater assistance, but would require greater anchoring forces leading to a compromise between comfort and assistance.16,22

Examples of different soft robotic actuation technologies from recent exosuits.
Alternatively, active exosuits rely on PAMs or tendon actuators with DC motors (Fig. 6). PAMs were initially developed using McKibben muscles, which are designed using an elastomer based inner tube and an outer braided mesh shell. When pressurized, the inner tube expands but is constrained by the outer shell resulting in radial expansion and axial contraction to generate axial force. 40 The exosuits presented in this review use variations of the McKibben muscles such as the straight fiber-type PAM. 10 Alternatively, a vacuum-actuated PAM was also presented which uses negative pressure to produce rapid axial contraction with spring return. 29 Comparatively, hydraulic filament artificial muscles were also proposed to correct movement posture. They comprise microtubes and coils that elongate when pressurized and then produce compressive force when released, based on the stored potential energy. 25 With this, PIA’s buckling regions generate torque, where increasing the number of buckling regions increase the torque that can be generated. Therefore, pleated PIAs 17 and BAMs 26 introduced more buckling regions through pleats or folds to increase the output torque generation. Artificial muscles are usually connected in an agonist/antagonistic configuration and provide variable stiffness and torque like biological muscles, allowing them to adapt to the environment and task being performed. Due to their elastomeric nature, by changing air pressure the PAMs straighten and stiffen, which provides both extension torque for STS 27 and supports correct posture and balance.28,30
PAMs are lightweight, flexible, comfortable to wear, have high power density, high power-to-weight ratio, and work in parallel with a user’s muscles.17,26 They can generate a larger joint torque than tendon actuators and can be characterized based on their stiffness and joint angle–torque relationship. 10 However, PAMs have high nonlinearity such as hysteresis, which introduces modeling inaccuracies and complexity in tuning controllers. 7 Additionally, PAMs require external compressed air or vacuum sources which cannot be mounted on an exosuit. Due to this, they are tethered devices and applicable for use in laboratories (rehabilitation) but are not completely portable.17,29
Tensile exosuits for STS comprise Bowden cables or TSAs, actuated using DC motors. 31 The cables are attached at anchor points along the body and wrap around the motor shaft typically via a pulley mechanism. When retracted, the cables tension and pull the anchor points together, producing multi-articular assistance simultaneously based on cable routing. 34 For STS/STW tasks, upon actuation, the outer sheath produces a compressive force which can be utilized for antagonistic assistance and the inner cable produces a tensile force for hip and knee extension.32,35
The benefit of tensile exosuits is that they use DC motors for operation which have well-established modeling and control methods throughout literature. 7 They can be self-contained (portable and battery operated) and actuators can be housed away from the joints at the body center of mass (COM), which minimizes the impact on inertia and the metabolic cost of movement.7,31,33 Tensile exosuits are flexible, lightweight, and less bulky than PAMs, so can be worn and concealed under clothing. Additionally, Bowden cables can be pretensioned for immediate assistance or slacked to provide transparent motion.15,33 However, due to their level of compliance there are high shear forces on the skin, losses due to friction between the cable and its sheath, and skin deformation when the anchor points are tensioned. Moreover, cable slipping and backlash can occur which reduces control accuracy and further contributes to mechanical inefficiency, resulting in lower assistive torque. 7 Yet, shear forces and slippage can be minimized with external webbing placed on the anchor points to transmit normal forces to the skin, while appropriate control architectures can be implemented to account for nonlinear behavior such as hysteresis. 33
Physical human–robot interface
The physical HRI consists of the wearable textile suit that transfers assistive force from the actuators to the user, also referred to as the base or garment layer. It may consist of waist belts, pants, thigh and ankle cuffs, foot attachments, fabric pouches for inserting PAMs, and external webbing for anchor points in tensile exosuits. Soft and elastic materials such as spandex, nylon, polyester, knitted fabric, and 3D printed TPU are used for this purpose.17,22,24,33
The two key specifications for the physical HRI are maximizing the human-suit series stiffness and maintaining comfort. 9 For cable-driven exosuits, a high human-suit stiffness ensures efficient transfer of power to the user with minimal shear force, slippage, and skin deformation. This depends on factors such as maximizing the contact area between the suit and skin with choosing appropriate materials for garments. 9 For STS, appropriate anchor points should also be selected targeting bone landmarks to promote normal forces to the body such as the waist (hip), knee, and foot (ankle) for hip and knee extension. 34
Optimal cable routing also contributes to stiffness. Artificial tendons are routed along muscle paths, focusing on the Gluteus Maximus and hamstrings (posterior waist and thigh) for hip extension and along the quadriceps (anterior thigh) for knee extension.32,33 While low stiffness garments have better comfort and are easier to don/doff, they lead to greater shear forces and misalignment which can lead to pain and irritation.7,33,34 Depending on the body segment, healthy adults have an average comfort limit of 620-870 N for a pulling force; and can tolerate larger forces for a short duration. 41 Therefore, a compromise between stiffness and comfort should be maintained. This is minimal for expansive exosuits as majority were developed as cuffs worn at the joints for direct extension assistance.17,27,28
Sensors and intention detection
A variety of sensors are used for data collection, monitoring, intention detection, and operation of control systems. Expansive exosuits use air pressure sensors and load cells to measure the pressure at the PAM with the actuation force or joint torque produced. Pressure regulators and solenoid valves were also employed to control actuation pressure.17,26 Tensile exosuits employ encoders, potentiometers, and load cells to derive tendon length, rotation, torque, and force.31,33 Hydraulic pressure sensors like the soft knitted sensor were used to detect spinal curvature based on correlations between pressure change and specific postural variations. 25 Moreover, multiple studies used inertial measurement units (IMUs) to measure body kinematics and derive joint angles for intention detection, low-level control or for use with the joint torque–angle relationship. 17 With this, force plates and optical motion capture systems were used to track body kinetics and kinematics, along with surface electromyography (SEMG) sensors to measure muscle activity of the lower limbs. SEMG also provides methods of quantifying STS/STW assistance with and without the exosuit.10,16,22,29,30,33 Furthermore, the Myosuit also facilitated a Bluetooth connection to an external computer to log sensor data such as joint angles, encoder counts, and IMU readings. 33
Active exosuits used intention detection, which forms the high-level control architecture and infers the user’s intent to perform STS or STW motions, thereby triggering assistance. This can also be used to change the operation mode of the exosuit, for example, to a transparent mode during gait after STW is completed.27,31,33 Kimura et al. 10 used a user-operated switch to trigger the exoskeleton and change the mode of assistance from sitting, slouching, and standing during STS (Fig. 7). This manual method provides easy intention detection, however, may be inconvenient and delays assistance as it is dependent on the user’s reaction time and observation of their movement. Next, Sridar et al. 27 used force sensors placed in a smart shoe insole to measure ground reaction forces (GRFs) for intention detection. This was performed based on individualized movement timings and when GRFs reached predefined percentages of a subject’s bodyweight.
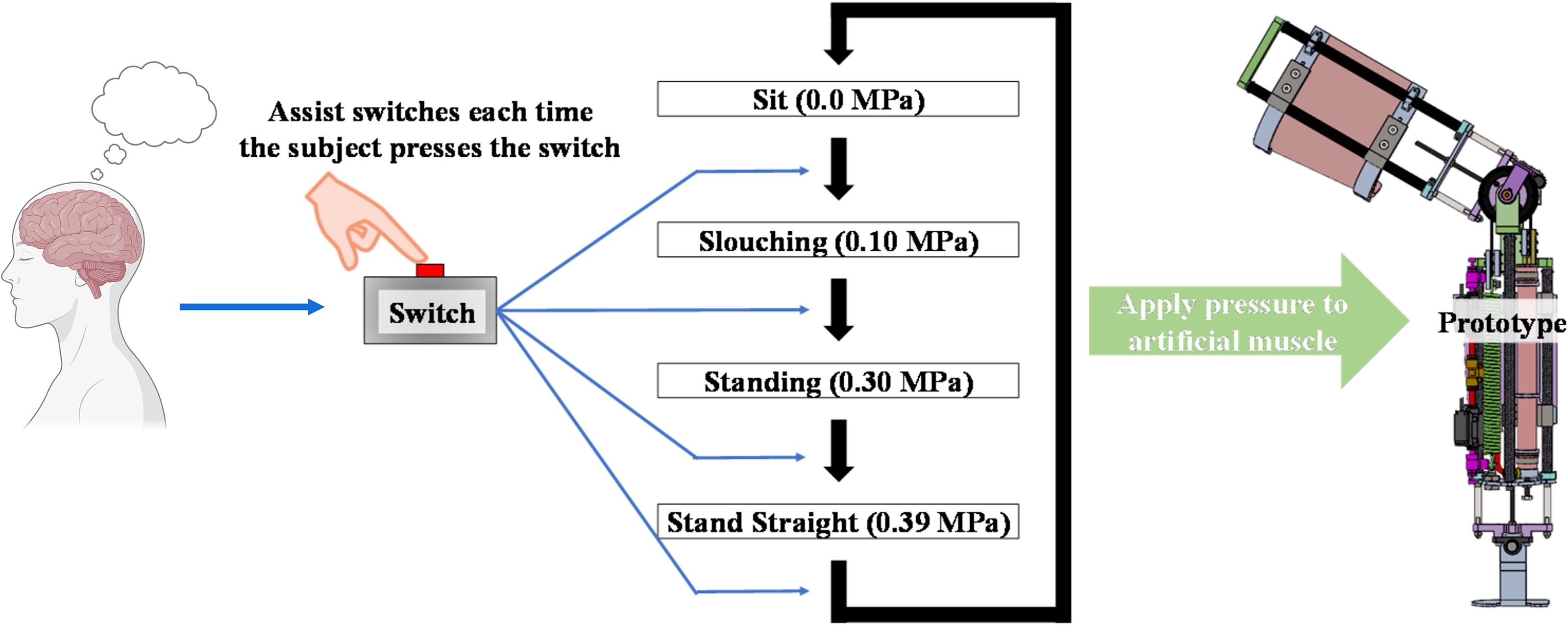
User-operated switch for STW intention detection, followed by switching of assistance mode based on sit-to-stand movement phases. Adapted and reprinted with permission from Kimura et al. 10 and published under CC BY 4.0.
Moreover, IMU data from specific body segments were considered across studies. Govin et al. 30 placed an IMU on the back of the neck to measure the forward head rotation and flexion angle relative to a neutral position. This was used to indicate the user’s posture for STS intent and variable pneumatic actuation. Similarly, Schmidt et al. 33 used three IMUs placed at the waist (trunk) and shanks to obtain their accelerations and rate of rotation, from which the respective joint angles were derived. The joint angles were an indication of posture which triggered the exosuit during STS. Additionally, Lear et al. 31 used a trunk IMU to measure forward lean for STS intent. Using kinetics/kinematics for intention detection falls under mechanically intrinsic control, 7 whereas neural controllers use signals such as SEMG or electroencephalogram (EEG) for measuring muscle or brain activity. Task recognition from neural signals for inferring movement intent was mentioned in an embodiment of the exosuit presented in reference. 31 As such, Furukawa et al. 36 used a PU classifier with an accuracy of 0.995 to detect STS motion intent and provide targeted assistance for only standing transitions. This type of classifier uses training data with positive cases labeled and negative cases unlabeled as it is impractical to label large-scale motion data covering various daily tasks.
Control systems
Active exosuits can be made up of a three-layer control architecture. Motion intention detection forms the high-level control, followed by generating reference joint angle/torque trajectories for mid-level control. The low-level control loop delivers the desired assistance to the actuator and receives feedback. 33 Control systems were implemented via software, such as MATLAB (MathWorks Inc.) or using microcontrollers such as a Raspberry Pi or ARM M4.10,27,33
For tensile exosuits, Schmidt et al. 33 used a posture-based gravity estimation algorithm to generate the target force. Tendon length (from encoder), trunk, and shank joint angles (from IMUs) were used to derive the knee angle based on a virtual leg model, which directly connects the hip to the ankle and determines the user’s posture. Desired tendon forces were then scaled, where the largest force (350 N at an angle of 100°) should occur during sitting and the lowest force (5 N at an angle of 180°) during standing (mid-level control). Closed loop force control with a PID controller was used to deliver the assistive force to the actuator and feedback was obtained via load cells and encoders. Alternatively, Baiden and Ivlev, 39 proposed a different method targeting hemiplegic stroke patients. A master–slave configuration with position control was implemented, where the master orthosis was placed on the unimpaired leg and the slave on the impaired leg. The slave copies the joint angle/posture of the master, and the respective error is fed into an open-loop torque and model-based pressure controller. These adjust the output torque and actuation PAM pressure accordingly. PID control was implemented for the ankle joint and proportional control for the knee joint to improve compliance. The advantage of the master–slave method is that a model for reference torque–angle trajectories as a mid-level controller is not required, however, this would only be applicable for subjects with an unimpaired leg.
Furthermore, Kimura et al. 10 derived the reference knee joint torque from the joint stiffness and antagonized angle based on motion analysis (mid-level control). A feed-forward torque controller was implemented where the target joint angle was used to calculate the required actuation pressure of the PAM and in turn the joint stiffness. STS was divided into three movement phases, each with different applied pressures to achieve the desired joint stiffness and antagonized angle. The phases were then selected through a user-operated switch.
Following this, Sridar et al. 27 used personalized motion event timing and predefined assistance set-points (for each event) as their desired torque reference. This was obtained through kinematic data and a pilot session with each subject. The desired actuation PAM pressure was calculated as a function of target knee torque and average angle. From this, a closed-loop PD controller was implemented to track the desired pressure. Based on feedback, the controller used pulse width modulation to adjust the timing of the three actuation states: inflation, holding, and deflation. Similarly, Zheng et al. 37 also used predefined levels of assistance based on the STS movement phases. Assistance modes were decided based on an approximate joint torque–angle relationship and STS phases were identified using thresholds of joint velocity and foot pressure from a force sensitive resistor.
Discussion and Future Prospectives
This review focused on soft robotic exosuits that aid STS and STW transitions, which are vital ADLs that impact mobility, independence, and quality of life. Majority of the exosuits in literature were focused on assisting STS transitions,13,17,22,29,30,39 with only selected devices being designed for or tested on STW movements.27,33 However, after standing, it is normal to assume an individual would begin ambulation, hence assistive devices should also be tested on STW rather than only STS. 3 Current STS exosuits primarily assist hip and knee extension, 34 but should also consider ankle assistance to maintain balance and prevent buckling. 28 With this, there is a need to assist older adults or impaired individuals during rehabilitation and wearable soft exosuits hold potential for this application. However, there is much room for improvement in the core technologies of these devices.
While tensile exosuits have well-established actuation methods and control architectures revolving around DC motors, they suffer inefficiency in transferring assistive force to the user. This is due to shear forces, friction, and low human-suit stiffness. 7 Yet, for STS and STW, large hip and knee extension torques are required 3 which introduces the need for high torque actuators, especially for individuals with complete loss of muscle function. PIAs such as the SLAK, 17 achieved high knee extension torque but produced nonlinear behavior, was not tested on human subjects and required an external air pressure source. Therefore, actuators that can produce large hip/knee torques should be investigated for optimal standing assistance. PAMs hold potential in this regard, but appropriate control architectures need to be investigated, as majority of existing literature used manual control (Table 1) without accounting for movement phases, posture, or execution startegies.17,26,28,29 Methods of making PAMS untethered and self-contained also need to be explored, to improve portability and mobility.
Maximizing human-suit stiffness while maintaining comfort in the physical HRI is a crucial component especially in tensile exosuits. Optimal cable routing should be implemented, with focus on the Gluteus Maximus, hamstrings, and quadriceps for hip and knee extension assistance in STS/STW. Cable paths should be kept as straight as possible with minimal length to avoid friction losses and anchor points should be located at bone landmarks. 9 Existing exosuits use fabrics such as spandex and nylon for designing their HRI, which adds to comfort, flexibility, and can accommodate different body sizes.16,22,33 However, these materials have low stiffness and lead to inefficiencies. Hence, alternate materials or techniques should be investigated for maximizing suit stiffness without compromising comfort. For example, the Myosuit proposed external nylon webbing at anchor points to improve stiffness. 33
A range of sensors were considered for measuring biomechanics, such as joint angles, kinematics, or kinetics for high, mid, and low-level control in the reviewed exosuits. Amongst these sensors, IMUs, encoders, potentiometers, load cells, and SEMG sensors were commonly utilized.17,29–31,33 However, alternate low-cost and wearable methods of sensing, such as inductive sensors via a series of coils, 42 textile based capacitive sensors, 43 and retractable string sensors based on skin stretch, 44 were not considered in standing assistive devices. These sensors hold potential for STS/STW assistance as they are unobtrusive and easily integrated with wearable technology.
Following this, various modes of STS/STW intention detection were employed across literature, with focus on mechanically intrinsic control.30,33 Early and autonomous intention detection is important to ensure correct and timely assistance is provided to the user. As such, neural signals are ideal but require alternate sensors and complex postprocessing techniques, while kinematic/kinetic data can be readily obtained from force sensors or IMUs but lag the neural signals. 7 Other methods of intention detection could include myoelectric signals through SEMG 45 or machine learning methods with mathematical models. 46 Moreover, high-level controllers should not be confined only to STS but also be applicable to other movements, such as STW, gait, and stair ascent/descent. They should also provide seamless transitions when moving from one motion to another. Numerous movements are performed during daily activities and classification methods to identify and target specific motions would also benefit the operation of assistive devices. 36
For mid-level control, existing literature used motion analysis, the joint angle–torque relationship, gravity estimation algorithms and predefined assistance set points to generate the reference joint torque or angles.10,27,33 These control architectures involved switching between modes of operation based on fixed movement phases or postures during STS. They did not necessarily consider the overall variation in the required joint torque and did not generate reference trajectories for the actuator to follow. Also, the reviewed studies did not consider the biomechanical variations between each individual and the exosuits only provided general assistance based on a user’s posture, movement phase, or event timing. Hence, advanced mid-level controllers using neural networks can be explored to account for variations in a population, such as age, anthropometry, and movement strategies or styles.3,47,48 This would provide user-targeted assistance rather than generic aid across a subject group.
Conclusion
There is potential for wearable soft robotic exosuits to aid older adults or impaired individuals in standing transitions, while compensating for the limitations of mechanical exoskeletons. Soft exosuits range from passive to active, comprising expansive, tensile, and hybrid devices. Exosuits vary with respect to the core technologies, based on actuation, physical HRI, motion intention detection, and control architectures. For STS or STW, each core technology has room for improvement with a need for higher hip and knee extension torque, stiffer yet comfortable suits, early and autonomous intention detection, and advanced control architectures for tailored assistance. Likewise, majority of the exosuits in literature were tested on a small number of subjects with some only being applied on a test bench. Hence, these devices should be assessed on a larger subject group focusing on standing transitions, to be generalizable to a population and ready for commercial or clinical use.
Footnotes
Acknowledgment
Figures were adapted using BioRender.com.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work is supported by the Ministry of Higher Education, Malaysia under the project number: