
Abstract
This article presents a design for a variable impedance actuator capable of changing stiffness and damping through the heating of a thermoplastic polymer, in an off-line manner. Typically, other actuators have additional mechanisms to regulate overall impedance, but the key component of this design uses polycaprolactone. This polymer exhibits temperature-dependent viscoelastic properties, so that at room temperature, it is rigid, and softens as temperature increases. Flexible heaters are embedded into the design for adjusting the output impedance. The variable impedance module has fixed elastic components in parallel with the variable elastic and damping components of the polymer. To show the effect of variable impedance, the motor was set to follow sinusoidal trajectories while the position of the output link was measured. As an indicator for change in the output impedance, the actuator exhibits a fivefold increase in overshoot due to a 40°C temperature increase. Although adjusting the output impedance of this device is not suitable for on-line implementation, the design is scalable and can be made compact through miniaturization of components.
Introduction
As robotic platforms increasingly encounter unfamiliar environments, physical human–robot interactions (pHRIs) are becoming more commonplace. To ensure safety and improve their resilience, these robotic systems need to adjust their level of impedance. Impedance refers to the resistance to motion, which comprises stiffness, damping, and inertia. 1 Variable impedance actuators (VIAs) 2 are a novel solution for creating compliant systems that can physically interact with humans. These actuators are capable of modifying their impedance by changing their stiffness,3–5 damping ratio,6,7 or even their inertia 8 when in contact with unknown environments. The purpose of this is to ensure the safety of humans interacting with robots while simultaneously improving performance criteria. 3
The primary subset of VIAs are variable stiffness actuators (VSAs), 9 which regulate only the stiffness component of the output link's impedance during physical interactions with external environments. Variable damper actuators7,10 and variable inertia actuators 11 are the other two subsets of VIAs, but they have garnered less attention in robotics research. The reason for this is that these designs lack energy-saving and releasing components compared with VSAs, resulting in less potential for reducing energy consumption in periodic motions.12–15 However, damping is necessary in applications wherein the system's overall energy must be kept below a certain threshold to ensure stability, such as knee joints in bipedal robots, which require the addition of damping to release energy.
VIAs should be able to control at least two degrees of freedom (i.e., link's trajectory and link's impedance) and require at least two independent sources of generating mechanical power (i.e., flow and effort) 16 such as electric motors.17,18 If both damping and stiffness need to be controlled on top of the link trajectory, then three motors will be required.
In general, altering the impedance parameters of an actuator requires a dedicated mechanism that is incorporated into the actuator's design. 19 However, incorporating such mechanisms results in bulky, heavy, and large actuators compared with traditional rigid or series elastic actuators (SEAs). 20 The bulkiness is the most significant practical drawback of VIAs, which limits their suitability in many applications. The extra components that are added to the design increase the inertia of the actuator, thereby decreasing its safety criterion for human–robot interaction (HRI) applications.21–23
Currently, SEAs are preferred over VIAs, even in applications that require impedance adjustments, such as bipedal locomotion24–27 and manipulation.28–30 At the miniature scale, low-power actuators that use heating in the form of shape-memory alloys have been investigated. 31 Outside of HRI applications, variable impedance is necessary for automation, task execution, and traversal of unknown environments.32,33 In this article, we present a novel thermal-based VIA, as shown in Figure 1.

Thermoactive VIA prototype constructed with 3D-printed PETG components with integrated flexible polyimide heaters. A weight of 0.91 kg is attached at the output link. PETG, polyethylene terephthalate glycol.
As with other series classes of VIAs, 19 a DC motor is typically used to command the position of the output link of the actuator. However, our VIA design is unique in that the actuator's impedance is adjusted by controlling the temperature of a thermoplastic polymer, polycaprolactone (PCL), instead of a mechanical mechanism. PCL is a thermoplastic polymer that falls under the category of polymers that exhibit changes in viscoelasticity as they transition from cold (rigid) to hot (soft). 34 PCL's reversible ability to change stiffness at human-safe temperatures makes it a promising material for pHRI applications.
To control the temperature, flexible polyimide heaters are embedded in our design. 35 Since a simple mechanism is sufficient for adjusting the impedance, our design enables compact and lightweight variable impedance actuation technology. The focus of this study is to characterize the model for impedance adjustment and evaluate the tracking capabilities of the actuator at different configurations.
The organization of this article is as follows: in Mechanical Design and Components of the Proposed PCL-Based VIA section, the key components of the thermal-based VIA will be introduced. Material characterization of the PCL will be discussed in Modeling the Viscoelasticity of the Proposed VIA section. Experimental Results section uses data from a trajectory tracking experiment to regulate impedance, and finally discussion and conclusion are presented in Discussion and Conclusion section.
Mechanical Design and Components of the Proposed PCL-Based VIA
The VIA that we have designed comprises a DC motor and gearbox that are connected in series with a thermoactive variable impedance module. The module includes embedded compression springs that provide a fixed level of compliance, and a PCL polymer that allows for a tunable damping ratio. The output of the thermoactive module is then connected to the actuator's link. In this section, we present the mechanical design of our proposed VIA, along with an explanation of how we fabricated a prototype.
Mechanical design
The thermoactive module in our proposed design has the following essential components as shown in Figure 2a–c: an outer ring attached to a fixed base that holds the PCL inside, and three radially mounted flexible polyimide heaters. The heaters are located in slots that have access to the outside environment. The reason for this mounting is so that the generated heat can be taken out of the system, otherwise it could damage electronic components and potentially lead to their failure. A prototype of the proposed VIA is shown in Figure 1.
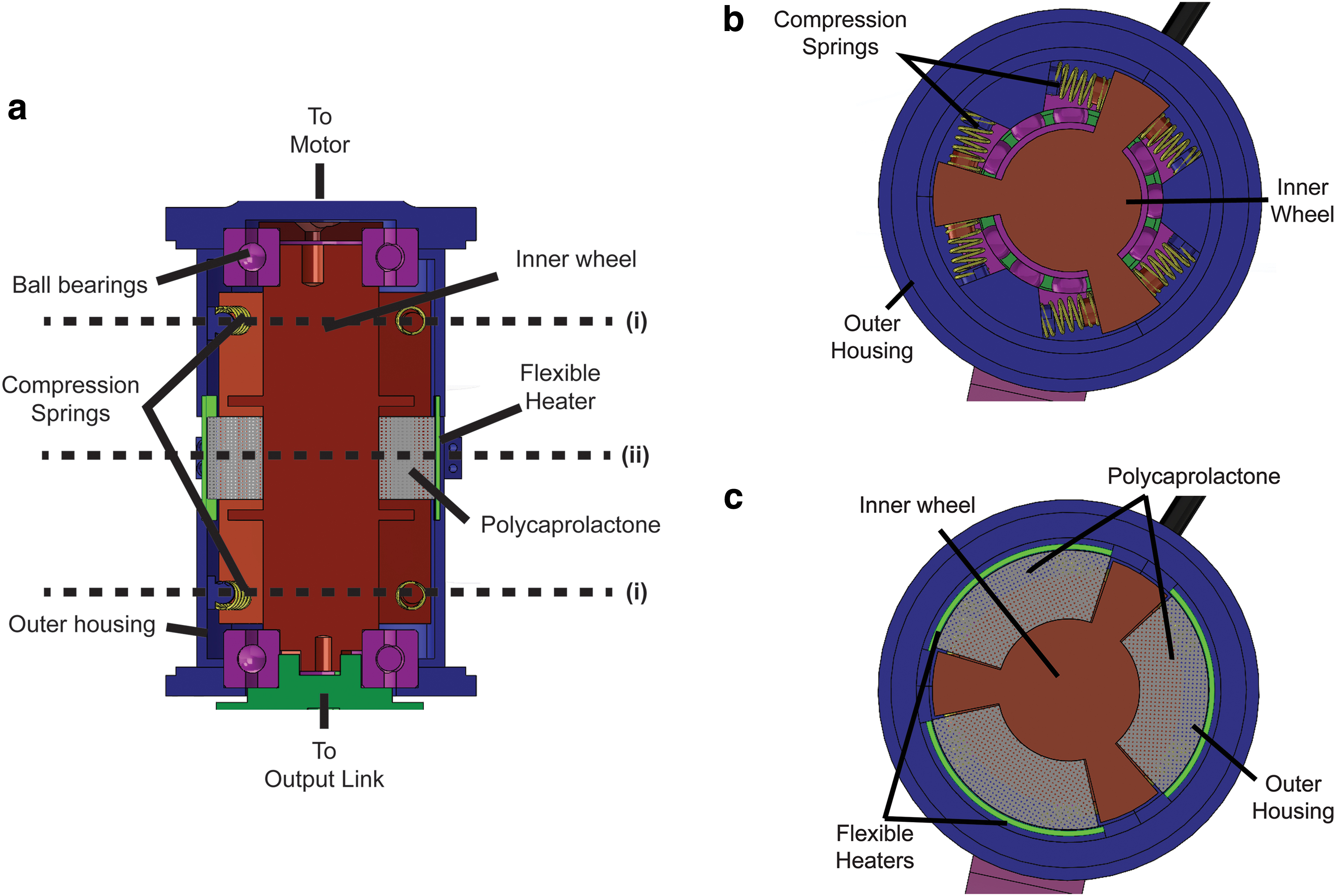
CAD design of thermoactive VIA.
To couple the variable impedance module to the motor, a spiked wheel is placed inside the outer ring and is attached to the output link, whereas the housing is attached firmly to the motor shaft. The spikes on the wheel are in contact with the PCL material that is also located inside the outer ring of the housing. As the output link moves, the spiked wheel rotates within the housing, pushing the PCL through its spikes. Each spike is connected to the housing via compression springs. When the wheel rotates within the outer ring due to the motion of the output link, the compression springs become deformed, causing the output link to behave in a compliant manner.
By placing the springs between the output link and the fixed end, our design acts like a SEA. However, the addition of PCL in the housing allows adjustment of the temperature to change the overall impedance of the system, utilizing the viscoelastic properties of PCL to create variable impedance behavior.
Next, the essential components of our physical prototype such as the PCL will be discussed in detail.
Components of the VIA prototype
All housing components, the output link, and fixed base of the VIA prototype outlined in Figure 2a were 3D printed. Polyethylene terephthalate glycol (PETG) was chosen for the filament as it has better shock resistance than traditional PLA and can withstand the higher range of temperatures from the heaters without melting or warping.
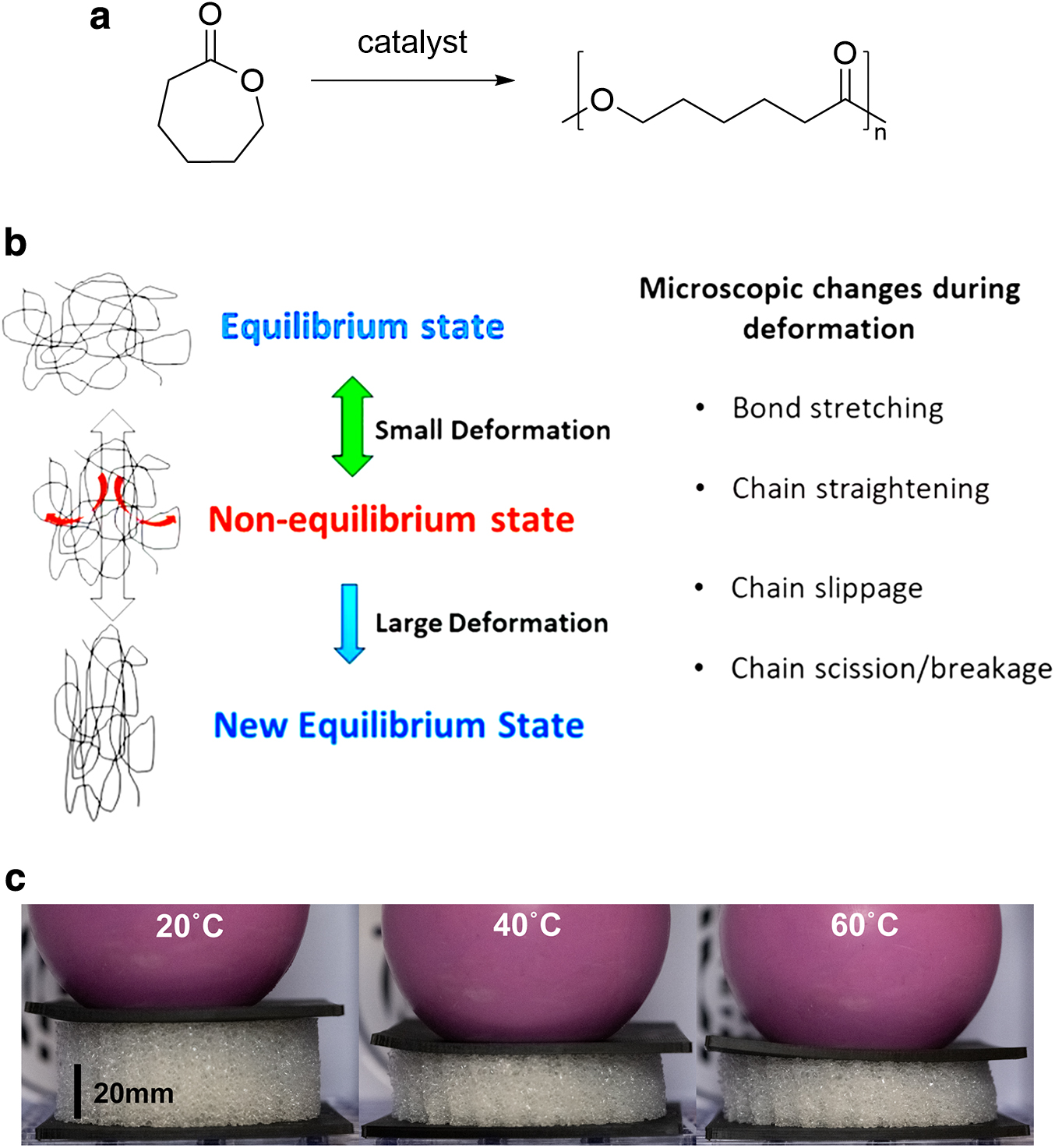
PCL is a biodegradable polyester that is known for its viscoelastic properties. It has a low melting point of around 60°C and a glass transition temperature of about −60°C. It is made by using a process called ring-opening polymerization, which is a type of chain-growth polymerization that involves the initiation of a polymer chain to attack cyclic monomers to form a longer polymer. 36 This method is commonly used to make biopolymers. Owing to its viscoelasticity, PCL can change its degree of stiffness as temperatures move from cold (rigid) to hot (soft), making it a versatile material for various applications. The structure of PCL is shown in Figure 3a. This chain resulted from ring-opening polymerization in PCL makes it a thermoplastic polymer. 37
PCL characterization.
As a polymer, PCL exhibits viscoelastic behaviors as it undergoes both recoverable and permanent deformations depending on the levels of applied forces. Polymeric chains can have motions at different timescales: from atomic vibrations to full chain diffusion. Diffusion of large segments of chains occurs at a much slower speed than diffusion of small segments. Owing to this property, polymeric materials have time-dependent deformations.
In the absence of an external force, the morphology of the polymer chain is determined by the internal forces, such as chemical bond, intermolecular interactions, segmental mobility, entanglements, and crystals. 38 At this morphology, the internal forces continuously interact with each other to form the lowest possible state. This state is a highly disordered form of chains called the equilibrium state. When an external force is applied, it leads to the alignment of some polymer chains in the force direction. However, other polymer chains try to pull the affected chains back to the original position through the entanglement points. 39
At small deformations, bond and chain strengthening 40 can take place. Both deformations act like strengthening a spring, so the polymer will return to its original shape once the force is removed (Fig. 3a). In contrast, if the polymer chain is deformed further or the load is applied for a long time, then chain breakage and slippage41,42 can occur. Both phenomena would result in a permanent change in the polymer morphology. As a result, when the force is removed, the chain will not be able to return to its original shape and it will retain a new equilibrium state.
PCL is a plastic polymer that becomes moldable at high temperatures and solidifies upon cooling. It is a thermoplastic with high molecular weight, and its polymer chains associate through intermolecular forces, which weaken at high temperatures. 43 As a result, PCL becomes a viscous liquid that can be reshaped and is commonly used in polymer processing techniques. Its degree of stiffness changes as temperature increases, becoming softer as it gets hot and rigid as it cools.
To determine the impedance variation of PCL as a function of temperature, some static tests have been done 44 (i.e., evaluating stiffness component of the impedance) on a sponge made of PCL. In these experiments (shown in Fig. 3c), a known weight (4.5 kg) was placed on the sponge while the temperature changed from 20°C to 60°C. The vertical deflection of the sponge was then measured and then normalized with its original thickness to determine the strain. Similarly, the weight was divided by the area of the sponge to calculate the stress.
Modeling Viscoelasticity of the Proposed VIA
To fully characterize the impedance of our design, the viscoelastic properties of PCL, that is, its storage E1, G1 and loss E2, G2 moduli (tensile and shear), as functions of temperature T, must be considered. Figure 4 shows both tensile moduli decreasing dramatically when the temperature exceeds 30°C. Below this threshold temperature,

Storage and loss (tensile and shear) moduli of PCL at different temperatures (adapted from Mosleh et al.). 45
In our proposed design, the compression springs, mounted radially around the wheel, can be modeled as fixed springs in parallel with the PCL modeled as a variable spring and dashpot. The two primary methodologies for modeling viscoelastic materials are Maxwell 46 or Kelvin-Voigt 47 models. Both models use springs to depict a pure elastic element and a dashpot to represent a pure viscous element.
These models differ in how they apply stress and strain to these elements. In the Maxwell model, both the spring and dashpot experience the same stress, whereas each element has an independent strain. In contrast, in the Kelvin–Voigt model, both the spring and the dashpot are subjected to the same strain, but each element has independent stress. Although the Maxwell model is better at predicting the recovery phase (after releasing the external load), the Kelvin–Voigt model can more accurately represent the strain rate–time dependency that is fundamental in viscoelastic behavior, such as the creep phenomenon. 48
When modeling a viscoelastic material that exhibits pre-dominant elasticity, the Kelvin–Voigt model is typically preferred for describing the creep behavior of the material, due to its practicality and wide application in the engineering field. 49
In our design, we present the PCL as a Kelvin–Voigt model, since the compression springs will be modeled as a spring in parallel with PCL, which will have higher stiffness than that of the spring in the PCL model at higher temperatures.
The schematic of the VIA model is presented in Figure 5. The output link is attached to the variable impedance module that is connected to the DC motor. The variable impedance unit is composed of a damper to represent viscosity of PCL

Schematic model of the proposed variable impedance module, located in series between the motor and the output link and powered through the flexible heaters.
Similarly the torque at the output of the motor end is TM and TL is the output torque available at the output link of the actuator. The flexible heater generates heat to increase the temperature of the PCL. Changing the temperature alters the tensile and shear storage and loss moduli of PCL (E1, G1, E2, G2), thus changing overall elasticity and viscosity. (
The equation of motion for the output link as a result of the output torque, and while the output of the torque is 0 (i.e.,
where IL is the link's inertia and TM is the torque available at the output of the motor that already has the motor/gearbox inertia and damping components in it. In terms of stress–strain, the Kelvin–Voigt model leads to the following equation:
where
Experimental Results
To examine the capability of our proposed VIA in regulating the overall impedance of the output link, the motor was set to follow trajectories as
The PCL temperature was set at different levels from room temperature (22°C) to 60°C using the flexible heaters. The goal was to show how the temperature can affect the time-dependent impedance of PCL as the creep and stress relaxation behaviors, that is, the response of the output link to the driving motor signal was plotted.
System identification
For the purpose of system identification, a sinusoidal trajectory with varying frequency was applied to the motor shaft. Simultaneously, the trajectories of both the output link and the motor shaft were tracked at each frequency using dedicated encoders. It is important to note that the deviation between the commanded trajectory for the motor shaft and the actual trajectory of the output link is the result of the system compliance. This compliance is a combination of stiffness and damping of the output link both affected by the temperature of the polycaprolactone polymer. The model was then validated by comparing its predictions to experimental data not used for model identification.
In details, Equation (1) requires knowledge of
Furthermore, Equation (1) was adjusted to solve for the last unknown
Once the approximate
Viscoelastic Properties of Polycaprolactone
In the design of our VIA, the equilibrium position of the compression springs is set at half of the allowed pretension around the central axis (radius = 22.20 mm) (Table 2). Any angular deflection causes the springs to bend and behave in a nonlinear manner as increased forces are applied. As a result, the ks values used to calculate
System Parameters
PCL, polycaprolactone; VIA, variable impedance actuator.
The
Tracking a trajectory
The motor shaft is commanded in such a way that leads to a sinusoidal trajectory of A = ± 20° amplitude and
Since the output link is not being controlled directly, is compliant, and has both elastic and viscous behavior, we expect to see some amount of overshoot compared with the trajectory of the motor. As the output link becomes more compliance, we should see an increase in the amount of overshoot. In addition, as the output link is in fact a second-order system (i.e., mass-spring damper), we also expect to see some phase delay between the input (i.e., trajectory of the motor) and the output (i.e., trajectory of the output link). Furthermore, these effects should depend on the frequency of the oscillations.
The results are depicted in Figure 6, for two levels of temperature (22°C and 60°C) and two levels of frequency (0.5 and 1 Hz). In each case, the output link started from its stationary position and thus exhibits some irregular transient behavior. However, after a while the output link entered its steady-state case, where it was following a similar sinusoidal trajectory. In each set of experiment, some level of overshooting was noticed.

Following a sinusoidal trajectory for the output link at different temperatures versus expected trajectory.
However, the result showed that when the temperature is high, that is, ∼60°C, the output link trajectory will have greater overshoot, that is, 30% increase from 22°C (blue curve), as the high temperature results in lowering the viscosity of PCL. However, there were no significant differences in the phase delay of the output link encoder values during the trajectory experiments from 22°C to 60°C. This could be due to the fact that both frequencies were small compared with the natural frequency of the output link, and thus the output link is in-phase with the motion of its base (i.e., the motor shaft).
Figure 7 shows the amount of overshoot at three levels of temperature (i.e., 22°C, 45°C, and 60°C) being normalized based on the amount of overshoot at room temperature (i.e., 22°C). As it is clear from the result, at low frequency (i.e., 0.5 Hz), the effect of changing the temperature on the overall impedance of the actuator is very dominant. At 60°C, the amount of overshoot was almost five times of that amount in the room temperature. This clearly shows that our actuator was able to regulate the output impedance by changing the temperature. However, this effect was less dominant at higher frequency (i.e., 1 Hz), yet still effective. It is important to note that changes in the amount of overshoot are considered as an indicator for impedance regulation, rather than the actual impedance measurement.
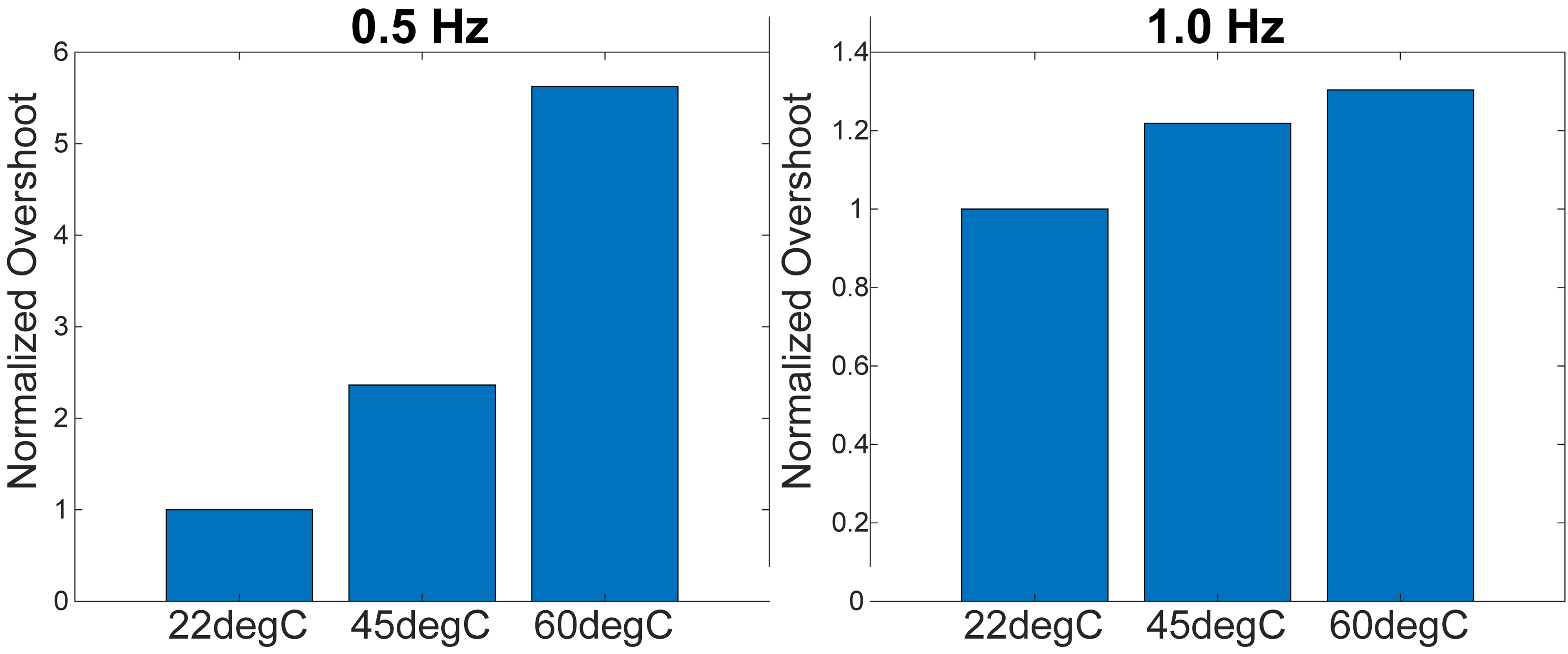
Overshoot at room (22°C), intermediate (45°C), and high (60°C) temperatures, normalized to room temperature between 0.5 Hz (left) and 1.0 Hz (right) trajectories.
Discussion and Conclusion
This article introduces a novel approach to adjusting the impedance of an actuator by regulating the temperature of a viscoelastic polymer, PCL. The temperature control is achieved using flexible polyimide heaters, and a simple design is proposed to enable variable impedance behavior. The lightweight and simplicity of the design can offer new possibilities for developing the next generation of thermoactive VIAs for pHRI applications. The proposed actuator prototype demonstrates the ability to regulate both elasticity and viscosity in an offline manner.
However, the impedance adjustment mechanism is not suitable for online impedance adjustment. Further thermal modeling and optimization are required for online performance. Many actuator systems incorporated into machines have thermal management incorporated. Therefore, identifying active-cooling systems is necessary for online implementation. In addition, we note another limitation of this design that will be improved in future versions, such as the PCL body maintains deformed shapes at room temperature and, therefore, before testing, all heaters were increased >60°C to allow the structure to snap back and fill cavities.
Also, the temperature of the flexible heaters did not accurately represent the total body temperature of PCL, which could be due to air pockets throughout the PCL sponge. The overall rigidity of the PCL bodies was qualitatively examined as temperatures changed. In future study, control systems could be implemented to hold the temperature consistent in the steady state. Additional electrical components may be housed within the body of the housing separate from the heaters to remain isolated from the heat generation.
In future experiments, we aim to optimize the design of our VIA by investigating the packing density and geometry of PCL cavities. Furthermore, since the focus of this study was on offline impedance regulation, the speed of heating was not evaluated, which indicates that further thermal regulation is required for successful implementation. Although the full characterization of temperature-based mechanisms is still an area of active research, a notable advantage is their ability to minimize the overall system footprint by eliminating the need for additional motors.
This compactness makes them particularly valuable for seamless integration into existing setups. We also plan to analyze the effects of scaling down the size of the actuator on the rate of impedance adjustment. In addition, we intend to develop a comprehensive electrothermomechanical model that can be used to analyze the performance of the proposed actuator and optimize its applicability. Future trajectories should be made more complex in incorporating disturbances/perturbations, and increasing frequencies to/above the natural frequency of the output link. To improve the transient response, heatsinks can be implemented to make the heat transfer of the module more efficient. Once our VIA is fully realized, we plan to implement it in a small form factor robotic joint for pHRI applications.
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This study was funded by the National Science Foundation NSF under grant number 2045177, and by the National Institute of Health (NIH) through grant number T32GM136501.