
Abstract
The maximum number of damage and healing cycles that can be endured by a self-healing (SH) actuator, that is, its repeatable healability, has never been assessed. One reason for this is because healability was always tested manually. Typically, an operator uses a sharp blade to manually damage the actuator and places both damaged edges back together for them to heal. This process is time consuming, which explains why only a limited amount of damage and healing cycles has been reported. Moreover, this leads to an inaccurate estimation of how repeatable the actuator's healability is, since manual damage cannot be always performed at the exact same location. Therefore, we present a method to automatically and autonomously assess the repeatable healability of a soft SH actuator. It uses a robotic system composed of a damage station and a healing station, which the actuator is automatically moved between using a robotic arm. A sensor integrated inside the actuator is used alongside a dedicated characterization algorithm to automatically indicate whether the actuator is properly damaged and healed. We present a typical use case of the system, performing and analyzing 63 damage cycles of a selfhealing Diels–Alder actuator. After 53 cycles, the actuator will never properly heal again, therefore, we consider this cycle to be the maximum repeatable healability of the tested actuator. The healability of the SH Diels–Alder actuator is, therefore, not infinite experimentally.
Introduction
Soft robots are inherently compliant and safe, which make them particularly suitable for applications in unknown dynamic task environments and safe human–robot interaction. Because of their soft nature, these robots are prone to damage from sharp objects, fatigue from repetitive loading, and overloading. 1 One technology that prevents soft robots being disposed due to permanent damage is self-healing (SH) polymers, which allow the healing of microscopic and macroscopic damage. 2 However, to date, it is unclear how many damage and healing cycles an SH polymer is capable to handle.
Theoretically, SH polymers can endure an infinite amount of damage and healing cycles, such as thermoreversible Diers–Alder networks that gradually reform damaged cross-links under external temperatures. Despite this, no research has ever focused on proving this experimentally. Indeed, the testing of this “repeatable healability” of soft SH polymers is mainly done manually.3–8 Typically, the material is first damaged using a sharp tool. Then, the wound is closed by bringing both damaged flanks together manually and the damaged area is healed (depending on the polymer type, an external source of energy such as heat might be used). Finally, the healed sample is tested.
If the sample is a polymer sheet, the healing will typically be tested in a tensile test machine and the mechanical properties of the sample will be compared with those of the undamaged sample.9–11 However, if the sample is a soft actuator, its actuation capabilities, such as its bending, displacement, and generated force, will be tested and compared with its undamaged properties.2,12–16 In the above examples, the damage and healing cycles are manually performed. This process is, therefore, very time consuming and tedious, especially if multiple healing cycles are tested (1–3 healing cycles were tested in the above-mentioned references). For this reason, no data is available (to the best of the authors' knowledge) on the maximum number of damage and healing cycles an SH polymer is capable to withstand.
To fill this literature gap, we propose a method to autonomously and automatically assess the repeatable healability of SH polymers. To demonstrate this proof of concept, we chose to test the repeatable healability of a pneumatic SH soft actuator, which is a soft robotics component highly susceptible to failure due to its thin membrane. Regarding the damage, we focus on cuts and perforations caused by a sharp object. 1
The method uses a robotic system (Fig. 1) that autonomously performs a cut in the actuator, provides heat to initiate the healing, and checks whether the actuator is properly damaged and healed by collecting and analyzing the data from a strain sensor embedded in the actuator. By collecting the data of a strain sensor embedded in a system, the state of this system can be analyzed.17–20 Moreover, by using an automated system, the actuator can be damaged at exactly the same location multiple times, eliminating the uncertainties associated with manual damages.
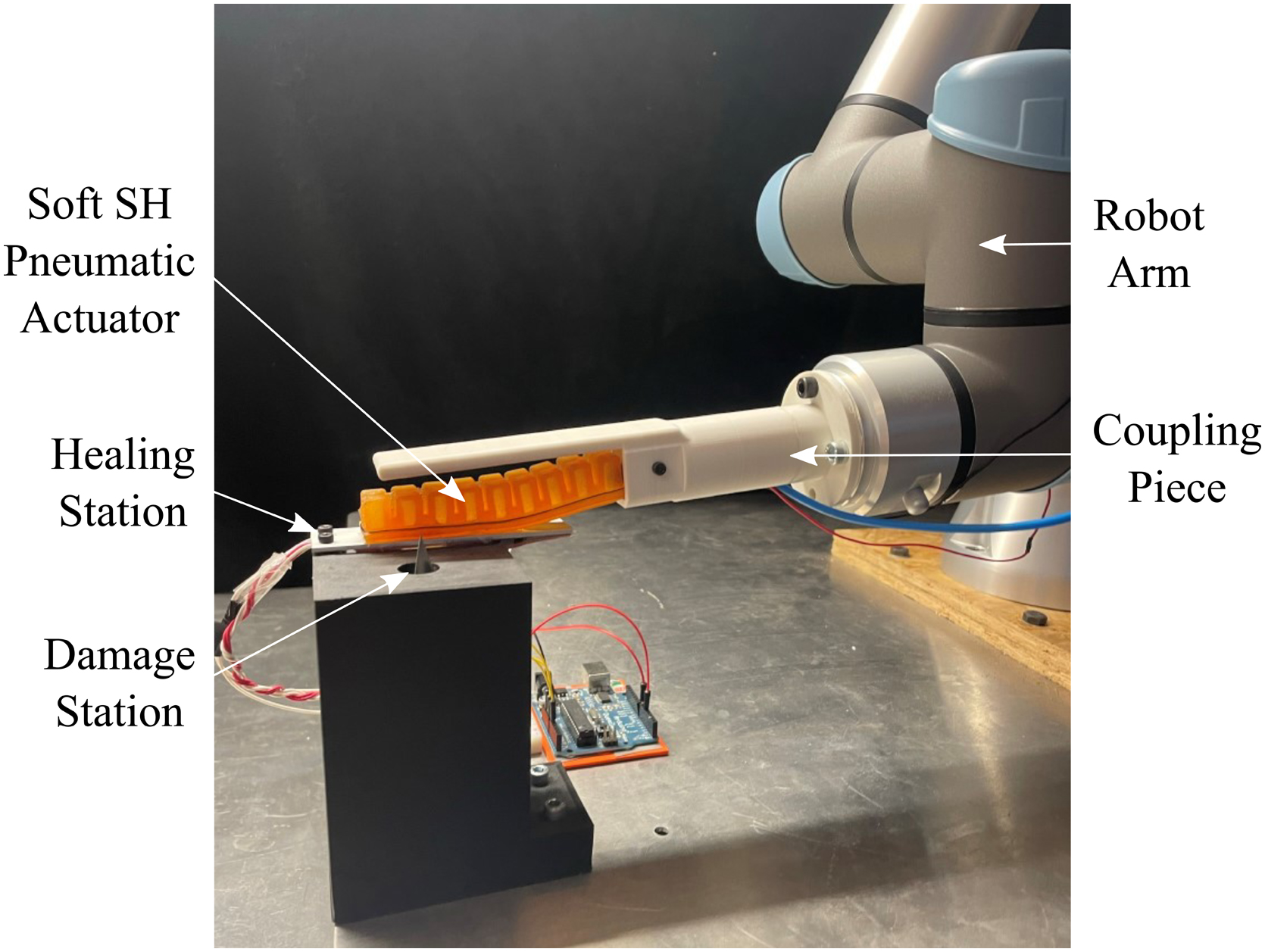
The automatic robotic system for testing the healability of pneumatic SH actuators. Characterization of the actuator continuously occurs as it is repeatedly damaged at the “Damage Station” and repaired at the “Healing Station.” SH, self-healing.
To perform the data analysis, we develop an algorithm capable of automatically detecting damage and healing of the actuator. This robotic system can be used to accurately deduce the maximum damage and healing cycles that an SH soft pneumatic actuator can endure, providing for the first time a soft robotic application-oriented benchmark. As a result, the SH actuator presented in this study was able to handle 53 damage and healing cycles, after which the actuator would never properly heal again. We, therefore, consider 53 cycles to be the maximum repeatable healability of the tested actuator. The healability of the SH Diels–Alder actuator is, therefore, not infinite experimentally.
Materials and Methods
Autonomous robotic system
The system is composed of three main components: a robotic arm, a damage station, and a healing station. The robotic arm is a Universal Robots UR5e (Universal Robots, Odense, Denmark), which is controlled through Ethernet/IP communication. The actuator is mounted on the robotic arm using a 3D-printed coupling piece (Fig. 1) and pressurized using a Festo valve VEAB-L-26-D7-Q4-V1-1R1 (Festo, Esslingen am Neckar, Germany) that is controlled using a National Instruments (NI) USB 6212 data acquisition system (National Instruments, TX). The data of the strain sensor, integrated in the actuator, are read by the NI USB 6212 DAQ through a 12 kΩ potential divider.
The damage station consists of a 10A scalpel blade coupled to an SMC CD85N12-100C-B pneumatic cylinder (Fig. 1). The pneumatic cylinder is controlled using the UR5e's digital outputs to operate two solenoid valves that apply 3 or 0 bar to fire or retract the blade, respectively. The control and data-acquisition algorithms are synchronized and implemented in a single C++ program. The coupling piece contains a rigid sidewall that allows the actuator to be properly clamped between the coupling piece and the damage station such that it does not bounce when pierced by the blade.
The healing station consists of three RS PRO Silicone Heaters 12 V-25 W (RS Group plc, London, United Kingdom) adhered to an aluminim plate with the same width and length as the soft SH actuator (Fig. 1). The temperature of the heater is held at 45°C using transistor-operated bang-bang control with hysteresis through an Arduino Duemilanove. A scheme of the architecture of the setup is shown in Figure 2. A video of the robotic system performing a full cycle of healability test is available in Supplementary Video SV1. The main challenge for system integration was to integrate the soft actuator to the other rigid pieces of the setup (the robot, the damage station, and the healing station).

Schematics of the automatic robotic system architecture.
The position of the soft actuator (and especially its tip) is difficult to predict due to its soft nature. Therefore, multiple experimental tests have been conducted to find proper robot positions that would lead to proper soft actuator positions throughout the damage and healing cycles.
Soft SH pneumatic actuator
The pneumatic actuator (Fig. 3) is the popular PneuNet actuator21,22 made of a Diels–Alder network polymer (component 1 in Fig. 3). 23 The polymer network is formed by crosslinking between a bismaleimide (DPBM) and a furan containing compound (FT5000). DPBM is 1,1-(methylenedi-4, 1-phenylene) bismaleimide with a purity of 95% obtained from Sigma Aldrich. FT5000 is a furan-fuctionalized Jeffamine, obtained through an epoxy amine reaction between furfuryl glycidyl ether (FGE) and JT5000, which is a polyetheramine obtained from Huntsmann Jeffamine T-series triamines, with a molecular weight of 5712 g/mol. FGE has a purity of 97% and is supplied by Sage Chemicals.

Soft SH pneumatic actuator.
The SH polymer is synthesized in a two-step solvent-free synthesis. First, FGE is reacted with a stoichiometric amount of Jeffamine, yielding the furan-functionalized Jeffamine (FT5000) compound with a molar mass per functionality (MF) of 691 g/mol. The irreversible reaction is performed for a minimum of 7 days at 60°C under continuous magnetic stirring, after which the reaction for 2 days is completed at 90°C. Next, the network is synthesized through mixing of FT5000 and DPBM and crosslinking through the Diels–Alder reaction. The DPBM crystals are melted at 160°C, increasing their solubility.
Next hot FT5000 (at 160°C) is added with a nonstoichiometric maleimide to furan ratio of 0.5 (r = [M0]/[F0], with [M0] and [F0] representing the maleimide and furan concentrations). As illustrated in previous study, a low r value and the resulting excess of unreacted furan in the DPBM–FT5000-r0.5 polymer network increase the healing rate at ambient temperatures. 24 Immediately after pouring the hot FT5000 on the DPBM melt, the parts are mixed for 1 minute using a magnetic stirrer. Next, the mixture is poured into a silicone mold, containing the negative of the pneumatic actuator. The mixture reacts into a DPBM–FT5000-r0.5 elastomer due to Diels–Alder crosslinking. The resulting actuator is 100 mm long, 20 mm wide, and 20 mm thick (Fig. 3).
The actuator is also equipped with an SH strain sensor situated around the pneumatic chambers, which is used to check the bending properties of the actuator (Fig. 3). The SH composite used for this sensor (component 2 in Fig. 3) is a Diels–Alder network composite, containing carbon black filler CB260 (20 wt %) and nanoclay Cloisite 15A (1 wt %) to create a combined SH and electric conductive property (details in previous study 25 ). The composite contains a DPBM–FT5000-r0.6 matrix that is created through solvent casting, in which DPBM crosslinks FT5000. First, the clay and carbon black, together with the FT5000, are dissolved in chloroform (20 wt %) by magnetically stirring the mixture for 24 hours.
The slurry is poured into a Teflon mold and the solvent is extracted in vacuum for 24 hours. Upon solvent extraction, the polymer network is formed through crosslinking. Next, dispersion of the filler is increased and homogenized through extrusion in a single screw extruder (Noztek Touch). Lastly, fibers are created in a piston extruder using a 0.5 mm die at 112°C. 25
Characterization of the actuator and sensor properties
To perform multiple damage and healing cycles of the actuator autonomously, the bending behaviors of the soft pneumatic actuator and the sensor were first characterized. To do so, values of the integrated strain sensor were recorded over 10 loading/unloading cycles (0–0.25 bar). These were matched to the known bending angle of the actuator that was recorded using the tracking of round markers placed on the actuator from video images. More specifically, two round markers were glued to the tip on the side of the actuator, whereas two others were glued at the base on the side of the actuator (Fig. 3A).
The function imfindcircles() of Matlab was then used to get the positions of the round markers. The angle between the line defined by the base markers and the line defined by the tip markers was determined as the actuator bending angle. This characterization was performed on both the functional actuator (healed) and the damaged actuator (Fig. 4). The damage was inflicted manually on the back of the actuator (i.e., on the flat surface of the actuator) at the level of the third chamber (from the tip), using a sharp blade. From Figure 4A, we see that the sensor needs approximately three loading and unloading cycles before the data are repeatable with a precision smaller than 20% (Fig. 4B).
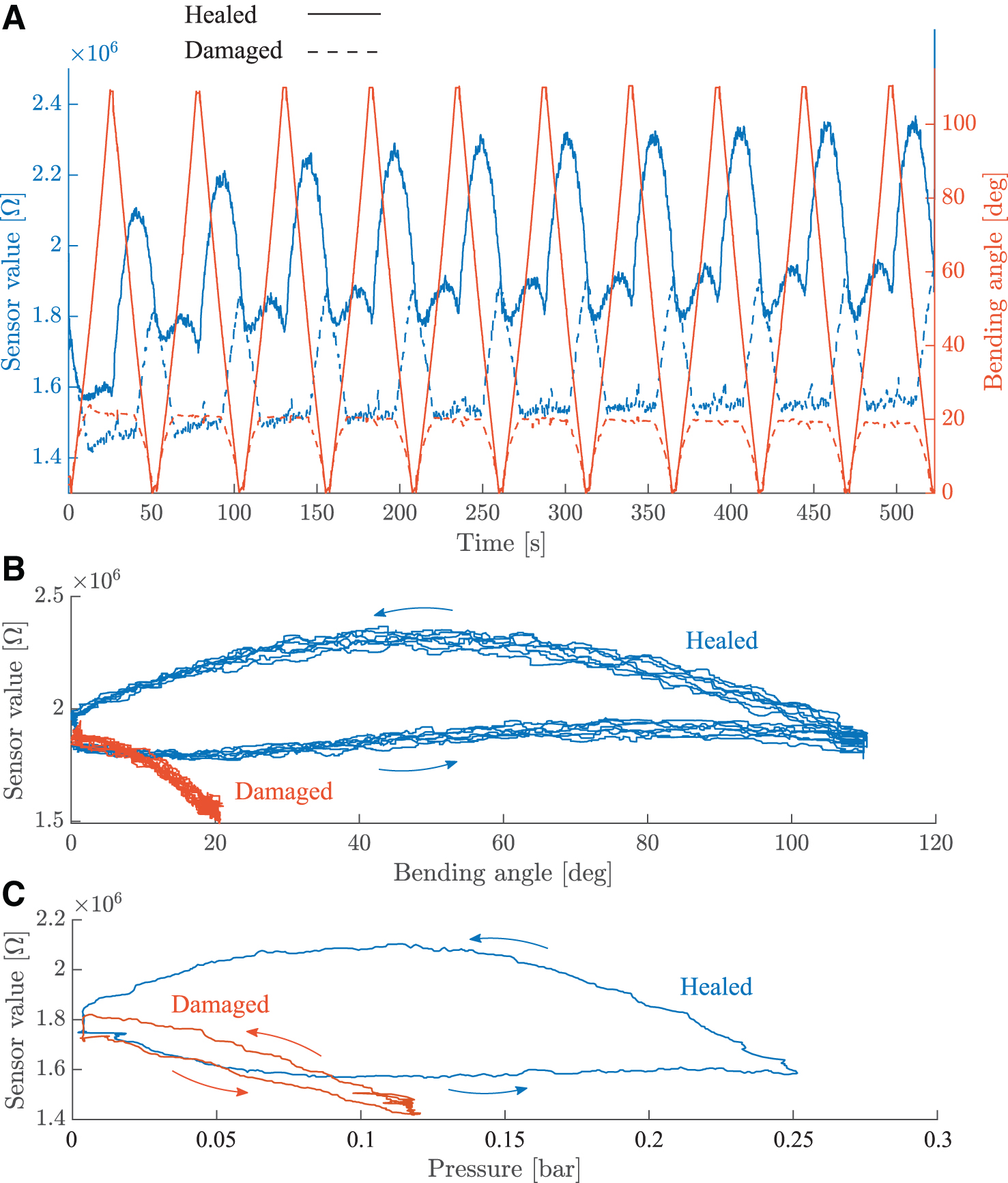
Characterization of the soft actuator's bending angle and sensor value when healed and damaged.
This phenomenon is due to the dynamic characteristics of the Diels-Alder (DA) polymer network. 25 After three (un)loading cycles, the measured precision is 0.12 MΩ when the actuator is healed and 0.11 MΩ when damaged. The measured precision is calculated as the maximum sensor value difference for a given bending angle, either on the loading or on the unloading curve (Fig. 4B). Although the three loading and unloading cycles are necessary for the sensor data to be repeatable, a distinctive pattern emerges during the first three cycles between the healed and damaged actuators despite their drift (Fig. 4A).
When the actuator is fully functional (i.e., healed), its sensor value is highly nonlinear (Fig. 4B) due to the sensor design and placement. Since the sensor is placed around the actuator's perimeter, it not only deforms when the actuator deforms, but also when the wall of the actuator expands, which compresses the sensor. Therefore, during loading, the sensor value stays close to its rest value (1.9 MΩ ± 0.15 MΩ), whereas during unloading the sensor values peak at 2.3 MΩ. When the actuator is damaged, it still bends up to 20°, but there is not enough pressure to significantly deform the actuator chamber walls.
Therefore, the sensor value decreases under its rest value (Fig. 4B), which is typical of a pure bending behavior. 25 During the automatic damage and healing test of the actuator, the hysteresis will be analyzed. Figure 4C represents the sensor data during the first (un)loading cycle of the actuator when damaged and healed, where it can be seen that the hysteresis of the healed actuator is more prominent than the hysteresis of the damaged actuator. Because of the leakage that occurs in the damaged actuator, the material cannot expand and stretch properly, and the nonlinear behavior of the soft SH polymer is not observed.
Test protocol
Having characterized the behavior of the healed and damaged actuator, the autonomous repeated healability assessment of the actuator can take place. The robot arm is first placed at its home position that suspends the actuator vertically above the work surface, where it is loaded and unloaded (0–0.25 bar) once while the values of the strain sensor are checked (Fig. 5.1). The sensor data are recorded with a 50 hz sampling rate; a full loading and unloading cycle lasts 40 seconds. The robot arm then moves the actuator to the damage station and places the actuator flat on the damage station where it is loaded with 0.1 bar to ensure proper contact.

Testing the healability of the soft SH actuators. (1) Posthealing characterization; (2) damage: the blade pierces the fourth chamber of the actuator; (3) postdamage characterization; (4) healing: placement of the actuator on a warming plate at 45°C for 25 minutes, then placement of the actuator at home position at room temperature for 35 minutes.
The pneumatic cylinder attached to the blade is then actuated such that the blade punctures the fourth chamber of the actuator (Fig. 5.2). This specific location for damage on the finger was chosen arbitrarily. After this puncture, the blade retracts, the pressure in the actuator is released, and the robot brings the actuator back to the home position. There, the actuator is again loaded and unloaded once while the values of the strain sensor are recorded (Fig. 5.3). After damage, the actuator is brought to the healing station, against the heated plate, where it is left unpressurized for 25 minutes to increase the mobility of the material's DA bonds (Fig. 5.4).
The plate is held at 45°C (measured below the fourth chamber). The actuator is then returned to its home position where it is left to heal unpressurized for 35 minutes. Afterward, the actuator is loaded and unloaded to check whether it has recovered its original bending properties. Simultaneously, the values of the strain sensor are checked (Fig. 5.1). This protocol was repeated until complete failure of the finger (either actuator and/or sensor failure). Complete failure happened after 63 damage and healing cycles, due to a sensor defect.
A video of the robotic system performing a full cycle of healability test is available in Supplementary Video SV1. Note that the actuator will be damaged at the exact same location through the damage cycles. This is done to assess the repeatable healability in the worst case scenario, that is, when the actuator is damaged multiple times at the same exact location, making this location weaker.
Results
The system was tested in two phases: the assessment phase and the automatic running phase. During the assessment phase, which lasted five (un)loading cycles, an operator stayed near the automatic system and confirmed aurally that the actuator was damaged and leaking. Based on this phase, a quantitative differentiation could be determined between the damaged and the healed actuator. Then, during the automatic running phase, the robotic system was run without any operator for 58 cycles, and automatically gave an indication whether the actuator was properly damaged and healed based on the sensor data and the quantitative differentiation determined during the first phase.
Manual assessment phase
The sensor data were analyzed during the first five (un)loading cycles and the operator took note of the actual damage and healing. During the first cycle, the actuator was pierced with the sharp blade, which is visible by a small peak on the sensor data depicted in Figure 6, but no leak was noticed. The hysteresis of the damaged actuator was, therefore, similar to the healed actuator (Fig. 7A). During the second cycle, the actuator was slightly damaged and the leak became noticeable at 0.2 bar (Fig. 7B). From the third to the fifth cycle, the actuator was properly healed and clearly damaged.
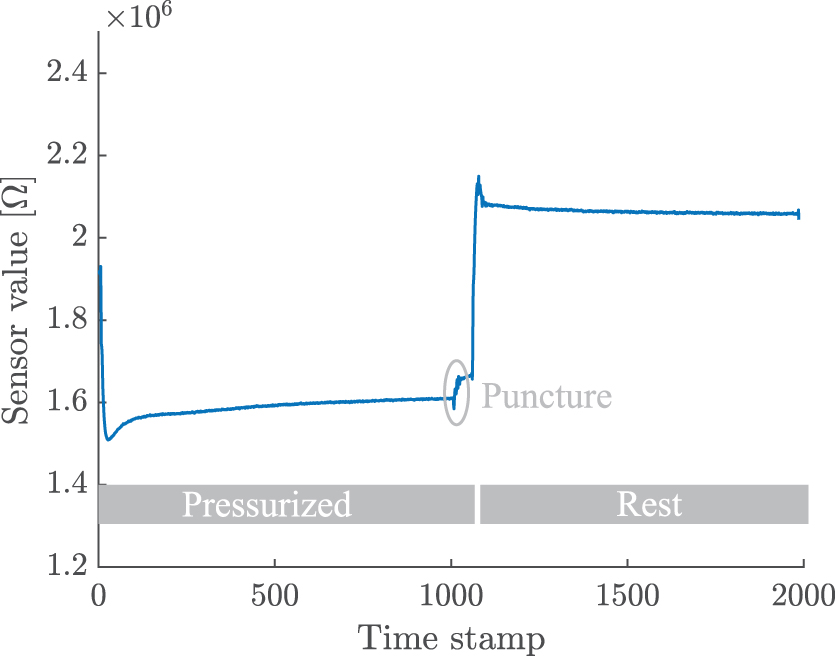
Sensor value with time during puncturing of the soft actuator. The actuator is first pressurized (low sensor value) to ensure proper contact with the damage station. Then it is punctured, a small peak is visible on the sensor data. Finally, the pressure in the actuator is released (higher sensor value).

Sensor value versus actuator pressure after damage and healing, with evaluation of the HHA and HAF.
An example of the recorded data is reported in Figure 7C. As visible in Figure 7, the hysteresis characteristic of a healed actuator changes through the cycles. This can be due to a change in ambient temperature, which affects the DA polymer network; multiple loading cycles, which can fatigue the material; and time, since the DA polymer properties can change temporally. 26 We, therefore, choose the smallest measured hysteresis of the healed actuator (HHA)—5.8 · 104 bar Ω—as the benchmark for identifying the healed state. This value is measured from cycle 1, where no leakage occurred. To distinguish a healed actuator from a damaged one, we compare the hysteresis of the damaged and healed states measured from the same cycle.
This avoids complications stemming from the material properties changing with the ambient temperature, humidity level, and time. We, therefore, calculate the hysteresis area factor (HAF), which is the ratio between the area of the hysteresis of the damaged actuator and the HHA. The hysteresis area is calculated using the function polyarea( from the Matlab C++ Math library. The HAF of the first cycle (0.8), where no leakage occurred, was taken as the benchmark in identifying a damaged actuator.
Automatic running phase
After the manual assessment, the automatic robotic system performed 58 extra cycles, automatically assessing whether the actuator was properly damaged and healed in each case. The sensor data of the full 63 cycles are depicted in Figure 8, where the sensor data of the healed and damaged actuator are separately plotted. From Figure 8, we see that the sensor data drift during the 63 cycles. Therefore, the sensor data are always considered relative to the current cycle, avoiding erroneous conclusions. It is also clear from Figure 8 that both the healed and damaged hysteresis areas decrease as the number of cycles increases.

Sensor values during all 63 (un)loading cycles recorded after healing and damage of the actuator. The blue curves represent the first cycles, whereas yellow curves represent the last cycles.
This is due to two factors. First, the DA polymer network varies with time and heating cycles, which slightly impacts the material properties: smaller hysteresis values indicate higher Young's moduli. Second, the damaged area on the back side of the actuator weakens over the 63 cycles, leading to reduced healing capabilities. This is also observed when looking at the damaged area on the back of the actuator (Fig. 9B).

Picture of the back of the actuator.
To quantify the decrease in healability of the actuator through the cycles observed in Figure 8, the HHA was calculated for each cycle (Fig. 10). In Figure 10, the HHA varies throughout the cycles. These variations come from fluctuations of external environment parameters, such as the ambient temperature and the humidity level, which can have an influence on the DA polymer network and the healing capacity. However, a clear descending trend of the HHA is visible. More specifically, the HHA decreases at a 425 bar Ω (see regression curve in Fig. 10). The HHA curves drop below the operational healing benchmark at cycle 54. During the cycles 54 to 56, the actuator does not heal properly.
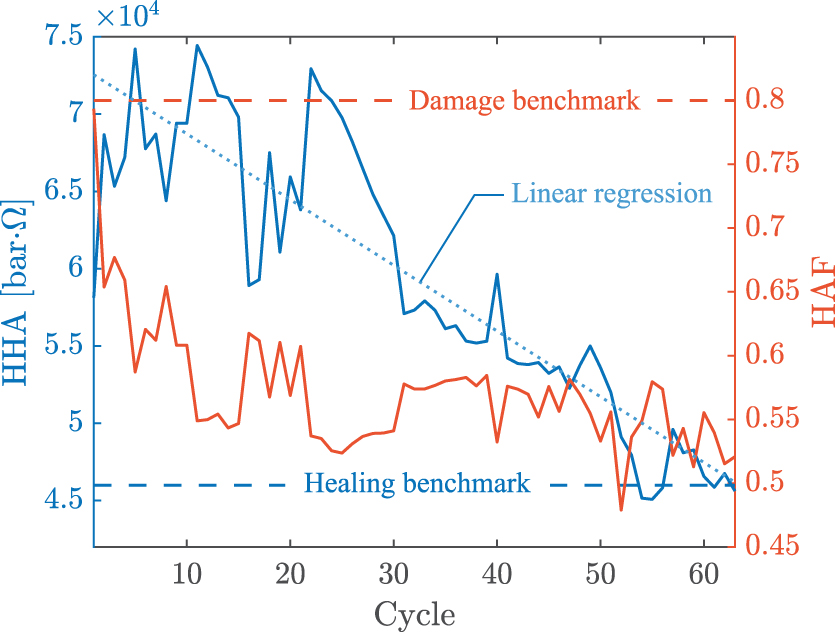
HHA, with the benchmark indicating the defined limit for an operational actuator, and the HAF, with the benchmark indicating the defined limit for a damaged actuator, calculated for each of the 63 (un)loading cycles.
After this, from cycles 57 to 60, the calculated HHA goes back above the benchmark, which indicates that the actuator could potentially heal again, but at cycles 61 and 63, the HHA again falls below the benchmark. Therefore, from cycle 53, the actuator will never properly heal again. We consider this cycle to be the maximum repeatable healability of the tested actuator. The healability of the SH actuator is, therefore, not infinite experimentally. This is due to the fact that repeated puncturing with a blade causes uneven edges that will not perfectly fit back together and will, therefore, fail to heal.
The HAF was also calculated for each cycle (Fig. 10) to check whether the actuator was correctly damaged. Since the HAF stayed consistently under the defined benchmark (i.e., 0.8), it was assumed that the actuator was properly damaged during each cycle.
Discussion
The method we proposed to autonomously and automatically assess the repeatable healability of SH polymers is versatile, which means that it can be easily adapted to a range of actuator types, sizes, and damage locations. These parameters can be altered based on the material properties, durabilities, and required applications, with our application-based benchmark providing a metric to quantify these functionalities. An actuator made of a softer material might require a moving cut instead of a sudden puncture, since the latter would just deform the material and not damage it.
Future versions of the proposed method could categorize damage types, such as slicing, puncturing, tearing, delamination, or fatigue, and investigate the effects of each. 1 Here we look only at macroscale “stabbing,” which replicates a sudden impact with a sharp object, but different damage types will differ in their local/global effects and sizes, and temporal duration.
Similarly, we use only one metric to evaluate the healing, though the extent and type of healing required are heavily dependent on the application. We consider healing at the actuator level and not on the material level. This means that the actuator could be functional and considered as healed, whereas the Diels–Alder crosslinks at the damage location are not fully rebonded. Since this study focuses on a soft pneumatic actuator with 80 mm chambers, only macroscale stabbing damages are considered.
The proposed autonomous method for testing the repeatable healability of SH actuators provides accurate and unbiased data in comparison with manual methods reported in the state of the art. However, one step might still be biased: the healing and damage benchmarks. These were set for the healed and damage actuators (HHA and HAF) by an external operator during a manual assessment phase that lasts five cycles. During this phase, the operator assessed the effective healing and damage of the actuator based on auditory and visual cues such as the sound of a pneumatic leak, the bending angle of the actuator, or the mark of an incision.
This technique was found sufficient to show the proof of concept. If the actuator has a dedicated application, a more objective technique could consist in measuring the actual characteristics of the actuator, such as its bending angle and/or actuation force, and set the HHA and HAF benchmarks based on the objectives of the targeted application.
Conclusion
This article presents a method to automatically and autonomously assess the repeatable healability of a soft pneumatic SH actuator, enabling fair and structured comparisons between different SH materials. The proposed robotic system is capable of repeatedly damaging the soft actuator at a specific location with a sharp blade, as well as providing heat and rest time for its healing. The hysteresis of an embedded strain sensor indicates whether the actuator is damaged or healed: we propose and demonstrate a quantitative thresholding method to determine this. Our approach allows a specific value of “repeatable healability” to be automatically assigned to each material—in our example, 53 cycles were withstood before failure.
The failure in healing is due to the fact that repeated puncturing with a blade causes uneven edges that will not perfectly fit back together and will, therefore, fail to heal. In future studies, the developed system will be used to benchmark a range of SH actuators, with different materials and for different applications, combining multiple damage types, locations, and conditions. The resulting knowledge of the material and application-level strengths and vulnerabilities will be used to strengthen the morphology through iterative design and manufacture, enabling the application-matched optimization of SH actuators for deployment in hazardous environments.
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This study has received funding from the SHERO project, a Future and Emerging Technologies (FET) program of the European Commission (grant agreement ID 828818), the personal FWO grants of Terryn (FWOTM784) and Legrand (12Y8622N), and from EPSRC DTP EP/R513180/1.
Abbreviations Used
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.