
Abstract
This article provides an overview of the current research on gender in human–robot interaction (HRI) including a discussion of the effects of gender characteristics in robotics design (robot gender), gender differences on interaction with robots (human gender), and some interaction effects between the two. The article also reviews research that examined the impact of the interaction between humans and robots with regard to robot appearance and behaviors, and situational factors, such as tasks and roles. Although the current state of research findings is complicated, it appears that even simple gendering of robots by manipulation of voice and name can affect humans' feelings and behaviors toward robots. These effects vary and are dependent on other factors, including human gender. Future research should focus on gender stereotypes, cultural influences, and robotic applications in various fields. At the same time, we should consider if gendering of robots, for given roles, is really necessary to encourage interactions between humans and robots.
Introduction
Robots were originally developed for industrial use, such as in factories, but a new generation of robots has been designed to achieve symbiosis with humans and these robots are starting to appear in other venues. Natural interaction with humans incorporates several technologies such as voice synthetization, voice recognition, eye contact, and body motions. Human–robot interaction (HRI) is a field of study dedicated to understanding, designing, and evaluating robotic systems, and exploring human factors for this quality of this human–robot symbiosis. 1 Studies of this research discipline have originally been based on the theory of “media equation” proposed by Reeves and Nass, 2 arguing that humans tend to interact with artificial medias including computers in the same way as with humans.
HRI research has developed many robots that are designed to act in actual situations of daily life. For example, “NAO,” shown in Figure 1, was developed by Aldebaran Robotics and has been used in many HRI studies as a representative research platform. 3 “Robovie” shown in Figure 2, a human-sized mechanical humanoid robot developed by Advanced Telecommunications Research (ATR) Intelligent Robotics and Communication Laboratories (Japan), has been used in several experiments and field studies for HRI, including museums and schools.4,5
Small-sized humanoid robot “NAO” as a research platform in human–robot interaction (Copyright © 2006–2016, Aldebaran Robotics. All rights reserved).

Human-sized humanoid robot “Robovie” as a research tool in human–robot interaction (developed by ATR Intelligent Robotics and Communication Laboratories, Japan).
Some robots have already been used in medical fields. For example, “Paro” developed by Intelligent System Co. Ltd. (Japan), is a famous robot that provides mental health therapy (see Fig. 3); it has been introduced at care houses for the elderly in some countries. 6 “ifBot” shown in Figure 4, a child-sized humanoid robot developed by ifoo Co. Ltd. (Japan), communicates with humans. The communication function is based on utterances; the aim is to prevent dementia among elderly persons who live alone. 7 “Kasper” shown in Figure 5 was designed at the University of Hertfordshire (United Kingdom) as a therapeutic “toy” for children at the middle- to lower-end of the autistic spectrum, who have limited ability to interact or communicate with the outside world. 8 Osaka University in Japan has developed android robots resembling humans as shown in Figure 6. Some studies have explored application of these robots to perform nursing care in hospitals. 9

Seal-like therapeutic robot “Paro” (developed by Intelligent System Co., Ltd., Japan).

Communication Robot for the Elderly “ifBot” (developed by ifoo Co., Ltd., Japan). Used with permission.
Small-sized humanoid robot “Kasper” as a therapeutic “toy” for children with autism spectrum disorder (developed by the University of Hertfordshire). Used with permission.

Female android robot developed by Osaka University, Japan (right: a woman; left: the android resembling the woman). Used with permission.
These robots, acting in daily life capacities, have many characteristics similar to humans, such as voice, motion, and human-like appearance. Thus gender characteristics are one of the most important considerations in robotics design to influence interaction between robots and humans. Daily life applications of HRI include domestic areas, schools, and hospitals. Previous studies of gender-specific medicine revealed several gender differences. Gender influences human–human interactions, and it is a reasonable assumption that robot gender would likewise influence robot–human interactions. Furthermore, interactional effects in conjunction with other factors such as situational effects are likely to influence robot–human interaction.
Some studies focusing on gender have recently appeared in HRI; however gender issues have not been sufficiently addressed, because the focus has been on technologic factors and other human factors. In the near future as the use of robotics increases in medical fields gender-specific perspectives should be more explicitly considered.
This article provides an overview of the current research on gender in HRI from three perspectives: gendered features of robotics design (robot gender); effects of human gender on interaction with robots (human gender); and interaction effects between the gender factors of both humans and robots, and between gender and other factors. The article also includes a discussion about the direction of future research.
Robot Gender
One of the important issues in HRI is how interaction with humans can be encouraged by endowing robots with human-like characteristics. These characteristics include human-like appearance; natural language communication with voice; and motions, such as eye contact and joint movement/position. Gender has also been considered as an important characteristic. Some studies investigated effects of robots with gender-specific properties (so-called “gendered robots”) on human psychologic and behavioral reactions toward these robots. In these studies, methods of gendering robots included: appearance; voice; and manipulation of names and pronouns that were used in the instructions of the experiments and surveys; or a combination of these factors.
In a comparison experiment between a mechanical humanoid robot and an android with a female appearance, Carpenter and her colleagues 10 suggested that participants (19 university students in the United States; male N = 9; female N = 10) preferred the female robot for in-home use. Niculescu and her colleagues 11 conducted an evaluation experiment (N = 8) for Question & Answer (QA) systems with computer graphic (CG) characters on a computer screen (so-called virtual robots or agents) with three types of heads: feminine; masculine; and gender-ambiguous. The researchers found that participants were more comfortable, more confident, and less tense when using the system with the feminine character, compared with the other systems.
However the impact of robot gender is actually not simple. As discussed in the section “Interaction Effects,” there are interactions with situational factors such as task and context; and human factors, including gender, educational background, and culture. In other words, gender preference in robotics design is dependent on the humans interacting with robots and the situations in which they interact.
Human Gender
Whether men or women are more likely to prefer or dislike robots is also an important issue in HRI. For example, a gender with a stronger aversion to robots means that gender will receive fewer services from robots. According to a social survey of 238 participants in Japan (male N = 146; female N = 92), Nomura and his colleagues 12 suggested that females had more negative attitudes toward interaction with robots than males. Moreover, the same research group 13 found in another experiment of interactions between a mechanical humanoid robot and humans (male N = 22; female N = 16; in Japan) that females had more negative attitudes toward the social impact of robots; however there were no gender differences in anxiety toward robots. Moreover the results suggested a gender difference in how attitudes and anxiety toward robots affected personal behaviors, such as the distance maintained between humans and robots and time spent interacting with robots.
In an experiment conducted in New Zealand by Kuo and her colleagues, 14 in which humans (male N = 24; female N = 33) interacted with a mechanical robot for healthcare, males had a more positive attitude than females about the usefulness of the robot and toward the possibility of using it in the future. Lin, Liu, and Huang 15 conducted a social survey with 39 parents of junior high school students (male N = 17; female N = 22) on their perceptions of educational robots. The results showed that males, in comparison with females, perceived a greater usefulness of educational robots and expressed more willingness to support children in the robotic teaching–learning process.
The existing studies seem to show that males, compared to females, are more likely to prefer robots. Preference for the gender assignment of robots is dependent on the robots' physical and behavioral characteristics and situations in which the interaction occurs. Moreover, there are gender differences in the relationships between psychologic states and behaviors, as shown by Nomura and his colleagues. 13
Interaction Effects
Gender factors have several types of interaction effects: robot and human gender interaction; other robot and human factors; and situational factors.
Interaction between robot gender and human gender
From the perspective of robotics design in daily life application, there is a realistic issue of whether males and females prefer robots with the same or opposite gender. To explore this issue, there must be investigation of interaction effects between robot gender and human gender.
Siegel, Breazeal, and Norton 16 conducted an experiment at a science museum in the United States, where a humanoid robot asked visitors (male N = 76; female N = 58) to give a donation. The robot in the experiment had a non-gendered appearance, and gender was manipulated by voice quality (pre-recorded human masculine and feminine voices). The results showed a cross-gender effect. Male participants rated the female robot as more credible and trustworthy than the male robot, while female participants rated the male robot as more credible and trustworthy than the female robot.
Alexander and her colleagues 17 conducted an experiment in the United States, where participants (male N = 24; female N = 24) solved puzzles while cooperating with a doll robot. The robot in the experiment had a non-gendered appearance, and gender was manipulated by voice (computer-generated voices) and name (Charley/Charlotte). These results also showed a cross-gender effect. Participants interacting with the robot of opposite gender felt more comfort than those who interacted with the robot of the same gender.
Koulouri and her colleagues 18 found another type of interaction between human gender and robot gender. This experiment (male N = 31; female N = 25; in the United Kingdom) was based on a navigation task in a town using computer-mediated communication between human instructors and robot followers. Robot followers in the experiment were actually participants in the experiment. This fact was not disclosed to the human instructors, and neither instructor nor follower could see the partner's appearance. In comparing 4 types of gender pairs of instructor and follower (a total of 28 pairs), the pair configuration of male instructor and female follower had better performance on the task than other paired configurations.
Kuchenbrandt and her colleagues 19 reported a different type of interaction between robot and human gender. In their experiment, 73 German participants (male N = 38; female N = 35) performed sorting tasks of items on a touch-screen table by using instructions given by a small-sized humanoid robot (NAO mentioned in the Introduction). Robots were gendered by computer-generated voices and by name (NERO/NERA). The study showed that female participants completed the task equally fast regardless of the robot gender, while male participants were faster in completing the task when they interacted with the male robot.
Interaction between robot gender and other human factors
Some studies demonstrate interaction effects of robot gender with human factors other than gender.
Eyssel and Hegel 20 investigated how robot gender presented by facial cues can be related to human gender stereotypes for traits and tasks. The experimental method manipulated the simple face of a robot by adding short hair (male robot) or long hair (female robot). Participants (male N = 30; female N = 30; in Germany) were exposed to photographs of these robots on a computer screen, and then asked to identify if the robots had stereotypically masculine traits (e.g., assertive, aggressive) and stereotypically feminine traits (e.g., empathic, delicate). The participants were also asked about the robots' suitability for stereotypically masculine tasks (e.g., transporting goods, steering machines) and stereotypically feminine tasks (e.g., child care, household maintenance). The results revealed that the short-haired male robot was perceived as more masculine than the long-haired female robot, and stereotypically male tasks were perceived as more suitable for the male robot.
Nomura and Takagi 21 explored interaction between robot gender and humans' educational backgrounds. Participants (Japanese university students; natural science and technology N = 14; social science N = 25) observed a small humanoid robot gendered only by names (Taro and Hanako; gender-stereotyped names in Japan) and then reported impressions of the robot. The results suggested that natural science participants, compared to social science participants, felt that the male robot was more assertive. For the female robot, there were no differences.
Interaction between robot gender and situational factors
Tay, Jung, and Park 22 investigated effects of robot gender and occupational roles of robots. Their experiment prepared two occupation scenarios for robots (healthcare and security). A humanoid robot, with a non-gendered mechanical appearance, was gender manipulated by computer-generated male and female voices and typically gendered names (John and Joan). Participants (male N = 84; female N = 79; in Singapore) interacted with the robot, and then reported their attitudes toward and perceptions of the robot. The results showed a gender stereotype of occupational roles; the male robot was preferred in the security scenario and the female robot was preferred in the healthcare scenario.
Interaction between robot gender and other robot factors
Crowell and his colleagues 23 manipulated gender of a mechanical robot using a masculine/feminine synthetic voice and gender-specific names (Rudy/Mary), and altered the entity conditions: the disembodied condition presented only voices from a speaker and the embodied condition presented the robot with the voices. First, participants (male N = 23; female N = 21; in the United States) verbally responded to a survey presented by the voice-only entity or embodied robot entity. Next, they responded to another survey for evaluation of the entities. The results revealed an interaction effect between robot gender and entity condition. In other words, participants perceived the female gendered voice-only entity as more reliable than the female gendered robot, while the male gendered voice-only entity was perceived as less reliable than the male gendered robot.
Interaction between human gender and other robot factors
Other factors than gender influence the interaction between robots and humans. A survey conducted by Strait, Briggs, and Scheutz 24 suggested an interaction effect between human gender and the behaviors of robots. In this survey conducted through the internet, participants (N = 510; from the United States; 62% male) were exposed to videos depicting a humanoid robot instructing a human confederate on a simple task. Participants were then asked to report their impressions of the robot. There were two possible conditions for behaviors of the robot. In the polite condition, the robot gave instructions containing one or more positive politeness strategies (e.g., “great job”). In the direct speech condition, the robot gave the exact same instructions without the politeness. The interaction effect showed that polite speech improved the impression ratings of female participants, while this improvement did not appear in ratings of male participants.
Tung 25 found an interaction effect between human gender and appearance of robots in an experiment investigating children's perceptions and judgment of the degree of human likeness of robots. The experiment prepared 12 images of humanoid robots having different degrees of human-likeness. Children were exposed to these images (138 boys; 129 girls; in Taiwan; ages 8–14 yr) and were then asked to evaluate each robot for attractiveness. The results suggested that boys were attracted to the images of robots with a mechanical appearance, while girls were attracted to images of robots with human-like appearance.
Schermerhorn, Scheutz, and Crowell 26 experimentally investigated how the presence of robots affects humans' attitudes toward them. In an experiment conducted in the United States (male N = 24; female N = 23), half of the participants completed a pencil–paper questionnaire on attitudes toward robots. The other half verbally responded to the same questionnaire items, which were verbally presented by a robot having a mechanical appearance. The results revealed that female participants who took the pencil–paper survey had the least positive attitude toward robots. This group was less positive than female participants who verbally responded to the robot and also less positive than male participants who took the pencil–paper survey.
Interaction between human gender and situational factors
One study suggested an interaction effect between human gender and structure of tasks that humans perform with robots.
Mutlu and his colleagues 27 conducted an experiment in the United States, where a humanoid robot (Honda ASIMO) and participants (male N = 16; female N = 10) performed a 2-player video game on a big screen. In the experiment there were two possible manipulations to the structure of the game. In one manipulation, the robot and participant competed against each other for their own scores (competitive task). In the other manipulation, the robot and participant cooperated for total scores (cooperative task). Participant evaluation after the game showed that men reported higher positive effects in the competitive task than in the cooperative task, while women did not show this difference.
Future Directions of Gender Issues in HRI
Implications from the existing studies
In the overview of existing studies, it was found that gender issues in robotics for daily life applications are very complicated; however even at this stage, there are important implications. First, gendering of robots can influence humans' feelings and behaviors toward robots. Second, these influences are very complex and depend on several factors including human gender.
Humans' feelings can be affected by the male/female-like appearance of robots, or even by simple gendering by voice and name for a robot with a gender-neutral mechanical body. As a result of these feelings, human behavior toward robots is altered. The implication is that when humans interact with objects, they are motivated to assign gender. In fact, an experiment conducted by Nomura and Hayata 28 suggested this motivation. In this experiment a robot had a gender-neutral appearance (“ifBot” mentioned in the Introduction) and no gendering of the robot was performed. Nevertheless, participants assigned gender to the robot, and the gender assignment affected their behaviors toward the robots, such as the numbers of smiles during interaction with the robot and the amount of interaction time.
However influences of gendered robots vary and are dependent on other factors including human gender. The problem of gender preference in the design of robots is hard to resolve at the current stage because some studies suggest cross-gender effects while others suggest the opposite results. Moreover, responses to robots can be affected by other human factors, such as education and experiences; other robot factors, such as appearances and utterances; and situational factors, such as the roles that robots fill and the potential tasks that robots and humans might perform together affect the relationship.
Necessity of focus on stereotypes and cultures
The situation revealed by the HRI studies is complex; however there is one important concept to consider. For humans, gender stereotypes modify the effects of gender, thus feelings and behaviors toward robots could also be influenced. In other words, gender assignment to a robot triggers gender stereotypes and evokes expectations for robot roles and behaviors. Furthermore, output from a robot, invites psychologic and behavioral reactions from humans (see Fig. 7). In addition, differences in male and female stereotypes can modify interactions.
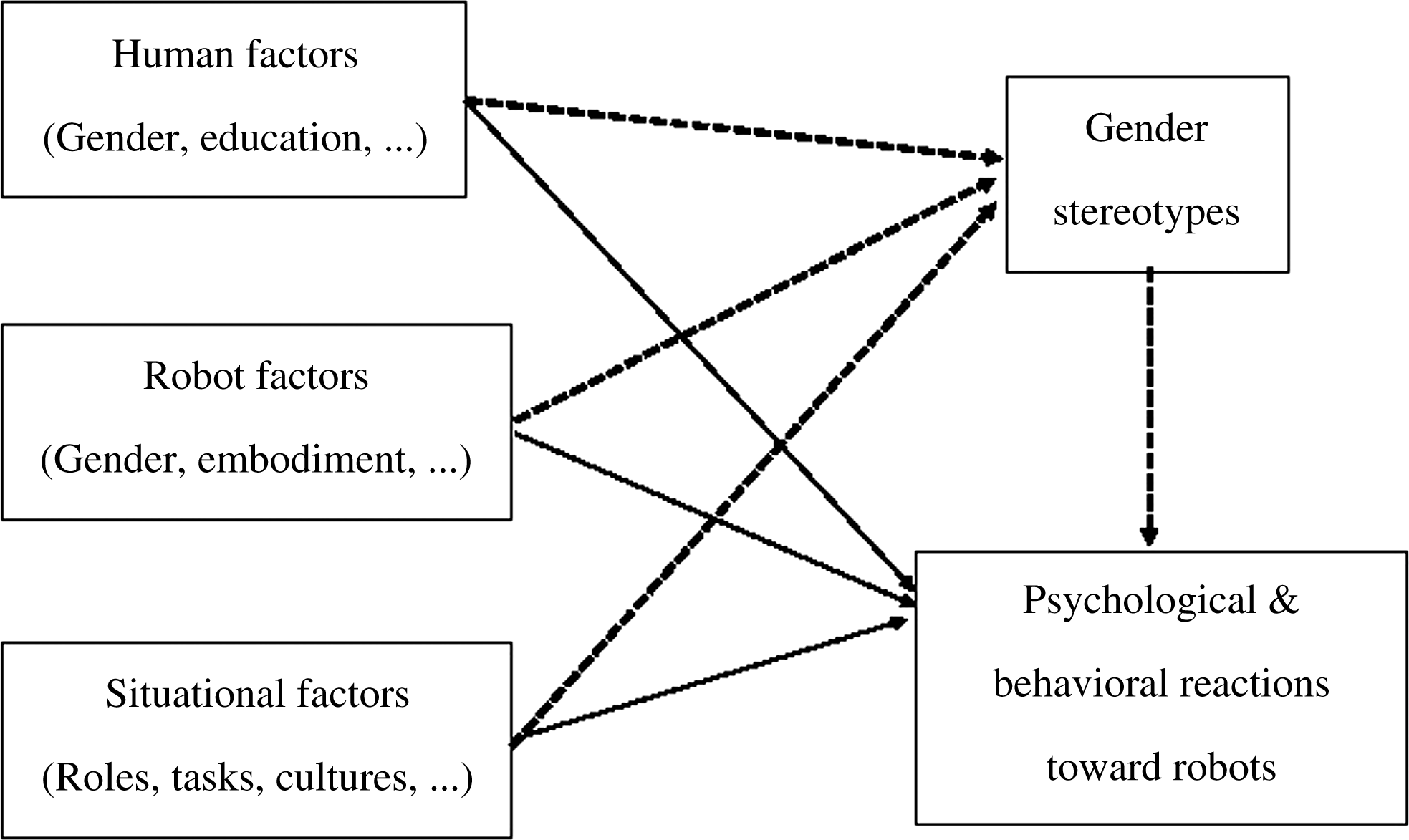
A psychologic model of gender effects in human–robot interaction.
Some studies have focused on gender stereotypes. The research group of Eyssel in Bielefeld University conducted a series of experiments on gender stereotypes and tasks connected to robot gender19,20: male/female robots were expected to perform stereotypically male/female tasks. Tay, Jung, and Park 22 found that robot gender preferred for healthcare applications was opposite to that for security applications. This suggests that gender stereotypes for tasks affects preference of robot gender for specific tasks. Nomura and Hayata, 28 showed that humans' gender values were related to the robot's having a gender-neutral appearance without manipulation of robot gender.
Culture affects gender stereotypes. Nomura and his colleagues 29 revealed that there are cultural differences related to the tasks and roles that robots would perform. Thus we have to consider gender perspectives and cultural viewpoints for specific types of robotics applications. In fact, Nomura and Kinoshita 30 suggested that people in Japan preferred a female robot playing the role of guide (females typically perform this job in Japan.). When considering robotics applications in a specific area, one should also focus on cultural influences to maintain gender stereotypes related to that area.
Ethical issues of gendered robots
When gender stereotypes are considered as a factor influencing interaction between humans and gendered robots, there is a serious problem concerning whether to rely on these stereotypes in HRI to encourage interactions.
Some researchers in social sciences have criticized gendering robots in the light of gender stereotypes. Robertson 31 critically argued that gendering of robots was done by the arbitrary choice of technologists who relied mainly on common sense for decision-making. Weber and Bath 32 also pointed out that gendering of robots had the possibility of reinforcing societal gender stereotypes. De Angeli and Brahnam 33 suggested that naïve gendering of robots might cause users to demonstrate abusive behaviors toward robots that follow gender stereotypes.
Imagine a situation wherein a specific job is dominated by a gender stereotype; the domination causes a disadvantage for a specific group of people; and the problem is generally ignored by society. If gendered robots are stereotyped for this job, the stereotype is reproduced. In other words, robotics designers are contributing to concealment of the social problem. As the application of robotics continues to expand into multiple fields, it is necessary to consider the ethical implications of gendering of robots and decide if gendering is truly necessary to encourage interaction between humans and robots.
Conclusions
This article provided an overview of the current research on gender in HRI from effects of gender characteristics in robotics design (robot gender), gender differences on interaction with robots (human gender), and some interaction effects between gender factors. The article also reviewed research that examined the effects between gender factors and robotics factors such as appearance and behaviors, and situational factors, such as tasks and roles. Although the current state of research findings is complicated, it appears that even simple gendering of robots by manipulation of voice and name can affect humans' feelings and behaviors toward robots. These effects vary and are dependent on other factors including human gender. In future research, there should be a focus on gender stereotypes, cultural influences, and robotic applications in various fields. At the same time, it should be considered whether gendering of robots for given roles is truly necessary to encourage interactions between humans and robots.
Footnotes
Acknowledgments
This research was supported in part by the Japan Society for the Promotion of Science, Grant–in–Aid for Scientific Research No. 25280095.
The author deeply thanks Aldebaran Robotics, ATR Intelligent Robotics and Communication Laboratories, the University of Hertfordshire, and Osaka University for permission to use the photographs of the robots in this article.
Author Disclosure Statement
No competing financial interests exist.