
Abstract
In the past few years, collaborative robots (i.e., cobots) have been largely adopted within industrial manufacturing. Although robots can support companies and workers in carrying out complex activities and improving productivity, human factors related to cobot operators have not yet been thoroughly investigated. The present study aims to understand the subjective experience of younger and senior workers interacting with an industrial collaborative robot. Results show that workers' acceptance of cobots is high, regardless of age and control modality used. Interesting differences between seniors and younger adults emerged in the evaluations of user experience, usability, and perceived workload of participants and are detailed and commented in the last part of the work.
Introduction
Collaborative robotics (i.e., cobots) was introduced within industrial assembly lines to improve productivity and support workers 1 through an interactive process called human–robot collaboration 2 (HRC). Within the context of Industry 4.0 revolution, which is characterized by the digital transformation of the manufacturing systems,3–5 cobots and operators share working-space and -tasks.2,6–10 HRC aims at combining the accuracy and tirelessness of cobots (i.e., prolonged repetitive tasks) with the human's flexibility 2 and dexterity (e.g., problem-solving, creativity). 3 To conform with the workspace safety conditions,11,12 the cobots will define a set of actions considering the working environment and the operators' spatial positions and actions (i.e., “teaching”).
The worker controls these operations through specific interfaces (i.e., teach pendant), innovative input devices (e.g., smart cameras, voice recognition systems), and direct contact.7,13,14 Besides, considering the users' perceptions of the cobot is crucial to enhance the HRC. Indeed, cobots may support operators in carrying out working activities13,15–18 and may withstand them at the cognitive level (e.g., reducing memory effort, helping in decision-making).8,19,20 These features are relevant in an era of increasing age of the workforce.15,16
Senior operators may obtain the highest benefits from this technology, 1 as they show a lower resilience to work due to age-related functional decline and thus a higher need for assistance to achieve the best performance. 21 The requirement to pursue this goal is that they perceived the technology as acceptable and usable.14,22,23
Individual differences (e.g., age) are relevant for the introduction of cutting-edge systems at workplace. A negative attitude toward robots could prevent their acceptance and adoption, 24 although they are intended to help in specific tasks. 25 Furthermore, considering the user experience (UX) and usability, in analogy with other types of interfaces, 26 the interaction with cobots has to be pleasant,27,28 intuitive, smooth (e.g., manual, tablet- or gestures-based),14,29 and cobots have to be easy to use.29,30 Finally, it is relevant evaluating the task load27,28 in HRC (e.g., mental, physical demand).31,32
The present study investigated the extent to which participants' age (i.e., adults, senior workers) and cobot control modality (i.e., manual, tablet) affect the acceptance, UX, usability, and task load related to cobot usage. In the literature, the majority of studies reported that seniors demonstrated lower technology acceptance compared with younger people,15,20,21,33,34 although often the former deny the prejudice of being less open to novel technologies. 35 In the manufacturing context, a reduced acceptance is related to aged workers' lower familiarity with advanced technologies. 34
We predicted a lower acceptance for senior workers, which could have a negative impact on their UX. No specific prediction was made on usability as a function of age since there is limited literature. 36
We expected diverse evaluations considering cobot's control modality. The tablet control system could be more cognitively demanding 14 than the manual one. We hypothesized that older operators would perceive the tablet as more mentally demanding, and less pleasant insofar as they tend to prefer tangible interfaces.37,38 In contrast, adult operators would evaluate more positively the tablet since they are accustomed to graphical user interfaces (GUIs). 39
Materials and Methods
Participants
Twenty active workers took part in this study voluntarily. In the Senior group, the age was equal or more than 55 years (
Procedure
The experiment took place in a quiet laboratory at the University of Padova, where the cobot is installed. At the beginning of the experimental session, each participant was provided with an informative note and signed informed consent. They were then introduced to the experimental setting through a scenario that would help them imagine the specific working situation.
Afterward (Fig. 1a), the participant was asked to fill out a modified version of the Technology Acceptance Model (TAM) questionnaire (described below). The workbench's height, on which the participants had to accomplish the various working operations, was adjusted to meet specific ergonomic criteria (i.e., workbench height = height of elbow bent and parallel to the ground −150 mm). A familiarization phase (i.e., training) was carried out. Participants learned how to interact with the cobot by direct contact (i.e., manually guiding) and using the tablet (i.e., teach pendant). After the training, participants were instructed (i.e., written instructions) about the next two task sessions, each composed of a teaching phase, a collaborative task accomplishment, and a battery of questionnaires (i.e., NASA-Task Load Index [TLX], TAM, UX, and System Usability Scale [SUS]).
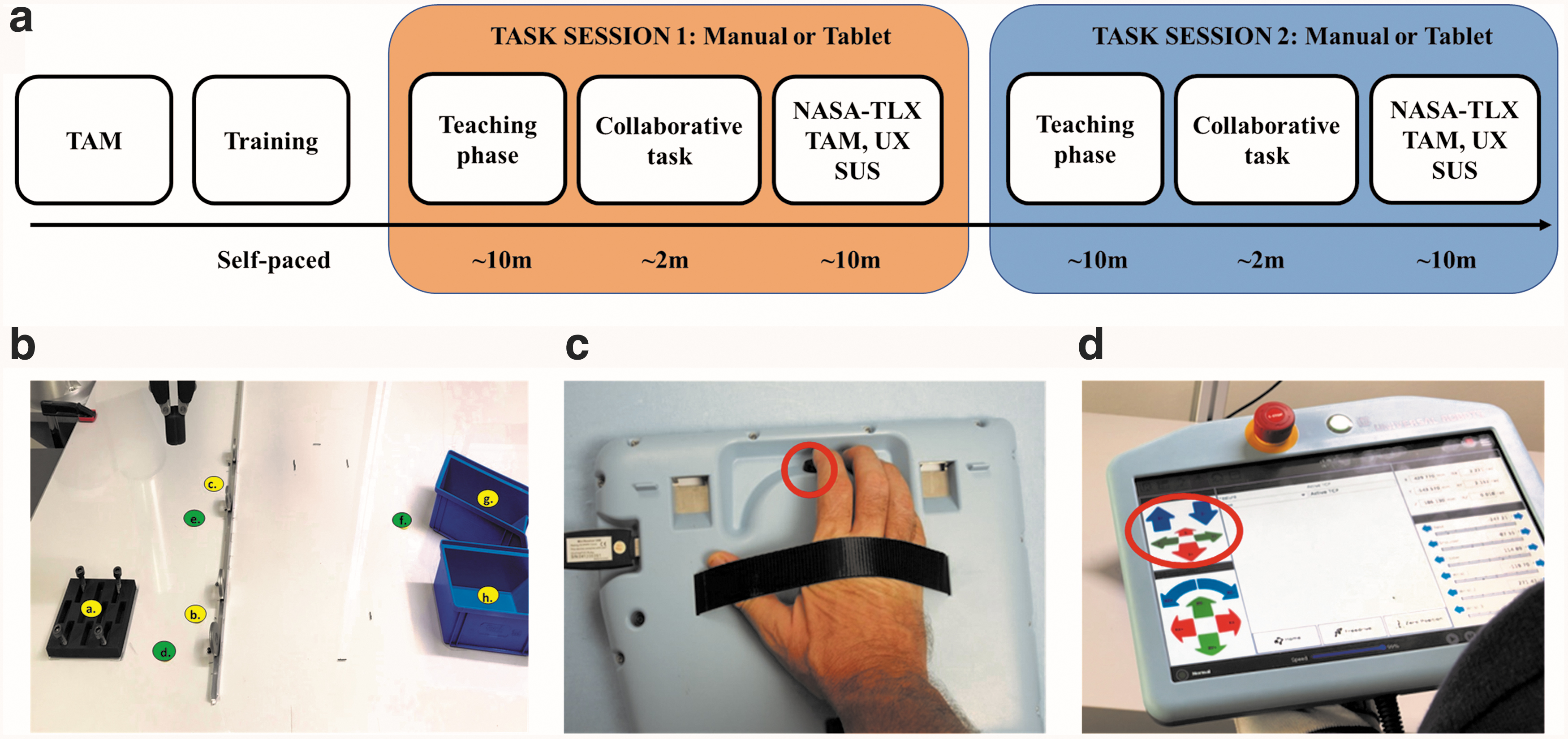
In the teaching phase, the participants had to interact with the cobot (manually and with the tablet in separate task sessions), guiding it inside the working space (i.e., eight target positions, Fig. 1b).
In the manual condition, participants physically moved the cobot with one hand, while with the other hand, they were holding down an unlock button placed on the backside of the tablet (Fig. 1c). In the tablet condition, participants used only the tablet (i.e., directional arrows depicted on the screen) to move the cobot (Fig. 1d).
After the teaching phase, they were asked to accomplish a collaborative task (i.e., screwing a bolt in a washer on a perforated metal plate) to experience the actual HRC. Specifically, the cobot provided washers and bolts to the participants by releasing them in a specific box, while the participant placed each washer and screwed bolt on each hole of a perforated metal plate.
The order of the two control modalities of the cobot was counterbalanced across participants.
Tools and measures
Cobot
The cobot employed in this study was the UNIVERSAL ROBOT (UR10e). It was installed on the workbench of an assembly workstation (Fig. 2a). The UR10e satisfies a set of strict safety requirements (ISO/TS 15066:2016) needed for operating near the workers. It presents a high payload (10 kg) and the capability to reach different positions in relatively large workspaces. The robot system is composed of a robotic arm (Fig. 2b) and a “teach pendant” (i.e., a tablet with the user interface, Fig. 2c).
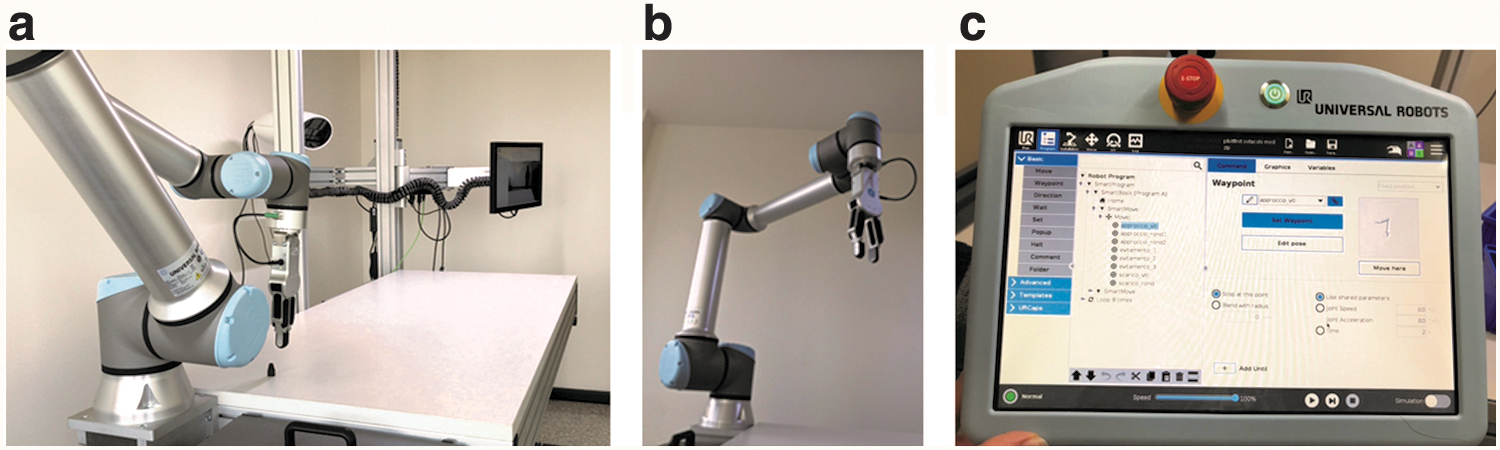
The programming interface enables to create virtual boundaries around the cobot to avoid accidental collisions with other objects/walls. The UR10e automatically stops in case of attempts to move it beyond these safety boundaries. The utilized end effector was a gripper that allows the robot to collect/release working objects.
Video recording
Two GoPro Hero 4 (GoPro, Inc.) were used to video record the experimental sessions. The time on task, computed as the time required by the participant to accomplish each teaching task, was extracted by analyzing the recordings.
TAM questionnaire
The TAM 24 is the most widely employed theoretical framework for assessing acceptance. We used a revised version of the original TAM questionnaire that was utilized for evaluating the robots acceptance. 25
The tool consisted of 23 items (i.e., 7-point Likert scale; from 1 = strongly disagree to 7 = strongly agree), related to the following constructs: perceived ease of use (PEOU; the degree to which a person believes that using a technology is effortless; four items), perceived usefulness (PU; the degree to which a person believes that using a technology would enhance his/her job performance; four items), intention of usage the robot (IU; three items), and individuals' attitude toward using the cobot (ATT; three items), perceived enjoyment (PE; the degree to which using a technology is perceived as providing joy; four items), and need to belong (NB; as the belonging feelings that influence the intention of continuously using a technology; five items).
The first four constructs (i.e., PEOU, PU, IU, ATT) belong to the original TAM, whereas the last two constructs (i.e., PE, NB) were added as external variables to assess the influence of motivational aspects following the study of Park and Del Pobil. 25 At the beginning of the experiment, the TAM was administered to evaluate the acceptance level before the system usage.
System Usability Scale
The usability was assessed utilizing the SUS. It includes 10 items (i.e., 5-point Likert scale; from 1 = strongly disagree to 5 = strongly agree). The overall score ranges from 0 to 100.42,43
User experience
UX was evaluated by adapting the questionnaire created by Shirzad and Van der Loos. 30 The first two parts of the questionnaire were related to the robot (e.g., supportive) and the interaction (i.e., pleasant) using a set of descriptive adjectives (i.e., six for robot evaluation and three for interaction evaluation; 5-point scale, from badly = 1 to well = 5). The third part, adapted from the User Engagement Scale, assessed the perceived time flow, engagement, satisfaction, and usability (nine items; 5-point scale, from badly = 1 to well = 5).
NASA-Task Load Index
The NASA-TLX32,44 was employed for assessing the task load. The tool includes six subscales that investigate: mental, physical, and temporal demands, perceived performance, effort, and frustration. Each subscale presents a 20-step bipolar scale ranging from 5 to 100. It is possible to consider the six subscales separately 45 or computing an overall score. 44
Statistical analysis
Data were compared between Groups (Adults, Seniors) and control Modality (Manual, Tablet). In the case of a nonnormal distribution of the data, we used ordinal logistic regressions and Friedman tests. For the ordinal logistic regression, Cliff Delta was reported to estimate effect size (ES). When data were normally distributed (i.e., 2 × 2 analysis of variance [ANOVA], Group between-factor, Modality within-factor), partial eta squared (
Results
Acceptance
A series of two-predictor logistic models (i.e., one for each subscale) was fitted to the data to test the effect of Group and Modality on the TAM scores (see Supplementary Table S1 for mean and
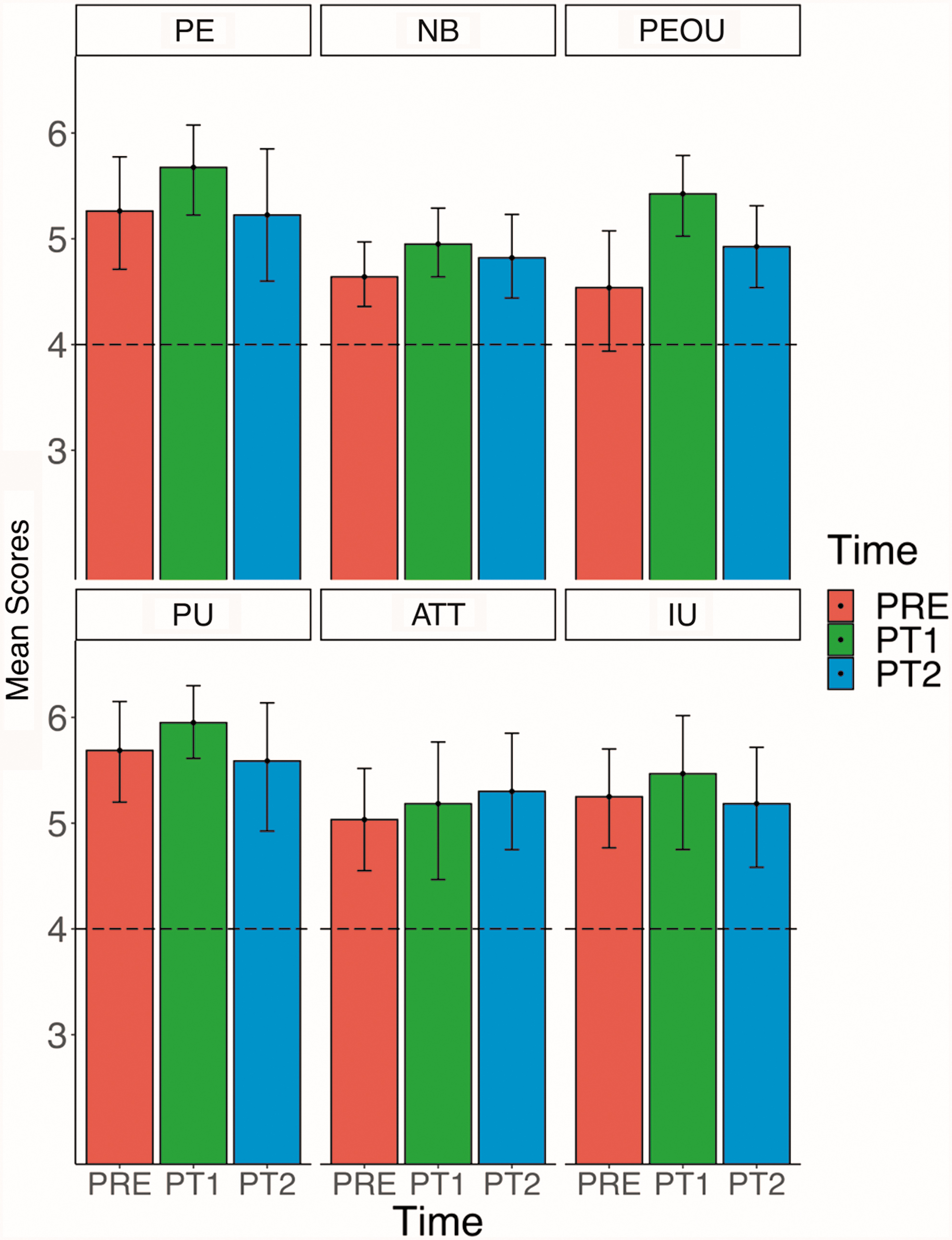
Mean score of TAM questionnaire for each dimension in the pre-test (PRE); first post-test (PT1); second post-test (PT2). PE, perceived enjoyment; NB, need to belong; PEOU, perceived ease of use; PU, perceived usefulness; ATT, attitude; IU, intention of usage. Error bars represents the standard error of the mean.
A Friedman test was assessed to investigate the effect of time (i.e., pre-test, first post-test, second post-test). A significant effect emerged for the PEOU (χ
2
= 8.343,
Time on task
The ANOVA showed an effect of Group [
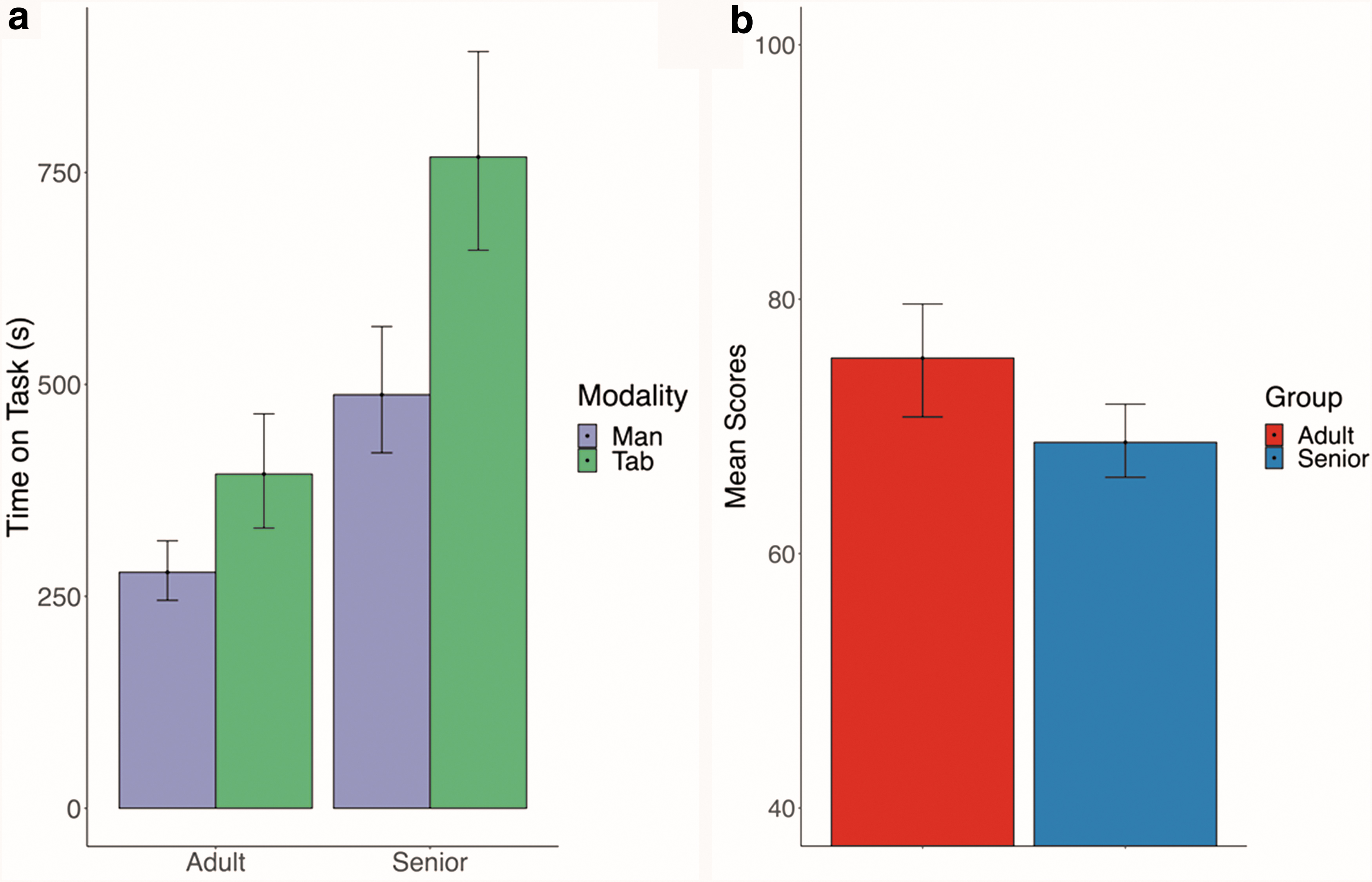
Usability
The system resulted acceptable in respect of usability (see Supplementary Table S2 for mean and
User experience
A series of two-predictor logistic models were fitted to the UX questionnaire data to test the effect of Group, Modality, and their interaction (see Supplementary Table S3 for mean and
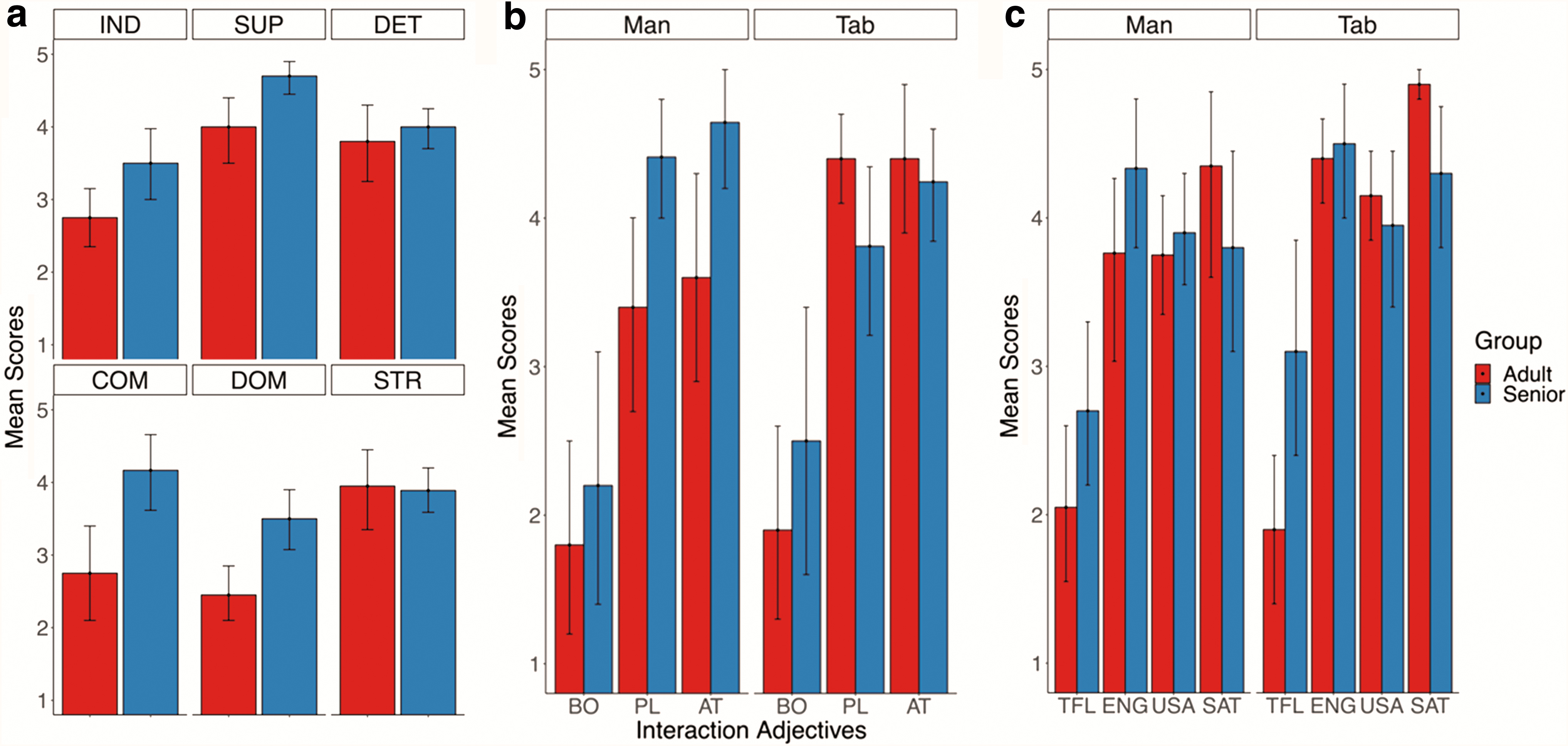
The analysis of the adjective about the interaction with the robot showed a significant Group × Modality interaction for “Pleasant” and “Attractive” adjectives (
Considering the third part of the questionnaire, a Group main effect for the Time Flow and Satisfaction emerged (
Task Load Index
A series of two-predictor logistic models (i.e., one for each subscale) was fitted to the data to test the effect of Group and Modality on the NASA-TLX scores (Fig. 6; see Supplementary Table S4 for mean and
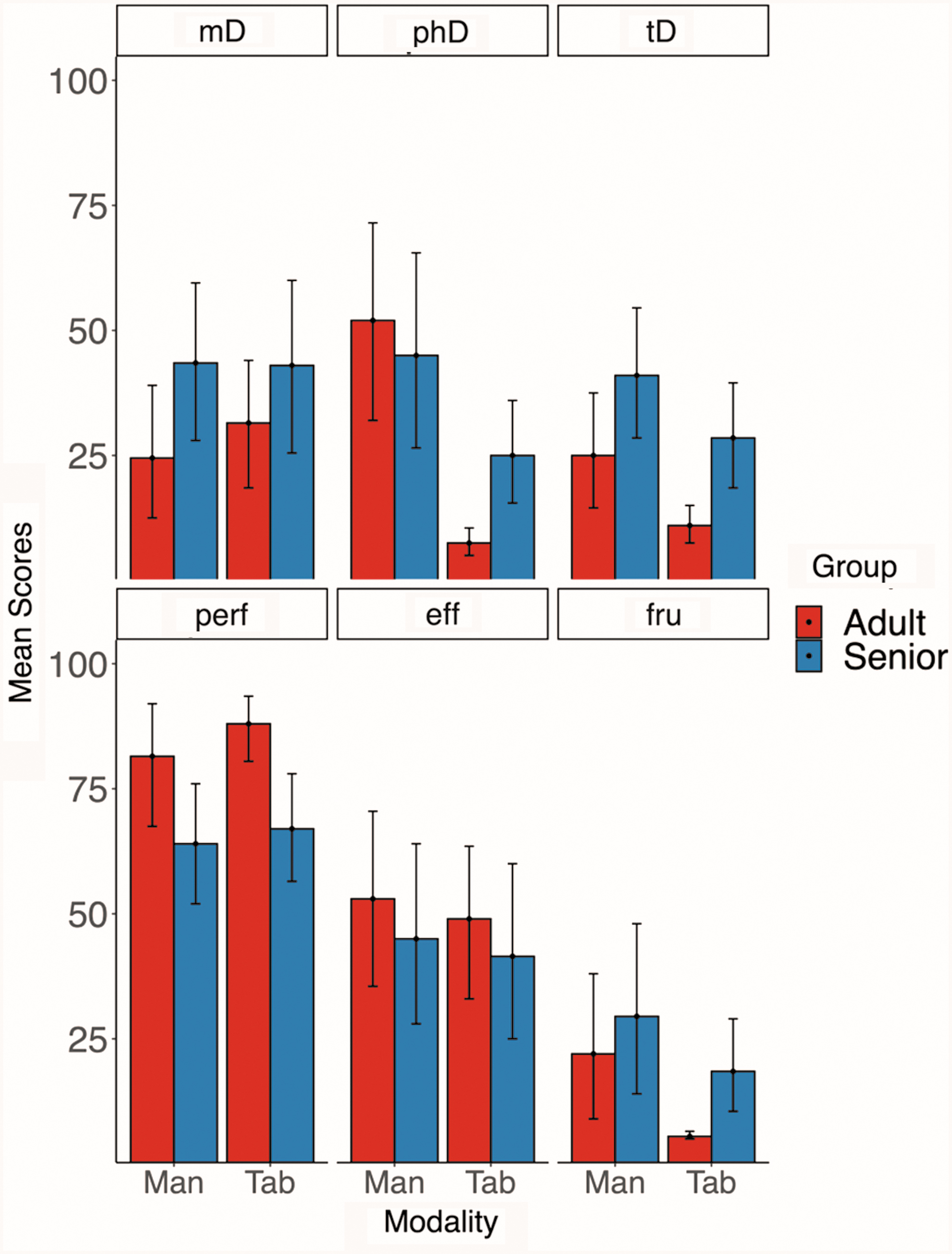
NASA-Task Load Index mean scores of the Senior and Adult worker groups in the Manual and Tablet control modality. Error bars represent the standard error of the mean scores. mD, mental demand; phD, physical demand; tD, temporal demand; perf, performance (higher score for better perceived performance); eff, effort; fru, frustration.
The physical demand showed a significant effect for Group (
The temporal demand showed a significant Group (
Considering the perceived performance, a significant effect only for Group emerged (
In regard to the frustration, a significant Group (
Discussion and Conclusions
The study investigated the Group (senior vs. adult operators) and Modality (manual vs. tablet) effects on acceptance, UX, usability, and task load related to HRC.
Interestingly, the acceptance, in contrast with our hypothesis and the majority of the literature, that underlined the presence of age-related barriers in technology adoption,34,47 high system acceptance (i.e., >4, scale median), was shown regardless of the Group (older workers 35 ) and Modality.
Also, a significant time effect on PEOU pointed out that both age groups perceived the system easier to use at first post-test than they expected before the actual interaction (i.e., pre-test). Regarding the strong relevance of PEOU on technology adoption,48,49 this result supports the idea that familiarization (e.g., training) could help individuals of any age in accepting new technology, especially cobots. 21 Moreover, we should expect a high usage behavior of the cobot (after its introduction) for both Groups, for the overall high PEOU, PU, and IU scores (i.e., >4) reported.
This result supports the TAM framework, 50 which theorizes that PEOU and PU directly influence IU and, consequently, usage behavior.
Pertaining the time on task, Group and Modality effects emerged. Older operators were slower. Longer durations were related to tablet usage. In manual control, the speed of the cobot movements was controlled by the users (i.e., quicker). In tablet control, the speed was fixed linked to the directional arrows of the tablet. The Group × Modality interaction showed that senior workers were slower than adult workers only with the tablet and could be related to their lower experience with GUIs. 39
Concerning the perceived usability, only a Group effect emerged. Senior operators perceived the cobot as slightly less usable. The overall high scores are in accordance with PEOU outcomes.
Considering the first part of the UX questionnaire (i.e., robot's adjectives), the Group's effect appeared. Interestingly, senior workers perceived the cobot as more independent and supportive. They seemed to trust the cobot as a coworker that can accomplish its tasks (e.g., repetitive activities) in an autonomous way, but, at the same time, it may support in collaborative tasks the operator (e.g., screwing). Cobots have been proven to be feasible in supporting aging workforce. 15
Pertaining to the second part of the UX questionnaire (i.e., human–cobot interaction), two significant interactions Group × Modality emerged. Senior workers rated the manual interaction as more “pleasant” than the tablet one, whereas the Adult group showed the opposite pattern. Besides, senior operators rated as more “attractive” the manual interaction. No difference appeared considering the tablet evaluation. These outcomes further support the idea that older workers reported a more positive attitude toward new technologies whenever they can directly interact with them. 51
Regarding the third part of the UX questionnaire, senior workers were more focused on performing the tasks. It is important to underline, regardless of Group and Modality, the scores were low (i.e., approximately or less than scale median). Considering the satisfaction, although the adult scores were higher, both groups showed high scoring (i.e., >3.8). This result underlines how this variable, crucial at the workplace, could be preserved in working spaces involving a cobot to carry out the working activities. 52 The high usability scores (>3.5) are in line with both SUS and PEOU analysis.
Considering the Task Load, the perceived physical demand, as expected, was higher for senior participants than adults and in the manual modality. Unexpectedly, the Group × Modality interaction highlighted that senior operators experienced higher physical demand than adults only in the tablet modality. In contrast, in the manual modality, the groups scores were high and similar (i.e., ∼50). The difference in the tablet modality could be due to the teach pendant weight, less tolerated by the seniors for their reduced strength. However, the groups scores were low (i.e., <40).
Concerning the perceived temporal demand, Group and Modality effects emerged. Senior workers' ratings were higher than the adult ones. Senior operators may feel slow when interacting with advanced technologies and may report a higher time pressure. The speed of the movements using the tablet was slower but fixed, which could explain the effect of modality. Thus, operators may perceive higher time pressure in the Manual modality in which they can decide to modulate the speed as they prefer.
Regarding the perceived performance, a Group effect was shown. Adults reported higher scores (i.e., >80) than the senior operators (i.e., 60–70). However, the senior scores were high, reflecting a sufficient/good performance, and a degree of confidence in using this tool, contrarily to the literature on aging and technology. 47
Group and Modality effects emerged pertaining to the frustration. Higher frustration was reported by senior operators and in the manual modality. However, the frustration in both groups and modalities was very low (scores <30). This result is consistent with the positive evaluation of usability and the UX.
Considering overall the study findings, we could affirm that the cobots introduction should not face severe barriers in Industry 4.0. Workers of different ages viewed the cobot not as a replacement but as a supportive and independent “colleague” who is pleasant, attractive, and satisfying to interact with.
Future experiments will consider larger samples to increase the generalizability of the results, alternative means of interaction (e.g., gestures), and more complex tasks performed in ecological settings (i.e., factory).
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This study was supported by a grant from Ministero dell'istruzione, dell'università e della ricerca (Dipartimenti di Eccellenza DM 11/05/2017 n. 262) to the Department of General Psychology and partially supported by the European Commission under Grant (ID: 826266; Co-Adapt project).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.