
Abstract
Cues delivered by agents are known to trigger mental shortcuts associated with ontological category or the kind of thing an agent is. Two such heuristics are key to considering organic and machine agents, and result in biased evaluations: the machine heuristic (MH) (if machine, then systematic/unbiased, therefore its products are good) and the nature heuristic (NH) (if natural, then pure/innate, therefore good). As machine agents such as robots are increasingly integrated into human spheres, it is yet unknown (a) if invocation of agent-cued heuristics is inherently tied to activities and (b) whether either/both heuristics are evoked when agents exhibit both organic and machinic properties (as with cyborgs). To investigate these open questions, a 3 × 2 experiment tasked individuals with considering a magazine article about an agent (organism, cyborg, robot) performing behaviors (natural, technical) to solve a widespread problem, and then evaluating the agent and its solution for markers of machine and NHs. Findings indicate that the NH may be dominant over the MH; however, this primacy may be driven by operational contexts. Post hoc analysis suggests that agent category grounds interpretations of agent behaviors that, in turn, drive biased evaluations of behavioral outcomes.
Heuristics—mental shortcuts that quickly but nonoptimally facilitate decision making—drive much of human behavior but can lead to systematic logical errors known as cognitive biases. 1 These errors manifest as people evaluate other people or technological agents, especially when cued by an agent's ontological category, or the kind of thing it is perceived to be. 2 Two ontological-category shortcuts are key to evaluating human and technological agents: the machine heuristic (MH) is the machine-cued inference of objectivity and systematicity resulting in positive credibility assessment, 3 and the nature heuristic (NH) is an organism-cued attribution of goodness (or nonorganism-cued attribution of badness 4 ) that results in assessments of normativity or goodness.5,6 Each of them has been examined narrowly: organic agents for natural activities and machine agents for informational or technical activities. It is yet unknown (a) if invocation of agent-cued heuristics is inherently tied to activities, and (b) whether either/both heuristics are evoked when agents exhibit both organic and machinic properties (as with cyborgs). To this end, this study examines agent and outcome evaluations for different task-related behaviors (natural/informational) and agents (organisms/cyborgs/robots). Findings suggest that agent-category cues function as frames for interpreting agent behavior, which in turn influences perceptions of behavioral outcomes. However, ambiguous category membership may cause equivocation in this process.
Review of Literature
Heuristics are learned over time as efficient decision-making shortcuts are stored in easy-access memory, and are flexibly applied across myriad scenarios: when facing complex or novel situations, one copes by nonconsciously substituting simpler problems and using heuristics to address them. 7 As such, heuristics are useful for navigating the vagaries, complexities, and ephemerality of social interactions, 8 especially in novel human–machine exchanges.
Heuristics cued by agent categories
Two heuristics are central to how people make shorthanded judgments about various agents: the MH and the NH. Each heuristic relies on acknowledging the kind of thing perceived and drawing on learned assumptions about that kind. MH is the attribution of machinic properties to the thing and NH is the attribution of natural properties to the thing, and these attributions foster specific judgments about those things—usually that a “machinic” or “natural” thing is somehow inherently good.
The machine heuristic
MH is activated when (a) agents deliver machinic cues that are (b) peripherally processed when MH-related beliefs are accessible, 9 (c) resulting in attributions of systematicity, randomness, and/or objectivity; activation of that heuristic (d) influences judgments about an interaction or about the information created, selected, or validated by that machine. 10 Often, the machine itself or the information it produces is preferred, 11 or considered more credible than human-sourced information. 3 However, the judgment may be positive or negative depending on prior experience and the appropriateness of those machinic characteristics in a particular context. 10 MH influences credibility ratings for various information types, from AI-produced news content10,12 to conversations with chatbots. 13 However, MH effects more often manifest for information conveyed by nonembodied social machines, and findings are inconsistent for embodied machines (i.e., social robots), embodied cues may disrupt MH activation inasmuch as they may promote it. 3 In tandem, such cues may evoke expectations about agent behaviors 14 or social roles, 15 such that it is necessary to tease apart MH influences of cued agent kind and agents' role-related behaviors.
The nature heuristic
MH's less-studied conceptual counterpart is the NH: the “ubiquitous and irresistible” reliance on “some feature of the natural world in order to represent moral, aesthetic, or social norms,”
5
where natural is “what takes place without the … voluntary and intentional agency, of man.”
16
Literature on this notion references “appeal to nature,” “nature fallacy,”a “naturalistic fallacy,”b “naturalizing error,” and “nature bias,” although the cognitive mechanism is not actually a bias but a heuristic that may lead to biased behavior. NH manifests when nature is adopted as authority or agent (akin to the divine), such that whatever is whole and innate is good, and whatever is partial or non-native is bad. The heuristic may thus be understood as a moral intuition
17
that in its simplest form (natural = good) results in one or more of these evaluative shortcuts:
A is natural; therefore, A is good. B is unnatural; therefore, B is bad. or A is natural, B is unnatural (or not natural); therefore, A is better than B.
NH is seldom empirically tested, instead more frequently invoked as explanation for attitudes related to sex roles, 18 reproductive rights, 19 antivaccination activism, 20 and genetically modified animals. 17
Nonexclusivity of ontological class cues
Although ontological-category cueing is rarely explicitly engaged as a heuristic-triggering stimulus, studies invoke ontological categories implicitly in their designs through the compared reactions to organisms and machines. For instance, people consider humans and robots differently with respect to perceived warmth and competence, 21 credibility, 22 and moral responsibility, 23 but not always for subconscious processes such as following gaze 24 and mentalizing. 25
However, clear boundaries between organism and machine do not always exist, as in the notion of the uncanny—senses of eeriness felt when agents approach but fall short of high-fidelity humanness. 26 Some work in this domain supports a categorical perception hypothesis, positing that agents may deliver cues that generate cognitive conflict when perceivers work to place the agents into human or nonhuman categories subconsciously; this conflict induces higher cognitive load, which may lead negative affect toward the target. 27 This suggests the nonexclusivity of agent-class cues—an agent may project both human- and machine-category cues with both MH and NH prompted. Although the two heuristics are conceptually divergent, whether they are empirically divergent with respect to agents' natural, machinic, or mixed-feature cues has not been examined. Understanding heuristic cueing in the latter category is of particular importance as cybernetic organisms are increasingly prominent in contemporary society, as with brain-computer interfacing 28 and bioaugmentation. 29 Because agents may convey multicategory cues, we here consider organisms and machines (as discrete category-cueing agents) and cyborgs (as category-spanning agents) and ask: (RQ1) Does an agent's cued ontological category influence the activation of NH and/or the MH?
Conflation of attribution and activity in the current literature
Both MH and NH ostensibly result in biased behavior when stimulus features (i.e., machinic or organic cues) prompt attribution of (de)valued traits (objectivity/systematicity or purity/goodness). However, the operationalization of these heuristics has been inherently conflated: MH's objectivity/systematicity attributions are only evaluated in relation to informational/technical actions, and NH's purity/goodness attributions are only evaluated for actions associated with biological processes or outcomes. Although domain specificity may be acceptable because heuristic attributions and the biased action evaluations are likely linked, this overlap ignores potentials for the inverse to be true. It is possible that a machine agent acting in noninformational capacities could be seen as better, as when an assembly line produces perfect cookies (vs. the first author's tendency to burn them). Organic agents acting in technical capacities could also be seen as more credible or reliable than machines, as with some patients' preferences for humans over robot-assisted surgery. 30 Given these possibilities, we ask: (RQ2) Does the nature of the agent's behavior influence the activation of nature and/or MHs?
Method
A 3 × 2 between-subjects online experiment tasked participants with reading a constructed story about an agent (organism, machine, cyborg) solving a problem by completing a task (through natural or technical behaviors). After reading the story (validated through open-response comprehension check), participants evaluated the agent and about the solution, finally reporting demographics. All materials are available as online supplements:
The protocol was acknowledged as exempt by the Institutional Review Board of West Virginia University, where the data collection was conducted.
Recruitment
Participants (n = 176) were consenting U.S. adults recruited through Mechanical Turk for a study on “ways to solve emerging problems.” They were on average 41.63 years of age (standard deviation [SD] = 12.82), predominantly Caucasian (78.4 percent), approximately balanced in sex, and most held bachelor's degrees (56.6 percent).
Procedure
Participants first completed attitudinal and demographic control measures. They were then presented with the randomly assigned, condition-specific stimulus, ensuring adequate reading time with a page timer. They then completed manipulation checks, and measures evaluating the agent and its solution.
Stimuli
Stimulus stories comprised of short, magazine-style articles adapted from an actual magazine article about “robotic pollinators” (machine agents who automatically pollinate plants). 31 The original content was manipulated to (a) represent each agent/solution combination (three agent types crossed with two behaviors); (b) remove confounding language; and (c) reinforce agent/behavior cues through the corresponding images. The agents were a natural bee, a cyborg bee, and a robotic bee; the behaviors were natural (novel pollination technique) and technical (information gathering toward farmer adaptivity). Stories detailed how bees help solve the problem of declining crops in the face of population increases according to each agent's abilities.
Measures
Controls
Value orientations likely to be associated with adoption of the heuristics' underlying assumptions about nature, humans, and the utility of machines 32 were captured through four items each for biospheric (valuing nature/environment; mean [M] = 5.467, SD = 1.440, α = 0.939), egoistic (valuing personal power/wealth; M = 4.075, SD = 1.376, α = 0.839), and altruistic (valuing justice/equality; M = 5.686, SD = 1.175, α = 0.760). Perceived agent and solution ethicalness (each single Likert-style item), in-principle belief in MH (machines are objective, ordered, efficient, accurate, unemotional, logical, reliable; M = 5.869, SD = 1.039, α = 0.852) and with NH (natural things are normal, pure, common, familiar, perfect, genuine, universal; M = 5.998, SD = 0.819, α = 0.769), were also captured. To address a potential confound given the “innovation” framing in the stimulus, we also measured agreement with the heuristic of science as an authority (scientists are legitimate, superior, systematic, accurate, important, expert, influential; M = 5.675, SD = 0.964, α = 0.871). Demographic information was also captured. All measures were presented as seven-point scales.
Manipulation check and dependent variables
To check for sufficient differences in perceptions of agents and behaviors, single semantic-differential items separately rated agent and solution naturalness/technicalness. For dependent variables, agent competence (i.e., how capable/effective the agent was with respect to the context) was assessed using the six-item competence subscale of the Robotic Social Attributes Scale (RoSAS 33 ; M = 5.521, SD = 1.123, α = 0.889). The agent's solution behavior was assessed for effectiveness (six items reflecting general effectiveness and seven reflecting elegance) through an adaptation of the Creative Solution Diagnosis Scale. 34 Those three dimensions were highly correlated (r range 0.841–0.895), indicating large shared variance, so were aggregated into an omnibus effectiveness measure: M = 4.962, SD = 1.371, α = 0.964.
Results
Manipulation checks
To test agent-type manipulation, agents' technical/natural ratings were compared across conditions through separate analysis of variances and pairwise comparisons using Tukey's honestly significant difference (Table 1). The organism was rated significantly more natural than the cyborg, which was rated significantly more natural than the robot, signaling successful manipulation. For behavior-type manipulation, solutions' technological/natural ratings were similarly compared. There was no significant difference in perceived naturalness of the natural and technical behaviors, signaling unsuccessful manipulation. Based on the strong positive relationship between perceptions of agent naturalness and solution naturalness [r(174) = 0.73, p < 0.001, r2 = 0.53], we infer that either (a) cues signaling behavior types were not strong enough to differentiate them, or (b) agent type exerted influence on behavior interpretations. To account for the latter while still addressing posed questions, we first analyze effects as manipulated (retaining all conditions) and then offer revised analysis according to participants' perceived technical/naturalness of the behaviors.
Manipulation Check Results for Agent Type and Behavior Type
Means with differing subscripts in a column are significantly different at p < 0.001.
M, mean; SD, standard deviation.
Primary analysis: agent/behavior evaluations by experimental condition
We queried whether agents' cued ontological category (RQ1) and behavior type (RQ2) influence engagement of nature and/or MHs. To determine effects of agent type (robot, organism, cyborg) and behavior type (natural, technical) on agent and solution ratings, a 2 × 3 multivariate analysis of covariance was performed (with all aforementioned covariates). The model showed a significant main effect of agent type [Wilk's Λ = 0.917, F(4, 322) = 3.585, p = 0.007, ηp 2 = 0.043], but (unsurprisingly, given the failed manipulation) no main effect of behavior type and no agent/behavior interaction effect on agent and outcome evaluations (Figs. 1 and 2; details in supplements). Univariate tests demonstrated that agent type had a significant effect on agent-competence ratings [F(2, 162) = 5.036, p = 0.008, ηp 2 = 0.059]and solution-effectiveness ratings [F(2, 162) = 6.121, p = 0.003, ηp 2 = 0.070; Table 2]. Bonferroni-adjusted pairwise comparisons indicate that the organism was rated more competent than the robot, with the cyborg undifferentiated from either. Solutions were rated more favorably when attributed to the organism versus the robot or cyborg, with no difference in solution ratings between the robot and cyborg.
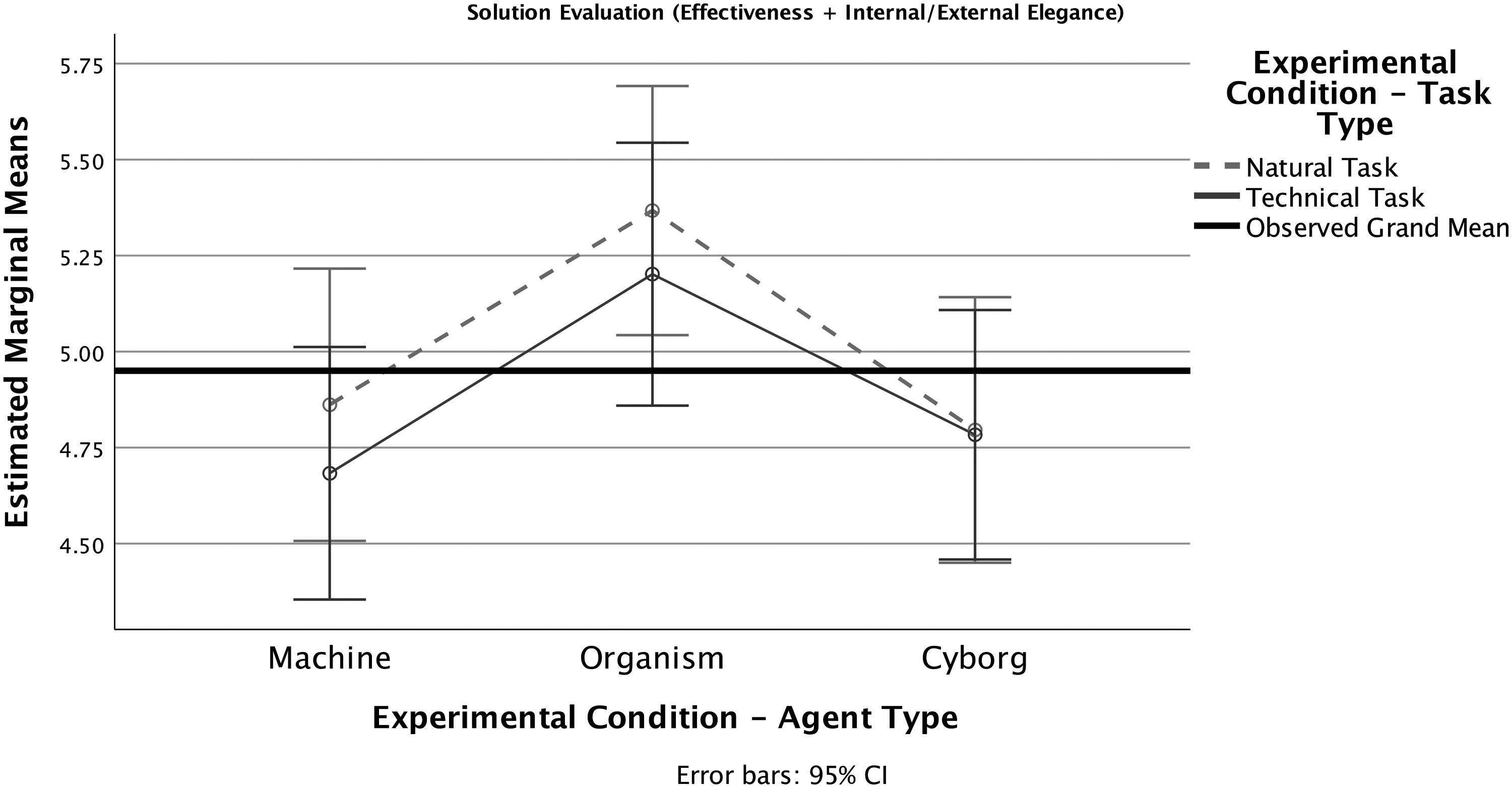
Effects of agent and behavior type on evaluation of agent's solution.
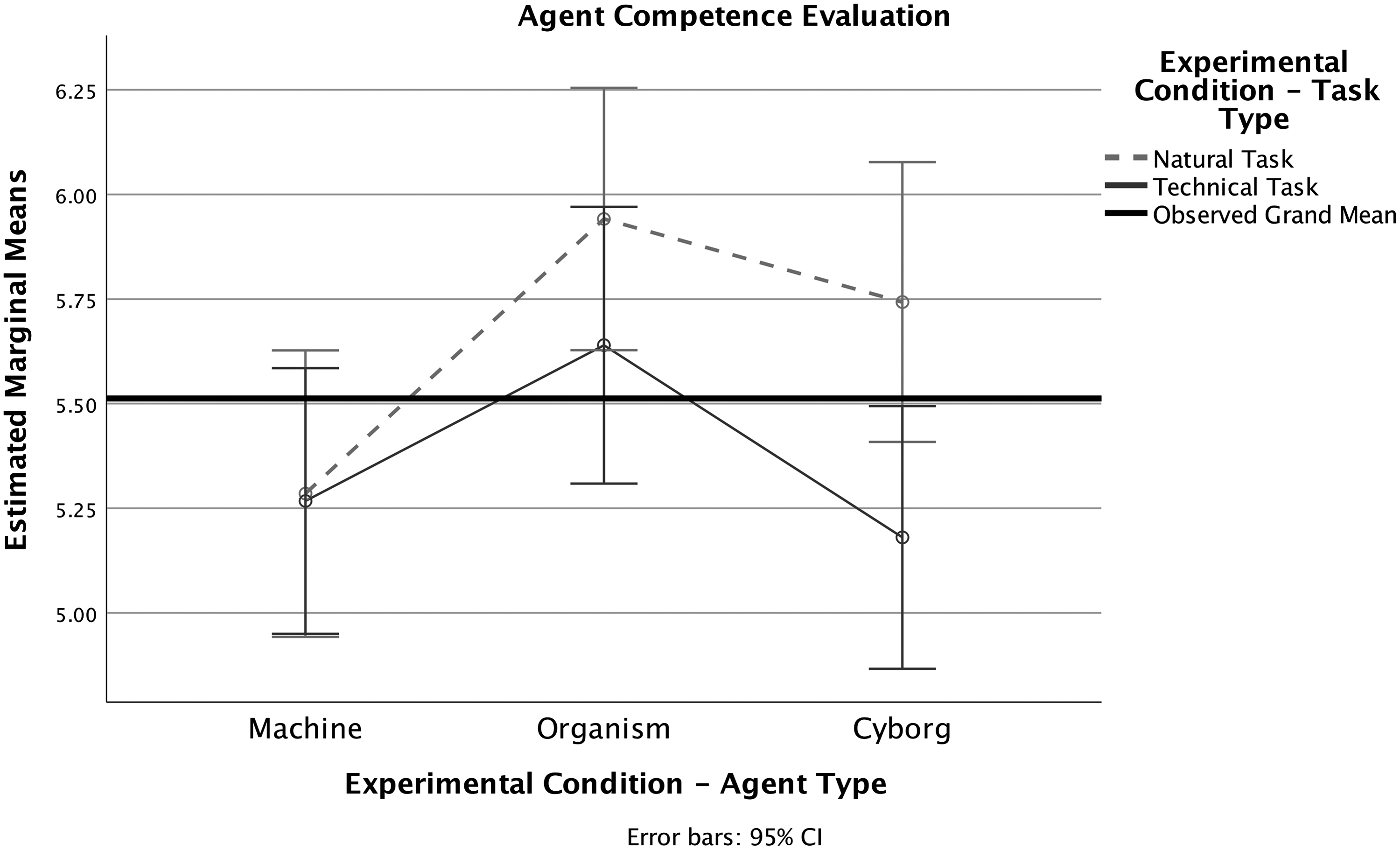
Effects of agent and behavior type on evaluation of agent's competence.
Means and Standard Deviations for Dependent Variables by Experimental Condition
Means with differing subscripts in a column are significantly different (p < 0.05, Bonferroni adjusted for multiple comparisons).
Summarily, the organism was rated more favorably than the robot, and the solution was evaluated more favorably when attributed to the organism versus the robot or cyborg (with no influence of the behavior type itself). This nature-favoring pattern in evaluating agents and their solutions suggests NH activation over MH.
Post hoc analysis: agent/behavior evaluations by perceived naturalness
The unsuccessful behavior-type manipulation and strong association between perceived naturalness of agent and behavior prompted examination of whether agent type might be priming perceived behavior naturalness, which would then predict solution evaluations.
Because manipulated behavior types were indistinct in perceived naturalness, we collapsed cases from behavior conditions and instead leveraged perceived naturalness of the behavior. We used the PROCESS 3.0 macro for SPSS (Model 4), 35 with agent type dummy coded to enable pairwise comparisons when treated in regression analyses as independent variables (X1, X2, X3). Behavior-naturalness ratings served as the mediator variable (M) on dependent-variable solution evaluations (Y; Table 3).
Model Coefficients for Mediation Analyses
Constants i3 and i4 apply to the contrast between organic and cyborg bee (X3) following additional dummy coding to generate the final pairwise comparison with a multicategorical predictor in PROCESS 3.0.
SE, standard error.
Unstandardized regression coefficients between agent type and behavior-naturalness ratings were statistically significant for all three contrasts, indicating (aligning with agent naturalness ratings) that organism behavior was perceived as most natural, followed by cyborg, then robot. Behavior-naturalness rating was a significant, positive predictor of solution evaluation: the more natural the solution was perceived, the more favorably it was evaluated (Table 4).
Direct and Indirect Effects of Agent Type on Solution Evaluation
Unstandardized effects were computed for each of 5,000 bootstrapped samples, and the 95% CI was computed by determining the effects for the 2.5th and 97.5th percentiles.
Indicates statistical significance at the 95% CI.
CI, confidence interval.
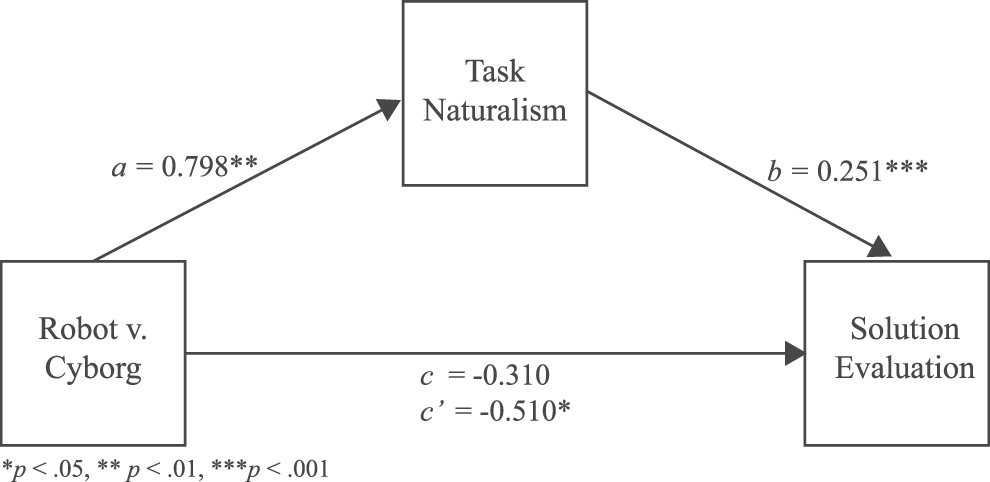
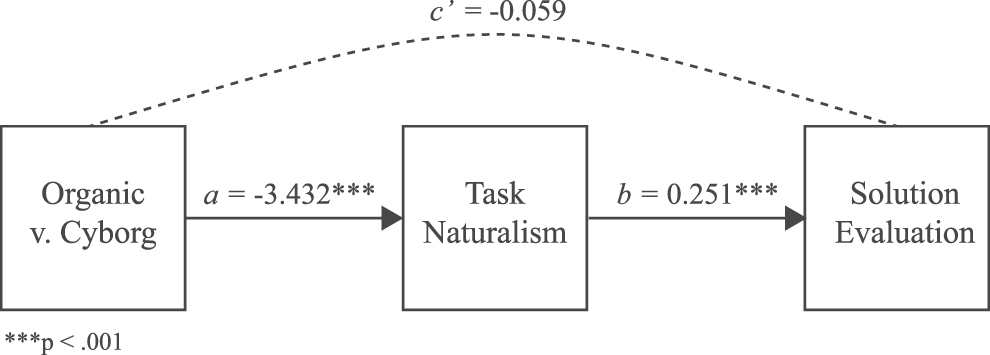
When comparing organism with robot (Fig. 3) and cyborg (Fig. 4), there were no direct effects of agent type on solution evaluations, but there were significant indirect effects in which the organism was seen as enacting more natural behaviors than the robot and cyborg, which led to more favorable evaluations of the organism's solution (X→M→Y). For robot versus cyborg (Fig. 5), there was a significant direct effect of agent type on solution evaluation; the robot's solution was evaluated more positively than the cyborg's solution. There was also a significant indirect effect in which the cyborg was perceived to enact more natural behaviors than the robot, leading to higher evaluations of its solution. The cyborg was seen as enacting a more natural solution than the robot, which led to higher evaluations of the solution (X→M→Y), but the robot was seen as executing a more effective solution than the cyborg when the mediator variable of behavior naturalism remained unaltered (X→Y). This pattern of results, considered alongside the small and insignificant total effect (direct and indirect results canceled one another out), suggests inconsistent mediation in which behavior naturalism is acting as a suppressor variable on the effect of agent type on evaluations of solution.
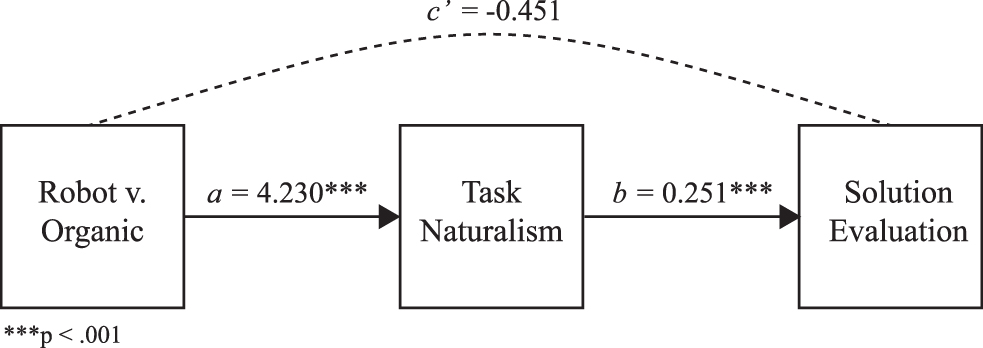
Indirect effect of agent type (robot vs. organism) on evaluation of solution.
Indirect effect of agent type (organic vs. cyborg) on evaluation of solution.
Direct and indirect effects of agent type (robot vs. cyborg) on evaluation of solution (inconsistent mediation).
Discussion
In considering whether agents' cued ontological category and/or behaviors differentially invoke machine and NHs, primary analysis indicates that organisms are considered more competent than other agents and outcomes are rated more favorably when attributed to organisms versus other agent types, irrespective of predicating behaviors or results. Post hoc analysis indicates that agents' ontological class promotes differentially perceived technical/naturalness of behavior: more perceptibly natural behaviors result in more perceptively effective solutions. However, a robot's solution was interpreted as better than a cyborg's, independent of behavior naturalism. These findings suggest that agent-category cues influence agent-behavior perceptions, which then influence behavior-outcome evaluations. Simply, people relied on agent type to understand its behavior and then relied on those understandings to evaluate the behavioral outcomes. Overall, NH may be a dominant heuristic in agent-behavior evaluations, leading to biased outcome evaluations, but cyborgs may cue a novel or mixed heuristic triggered by category-boundary fuzziness.
Primacy of agent-type cues and the NH
Findings suggest that cued ontological category grounds people's interpretation of agents' behavior, since there were consistent indirect effects: agent-type cues influenced perceptions of behavior naturalness, which in turn governed agent and behavior evaluations. In tandem, evidence points to the potential that NH is a more powerful heuristic than MH, 36 since organisms' natural cues overrode influences of a MH and of agents' technical behaviors. However, we offer these interpretations cautiously because this study drew on a particular problem and context that makes sense for how people understand the function of the stimulus agents (i.e., bees). It is possible that narrated or lexical context itself served as a prime, 37 promoting attention to naturalness as a marker for valid participation in the activity—indeed it is theorized that context and expectations may influence MH activation. 10 Specifically, plant propagation is innately natural, and may itself have triggered NH and influencing subsequent evaluations. If the same bee agents were put in a technical context (e.g., chemical-goods factory), agent type may still drive behavior interpretation; however, MH may instead be dominant.
Cyborgs' fuzzy-set heuristic
Cyborgs evoked moderate or nondifferent scores compared with organisms and/or robots, often with high standard deviations, suggesting (copacetic with our initial speculation) that cyborgs differently cue ontological category through two possible mechanisms. First, cyborgs may provoke middling responses (e.g., having less autonomy than organisms but more than robots 2 ), provoking equivocal responses to natural/technological in-betweenness. Alternately, cyborgs may provoke hybrid responses that draw from both other categories' assumptions (e.g., efficiencies of robots but mortality of organisms). Cyborgs were here perceived as providing worse solutions than organisms and as less competent than organisms or robots toward “worst of both worlds” evaluations. In either case, cyborgs may evoke fuzzy-set heuristics—mental shortcuts relying on unclear category-membership boundaries (cf. 38 ).
Limitations and future directions
This study features limitations to be addressed in future research. In addition to the narrow pollination-problem context, the stimulus focused on an insect. Although this was purposeful because humanoids carry a good bit of theoretical and operational “baggage” (e.g., social norms, social-group cues, expectations for advanced cognition 39 ), future research should explore whether or how MH/NH dynamics may similarly apply to anthropomorphic agents. We also leveraged a single bipolar rating of perceived technical/naturalness, but evaluations of technicalness and naturalness may be independent (i.e., cyborgs could have been seen as both highly natural and highly technical). 40 Future scholarship may adopt multidimensional ratings to further explore fuzzy-heuristic evaluations. Finally, we have taken liberty with modeling causal order; although theoretically sound (i.e., visual cues from agents are processed more quickly than textual information about behavior, and both came before the agent/solution evaluations), future studies should more concretely control and test for temporal order of cueing, heuristic activation, and bias outcomes. 41
Conclusion
This study suggests that agent-category cues ground agent-behavior interpretations, which then influence outcome evaluations; however, fuzzy category membership may disrupt this process. These results highlight that current conceptualizations of ontological-category-cued heuristics (as mental shortcuts driving un/favorable outcome evaluations) overlook behavior interpretation as an important mediating factor in agent-cued heuristics resulting in biased evaluations.
Notes
a. The fallacy comes in two forms: (1) the inferencing of what ought to be from what is and (2) the distortion of human's relationship with nature as inherently natural. 42
b. A naturalistic fallacy is understood among logicians as the inferencing of an imperative (what ought to be) from a deduction of fact (what is). 5
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Funding Information
No funding was received.