
Abstract
The human physical resemblance of humanoid social robots (HRSs) has proven to be particularly effective in interactions with humans in different contexts. In particular, two main factors affect the quality of human–robot interaction, the physical appearance and the behaviors performed by the robot. In this study, we examined the psychological effect of two HRSs, NAO and Pepper. Although some studies have shown that these two robots are very similar in terms of the human likeness, other evidence has shown some differences in their design affecting different psychological elements of the human partner. The present study aims to analyze the variability of the attributions of mental states (AMS), expectations of robotic development and negative attitudes as a function of the physical appearance of two HRSs after observing a real interaction with a human (an experimenter). For this purpose, two groups of young adults were recruited, one for the NAO (N = 100, M = 20.22) and the other for the Pepper (N = 74, M = 21.76). The results showed that both the observation of interaction and the type of robot affect the AMS, with a greater AMS to Pepper robot compared to NAO. People's expectations, instead, are influenced by the interaction and are independent of the type of robot. Finally, negative attitudes are independent of both the interaction and the type of robot. The study showed that also subtle differences in the physical appearance of HSRs have significant effects on how humans perceived robots.
Introduction
In the last 20 years, different types of humanoid social robots (HSRs) were built to help and support people in different contexts from domestic to health care to educational.1–4 In these contexts, the physical human likeness of the HSRs has proven to be particularly effective in the interactions with humans.2,5–7 A recent review of the literature by Marchetti et al. 1 on humanoid robots showed that the quality of human–robot interactions (HRIs) improves as a function of at least two factors: the physical appearance of the robot (i.e., the design) and the behaviors performed by the robot (i.e., the interactional routines).
In the present study, the two humanoid social robots (HRSs) that are used, NAO and Pepper, differ in terms of their physical appearance—although as shown below this difference is subtle—, while the behaviors performed by the HRSs are the same. Therefore, we intend here to analyze the variability of attributions of mental states (AMS), robotic development expectations, and negative attitudes as a function of the physical appearance of NAO and Pepper after observing a real interaction with a human (an experimenter).
The design of the HRSs: NAO and Pepper
The study of the physical design of HRSs is an important research topic in the field of HRI studies, although it has not yet been systematically analyzed from a psychological point of view. Several studies have shown that specific facial features (i.e., nose, eyes, and mouth) resembling human ones are particularly important for the perception of the robots' human-likeness.8–11 However, excessive resemblance to the human triggers the Uncanny Valley Effect: the more the appearance of robots is similar to humans, the more is the sense of eeriness.12–14 The human sensitivity to the physical appearance of robots was also found in childhood,15–18 in particular, children already at 5 years of age attribute greater mental qualities to a more anthropomorphic robot, that is, the NAO, compared to a more mechanical robot, that is, the Robovie. 10
A recent study classified around 200 HSRs based on their level of human likeness. 19 In this collection, the NAO robot was rated on the human-like factor with a score of 46/100, while the Pepper robot with a score of 42/100. Although these two HSRs are very similar with respect to their level of human likeness, they nevertheless display physical differences both substantial (e.g., NAO is shorter than the Pepper and NAO has legs, while the Pepper has a platform with wheels) and more nuanced (e.g., Pepper has bigger eyes and has five fingers, while NAO has less defined eyes and only three fingers).
Furthermore, Pandey and Gelin 20 stressed that the voice implemented in the two robots is different to overcome some stereotypes and unrealistic expectations toward them. The authors reported that, for the NAO, people generally use the pronoun him, while for the Pepper they use him, her, or it almost equally. This denotes greater gender neutrality for the robot Pepper.
In support of the hypothesis of the presence of differences between these two robots, despite the fact that they are very similar HSRs, a recent study by Thunberg et al. 21 showed that people after experiencing a situation where the NAO robot and Pepper robot opposing to an experimenter's request, participants judged the NAO as more likable, intelligent, safe, and lifelike than Pepper. The authors suggested that these differences could result from a more pronounced social presence of Pepper—due to its physical appearance—compared to the NAO and, consequently, participants attributed lower positive social qualities to the Pepper robot.
In this sense, although some studies show that these two robots are very similar HRSs, other evidence indicates that their physical appearance may exert different effects on human's perception of their psychological attributes.
The effect of interactions
In psychology, it is widely recognized that from early childhood, representations of relationships change over time because they are conditioned by experiences with others.22–26 As a matter of fact, people tend to change their opinions and attitudes about others as a result of their reciprocal experiences.
As for human interactions, although with a different relational meaningfulness, experiencing an interaction with a robot could change the representation that a person has of it. Several studies analyzed this variation in terms of social presence, pleasantness, and, more generally, attribution of psychological qualities, showing that even the mere observation of the interaction between a human and a robot increases the perception of human characteristics of the robot and vice-versa decreases the negative psychological contents in humans. 27 In particular, the higher level of human likeness of the robot positively influences the attribution of human-like qualities to the robot.10,28 Therefore, the positive effect of interaction also depends on the type of robot used.
In a recent study with the NAO robot, it was found that negative attitudes toward the robot, specifically anxiety, decreased significantly after experiencing a single interaction, particularly in elderly compared to a group of high-school students. 29 In addition, another study with the Pepper robot found that adults increase their perception of the robot's social presence after one interaction. 30 Also, a study by Thunberg et al. 21 comparing NAO and Pepper showed that the negative attitudes toward these two robots do not differ after an interaction. However, the findings revealed that participants reported greater positive feelings toward NAO than Pepper. In general, we can state that interacting or observing an interaction improves the perception of human likeness of the robot and that depending on the type of robot the psychological effects are different.
Although several studies have shown that experiencing interactions with robots affects how humans perceive them in terms of psychological attributes,27,29,30 no study has yet examined how people's expectations of robots in terms of technical and human properties change as a function of the interaction. In this sense, a recent study showed that people's expectations for the future development of robots can be classified according to five specific profiles that are placed on different levels of a robot humanization continuum. However, this study did not analyze the expectations after observing an interaction.
Aims of the study
The present study aimed to investigate the AMS, people's expectations, and negative attitudes in young adults toward two HRSs, NAO and Pepper, varying in their physical appearance.8,9,19 Differences in the attribution of mental qualities, people's expectations and negative attitudes toward the two robots were then explored as function of the type of robot and the observation of an interaction between a human and the robots.
Methods
Participants
Data were acquired on 174 Italian university students from humanistic degree courses. The participants were divided by the two interaction conditions with the Pepper robot (N = 100, M = 20.22, SD = 1.80, F = 90) and the NAO robot (N = 74, M = 21.76, SD = 4.42, F = 41). Each subject gave their written consent to participate in the study.
Description of robots
NAO robot
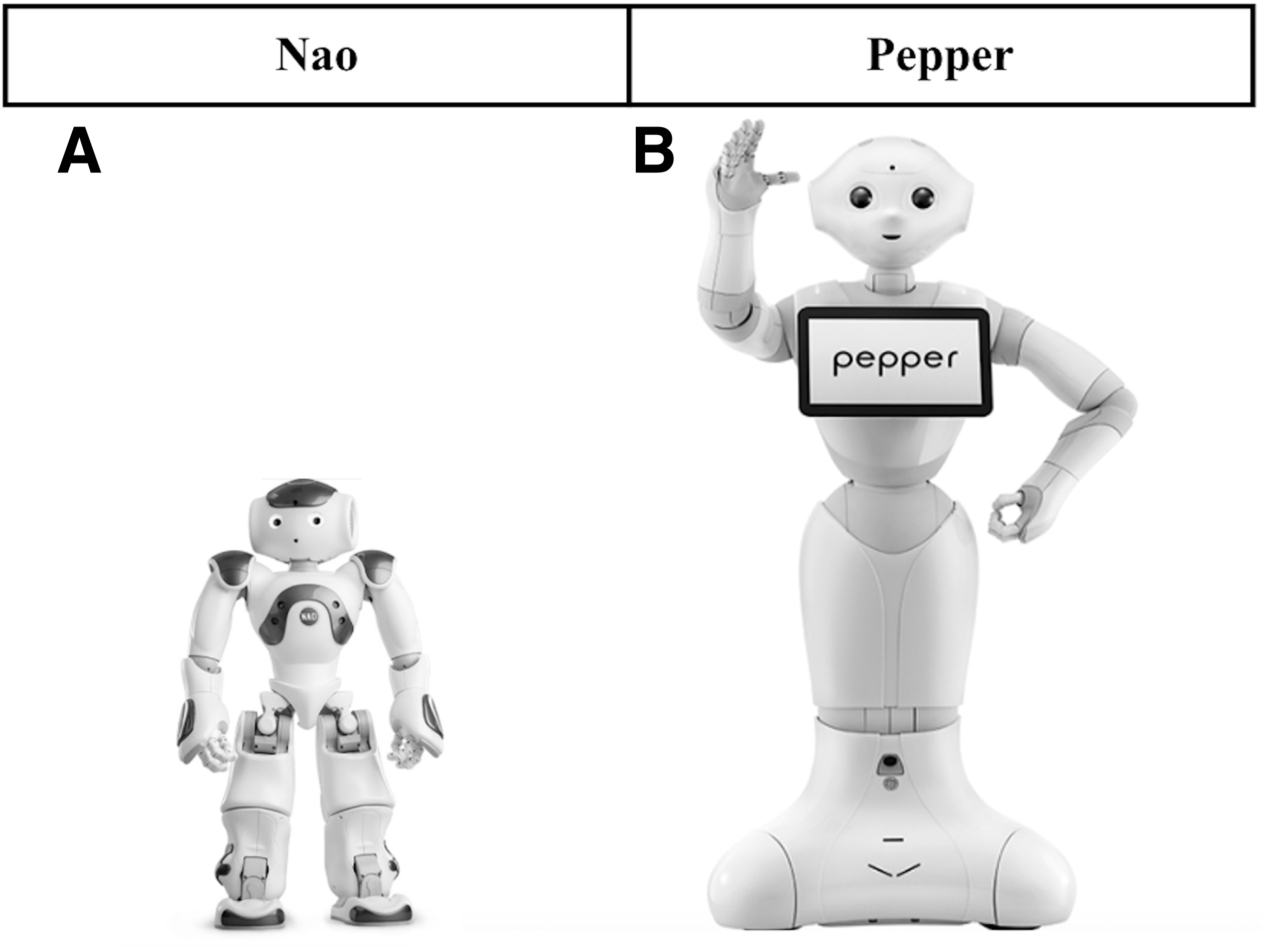
The V6 edition of the NAO (SoftBank Robotics®) robot (Fig. 1A) was used. NAO is a bipedal robot with pleasantly rounded features, about 58 cm high. It has 25 degrees of freedom to move and adapt to the environment. NAO is a humanoid robot with pronounced anthropomorphic characteristics: two legs, two arms, and two hands with three moving fingers. Moreover, the face is composed of two eyes and a camera placed in the lower part of the face that resembles a mouth. Overall, it looks like a child. In addition, it performs quite fluid actions, similar to the movements of a child.
(
Pepper robot
The Pepper robot (SoftBank Robotics) was used (Fig. 1B). Pepper is 120 cm high and its design guarantees a high level of user acceptance. It has 20 degrees of freedom for natural and expressive movements. The Pepper compared to the NAO does not have legs, but a platform with wheels that allow it to move in the environment. Despite the lack of legs, Pepper seems highly anthropomorphic, especially due to the two arms and hands with five moving fingers. Moreover, the face has big eyes (the video cameras) that make it look very similar to a person; furthermore, the camera in the lower part of the face seems a mouth. In general, Pepper looks like an adult robot.
Measures
Attribution of mental states
The AMS 10 is a measure of the attribution of mental qualities that participants ascribe when they look at images depicting specific characters (humans or robots).15,16 In the present study, according to the group condition, participants AMS to the NAO or the Pepper robot. This scale is a self-administer instrument composed by 25 items evaluated on a 10-point Likert scale (1 = not at all; 10 = absolutely yes).
The scale consists of five mental states dimensions: the first dimension measures “Perceptive” states (five items; e.g., “Do you think it can smell?”); the second dimension concerns the “Emotive” states (five items; e.g., “Do you think it can be happy?”); the third dimension measures “Intentions and Desires” states (five items; e.g., “Do you think it can make a wish?”); the fourth dimension concerns “Imaginative” states (five items; e.g., “Do you think it can make a joke?”); and the fifth dimension measures “Epistemic” states (five items; e.g., “Do you think it can teach?”). All the dimensions resulted to be reliable (respectively: preinteraction α = 0.78, 0.95, 0.85, 0.82, 0.83; postinteraction α = 0.83, 0.97, 0.91, 0.87, 0.74).
Scale for robotic needs
The “Scale for Robotic Needs” (SRN) (Manzi F, Sorgente A, Massaro D, et al. Emerging adults' expectations about the next generation of robots: exploring robotic needs through a latent profile analysis. Unpublished work 2020) evaluates participants' expectations about the development of the robots, in particular, those characteristics/skills that the robot should acquire to be more both technical and relational efficient. This scale is a self-administer instrument composed by 17 items evaluated on a 5-point Likert scale (1 = not at all; 5 = very much).
The SRN's factorial structure consists of four factors: three items measure expectation about robots' “Technical Features” [e.g., “Have more power (e.g., battery life)”; preinteraction α = 0.64, postinteraction α = 0.78], three items measure expectation about their “Social-Emotional Resonance” (e.g., “Increase its ability to transmit and communicate emotions”; preinteraction α = 0.85, postinteraction α = 0.76), three items measure expectation about their “Agency” (e.g., “Have the ability to perform tasks with other people or robots”; preinteraction α = 0.71, postinteraction α = 0.75), and the remaining eight items measure expectation about robots' “Human Life” (e.g., “Have a pet”; preinteraction α = 0.89, postinteraction α = 0.87).
Negative attitudes toward robots scale
The NARS 31 measures humans' attitudes toward robots in daily life. The scale consists of 14 items divided into three subscales: the first subscale measures “Negative attitudes toward situations and interactions with robots” (six items; e.g., “I would feel uneasy if I was given a job where I had to use robots”); the second subscale concerns the “Negative attitudes toward social influence of robots” (five items; e.g., “I would feel uneasy if robots really had emotions”); and the last subscale measures “Negative attitudes toward emotion in interaction with robots” (three items to reverse; e.g., “I feel comforted being with robots that have emotions”). Each item is evaluated on a 5-point Likert scale (1 = strongly disagree; 7 = strongly agree). All the subscales resulted to be reliable (respectively: preinteraction α = 0.73, 0.65, 0.68; postinteraction α = 0.76, 0.77, 0.64).
Procedure
The experiment consisted of three phases. In the first phase, the “Scale for Robotic Needs,” the “Attribution of Mental States,” and “Negative Attitudes towards Robots” were administered randomly. During the interaction phase, the experimenter interacted with NAO or Pepper to show the robot's speech recognition, response, and movement capabilities. Also, the human and the robot played a game named “guess what it is”: the robot explained the rules of the game, showing the experimenter a series of cards representing animals or fruits. The experimenter chose one of these cards and the robot, asking a series of questions, guessed which animal or fruits are represented on the card. The short game was designed to introduce the subjects also some “autonomous” mental abilities of the robot simulating a cognitive and relational functioning. During the last phase of the experiment, the same tests of the pretest phase were administered randomly.
Results
To estimate the effect of observing an interaction between humans and robots on the AMS to the robots, on expectations of development of the future robots and on negative attitudes toward the robots, three generalized linear model (GLM) analyses were carried out. The Greenhouse–Geisser correction was used for violations of Mauchly's Test of Sphericity (p < 0.05). Post hoc comparisons were Bonferroni corrected.
The effect of the interaction on the AMS
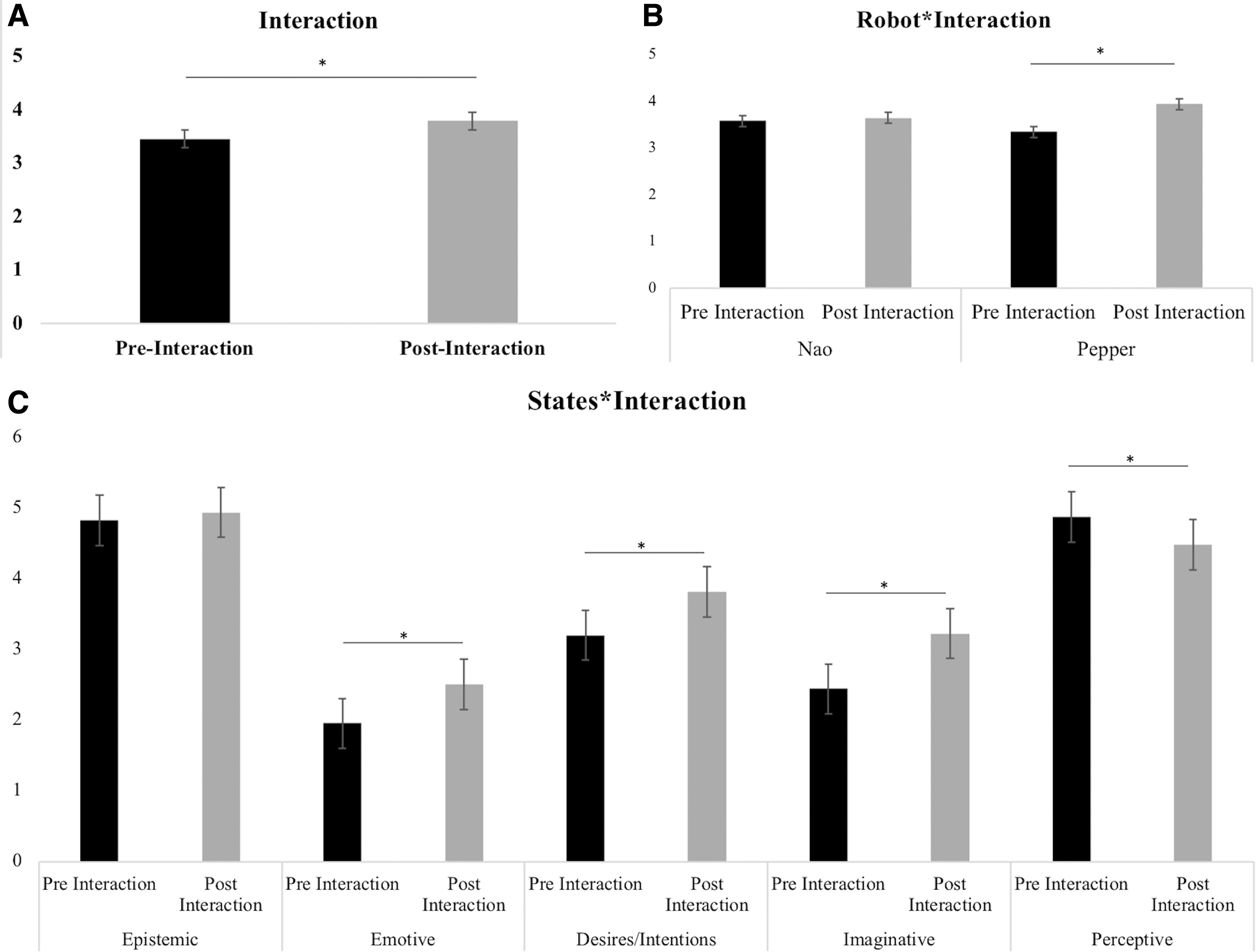
To evaluate the effect of the type of robot on the AMS to the robots a GLM analyses was carried out with two levels of Interaction (preinteraction, postinteraction) and five levels of States (epistemic, emotive, intention/desires, imaginative, perceptive) as within-subject factors and Robot (NAO, Pepper) as between-subject factor. The GLM revealed (1) a significant main effect of Interaction (F = 12.56, p = 0.001), suggesting that the interaction affect positively the AMS (postinteraction > preinteraction, MDiff = 0.332, SE = 0.094, p < 0.001; Fig. 2A); (2) a significant main effect of States (F = 164.98, p < 0.001), suggesting that participants ascribed less emotional states compared to the other dimensions (Table 1).
Statistics Comparing the Attribution of Epistemic and Emotive States of the AMS and the other Dimensions of the AMS
AMS, attribution of mental states.
Furthermore, the analysis showed a two-way interaction between (1) Robot and Interaction (F = 26.28, p = 0.006; Fig. 2B), suggesting that Pepper has a greater effect compared to NAO, and (2) Condition and States (F = 17.21, p < 0.001; Fig. 2C), showing that all dimensions, except epistemic states, change after interaction. In addition, the results indicated a significant three-way interaction between Robot × Interaction × States, F(1, 154) = 2.56, p = 0.037, partial-η 2 = 0.016, δ = 0.72. The post hoc analyses showed that participants ascribed more mental states for all five dimensions of the AMS after the interaction with Pepper, conversely after the interaction with NAO increased the attribution of the Intention/Desires, Imaginative and Perceptive dimensions, but not of Epistemic and Emotive states (Table 2).
Statistics Comparing the Attribution of AMS Dimensions as a Function of the Robot (NAO, Pepper) and Interactions (Pre-Interaction, Post-Interaction)
The effect of the interaction on the expectations of the future robots
To evaluate the type of robot on people's expectations of future robots, a GLM analyses was carried out with two levels of Interaction (preinteraction, postinteraction) and four levels of Robotic Needs (technical advantages, socioemotional resonance, agency, human life) as within-subject factors and Robot (NAO, Pepper) as between-subject factor. The GLM revealed (1) a significant main effect of Interaction (F = 8.74, p < 0.005), suggesting that participants' expectations are higher after interaction compared to the expectations before interaction (postinteraction > preinteraction; MDiff = −0.116, SE = 0.039, p < 0.005; Fig. 3A); (2) a significant main effect of Robotic Needs (F = 522.26, p < 0.001; Fig. 3B), suggesting that the technical advantages are the higher expectations for the development of the new robots, conversely the human life features are the lower expectations for the development of the next generation of robots.
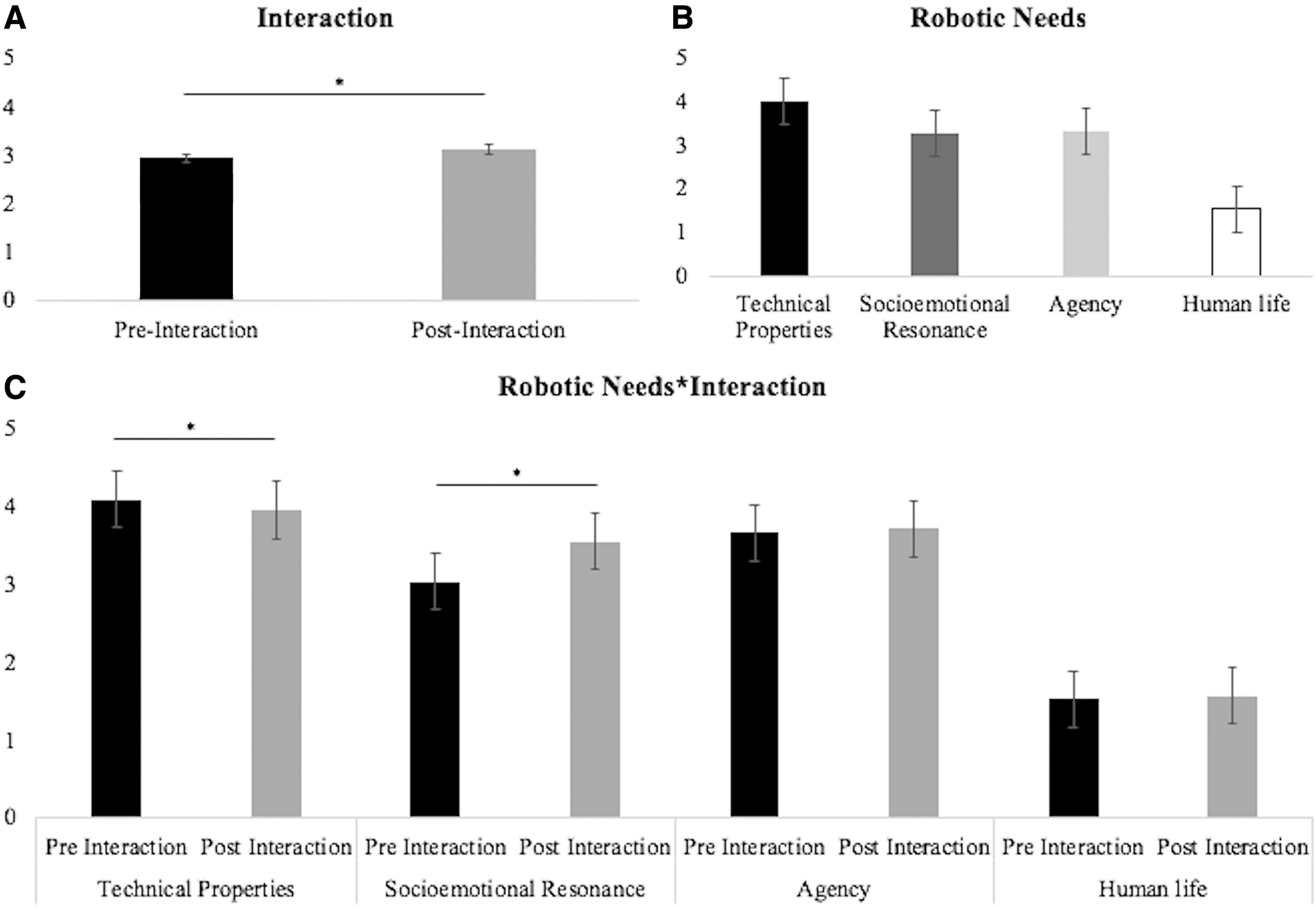
Furthermore, the analysis showed a two-way interaction between Robotic Needs and Interaction F(3, 155) = 25.66, p < 0.001, partial-η 2 = 0.137, δ = 1. The post hoc analyses showed that participants' expectations are higher for the agency and the socioemotional resonance after the interaction, but the technical advantages decreased after interaction (Fig. 3C).
The effect of the interaction on the negative attitudes
To assess the effect of the type of robot people's expectations of future robots a GLM analyses was carried out with two levels of Interaction (preinteraction, postinteraction) and three levels of Negative Attitudes (social interaction, social influence, emotions) as within-subject factors and Robot (NAO, Pepper) as between-subject factor. The GLM revealed a significant main effect of Negative Attitudes, F = 110.85, p < 0.001, partial-η 2 = 0.425, δ = 1, suggesting that the participants are more frightened by the social influence that robots can have on humans compared to both anxiety of social and emotional interactions (Fig. 4). However, there are no significant interactions between Negative Attitudes, Interaction, and Robot (p > 0.05), suggesting that the people's negative attitudes are independent of assisting to an interaction and to the type of robots.
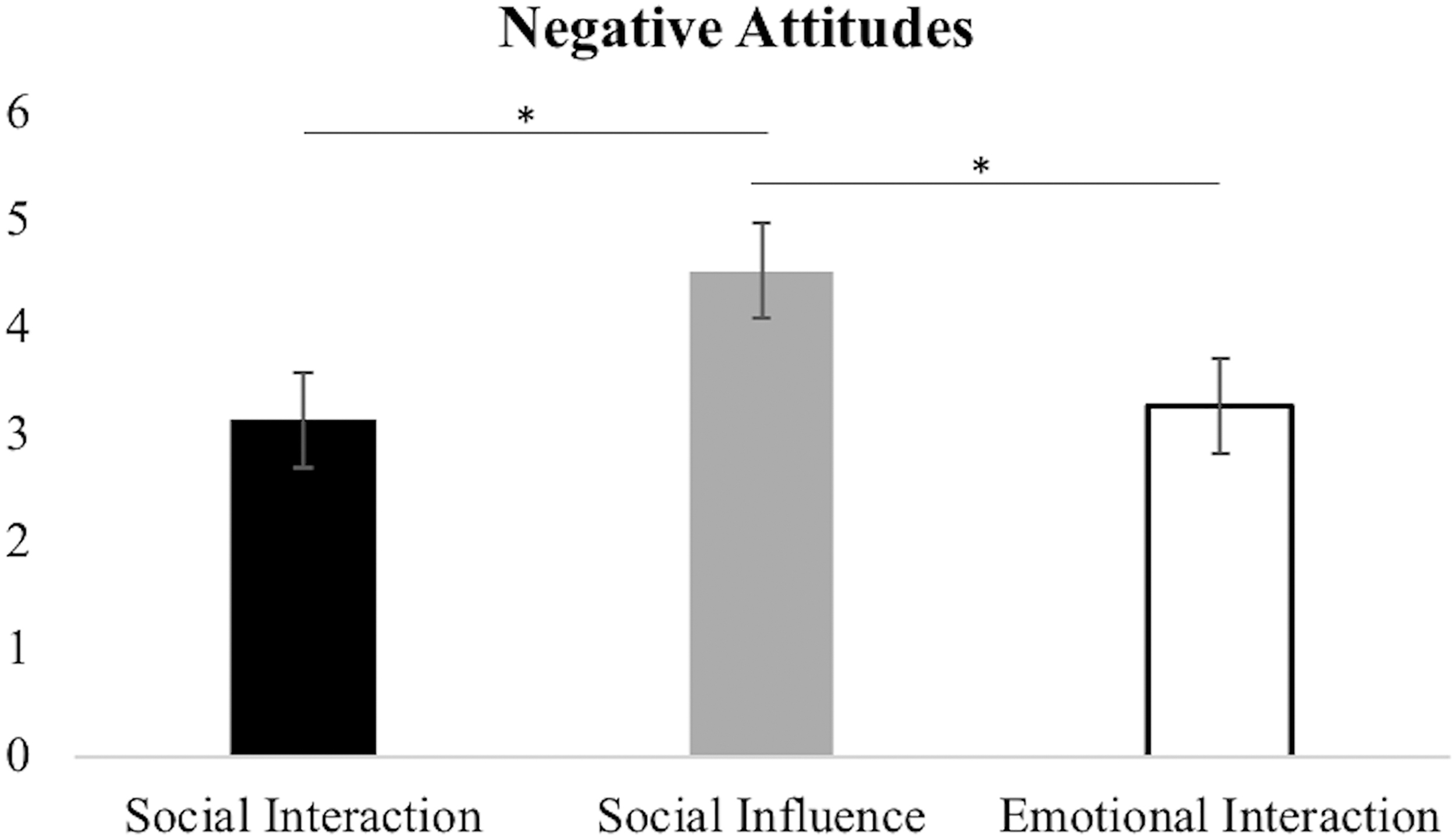
Bar chart representing the NARS mean scores (social interaction, social influence, and emotional interaction). *Indicates significant differences. NARS, Negative Attitude toward Robots Scale.
Discussion
The present study investigated the variability of the AMS, expectations, and negative attitudes toward future robots as function of the physical appearance of two HRSs, NAO, and Pepper, after observing a real interaction with a human (an experimenter).
The results of the AMS showed that there were no differences between the two HRSs before the interaction. These findings are in line with a previous study showing that these two HRSs are similar with respect to their level of human likeness. 19 However, the scenario substantially changed after the interaction, revealing the human's sensitivity to the physical appearance of the HRSs. This sensitivity in terms of AMS was already observed in early childhood, highlighting a developmental trend indicating that children at the age of 5 are less sensitive to the physical differences of robots than older children. 10
The results of the present study prove that this sensitivity to the physical appearance of robots is fully acquired in adulthood. In particular, participants attribute higher mental qualities to all dimensions of the AMS after witnessing the interaction with the Pepper robot, indicating that the design of the Pepper robot evokes higher mental properties than the NAO robot. Although this result seems to be in contrast with the findings of the study by Thunberg et al., 21 which showed a greater increase in positive attributes to the NAO than to the Pepper, it is important to highlight that the two interactions are substantially different.
The interaction implemented for this study was more friendly with respect to the interaction of the study by Thunberg et al., 21 which was characterized by the oppositional behavior of robots toward the human partner. Therefore, future studies should address the effects of these two robots in different scenarios.
The results of the negative attitudes revealed that these are independent of both the interaction and the type of HRSs. These data showed, on the one hand, that the direct experience of a single interaction with robots is not sufficient to trigger a change in negative attitudes toward robots, and, on the other hand, that attitudes are not influenced by the subtle design difference of these two HRSs. Therefore, future studies should further investigate the effect of repeated interactions with a wider range of physical differences of the HRSs, from the more mechanical to the more human.
The trends observed in our study regarding the AMS after witnessing an interaction between a human and a robot are also found in relationship to people's expectations of future robots. However, expectations are independent of the type of robot, highlighting that these are associated with a more general view of robotic technologies.
In particular, expectations regarding mechanical properties decrease after interaction, showing how people who experience the real functioning of social robots are more aware of current technological advances. Moreover, people expect robots to improve their social abilities after interaction. This result may plausibly depend on the people's general misconception that includes both robotics and artificial intelligence (AI) in a unique theoretical framework; in other words, people assuming that a robot necessarily incorporates AI expect to improve social skills after interaction. In this sense, further studies are required to grasp this possible overlap between robots and AI.
With respect to robot humanization expectations, these represent the least considered and desired properties for robots of the future. This result seems to confirm the hypothesis that although people desire robots to become more efficient in terms of interactional abilities, at the same time, they are particularly worried about their extreme humanization. (Manzi F, Sorgente A, Massaro D, et al. Emerging adults' expectations about the next generation of robots: exploring robotic needs through a latent profile analysis. Unpublished work 2020). Overall, the findings regarding people's expectations for the development of future robots are in line with a previous study, (Manzi F, Sorgente A, Massaro D, et al. Emerging adults' expectations about the next generation of robots: exploring robotic needs through a latent profile analysis. Unpublished work 2020) which shows that people generally prefer the development of technical and interactive components rather than a greater humanization of future robots. Furthermore, this study enriches the topic of expectations on future robots, showing how direct experience with robots can change people's expectations. 32
To sum up, this study showed that humans are particularly sensitive to the design of HRSs in terms of attribution of mental qualities even when the HRSs differ slightly in their physical appearance. Furthermore, the results indicated that negative attitudes toward robots are not influenced by either the interaction or the type of HRSs, showing that these attitudes may probably change as function of repeated interactions. Finally, the results revealed that the observation of an interaction influences people's expectations for the development of future robots, in particular increases their awareness of the real technical capabilities of robots and increases their desire for a more interactive robot. In conclusion, although further studies are needed, we can claim that it is important to overcome the universal assumptions about robots and to assume a new perspective that not all robots are equal.
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This research was funded by Università Cattolica del Sacro Cuore (Human-Robot Confluence project).