
Abstract
The investigation of emerging adults' expectations of development of the next generation of robots is a fundamental challenge to narrow the gap between expectations and real technological advances, which can potentially impact the effectiveness of future interactions between humans and robots. Furthermore, the literature highlights the important role played by negative attitudes toward robots in setting people's expectations. To better explore these expectations, we administered the Scale for Robotic Needs and performed a latent profile analysis to describe different expectation profiles about the development of future robots. The profiles identified through this methodology can be placed along a continuum of robots' humanization: from a group that desires mainly the technical features to a group that imagines a humanized robot in the future. Finally, the analysis of emerging adults' knowledge about robots and their negative attitudes toward robots allowed us to understand how these affect their expectations.
Introduction
The significant advances in robotic research suggest a future in which robots will play an increasingly important role in different contexts of human life. In recent years, we have witnessed the introduction of robots in different contexts, such as home and work,1,2 and in sensitive domains of our society, such as in educational contexts or intervention and rehabilitation practices.3–7 The use of robots in these contexts is particularly important for those parts of the population that will encounter the need to use them in their daily routines and especially at work. One of these groups is certainly that of emerging adults (people aged 18–29 years) 8 : among the various challenges of their development, they also have to deal with the world of work where they will increasingly have to integrate robots into their work routines.
To ensure the effectiveness of robots in social contexts, they should become technically efficient and credible social partners capable of sustaining long-term interactions with humans.9–11 However, there is still a long way to go in terms of technology to achieve these goals. Despite these technical limitations, several studies have shown that humans attribute human-like qualities to robots even in their current form12–19 : this means that people have expectations of robots in terms of performance and interaction possibilities. However, a gap between people's expectations and actual technological advancements of robots could result in less effective human–robot interactions in the future.10,20 More specifically, understanding people's expectations about future robots is essential to guide researchers in the development of existing and new robots.
The issue of people's expectations regarding the technical and social skills to be implemented in future robots has not yet been widely studied. Furthermore, there is no theoretical model in the literature on robots that explains the variables that influence people's expectations for development of future robots. Although there is no specific theoretical model for robots, the literature identified an association between attitudes toward robots and expectations toward an ideal robot. 21 This association between attitudes and expectations was also found in psychology in human interactions. 22
In addition, psychological literature reports the effects of other variables on expectations, grouped into two macrocategories: personal and social variables. 22 In particular, knowledge and attitudes belong to the personal domain, while sociodemographic characteristics belong to the social domain. Based on this lack of knowledge in robotics and the importance of other factors influencing people's expectations, the present study intends to explore the influence of sociodemographic characteristics, knowledge about robots, and attitudes toward robots on people's expectations of future robots.
An important point to consider is related to the type of people's work; in fact, the Eurobarometer 23 showed (in the European population) that the concern about robots as a dangerous technology (i.e., a technology that can steal jobs) is high among manual workers, while it is lower for managers. An aspect that emerged from the Eurobarometer 23 shows that people with a higher level of education tend to rate robots (i.e., a technology to help humans) more positively than those with a lower level of education.
In addition, European data show a positive trend in the general interest in technological developments, although the percentage of people who have interacted with a robot is quite low (around 12 percent). 23 European citizens also accept the idea of using a robot in the manufacturing context more than their domestic use. Moreover, people who would gladly use it at home are more inclined to employ it for household purposes and only a small percentage would use it for company. 23
Another factor that can affect the expectations of emerging adults is gender. Indeed, some studies suggested that gender affects how robots are perceived in terms of possible impact on society.24–26 For example, males perceive robots as more useful technology for society than females. 26 However, these studies also demonstrate the absence of differences compared with other aspects such as the need to control robots, for which both genders score high. 26 Therefore, although there are data showing a gender difference, the debate is still open.
Finally, many studies have analyzed people's negative attitudes toward robots and how these can affect interactions between humans and robots and people's propensity to include robots in sensitive contexts such as clinical or educational context.27,28 These studies delineate a complex scenario with respect to the link between attitudes toward robots and desire to interact with them. A recent study by Billing et al. 29 showed a correlation between negative attitudes toward robots and expectations of using them in a clinical context, in particular showing that fewer negative attitudes toward robots positively affect people's expectations. However, since there is no extensive literature yet on this topic, we believe that our study could shed light on a more complex scenario concerning people's expectations and negative attitudes toward robots.
In this sense, the present study aims to identify profiles describing the different emerging adults' expectations about the development of technical and interactive aspects of future robots and to examine the influence of sociodemographic characteristics, knowledge about robots, and negative attitudes toward robots on these expectations.
Materials and Methods
Participants
Participants were 344 Italian emerging adults (57 percent female) aged 18–29 years (M = 24.94; standard deviation [SD] = 3.07). Around half of the sample (54.7 percent) did not have any academic degree (their highest education level was the high school diploma or lower). Emerging adults having a bachelor's/master's degree or a higher level of education, such as a PhD, were instead 45.3 percent of the sample. One-third of the sample (35.9 percent) comprised workers, while others were students (51.4 percent) or unemployed (12.7 percent). Finally, 7.3 percent of the sample was married or cohabiting.
This sample was collected on two different occasions: 41.6 percent of the participants filled in the survey in 2019 (as this data collection was needed to perform a pilot study; see Supplementary Data), while the remaining 58.4 percent filled in the survey in 2020. In both cases, emerging adults signed an informed consent and were treated in accordance with the Declaration of Helsinki.
Instruments
The description of administered instruments is reported in Table 1.
Description of Administered Instruments
Note: aThe expected four-factor structure was tested on the current sample, showing good fit indices [χ 2 (113) = 197.975; p < 0.001; RMSEA (90 percent CI) = 0.061 (0.047–0.075); p = 0.097; CFI = 0.944; SRMR = 0.061]. Information about this instrument development and evidence of its score validity are reported in the Supplementary Data. See Appendix A1 for exact item wording.
CI, confidence interval; RMSEA, root-mean-squared error of approximation; CFI, comparative fit index; SRMR, standardized root mean of the residual.
Data analysis
Latent profile analysis: identifying different profiles of expectations about future robots
To identify the groups (i.e., profiles) that best describe the heterogeneity within the current sample with respect to the different expectations people have about future robots, we performed a latent profile analysis (LPA) using Mplus software, including the four-factor scores of the Scale for Robotic Needs (SRN) (technical features, social–emotional resonance, agency, and human life) as observed indicators. We examined fit indices of measurement models, beginning with one class and adding classes incrementally. As suggested by Sorgente et al., 30 we used different measures of relative model fit to make decisions about the best class solution.
Specifically, we used two information criteria: the Akaike information criterion (AIC 31 ) and Bayesian information criterion (BIC 32 ), together with another descriptive measure of relative model fit: the approximate Bayes factor (BF), which compares two models at a time (k and k + 1 model, where k is the number of classes) and the best model is the most parsimonious k-class model with BF >3. Furthermore, for each LPA solution, we evaluated the Lo–Mendell–Rubin likelihood ratio test (adjusted LMR-LRT 33 ) that compares a (k − 1)-class model with a k-class model; if it is not significant, the k-class model is as good as the (k − 1)-class model, so the (k − 1)-class model is preferred according to the parsimony criterion. Finally, we compared models evaluating their level of entropy, where values closer to 1 indicate better classification of cases. 34
Once the best solution(s) is selected, the precision of this solution in assigning individuals to a class can be evaluated by (a) comparing the class proportion (πk) with the modal class assignment proportion (mcaPk) and (b) estimating the average posterior probability (avePPk); as well as (c) estimating the odds of correct classification (OCCk). 34 The precision of the latent class solution is good when the mcaPk for each class is included in the 95 percent confidence interval of the πk. Furthermore, to suggest well-separated classes, the avePPk should be 0.70 or higher and the OCCk should be above 5.
Chi-square tests and regressions: identifying predictors of the profiles' membership
Once we identified the different profiles describing the diverse expectations that people have about future robots, we verified, through the chi-square test or logistic regression, if sociodemographic variables (age, gender, educational level, and occupational status), knowledge about robots (general knowledge, definition, and applied domains), and negative attitudes toward robots (three factors of the Negative Attitudes Toward Robots Scale [NARS]) could predict the expectation profile to which people belong.
Results
Descriptive statistics
Descriptive statistics referred to the variables investigated in the current study (expectation about future robots, negative attitudes toward robots, and knowledge people have about robots) are reported in Table 2.
Descriptive Statistics for Variables Measuring Expectations About Future Robots, Negative Attitudes Toward Robots, and Knowledge (General, Definition, and Applied Domains) People Have About Robots (N = 344)
Note: SD, standard deviation.
Latent profile analysis
The four-factor scores measuring, respectively, future robots' technical features, social–emotional resonance, agency, and human life were extracted from the confirmatory factor analysis model of the SRN and used as observed indicators of the LPA. As shown in Table 3, the five-class solution was the preferred one. Despite AIC and BIC being poorly informative as they improved when the number of classes increased, BF, the adjusted LMR-LRT, and the level of entropy suggested retaining the five-class solution.
Relative Model Fit Indices for the Seven Latent Profile Models
Note: Information criterion values in bold indicate the best model fit.
AIC, Akaike information criterion; BIC, Bayesian information criterion; BF, Bayes factor; LMR-LRT, Lo–Mendell–Rubin likelihood ratio test; E, entropy.
Consequently, the five-class solution was investigated through the classification diagnostics. As reported in Table 4, this solution largely satisfied the classification–diagnostic criteria, indicating that the five identified profiles were well differentiated from each other.
Classification Diagnostics for the Five-Class Model
Note: πk, class proportion; mcaPk, modal class assignment proportion; avePPk, average posterior probability; OCCk, odds of correct classification.
The five groups obtained (Fig. 1), representing five different types of expectations that people have toward robots of the future, were named as follows: mechanical properties (N = 198), fuzzy (N = 76), human attributes (N = 39), human relationship (N = 18), and self-determination (N = 13). Emerging adults of the first group scored lower on the three factors that concern interaction abilities (social–emotional resonance, agency, and human life) than average people (i.e., zero scores). The second group has been named fuzzy because people of this group scored all the four factors, giving scores that coincide with the mean score of the entire sample (i.e., their scores are included in the range of ±0.5 standard deviation from the sample mean).
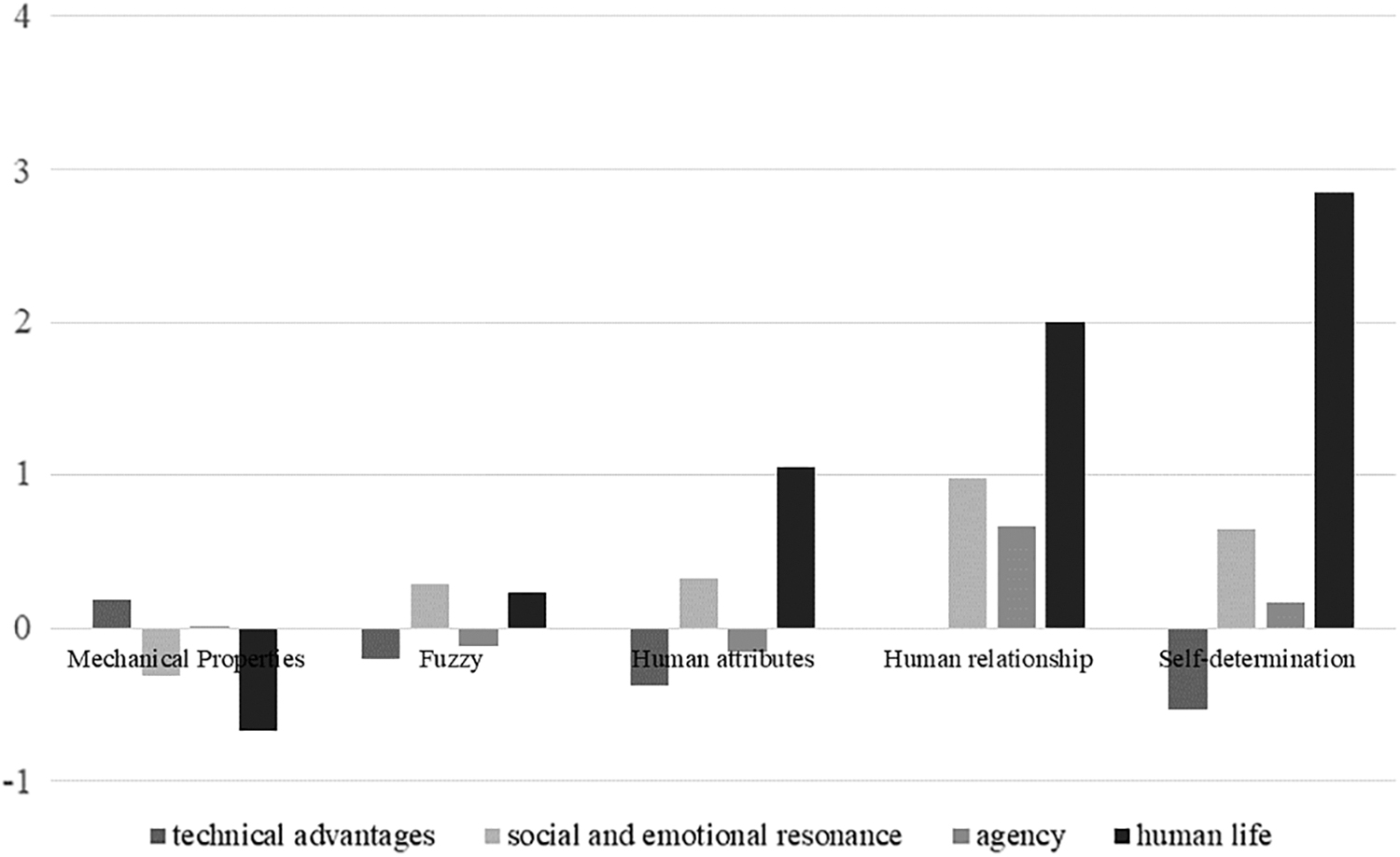
The figure represents the five profiles of emerging adults' expectations toward the next generation of robots obtained through administration of the Scale for Robotic Needs.
The remaining three profiles, instead, represent emerging adults who expect robots to be more similar to humans compared with other groups (i.e., the human life factor score is higher than the sample mean). These three profiles are different from each other for the emphasis given to the human life expectation and for the way in which these expectations are combined with other dimensions. In particular, the third profile (named human attributes) describes people who desire to give human attributes to the future robots, but this expectation is restrained as (a) it is lower than in the two following profiles and (b) it is combined with a medium level of expectations about the empowerment of other abilities (technical features, social–emotional resonance, and agency).
Furthermore, the members of the fourth profile (named human relationship), other than desire empowered human-like abilities for future robots (the human life factor score is higher than the mean), they also expect that future robots will have empowered social–emotional resonance and agency skills. Finally, the mean level of the human life score of the self-determination group is three SDs above the sample mean, suggesting that they responded, 5 ( = very much) to most (if not all) items measuring human life; these emerging adults are the ones who most want future robots to have human skills, such as owning money, having sex, and playing music.
Chi-square tests and regressions
A series of chi-square tests and multinomial logistic regression models were performed to verify if sociodemographic variables, levels of knowledge about robots, and negative attitudes toward robots were able to predict the expectation profile to which individuals belong.
Regarding sociodemographic variables, age [LRT: χ 2 (4) = 4.50; p = 0.343], gender [χ 2 (4) = 6–75; p = 0.150], educational level [χ 2 (4) = 1.844; p = 0.764], and occupational status [χ 2 (8) = 8.51; p = 0.385] did not predict the class membership.
Regarding the level of knowledge about robots, we first verified if the self-reported general knowledge about robots was related to the class membership, finding a nonsignificant relationship [LRT: χ 2 (4) = 0.923; p = 0.921]. Then, we investigated if the definitions of a robot endorsed by the individual affected the profile membership. We found that emerging adults belonging to the profile of mechanical properties defined a robot as a technology that can help humans [χ 2 (4) = 10.48; p = 0.033] more often than expected, while they consider the robot as a technology that can keep humans company less often than expected [χ 2 (4) = 12.41; p = 0.015]. Instead, people defining the robot as a dangerous technology for humans [χ 2 (4) = 1.78; p = 0.776] were equally distributed across the five classes. Finally, we found that the class membership did not depend on the contexts in which people think that robots can be useful: domestic [χ 2 (4) = 2.04; p = 0.729], clinic [χ 2 (4) = 1.48; p = 0.831], and business [χ 2 (4) = 3.52; p = 0.475] domains.
Regarding the negative attitudes toward robots, we performed a multinomial logistic regression in which the three factors of the NARS were included as predictors of the profiles. Results suggested that the whole regression model significantly predicted the profile membership [LRT: χ 2 (12) = 65.53; p < 0.001]. Specifically, the negative attitudes toward situations and interactions with robots [χ 2 (4) = 32.23; p < 0.001] and toward emotions in interactions with robots [χ 2 (4) = 30.67; p < 0.001] significantly predicted the expectations that people have about future robots, while the negative attitudes toward the social influence of robots [χ 2 (4) = 8.92; p = 0.063] were not related to the expectations.
Table 5 summarizes the results of the regression, showing that people having high levels of negative attitudes toward situations and interactions with robots are, respectively, 0.15, 0.30, 0.32, and 0.25 times, less likely to be members of the groups, mechanical properties, fuzzy, human attributes, and human relationship, rather than the self-determination group. Instead, people having high levels of negative attitudes toward emotions in interactions with robots are, respectively, 4.45, 2.93, and 3.17 times, more likely to be members of the groups, mechanical properties, fuzzy, and human attributes, rather than the self-determination group. Instead, members of the self-determination and human relationship groups do not differ in their level of negative attitudes toward emotions in interactions with robots (p = 0.08).
Summary of Multinomial Logistic Regression Analysis for Factors of the Negative Attitude Toward Robots Scale Predicting Membership in Groups of Expectations About Robots of the Future
Note: N = 344; Nagelkerke pseudo R2 = 0.192.
The reference group is self-determination.
df = 1.
OR, odds ratio; NA, negative attitude.
Discussion
The current study aimed to identify specific profiles representing characteristics that should be implemented in future robots to meet emerging adults' expectations. Furthermore, the present study analyzed the effects of sociodemographic characteristics, knowledge about robots, and negative attitudes toward robots on emerging adults' expectations.
We identified five profiles of expectations that can be placed along a continuum of humanization of robots and whose ends are those who consider robots as pure technological tools at the service of humans (i.e., mechanical properties) and those who expect robots to be part of our society in the near future (i.e., self-determination).
The group, mechanical properties, is generally not interested in development of a robot that can “live” as a human and, consequently, expects only a higher mechanical efficiency of robots. This peculiarity emerges when the group, mechanical properties, defines robots as a technology that can help humans. Furthermore, it is important to highlight that the same group describes robots less as a technology that can keep humans company. Therefore, there is consistency between the expectations of members of the group for mechanical properties and their definition of robots: if a person thinks that robots are tools designed to help humans (and not to interact socially), then also her/his expectations are oriented toward mechanical improvements at the expense of characteristics that would make the robot more similar to humans.
On the contrary, the self-determination group is mainly fascinated by the implementation of robots as full-fledged social partners who can become members of our society. However, their expectations are unrealistic as they believe that the technical improvements of robots are not particularly relevant to achieving complex social skills. Although this consideration requires further research, it is possible to speculate that the unrealistic expectations of the self-determination group are due to people's limited direct experience with robots.
In the middle of the continuum of humanization of robots, three other profiles have been identified: fuzzy, human attributes, and human relationship. The fuzzy group is generally not interested in development of specific robot features, plausibly representing the people least interested in robotic technologies.
Concerning the groups, human attributes and human relationships, both are interested in human-like performative improvements of robots. However, the group human attributes expects to have robots that will have some human attributes (human life factor higher than the mean, but not as high as in the self-determination group), but not the needed skills (i.e., medium levels of technical features, social–emotional resonance, and agency) to became really like a human. Vice versa, the fourth profile (i.e., human relationship) includes emerging adults who have more realistic expectations; in addition to the desire to enhance human characteristics (the human life factor score is higher than average), the members of this group also expect to improve robots in terms of social–emotional resonance and agency. A combination of human life skills, social–emotional resonance, and agency can result in a robot that is effectively able to interact as a human.
Another important consideration concerns the greater number of people who belong to the group of mechanical properties than other groups; this number suggests that the greatest portion of emerging adults is not expecting to interact with human robots in their future. In general, the greater tendency of people to prefer the mechanical improvement of robots is in line with the Eurobarameter 23 showing that the majority of the European population considers robots as tools that can support people (e.g., help people in hard or dangerous activities such as manufacturing, search and rescue, security, and so on) and not as peers of human beings.
Unexpectedly, people's expectations of the next generation of robots are independent of the sociodemographic features. This finding could be explained by the high interest that the Italian media took in robotic technologies in recent years: The wide dissemination of information about robots and their use may have made emerging adults sufficiently aware of these technologies 35 despite their gender, age, education level, and occupational status.
The wide dissemination of information about robots can also explain why the knowledge that people have about robots does not seem to produce any difference in their expectations. The only aspect of knowledge that makes the difference is the definition that people give to the robot. Definitions are related to the representation that people have of the robot (e.g., supportive vs. dangerous tool) and consequently to their attitudes toward robots.
Our study indeed shows how negative attitudes toward robots are strongly related to people's expectations. The self-determination group was identified as a benchmark regarding negative attitudes toward robots because we hypothesized that these individuals, desiring the most humanized robot, should have also expressed fewer negative attitudes compared with the other groups.
However, the data revealed a more complex scenario than initially assumed. The fewer negative attitudes of the groups, mechanical properties, fuzzy, human attributes, and human relationships, with respect to situations and interactions with robots could be explained by their desire to have robots that are efficient and useful, that is, more performative, independently of their purposes of use. In other words, these groups differ from the self-determination group as they are projected toward a future in which robots will be at the service of humans and under their control.
On the contrary, the members of the self-determination group are more worried about situations and interactions with robots compared with the others because their expectations are oriented toward autonomous human-like robots. Therefore, these people are more frightened of situations and interactions because they believe that robots will experience the complexity of human relational dynamics and, consequently, be out of human control. This hypothesis, although speculative, seems to be close to the experience lived by the protagonist of Ian McEwan's recent novel “Machines Like Me” 36 in which he is not only fascinated by the humanity of the android, named Adam, but also deeply frightened by his unpredictability in relationships.
However, to better clarify this picture of negative attitudes toward robots, it is important to also consider attitudes toward emotions. The results concerning negative emotional attitudes in the groups, mechanical properties, fuzzy, and human attributes, could be plausibly explained by their general concern for the humanization of robots and therefore by their greater relational autonomy, which on the contrary is desired by the groups, human relationship and self-determination.
Moreover, although the self-determination group is not particularly worried about emotional interactions with robots compared with other groups, it is also the most frightened of interactions. This apparently controversial result could be explained by the distance between expectations and desires: on the one hand, people in this group require the highest level of sophistication for robots because they are fascinated by the idea of a robot with human characteristics; on the other hand, they could be terrified, as in anticipation of the Uncanny Valley phenomenon. Moreover, the members of the human relationship group are more inclined to interact with robots than the other groups because, although they are not the only ones with few negative attitudes, they are those who combine the desire for human life aspects with the other skills (technical features, social–emotional resonance, and agency) necessary to have a functional robot.
In conclusion, this study identified emerging adults' expectations regarding development of future robots, detecting five profiles that can be placed along a continuum of humanization of robots. Although there is enough information about robots' current capabilities, people are still concerned about the role that robots will play in society. Therefore, it is important to design interactions between humans and robots, calibrated on the basis of the identified expectation profiles, to support people to overcome their negative attitudes and false myths/false expectations.
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This research was funded by Università Cattolica del Sacro Cuore (D3.2 – 2018 – Human-Robot Confluence project).
Appendix A1. Seventeen-Item Scale for Robotic Needs
| Questions (Italian) | Questions (English) | Dimension |
|---|---|---|
| Quanto ritieni importante per un generico robot ottenere: | How important do you think it is for a generic robot to: | |
| 1. Maggiore energia (es. durata della batteria) | Have more power (e.g., battery life) | Technical features |
| 2. Sistema di autoregolazione interna (es. sistema di raffreddamento in risposta ad aumento di calore interno). | Have an internal self-regulation system (e.g., cooling system in response to increased internal heat) | |
| 3. Processori, espansioni e potenziamenti hardware o software di vario tipo. | Have processors, expansions, and various types of hardware or software upgrades | |
| 4. Un aumento di capacità comunicative. | Increase its communication skills | Social–emotional resonance |
| 5. Un aumento di capacità di trasmettere e comunicare emozioni. | Increase its ability to transmit and communicate emotions | |
| 6. Un aumento di capacità di riconoscere e provare emozioni. | Increase its ability to recognize and experience emotions | |
| 7. Capacità di interagire con l'ambiente (es. mani più abili) | Have the ability to interact with the environment (e.g., highly skilled hands) | Agency |
| 8. Essere dotato di mansioni maggiori e più efficaci sensori specifici per l'adattamento a specifici ambienti. | Be equipped to perform highly skilled tasks and have very effective sensors for adaptation to specific environments | |
| 9. Poter svolgere compiti che prevedano il coinvolgimento di altre persone o robot. | Have the ability to perform tasks with other people or robots | |
| 10. Avere un compagno/a amico/a. | Have a friend/partner | Human life |
| 11. Avere un animale domestico. | Have a pet | |
| 12. Denaro. | Have money | |
| 13. Poter viaggiare. | Have the potential to travel | |
| 14. Avere del tempo libero. | Have free time | |
| 15. Poter ascoltare musica. | Have the ability to listen to music | |
| 16. Fare sport. | Play sports | |
| 17. Fare sesso. | Have sex |
Note: Using a 5-point rating scale (1 = not at all; 2 = little; 3 = quite; 4 = very; and 5 = very much), respondents show how important they think it is for a future robot to achieve the following features.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.